Строй-Техника.ру
Строительные машины и оборудование, справочник
Схема управления подъемной машиной с пневматическим тормозом показана на рис. 1.
При подготовке машины к работе необходимо включить разъединитель Р1 или Р2, масляный выключатель ВМ, автомат А1 или А2 ввода 380 В и автоматы A3—А6 вспомогательных приводов.
При подаче постоянного тока в цепь управления получают питание реле ускорения РУ1—РУ8, которые притягивают свои якоря и размыкают при этом размыкающие контакты в цепях катушек контакторов ускорения У1—У8.
Рекламные предложения на основе ваших интересов:
Дополнительные материалы по теме:
Для пуска машины рукоятку рабочего торможения устанавливают в положение «Отторможено», а рукоятку управления командо-контроллера — в соответствующее крайнее положение. При пуске «Вперед» замкнутся контактыкомандоконтроллераКК-3, КК-5, КК-11. Катушки реверсора В и JI получат питание, и их силовые контакты замкнутся, благодаря чему обмотка статора подъемного двигателя получит питание от сети переменного тока. При замыкании блок-контакта реверсора В в цепи катушки реле дуговой блокировки РДБ последнее разомкнет свой контакт в цепи катушки реле ускорения РУ1. Реле РУ1, обесточившись, с выдержкой времени замкнет свой размыкающий контакт РУ1 в цепи катушки контактора У1. Контактор У1, включившись, силовыми контактами зашунтирует часть сопротивления (первую ступень) в цепи ротора и блок-контактами переключит питание катушки реле РУ2 через замыкающий контакт реле РТУ.
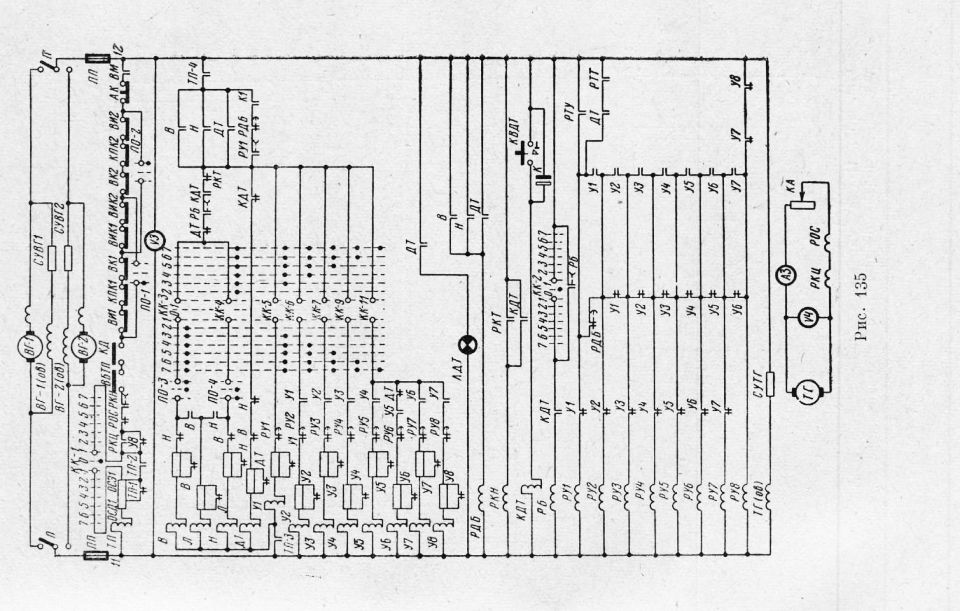
Рис. 1. Схема управления асинхронным подъемным двигателем подъемной машины с пневматическим тормозом
Вследствие того что при закорачивании первой ступени роторного сопротивления токовое реле ускорения РТУ еще не срабатывает (небольшой ток статора), реле РУ2 при замыкании контактора У1 сразу обесточивается и с выдержкой времени замыкает свой контакт в цепи катушки контактора У2. Контактор У2 срабатывает, силовыми контактами закорачивает следующую (вторую) ступень роторного сопротивления и своими блок-контактами переключает питание катушки реле РУЗ через контакт реле РТУ.
