Строй-Техника.ру
Строительные машины и оборудование, справочник
Регулирование скоростей рабочих движений крановых механизмов непосредственно связано с регулированием характеристик электродвигателя. Для правильного управления краном необходимо уяснить происходящие в электродвигателе физические процессы. Поэтому перед рассмотрением конкретных схем управления крановыми механизмами необходимо более подробно изучить основные процессы регулирования двигателя.
Очевидно, что частота вращения ротора электродвигателя зависит от его конструкции и числа пар полюсов. Чем больше сила тока, тем более сильное магнитное поле ротора он создает. Взаимодействие двух сильных магнитных полей ротора и статора определяет крутящий момент на валу ротора. Частота вращения ротора асинхронного двигателя переменного тока при постоянном сопротивлении его цепи практически не изменяется в зависимости от момента внешней нагрузки во всем диапазоне. Механическая характеристика такого двигателя является жесткой в отличие от мягких характеристик двигателей постоянного тока.
Указанные механические характеристики органически присущи каждому типу электродвигателя, являются единственными и потому называются естественными в отличие от семейства других характеристик, получаемых искусственным путем за счет изменения режима работы двигателя благодаря введению в электропривод дополнительных элементов, называемых искусственными.
Рекламные предложения на основе ваших интересов:
Дополнительные материалы по теме:
Статор электродвигателя к короткозамкнутым ротором подключают непосредственно к сети, а так как сопротивление обмотки его ротора минимально, то в ней и в обмотке статора в период пуска (неустановившегося движения разгона ротора) течет ток большей величины. Величина пускового тока в 5—7 раз превышает величину нормального (рабочего) тока при установившейся частоте вращения ротора.
Основные недостатки электродвигателей с короткозамкнутым ротором следующие: высокие значения пускового момента вызывают большие ускорения механизма при каждом пуске, что затрудняет управление механизмом, обусловливает высокие динамические Лагрузки (удары) на детали и раскачивание перемещаемого краном груза; все пусковые потери, пропорциональные кинетической энергии привода, преобразуются в тепловую энергию и идут на нагрев обмотки двигателя; невозможность регулирования частоты вращения ротора вызывает необходимость повышения частоты включений привода, что также повышает нагрев электродвигателя.
Эти недостатки можно устранить, уменьшая величины пускового момента и соответственно ток в обмотке статора, для чего в цепь ротора вводят дополнительные резисторы, соответствующие установленным значениям пускового момента и тока. Двигатели с фазным ротором-позволяют ступенчато регулировать величины пускового момента и частоты вращения ротора, переходя с одной искусственной характеристики на другую.
Очевидно, что чем больше число ступеней пускорегулирующих резисторов в цепи ротора, тем более плавным будет нарастание частоты его вращения. При выходе на естественную характеристику обмотка ротора оказывается замкнутой накоротко, т. е. двигатель становится как бы с короткозамкнутым ротором и может работать в данном режиме продолжительно. Удается избежать больших пусковых моментов, перегрузки по току и динамическому нагружению, перегрева двигателя и других нежелательных явлений, присущих двигателям с короткозамкнутым ротором.
—
Любой электродвигатель берет из сети энергии столько, сколько требуется в данный момент, т. е. он регулирует сам потребность в питании, если мы изменяем нагрузку. Поэтому говорят, что электродвигатель — машина саморегулирующаяся. Вращающий момент электродвигателя автоматически изменяется при изменении момента сопротивления приводимого механизма. Поэтому электродвигателю не нужен никакой регулятор мощности.
Однако чаще всего нас интересует возможность регулирования числа оборотов электродвигателя независимо от нагрузки.
Но прежде чем перейти к рассмотрению способов регулирования скорости вращения электродвигателей, посмотрим, как ведет себя электродвигатель, включенный в электрическую сеть при плавном увеличении нагрузки от нуля до номинального значения — до 100%.
