Строй-Техника.ру
Строительные машины и оборудование, справочник
Для механизации складских работ с рулонами большой массы и габарита используются грузоподъемные машины (электрические тали, мостовые, краны, многопролетные краны и т. й.) Машины снабжаются захватными приспособлениями, позволяющими разворачивать рулон из горизонтального положения в вертикальное и наоборот. Существует несколько конструкций захватных приспособлений. Все они делятся на самозажимные и приводные.
К самозажимным относятся простейшие грузозахватные приспособления зажимного действия, обладающие одним рабочим движением, подчиненным операции захватывания груза. Другие операции, связанные с поворотом груза в горизонтальной плоскости и его кантованием, эти захваты, как правило, не выполняют. Усилие, сжимающее груз в этих захватах, обеспечивается массой самого груза, предварительное сжимание груза при постановке захвата на груз —массой самого захвата, а освобождение груза, т. е. увеличение размаха колодок захвата — массой части механизмов захвата.
Такие грузозахватные приспособления обычно выполняются автоматическими либо полуавтоматическими, причем в последнем случае автоматизируется фиксирование рычагов раскрытого захвата, т. е. такое расположение рычагов, которое соответствует наибольшему размаху колоДок захвата. Освобождается рычаг грузозахватного устройства для последующего осуществления зажима поднимаемого груза, как правило, вручную.
Рекламные предложения на основе ваших интересов:
Дополнительные материалы по теме:
Полная автоматизация работы самозажимных грузозахватных приспособлений обеспечивается применением различных бесприводных механизмов, срабатывающих от изменения расположения одной детали захвата относительно другой. Это позволяет осуществлять погрузочные работы на штабеле без участия рабочего.
Самозажимные грузозахватные приспособления используются, как правило, для грузов стандартных размеров.
Применение самозажимных грузозахватных приспособлений на грузах, отличающихся большим колебанием размеров, приводит к громоздкости и большой массе таких устройств.
Пциводными захватами, выполняющими обычно несколько операций с грузом, как-то: захватывание, поворот в горизон-тельной плоскости, кантование и т. д., оснащаются, как правило, специальные краны. Однако приводные грузозахватные приспособления управляются крановщиком и обеспечивают высокую производительность кранов. Примером таких грузозахватных приспособлений могут служить захваты для рулонов бумаги и картона.
Перегрузка рулонов картона либо бумаги на складах крупных бумажных фабрик сопровождается их кантованием во время транспортирования. Необходимость кантования рулонов объясняется тем, что в целях наилучшего использования объема складов рулоны в штабеле устанавливают на торец, а из цеха поступают они по конвейеру в горизонтальном положении. Поэтому требования к грузозахватным приспособлениям для рулонов бумаги и картона заключаются не только в надежном захватывании, но и в возможности кантования при перегрузке.
Для складирования рулонов применяют поворотно-клещевые захватные приспособления. Одна из конструкций самозажимного захвата состоит из траверсы и двух боковых лап (клещей), скользящих по трубам, размещенным внутри траверсы. Каждая боковая лапа оканчивается внизу рычажным устройством с шарнирно прикрепленной к нему поворотно-зажимной щекой. Груз захватывается следующим образом: боковые лапы скользят по направляющим трубам при помощи электрического привода, присоединенного к ходовому винту с правой и левой резьбой, и производят предварительный прижим к рулону. При подъеме траверсы и под влиянием массы рулона рычажное устройство еще сильнее зажимает рулон между лапами. Рулон захватывается не посередине, а ближе к одному из его концов. Поэтому при подъеме рулон вместе с клещами разворачивается в шарнирах и приобретает вертикальное положение. Грузоподъемность захватов 600, 1200 и 1600 кг.
В отдельных случаях при вертикальной укладке рулонов и небольшом грузообороте применяют самозажимной цанговый захват, подвешиваемый к крюку любой грузоподъемной машины, установленной на складе. Такой захват состоит из направляющего стакана и центрального стержня, проходящего через верхнюю часть стакана. В верхней части стержня имеется проушина для крюка крана, а нижняя его часть заканчивается конусом и выполнена в виде разрезного кольца. Для подъема рулона стакан со стержнем вставляется в гильзу рулона. При подъеме стержня нижняя разрезная часть стакана раздвигается и захватывает рулон, который удерживается на стакане силами трения. Растворы цангового захвата для рулонов бумаги характеризуются следующими величинами:
Для одновременного подъема нескольких рулонов цанговые захваты подвешиваются на подвеске — траверсе длиной до 5 м.