Если при замыкании второй ступени роторного сопротивления толчок тока в статоре получается достаточно болыпм, то реле РТУ срабатывает и замыкает свой контакт в цепи реле РУЗ и держит его замкнутым до тех пор, пока ток в статоре по мере увеличения скорости вращения ротора не снизится до величины, при которой якорь реле РТУ отпадет. При отпадании якоря реле РТУ размыкается его контакт в цепи реле РУЗ. Реле РУЗ, обесточившись, с выдержкой времени замкнет свой размыкающий контакт в цепи катушки контактора УЗ, который зашунтирует следующую ступень сопротивления в цепи ротора и переключит питание цепи реле РУ4 через контакт реле РТУ. Таким образом, пуск двигателя в зависимости от тока статора с дополнительной выдержкой времени будет продолжаться до тех пор, пока не замкнется последний контактор ускорения, и двигатель с замкнутым накоротко ротором будет работать с максимальной скоростью на естественной характеристике. На этом период разгона заканчивается и начинается равномерный ход.
На рис. 2 показаны цепи защиты и схема управления электроклапанами механизма перестановки с пневмотормозом.
На подъемных установках, вводимых в действие с 1963 г., применяют роторные станции управления с трехобмоточными реле РЭВ-800, осуществляющие изменение величины сопротивления в цепи ротора в функции времени с корректировкой по току.
Схема включения трехобмоточных реле ускорения показана на рис. 3. Трехобмоточное реле имеет три катушки: втягивающую РУ1, ссаживающую РУ2 и токовую РУЗ. Магнитные потоки втягивающей и токовой катушек направлены согласно, поток ссаживающей катушки — встречно по отношению к ним. При подаче напряжения на втягивающие катушки реле включаются. Токовые обмотки реле через потенциометр С9 и выпрямитель ВТ подключаются к вторичной обмотке трансформатора тока в статорной цепи двигателя. По токовой обмотке протекает ток, пропорциональный нагрузке двигателя. Выдержка времени реле определяется суммарными ампервитками всех трех обмоток. Чем больше нагрузка, тем больше ампервитки токовой обмотки реле, а следовательно, и выдержка времени реле. Описываемая схема позволяет автоматически выбирать оптимальную тахограмму пуска двигателя, при которой время разгона зависит от величины поднимаемого груза. Чем легче груз, тем меньше время разгона. Выдержка времени изменяется от веса поднимаемого груза таким образом, что поддерживается неизменное среднее значение пускового момента, оптимального для данной установки.
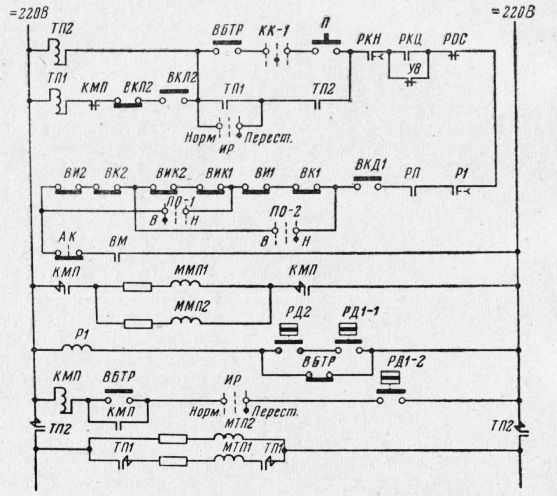
Рис. 2. Цепи защиты и схема управления электроклапа-нами механизма перестановки с пневмотормозом
По окончании равномерного хода при определенном положении указателя глубины, когда должно начинаться замедленное движение подъемной машины, машинист устанавливает рукоятку управления командоконтроллера в среднее положение размыкаются контакты КК-3, КК-5, КК-11, выключаются контакторы В и Л и контакторы ускорения. В результате подъемный двигатель отключается от сети и в случае надобности создает рабочим тормозом необходимое торможение для подхода подъемных сосудов к приемным площадкам с малой скоростью и окончательного стопо-рения машины. Генераторное торможение применяют только при спуске груза. Оно производится следующим образом. Машинист оттормаживает машину, перемещает рукоятку командоконтроллера-в положение, соответствующее вращению подъемного двигателя в направлении спуска, и машина под действием опускающегося груза приходит во вращение. При передвижении рукоятки командоконтроллера необходимо следить, чтобы при синхронной скорости ротор уже был замкнут накоротко.