Возьмем стандартный электродвигатель постоянного тока с параллельным соединением обмотки возбуждения. Будем плавно увеличивать нагрузку, пока не достигнем величины полной номинальной нагрузки.
Будем измерять скорость вращения двигателя при каждом увеличении нагрузки и по результатам измерений построим график зависимости числа оборотов от нагрузки. Для этого построим две координатные оси — по горизонтали будем откладывать отрезки, пропорциональные нагрузке, а по вертикали — отрезки, пропорциональные числу оборотов. Тогда получим график, представленный на рис. 1. Полученная нами зависимость называется механической характеристикой электродвигателя.
Поскольку мы не применяли никаких искусственных приемов для изменения числа оборотов электродвигателя, кроме увеличения нагрузки, такая характеристика называется естественной механической характеристикой электродвигателя в отличие от искусственных или реостатных характеристик, которые можно получить вводя в схему электро-двигателя реостаты, изменяя напряжение на зажимах электродвигателя, отключая часть обмотки возбуждения или вводя дополнительные секции этих обмоток, иначе говоря, применяя искусственные приемы для получения характеристик, наиболее желательных для данного электропривода.
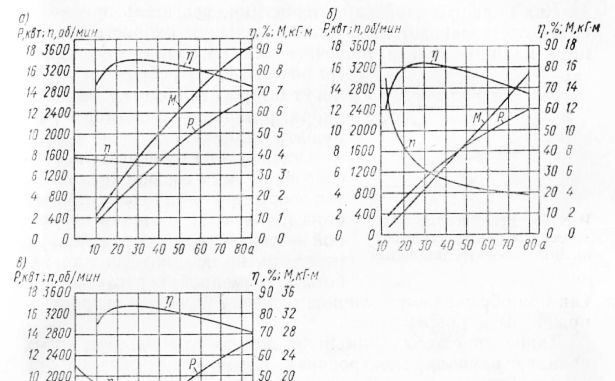
Рис. 1. Характеристики двигателей постоянного тока:
а — шунтового; б — сериесного; в — компаундного
Увеличивая нагрузку свыше 100%, получим продолжение прямолинейной характеристики до полной остановки двигателя. Эта естественная характеристика электродвигателя получена практическим путем до значения нагрузки 130—150%, дальнейший ход ее не совсем прямолинейный, но это и не имеет значения, так как до таких перегрузок электродвигатель не доводят.
Из приведенной характеристики электродвигателя с параллельным соединением обмотки возбуждения видно, что с увеличением нагрузки скорость вращения двигателя плавно снижается.
Познакомимся теперь с естественной характеристикой электродвигателя, имеющего последовательную обмотку возбуждения и представленную на рис. 1, б.
Как видно из этой характеристики, двигатель при холостом ходе развивает недопустимо большую скорость вращения, машину нельзя включать без нагрузки — ее может
«разнести», центробежные силы могут выбросить обмотку из пазов якоря, разорвать коллектор и разрушить машину.
Поэтому электродвигатель с последовательным соединением обмоток возбуждения пригоден для работы только со «связанной» нагрузкой — через редуктор, зубчатую передачу, но не пригоден для работы с ременной передачей, так как при обрыве ремня машина разовьет большую скорость и может быть повреждена.
Такие двигатели применяют для работы на подъемных кранах, трамваях, электрокарах, где не может быть работы без нагрузки.
Заметим, что при увеличении нагрузки скорость вращения такого электродвигателя довольно быстро уменьшается, характеристика его круто падающая, а не пологая, как у двигателя с параллельной обмоткой возбуждения.
Естественная характеристика электродвигателя со смешанным возбуждением приведена на рис. 1, в.
Электродвигатель со смешанным возбуждением, как видно из его характеристики, допускает работу на холостом ходу, но при увеличении нагрузки скорость вращения его надает довольно быстро., хотя и медленнее, чем у двигателя с последовательной обмоткой возбуждения.