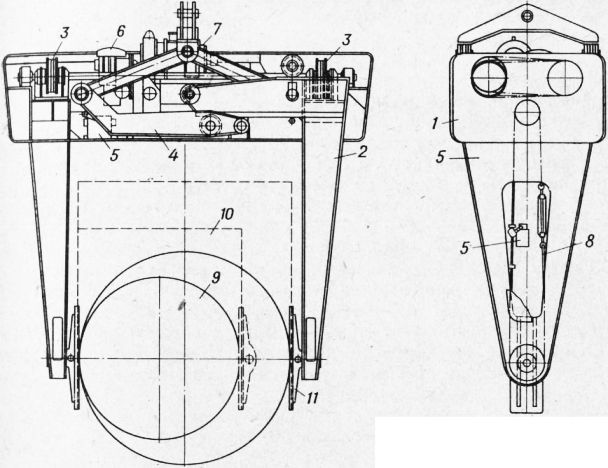
Рис. 1. Поворотно-клещевой захват для рулонов бумаги и картона с электрическим приводом:
1 — корпус; 2 — несущая стойка; 3 — канатные блоки; 4 — рычаги; 5— концевой выключатель; 5 — двигатель механизма поворота; 7 — двигатель механизма зажима рулонов; 8 — канат диаметром 8 мм, длиной 11 м; 9 — рулон в горизонтальном положении; 10 — рулон в вертикальном положении; 11 — зажимные планки
Поворотно-клещевой захват с электрическим приводом состоит из корпуса и двух лап с удерживающими планками и предназначен для работы с рулонами диаметром 1000—1300 мм, длиной 1500—2060 мм и массой до 2,7 т. Одна из лап приварена к корпусу и составляет с ним одно целое. Вторая лапа подвижная, ее ход 300 мм. В нижней части лап на осях укреплены зажимные поворотные планки шириной 200 мм, высотой 600 мм, которыми захватываются рулоны бумаги. На рабочие поверхности зажимных планок методом металлизации нанесен слой металлического порошка, обеспечивающий хорошее сцепление планок с рулонами (рабочая поверхность планок некоторым образом напоминает грубую наждачную бумагу).
В захвате имеются два механизма: для зажима и поворота рулонов.
В механизме для зажима рулонов перемещение подвижной лапы, а следовательно, зажим рулонов осуществляются установленным в корпусе захвата двигателем мощностью 1,3 кВт через редуктор, винты и гайку. Подвижная Г-образная лапа монтируется в корпусе на специальных роликах-катках, которые перемещаются по особым направляющим на вертикальных стенках корпуса.
Зажим рулонов регулируется конечными включателями, которые автоматически выключают двигатель при достижении требуемой степени зажима, когда рулон удерживается в вертикальном положении.
Установленный в корпусе захвата механизм поворота рулонов из горизонтального положения в вертикальное и наоборот приводится в движение от мотор-редуктора мощностью 0,6 кВт. Редуктор соединен с приводным валом, проходящим через корпус захвата. На валу насажены два шкива-барабана для канатов. Аналогичные шкивы-барабаны имеются также на осях у зажимных планок. Верхние и нижние шкивы соединены стальными канатами, при помощи которых приводятся во вращение зажимные поворотные планки. Конечный выключатель автоматически отключает двигатель механизма поворота рулона, как только рулон при повороте достигнет вертикального положения. После остановки в этом положении рулон можно повернуть в обратную сторону на 180°.
В вертикальном положении рулон ставится в штабель на складе или снимается с него.
Одним из условий успешной работы захвата является довольно точный зажим рулона бумаги по высоте. Несовпадение центров зажимных планок с центром рулона по высоте не должно превышать 5 см. При эксцентриситете более 10 см работа становится затруднительной.