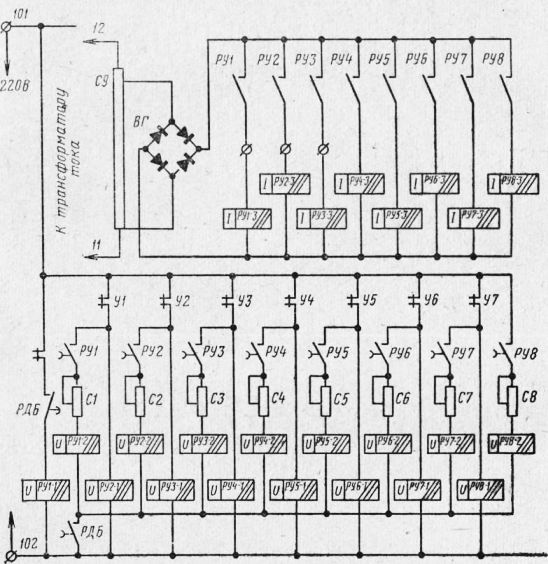
Рис. 3. Схема включения трехобмоточных реле ускорения:
РУ1—1—РУ8-1 — втягивающие катушки реле ускорения восьми ступеней; РУ1-2—РУ8-2 — ссаживающие катушки реле; РУ1-3—РУ8-3 — токовые катушки реле; РДБ — реле дуговой блокировки; С1—С8 — регулировочные сопротивления; С9 — потенциометр; ВТ — выпрямитель; У1—У7 — блок-контакты роторных контакторов
При спуске людей и грузов с пониженной скоростью или при создании рабочих замедлений машину переводят в режим динамического торможения; для этого нажимают кнопку КВДТ, которая разрывает цепь контактора КДТ. При этом замыкающий контакт КДТ отключит реверсивные контакторы В, JI и Н, а размыкающий КДТ подготовит цепь катушки контактора ДТ, которая получит питание после замыкания с соответствующей выдержкой времени контакта реле дуговой блокировки РДБ. Контактор ДТ, включившись, подает постоянный ток генератора- ГДТ в обмотку статора подъемного двигателя. При появлении в цепи статора постоянного тока реле РКТ, сработав, замкнет свой контакт РКТ в цепи реле РКН (которое после размыкания контакта КДТ питается через контакт РКТ) и разомкнет свой контакт РКТ в цепи катушек реверсоров В и Н. При отключении контактора КДТ размыкается его контакт, шунтирующий вторичную обмотку трансформатора тока обратной связи ТОС, включенного в цепь ротора.
При работе двигателя в режиме динамического торможения на обмотку возбуждения генератора ГДТ поступает питание от независимого источника возбуждения через сопротивление СУДТ и от выпрямителя обратной связи ВОС, включенного на вторичную обмотку трансформатора тока ТОС. Напряжение на зажимах выпрямителя ВОС зависит от тока ротора двигателя подъема. Чем больше ток, тем выше напряжение обратной связи*. Таким образом, с возрастанием внешнего момента на валу подъемной машины возрастает и ток, подаваемый в статор подъемного двигателя, и соответственно возрастает тормозной момент. Благодаря этому автоматически осуществляется устойчивая стабилизация скорости спуска.
При необходимости увеличения тормозного момента подъемного двигателя машинист перемещает рукоятку управления командоконтроллера от нулевого положения к любому крайнему и этим одновременно с уменьшением сопротивления в цепи ротора увеличивает (форсирует) возбуждение через блок-контакты У1—У5, шунтирующие части сопротивления СУДТ. Переключение ступеней пускового сопротивления в цепи ротора при динамическом торможении в функции тока ротора производится с помощью реле РТТ, включенного параллельно последней ступени роторного сопротивления. Работа реле РТТ аналогична работе реле РТУ в двигательном режиме.
