Строй-Техника.ру
Строительные машины и оборудование, справочник
Термины робот и манипулятор широко используются в технической литературе. Однако часто понимание их различно, поэтому воспользуемся определениями ГОСТ 25686—85.
Промышленный робот (ПР) — это автоматическая машина, стационарная или передвижная, состоящая из исполнительного устройства в виде манипулятора, имеющего несколько степеней подвижности, и перепрограммируемого устройства программного управления для выполнения в производственном процессе двигательных и управляющих функций. Манипулятор (М)— это управляемое устройство (или машина) для выполнения двигательных функций, аналогичных функциям руки человека при перемещении объектов в пространстве, оснащенное рабочим органом.
Промышленный робот состоит из следующих основных частей: исполнительной в виде одного или нескольких манипуляторов (М), устройств передвижения (УП) и управления (УУ). В состав УУ входят пульт управления (ПУ), с помощью которого оператор осуществляет ввод и контроль задания; запоминающее устройство (ЗУ), в котором хранятся программы работы и другая необходимая информация; вычислительное устройство (ВУ), в котором реализуется алгоритм управления через ЭВМ; блок управления приводами (БУП) манипулятора и механизма передвижения.
Рекламные предложения на основе ваших интересов:
Дополнительные материалы по теме:
Схема робота как автоматическая система показывает взаимосвязь УУ с объектом управления (О) и внешней средой (ВС). Дополнительно здесь показан комплекс чувствительных устройств ЧУ (датчиков), выявляющих состояние робота, транспортных и складских средств. Стрелками показано направление управляющей информации и обратной связи.
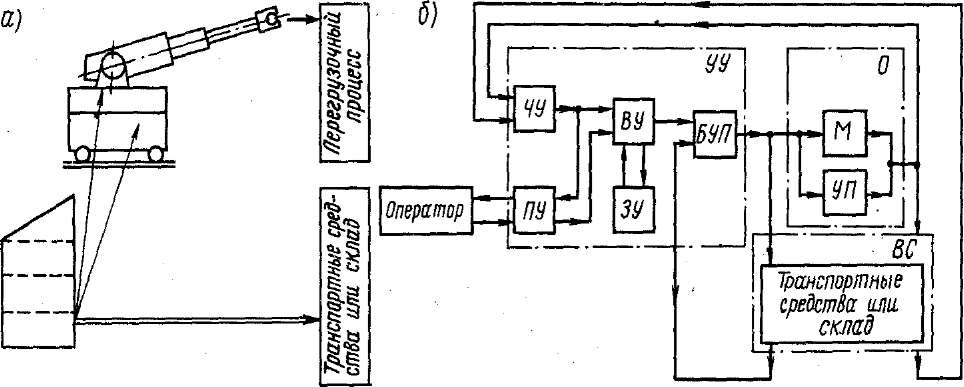
Рис. 1. Схема промышленного робота:
а — принципиальная; б — функциональная
Манипулятор робота обычно выполнен в виде многозвенного механизма с числом степеней подвижности от 3 до 9 и поступательными или вращательными сочленениями. На последнем звене механизма расположен рабочий орган в виде, клещевого или вилочного захвата, электромагнита, вакуумной присоски и пр. Каждая степень подвижности манипулятора имеет двигатель (пневматический, гидравлический или электрический). Существуют манипуляторы с одним двигателем на несколько степеней подвижности, снабженные механизмами распределения движений.
Промышленные роботы подразделены на три рода (поколения): программные, адаптивные и интеллектуальные.
Программные роботы имеют управляемые приводы во всех суставах. Их системы управления легко переналаживаются на выполнение различных операций. После каждой переналадки они повторяют многократно одну и ту же жесткую программу в строго определенной обстановке с определенно расположенными предметами. Адаптивные роботы могут самостоятельно в большей или меньшей степени ориентироваться в определенной обстановке, приспосабливаясь к ней. Для этого их снабжают специальными датчиками, реагирующими на обстановку, а также системой обработки информации, поступающей от датчиков, для выработки сигналов адаптивного управления, т. е. гибкого изменения программы движения манипулятора в соответствии с фактической обстановкой. И н -теллектуальные роботы имеют более развитые средства получения и обработки информации, позволяющие распознавать обстановку и с ее учетом автоматически вырабатывать решения о дальнейших действиях с целью выполнения необходимых технологических операций в изменяющейся обстановке. Они снабжены элементами искусственного интеллекта.
Поколения роботов не сменяют друг друга, а каждое из них применяется там, где оно экономически целесообразно. С развитием науки и техники роботы всех поколений будут более совершенными, надежными и быстродействующими.