Существуют захваты с гидравлическим приводом, где прижим колодок к рулону осуществляется двумя гидроцилиндрами. Третий гидроцилиндр разводит лапы зажима при увеличении размера захватываемого рулона. На такие захваты устанавливаются маслобак, насосная станция и золотники с электромагнитным управлением. Работой захвата управляет крановщик из кабины крана по кабелю, идущему от кабельного барабана, расположенного на крановой тележке, к захвату.
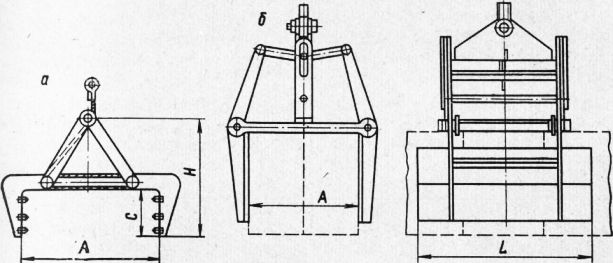
Рис. 2. Захваты для кип:
а — храпцы самозажимные; б — боковой захват; А — раствор захвата; Н — высота храпцов; С — высота челюсти храпцов; L — ширина лап бокового захвата
Для складирования кип целлюлозы применяют захваты другой конструкции. Большинство захватов обеспечивает подъем одной—четырех кип одновременно.
В храпцах самозажимных боковые рычаги имеют шипы, которые несколько вдавливаются в кипы. В боковом захвате верхняя тяга шарнирно соединена с двумя наклонными пластинами, связанными вертикальными рычагами, нижние части которых захватывают груз. Когда тяга поднимается, средний шарнир наклонных рычагов перемещается вверх, вертикальные рычаги поворачиваются вокруг шарниров, вследствие того, что верхняя часть их расходится в стороны и кипы зажимаются. Все захваты подвешиваются к крюкам грузоподъемных машин.
Оригинальным примером самозажимного грузозахватного приспособления для кип целлюлозы является захват, приведенный на рис. 3. Это приспособление является бесприводным захватом с поступательно движущимися Г-образными зажимами.
Грузозахватное приспособление подвешивается непосредственно на крюк крана при помощи грузовой петли. Передвижение зажимов, т. е. захватывание и освобождение груза, осуществляется под действием собственной массы захвата.
Основные части захвата: рама, зажимы и механизм перемещения зажимов, являющихся одновременно автоматическим фиксирующим устройством.
Рама захвата сварной конструкции изготовляется из листовой стали. Она имеет параллельные направляющие, по которым перемещаются зажимы, а также кронштейны, во втулках которых вращаются валы механизма передвижения зажимов.
Г-образные зажимы выполнены из стали методом свободной ковки. Два зажима на своей горизонтальной части несут жестко прикрепленную зубчатую рейку. Эти два зажима взаимодействуют с зубчатыми колесами механизма передвижения и при вращении их перемещаются вдоль направляющих внутри рамы захвата, зажимая или освобождая при этом груз.
Два других зажима на оконечностях своей горизонтальной части имеют отверстия, при помощи которых шарнирно соединяются с коромыслом, смонтированным также ца шарнире в средней части рамы. Такое закрепление зажимов позволяет при необходимости создать их перекос, что обеспечивает равномерное зажатие груза при неравных его размерах в зонах действия рядом стоящих зажимов.
В нижних оконечностях своих вертикальных частей Г-образные зажимы несут прижимные колодки, выполненные из листовой стали и приваренные к ним.
Механизм передвижения состоит из двух тяг, шарнирно соединенных между собой в верхней части штырем грузовой скобы; двух кривошипов, несущих на себе двусторонний храповой упор; двух валов, установленных в кронштейнах рамы, и двух зубчатых колес, сцепляющихся с зубчатыми рейками подвижных зажимов.
Тяги выполнены из листовой стали в форме треугольника. При вершинах углов, прилегающих к большой стороне, имеются отверстия для шарнирного соединения тяги с грузовой скобой и кривошипом.
Вблизи этих отверстий находятся криволинейный паз для ограничения поворота кривошипа и собачка храпового устройства, сидящая на пальце и соединенная пружиной с тягой.
Кривошипы выполнены из листовой стали, приварены к валам механизма передвижения и имеют отверстие для шарнирного соединения с тягой, палец ограничителя поворота кривошипа и двусторонний храповой удар.