Переход с двигательного режима на режим динамического торможения возможен при любом положении рукоятки управления командоконтроллера (при любой величине введенного в цепь ротора сопротивления), но для увеличения эффективности торможения при переходе на режим динамического торможения контакторы ускорения У1—У8 отпадают и с выдержкой времени, определяемой работой токового реле РТТ и настройкой реле ускорения РУ1—РУ5, замыкаются вновь до ступени, определяемой положением рукоятки управления командоконтроллера. В рассматриваемой схеме в режиме динамического торможения закорачивание сопротивления в цепи ротора ограничено пятью ступенями. Достигнуто это за счет введения замыкающего блок-контакта ДТ в цепь катушки контактора ускорения У6.
При аварийных режимах осуществляется предохранительное торможение. Предохранительный тормоз включается при разрыве цепи электромагнитов МТП и МТР контактором предохранительного тормоза ТП (см. рис. 135). При этом сердечники магнитов падают и переставляют золотники трехходового крана и регулятора давления в положение торможения. Контактор ТП обесточивается при размыкании контактов любого из аппаратов защиты, включенных в его цепь, а также при размыкании машинистом в случае надобности аварийной кнопки АК. Кроме того, предохранительное торможение может быть осуществлено вручную рукояткой предохранительного тормоза. В этом случае блокировочный выключатель предохранительного тормоза ВБТП размыкается и разрывает цепь ТП.
В описываемой схеме предусмотрены необходимые защиты и блокировки, вызывающие при нарушении нормального режима работы отключение подъемного двигателя от сети и включение предохранительного тормоза.
В тех случаях, когда для управления пневматическим тормозом подъемной машины применяется электропневматический регулятор РДБВ или РДБГ, управление ими осуществляется с помощью блока управления БЭРД-1, служащего для питания и контроля цепей управления, и сельсинного бесконтактного командоаппарата 846У-3-19, предназначенного для изменения тока в обмотке электромагнита регулятора давления.
На рис. 4 показана принципиальная электрическая схема ручного управления регулятором давления РДБВ или РДБГ.
Задающим бесконтактным элементам командоаппарата является сельсин СД. На первичную однофазную обмотку его подается переменный ток напряжением ИОВ от стабилизатора через трансформатор Тр. Во вторичную обмотку бесконтактного сельсина через выпрямитель включается обмотка ручного (дистанционного) управления ОУ1 регулятора. Напряжение в обмотке ОУ1 по величине и фазе зависит от угла поворота ротора сельсина, приводимого в движение рукояткой командоаппарата.
При передвижении рукоятки командоаппарата в положение «Заторможено» и повороте ротора сельсин-датчика во вторичной обмотке сельсина и в обмотке ОУ1 ток и м. д. с. увеличивается, якорь втягивается, закрывает клапаном выходное отверстие, золотник переставляется на впуск сжатого воздуха в цилиндры рабочего тормоза, и машина затормаживается тормозом.
При передвижении рукоятки командоаппарата в положение «Отторможено» ток и м. Д. с. в обмотке ОУ1 уменьшаются, якорь 7 с клапаном поднимаются, выходное отверстие 6 открывается, золотник переставляется на выпуск воздуха из цилиндров и машина оттормаживается. При любой промежуточной величине тока в обмотке ОУ1 якорь с клапаном занимают промежуточное положение, частично открывая выходное отверстие. Каждому промежуточному положению рукоятки командоаппарата ротора сельсина и якоря соответствует промежуточное давление воздуха в камере проточного регулирования и в цилиндре рабочего тормоза, а следовательно, и промежуточное тормозное усилие.