Зона обслуживания робота — это пространство, в котором рабочий орган выполняет свои функции в соответствии с назначением и установленными параметрами. Форма и размеры зон определяются кинематической схемой манипуляционной системы робота.
Роботы и манипуляторы могут осуществлять перемещения рабочих органов в следующих системах координат: прямоугольной — по двум или трем взаимно перпендикулярным осям; цилиндрической — по радиусам под различными углами, а также по нормалям к ним; сферической — линейные перемещения по радиусу и угловые перемещения в двух взаимно перпендикулярных плоскостях; угловой — манипулирование за счет угловых перемещений звеньев в разных плоскостях.
Управление роботами и манипуляторами бывает ручное и программное. При ручном управлении оператор движением рук и ног дистанционно или непосредственно осуществляет перемещение рабочего органа. Программное управление осуществляется автоматически. Его разделяют на позиционное, контурное и адаптивное. При позиционном управлении движение рабочего органа происходит по заданным точкам позиций без контроля траектории движения между ними. Контурное управление позволяет осуществить движение рабочего органа по заданной траектории с установленным распределением скоростей по времени. При адаптивном управлении автоматически изменяется управляющая программа в функции контролируемых параметров состояния внешней-среды.
На железнодорожном транспорте погрузочно-разгрузочные и транспортно-складские работы занимают важное место по затратам труда, стоимости и объему. Для их выполнения используют различное подъемно-транспортное оборудование. Однако применение ро-бототехнических систем для перегрузки и сортировки грузов находится в зачаточном состоянии.
Сдерживающим фактором широкомасштабного применения робототехники на погрузочно-разгрузочных работах является широкая номенклатура перевозимых грузов железнодорожным транспортом. Решение проблемы затрудняется стесненностью условий работы внутри железнодорожных вагонов, автотранспортных средств и на складах. Разнообразна технология переработки грузов: разгрузка и погрузка на открытых площадках и в закрытых складских помещениях, отличающихся большой разнотипностью; перегрузка на другие виды транспорта, затаривание и пакетирование грузов, перевозка одинаковых грузов осуществляется вагонами разного типа. Отдельные виды грузов предъявляют жесткие требования по усилию захвата и ориентации.
Грузовая работа рассредоточена на большом числе железнодорожных станций. Трудно обеспечить равномерную подачу железнодорожного и автомобильного подвижного состава под погрузочно-разгрузочные операции.
Научные работники и конструкторы железнодорожного транспорта разрабатывают робототехнику для погрузочно-разгрузочных работ внутри крытых вагонов, загрузки автомобилей тарно-штучны-ми грузами, перегрузки контейнеров, выгрузки смерзшихся навалочных грузов из полувагонов и платформ, открытия и закрытия крышек люков специализированных полувагонов, очистки полувагонов от остатков грузов и пр.
Рекламные предложения:
Главная → Справочник → Статьи → Форум
Механизация земляных работ
Механизация строительства
Механизация дорожных работ
Автоматизация строительства
→ Бетонные работы
→ Мини-тракторы
 Разделы
Разделы
Строительные машины и оборудование
→ Для специальных земляных работ
→ Дорожно-строительные машины
→ Строительное оборудование
→ Асфальтоукладчики и катки
→ Большегрузные машины
→ Строительные машины, часть 2,
→ Дорожные машины, часть 2
→ Ремонтные машины
→ Ковшовые машины
→ Автогрейдеры
→ Экскаваторы
→ Бульдозеры
→ Скреперы
→ Грейдеры
Эксплуатация строительных машин
→ Эксплуатация средств механизации
→ Эксплуатация погрузочных машин
→ Эксплуатация паровых машин
→ Эксплуатация экскаваторов
→ Эксплуатация подъемников
→ Эксплуатация кранов перегружателей
→ Эксплуатация кузовов машин
→ Крановщикам и стропальщикам
Ремонт строительных машин
Ремонт дорожных машин
Ремонт лесозаготовительных машин
Ремонт автомобилей КАмаЗ
Техническое обслуживание автомобилей
Очистка автомобилей при ремонте
Материалы и шины
Остались вопросы по теме:
"Робототехнические системы для перегрузки и сортировки грузов"
— воспользуйтесь поиском.
→ Машины городского хозяйства
→ Естественная история машин
→ Транспортная психология
→ Пожарные автомобили
→ Автомобили-рефрижераторы
→ Монтаж и эксплуатация лифтов
→ Тракторы