Естественную характеристику можно значительно видоизменить и получить вместо одной — ряд искусственных характеристик, но естественная характеристика всегда останется основной, на которой можно построить искусственную характеристику. Поэтому необходимо сначала сделать выбор основного вида двигателя для каждого механизма крана. Кроме зависимости скорости вращения от нагрузки интересна допустимая перегрузка двигателя, ее продолжительность и диапазон регулирования скорости вращения.
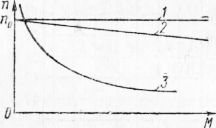
Рис. 2. Естественные механические характеристики различных электродвигателей
В зависимости от степени изменения скорости вращения при изменении момента нагрузки естественные механические характеристики делятся на три группы.
1. Абсолютно жесткая (/), когда скорость вращения двигателя не зависит от нагрузки, т. е. число оборотов его постоянно. Такую характеристику имеет синхронный двигатель, не применяемый в крановом оборудовании.
2. Жесткая (2), когда скорость вращения двигателя незначительно снижается при увеличении нагрузки от холостого хода до номинальной. Такую характеристику имеют двигатели постоянного тока с параллельным возбуждением, а также асинхронные двигатели с коротко-замкнутой обмоткой ротора.
3. Мягкая (3), когда скорость вращения двигателя в значительной степени зависит от нагрузки. Такую характеристику имеют двигатели постоянного тока с последовательным и смешанным возбуждением.
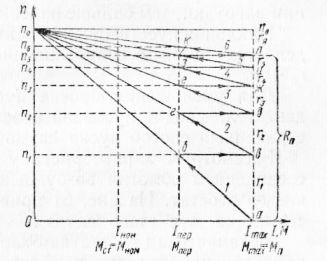
Рис. 3. Построение искусственных механических характеристик двигателя с параллельным возбуждением (шунтового)
Для смягчения толчков тока вводят сопротивление в цепь якоря электродвигателя и его характеристика при этом также «смягчается» — скорость вращения двигателя падает более резко с увеличением нагрузки, чем при естественной характеристике, наклон характеристики увеличивается.
Для уменьшения броска пускового тока в цепи якоря двигателя вводят пусковой реостат; такой наиболее распространенный способ пуска называется реостатным.
Здесь разобран пример пуска двигателя при ограничении тока до допустимого предела.
Искусственные механические характеристики двигателей постоянного тока с последовательным и смешанным соединением обмоток возбуждения, а также асинхронных двигателей с фазным ротором строятся аналогично.
Рекламные предложения:
Главная → Справочник → Статьи → Форум
Механизация земляных работ
Механизация строительства
Механизация дорожных работ
Автоматизация строительства
→ Бетонные работы
→ Мини-тракторы
 Разделы
Разделы
Строительные машины и оборудование
→ Для специальных земляных работ
→ Дорожно-строительные машины
→ Строительное оборудование
→ Асфальтоукладчики и катки
→ Большегрузные машины
→ Строительные машины, часть 2,
→ Дорожные машины, часть 2
→ Ремонтные машины
→ Ковшовые машины
→ Автогрейдеры
→ Экскаваторы
→ Бульдозеры
→ Скреперы
→ Грейдеры
Эксплуатация строительных машин
→ Эксплуатация средств механизации
→ Эксплуатация погрузочных машин
→ Эксплуатация паровых машин
→ Эксплуатация экскаваторов
→ Эксплуатация подъемников
→ Эксплуатация кранов перегружателей
→ Эксплуатация кузовов машин
→ Крановщикам и стропальщикам
Ремонт строительных машин
Ремонт дорожных машин
Ремонт лесозаготовительных машин
Ремонт автомобилей КАмаЗ
Техническое обслуживание автомобилей
Очистка автомобилей при ремонте
Материалы и шины
Остались вопросы по теме:
"Механические характеристики электродвигателей"
— воспользуйтесь поиском.
→ Машины городского хозяйства
→ Естественная история машин
→ Транспортная психология
→ Пожарные автомобили
→ Автомобили-рефрижераторы
→ Монтаж и эксплуатация лифтов
→ Тракторы