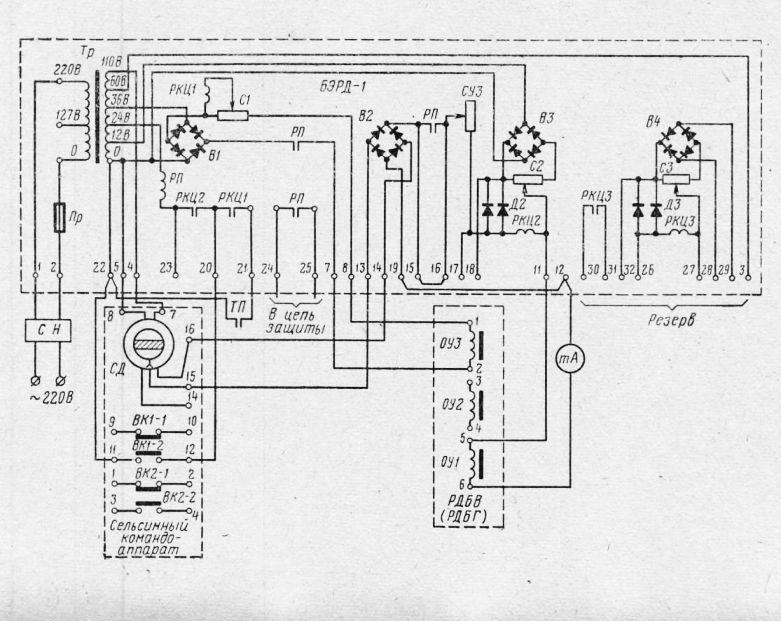
Рис. 4. Принципиальная электрическая схема ручного управления регулятором давления РДБВ или РДБГ
Контроль целостности цепей и обмоток управления ОУ1 и ОУЗ осуществляется токовыми реле РКЦ2 и РКЦ1 с шунтирующими сопротивлениями С1 и С2. Ток в обмотке ОУ1 колеблется от 25 до 300 мА, а ток срабатывания реле равен 8—10 мА, поэтому кроме шунтирующего сопротивления С2 предусмотрено подпирающее напряжение, снимаемое с выпрямителя ВЗ, подключенного на 12 В вторичной обмотки трансформатора Тр. Подпирающее напряжение не позволяет току ответвляться в сопротивление С2 до тех пор, пока ротор сельсина не повернется на такой угол, при котором напряжение ротора превысит подпирающее напряжение. В этом случае диоды Д2 отопрутся и в дальнейшем ток в обмотке ОУ1 будет увеличиваться за счет протекания через сопротивление С2.
При исправном состоянии обмотки ОУ1 и ОУЗ реле РКЦ2 и РКЦ1 обтекаются током, их контакты РКЦ2 и РКЦ1 в цепи реле РП замкнуты, контакты реле РП в цепи защиты и обмоток ОУ1 и ОУЗ тоже замкнуты. При этом якорь притянут вверх и не оказывает влияния на перемещение якоря.
При обрыве цепи обмоток управления ОУ1 или ОУЗ соответственно отключаются реле РКЦ2 или РКЦ1, размыкают свои контакты в цепи реле РП. Контакты РП в цепи защиты и обмоток управления размыкаются, якорь отпадает под действием пружины, якорь опускается, закрывая выходное отверстие и переставляя золотник регулятора на впуск воздуха в цилиндры рабочего тормоза, тем самым создавая первую ступень предохранительного торможения.
При исправных цепях обмоток управления первая ступень предохранительного торможения создается при срабатывании аппаратов защиты, разрыве ими цепи контактора ТП и размыкания контакта ТП в цепи реле РП.
После устранения причины включения предохранительного тормоза рукоятку командоаппарата переводят в положение «Заторможено», при котором замыкается контакт В К1-2, подается напряжение на реле РП, замыкаются контакты РП в цепи обмоток ОУ1 и ОУЗ и на их обмотки подается напряжение.
Электрический блок БЭРД-1 устанавливают на одной из станций управления или на свободном месте, удобном для обслуживания.. Сельсинный бесконтактный командоаппарат встраивают в пульт управления.
В схемах управления подъемными машинами с пневмотормозом в последнее время для управления приводом тормоза применяют аппаратуру КУПТ.
Принципиальная электрическая схема управления регулятором РДУ показана на рис. 139.
От стабилизатора СН напряжение подводтся к клеммам 0—220 В трансформатора Tpl. С клемм 0—60 В напряжение снимается на обмотку возбуждения сельсина СЗ, а с клемм 12—60В — на выпрямительный мост В1.
Катушка управления регулятором КТР включена на выпрямительный мост, состоящий из двух кремниевых диодов В2 и трансформатора Тр2 со средней точкой 18. Клеммы 16—17 трансформатора Тр2 включены на обмотку синхронизации сельсина СЗ. В цепь КТР включено реле контроля цепи РКЦ, сопротивление R3 и миллиамперметр.
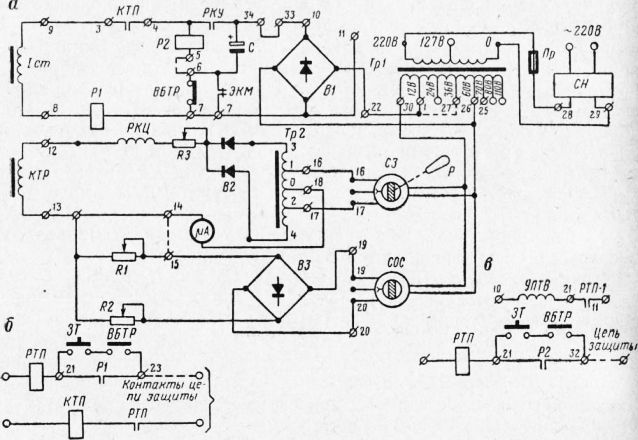
Рис. 5. Принципиальная электрическая схема управления регулятором РДУ с блоком БУТ:
а — основная схема; б — включение КТП при пневмогрузовом приводе тормоза или пружинно-пневматическом без I ступени предохранительного торможения, в — включение цепи защиты при управлении гидроприводом торщоза с применением УПТВ
Катушка управления первой ступени торможения lcm включена на мост В1. Последовательно в цепь катушки lcm включены реле Р1 типа РМ-4, н. о. контакт КТП контактора тормоза предохранительного и контакт реле РКЦ. Контакт реле Р1 включен в цепь реле предохранительного тормоза РТП цепи защиты.
При подаче напряжения на стабилизатор СН по цепи катушки КТР потечет дежурный ток 25—50 мА, если рукоятка командоаппарата установлена в положение «Заторможено» при пружинно-грузовом пневматическом приводе тормоза, или наибольший ток 160—170 мА при пневматическом приводе тормоза. Реле РКЦ сработает и замкнет свой контакт в цепи катушки lcm, и по ней потечет ток 180 мА при заряженном предохранительном тормозе.
При перемещении рукоятки командоаппарата в сторону «Оттор-можено» ток в катушке КТР будет увеличиваться при пружинно-грузовом пневматическом приводе тормоза и уменьшаться при пневматическом приводе тормоза. Для регулирования наибольшего тока в катушке КТР служит сопротивление R3.
Для контроля целостности цепи катушки КТР предназначено реле РКЦ, контакт которого включен в цепь катушки и реле. Реле контролирует целостность цепи катушки.
При пробое любого из диодов выпрямителя В2 или обрыве цепи катушки КТР отключается реле РКЦ, катушка обесточивается, обеспечивая первую ступень предохранительного торможения. Одновременно отключается реле Р1, осуществляя предохранительное торможение. Предохранительный тормоз срабатывает также и при обрыве цепи катушки или выходе из строя диодов моста В1.
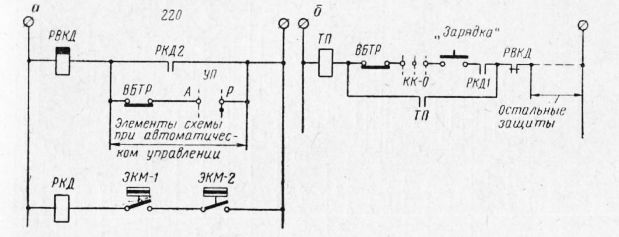
Рис. 6. Схема управления приводом тормоза:
а — цепь управления; б — цепь защиты
Для зарядки предохранительного тормоза нужно рукоятку командоаппарата Р установить в положение «Заторможено» и нажать кнопку зарядки тормоза ЗТ.
При применении регуляторов РДУ-1 и РДУ-2 для управления приводом тормоза подъемных машин НКМЗ необходимо для контроля давления воздуха в цилиндре рабочего тормоза устанавливать па этих цилиндрах электроконтактные манометры ЭКМ или реле давления.
В схеме управления приводом тормоза устанавливают два реле постоянного тока: РВКД и РКД, причем реле РВКД должно иметь выдержку времени при отключении.
В цепь реле РКД включают последовательно контакты электроконтактных манометров или реле давления. Реле РКД включено, когда в цилиндрах рабочего тормоза есть необходимое давление для Удержания машины в заторможенном положении. Контакт РКД-1 реле РКД вводится в цепь защиты последовательно с кнопкой зарядки тормоза ЗТ. Контакт РКД-2 вводится в цепь питания реле контроля давления РВКД. Контакт РКД-2 шунтируется при ручном управлении контактором ВБТР.
При установке рукоятки рабочего тормоза в положение «Заторможено» размыкается контакт ВБТР в цепи реле РВКД, и питание реле РВКД будет осуществляться через контакт РКД-2 в том случае, если в цилиндрах рабочего тормоза есть необходмое давление. При отсутствии же давления в цилиндрах рабочего тормоза реле РВКД разомкнет с выдержкой времени свой контакт в цепи защиты.
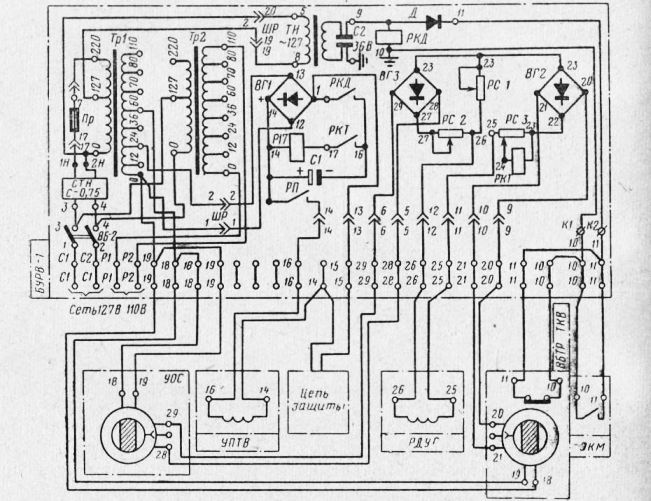
Рис. 7. Принципиальная схема управления регулятором РДВП с использованием блока БУРВ-1
Быстрые перемещения рукоятки рабочего тормоза около положения «Заторможено», которые производит иногда машинист при «зарядке» машины, если она не «заряжается», приводят к включению и удержанию в этом положении реле РВКД контактом ВБТР не^ смотря на то, что давления воздуха в цилиндрах рабочего тормоза нет. Для исключения «зарядки» подъемной машины при неисправном рабочем тормозе контакт РКД-1 не позволяет зарядить машину при отсутствии необходимого давления в цилиндрах рабочего тормоза даже при быстрых перемещениях рукоятки рабочего тормоза.
Принципиальная электрическая схема управления регулятором РДВП с использованием блока БУРВ-1 показана на рис. 7.
Обмотка управления регулятором КТР включена на обмотку синхронизации командоаппарата через выпрямитель.
В цепь КТР включены два регулировочных сопротивления РС1 и РСЗ. Выпрямитель ВГЗ и сопротивление РС2 используются при работе схемы с регулятором РДУГ. Обмотка статора сельсина включена на клеммы 0—60 В вторичной обмотки трансформатора.
Статор сельсина командоаппарата установлен так, что когда рукоятка командоаппарата находится в положении «Заторможено», по обмотке КТР протекает дежурный ток 25—30 мА, который удерживает РКТ включенным при заторможенной машине и исправном состоянии электрической цепи. При установке рукоятки командоаппарата в положение «Отторможено» ток в цепи катушки увеличивается от 160 до 200 мА.
При необходимости величину тока в обмотке управления КТР можно ограничить вводом сопротивления.
Для контроля исправности механической части регулятора РДВП имеется реле РКД, которое включено в цепь искробезопасного трансформатора ТИ и питается через параллельно включенные контакты ВБТР (выключатель ВК-211, установленный на командо-аппарате) и нормально закрытый контакт ЭКМ на электроконтактном манометре.
При установке командоаппарата в положение «Заторможено» через обмотку управления КТР протекает ток 20—35 мА. Давление в рабочем цилиндре равно нулю, и машина заторможена. По реле РКТ протекает ток, достаточный для удержания его контактов в закрытом положении. Блокировочный выключатель ВБТР замкнут. Реле РКД обтекается током, и его контакты в цепи реле РП закрыты.
Промежуточное реле РП обтекается током, и его н. о. контакт, включенный в цепь защиты, закрыт.
При перемещении рукоятки командоаппарата в положение «Отторможено» ток, протекающий по обмотке управления КТР, увеличивается от 160 до 200 мА. Каждому промежуточному положению рукоятки командоаппарата соответствует определенное давление в цилиндрах рабочего тормоза.
При перемещении рукоятки командоаппарата в положение «Заторможено» ток в обмотке управления уменьшается, давление в цилиндрах рабочего тормоза (ЦРТ) снижается.
Защита от повреждения электрической схемы или заклинивания золотника осуществляется следующим образом.
При исчезновении напряжения на входе в блок управления или обрыве цепи питания катушки управления КТР обесточивается реле РП или РКТ, которое размыкает свой контакт в цепи реле РП. Реле РП размыкает свой контакт в цепи защиты, и выключается предохранительный тормоз.
Защита от повреждения пневмосети и заклинивания золотника осуществляется с помощью реле РКД.
При нормальной работе системы реле РКД шунтируется контактами ВБТР или ЭКМ. Когда рукоятка командоаппарата установлена в положение «Заторможено», ВБТР разомкнут, а ЭКМ замкнут, так как давление в ЦРТ равно нулю. При движении рукоятки командоаппарата в положение «Отторможено» ВБТР замыкается, а ЭКМ размыкается, так как давление в ЦРТ повысится. При резком затормаживании ВБТР размыкается раньше, чем замкнется ЭКМ. Чтобы в таких случаях не происходило предохранительного торможения, контакт РКД включен в цепь реле РП так, что при разрыве контакта РКД реле РП отключается с выдержкой времени за счет параллельно включенного конденсатора С1.
Если же золотник заклинит в положении, когда в ЦРТ наибольшее давление, то при установке рукоятки в положение «Заторможено» ВБТР разомкнётся, а ЭКМ не замкнется, РКД разорвет свой контакт в цепи РП, а РП с выдержкой времени разорвет свой контакт в цепи защиты, и сработает предохранительный тормоз.
Рекламные предложения:
Главная → Справочник → Статьи → Форум
Механизация земляных работ
Механизация строительства
Механизация дорожных работ
Автоматизация строительства
→ Бетонные работы
→ Мини-тракторы
 Разделы
Разделы
Строительные машины и оборудование
→ Для специальных земляных работ
→ Дорожно-строительные машины
→ Строительное оборудование
→ Асфальтоукладчики и катки
→ Большегрузные машины
→ Строительные машины, часть 2,
→ Дорожные машины, часть 2
→ Ремонтные машины
→ Ковшовые машины
→ Автогрейдеры
→ Экскаваторы
→ Бульдозеры
→ Скреперы
→ Грейдеры
Эксплуатация строительных машин
→ Эксплуатация средств механизации
→ Эксплуатация погрузочных машин
→ Эксплуатация паровых машин
→ Эксплуатация экскаваторов
→ Эксплуатация подъемников
→ Эксплуатация кранов перегружателей
→ Эксплуатация кузовов машин
→ Крановщикам и стропальщикам
Ремонт строительных машин
Ремонт дорожных машин
Ремонт лесозаготовительных машин
Ремонт автомобилей КАмаЗ
Техническое обслуживание автомобилей
Очистка автомобилей при ремонте
Материалы и шины
Остались вопросы по теме:
"Схема управления подъемной установкой с пневматическим тормозом"
— воспользуйтесь поиском.
→ Машины городского хозяйства
→ Естественная история машин
→ Транспортная психология
→ Пожарные автомобили
→ Автомобили-рефрижераторы
→ Монтаж и эксплуатация лифтов
→ Тракторы