Автоматическая работа грузозахватного приспособления обеспечивается чередованием встречных поворотов кривошипа на угол, не превышающий 180°.
В исходном положении, соответствующем наибольшему размаху колодок захвата, кривошип расположен горизонтально, палец ограничителя поворота кривошипа — в глухом конце криволинейного паза тяги, а подвижные зажимы выдвинуты в свое крайнее положение.
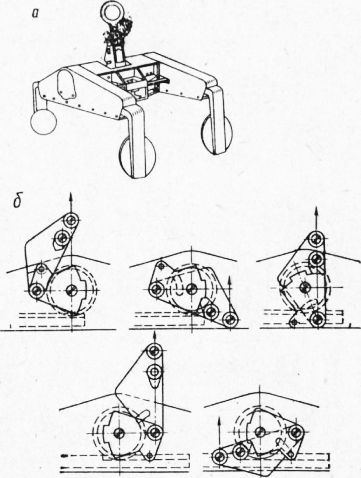
Рис. 3. Самозажимное грузозахватное приспособление для кип целлюлозы фирмы «Эриксон» (Швеция):
а — общий вид; б — последовательность работы автоматического фиксирующего устройства
При постановке захвата на груз и продолжении движения крюка крана вниз, тяга, вращаясь вокруг шарнира на кривошипе, переходит в горизонтальное положение. Собачка при этом проходит упор храповика и при последующем обратном движении тяги, соответствующем подъему крюка крана, входит с ним в зацепление. При дальнейшем движении тяги вверх, т. е. при работе лебедки крана на подъем, собачка, воздействуя на упор храповика, приводит в движение кривошип; происходит вращение зубчатого колеса и связанное с ним перемещение зажимов, при котором груз зажимается. После прекращения движения зажимов начинается подъем груза и его транспортирование.
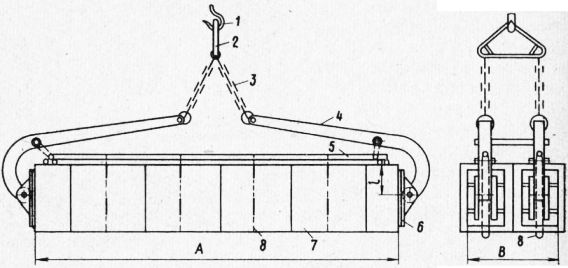
Рис. 4. Захват для одновременного транспортирования пакета из 20 кип целлюлозы:
1 — крюк грузоподъемного крана; 2 — рамка; 3 — подвесные цепи; 4 — главные рычаги; 5 — опорная рама телескопической формы; 6 — Зажимные пластины; 7 — кипа целлюлозы; 8 — бесконечные, в виде петли, цепи между кипами, подвешиваемые к опорной раме захвата; А—раствор захвата; В—ширина захвата; I — расстояние от центра захвата до нажимных роликов
Для освобождения груза после постановки его на место осуществляется дальнейшее опускание крюка крана. Тяга захвата при этом опускается до горизонтального положения, собачка проходит упор храповика и при последующем обратном движении тяги, соответствующем подъему крюка крана, входит в зацепление с ним. В дальнейшем при движении тяги вверх части механизма передвижения взаимодействуют аналогично операции зажатия груза, только в обратном направлении. Вращающееся зубчатое колесо отводит подвижные зажимы в крайнее положение — груз освобожден. В конце цикла освобождения груза палец ограничителя поворота кривошипа входит в криволинейный паз тяги и, дойдя до его конца, препятствует дальнейшему вращению кривошипа. Захват легко снимается с груза и готов к повторению цикла. На рис. 8.6,6 показана последовательность работы автоматического фиксирующего устройства.
Захват может быть применен для перегрузки грузов широкой номенклатуры, упакованных в кипы.
Существуют захватные приспособления для кип большей грузоподъемности. Так, находит распространение захватное приспособление, которое может транспортировать за один цикл 20 кип массой 200 кг каждая. Захват подвешивается к крюку крана, установленного в складе. Кипы с помощью кантователя устанавливают в два ряда по 10 шт. Пакет кип зажимается между специальными пластинами. Рычаги связаны рамой телескопической формы на случай изменения толщины кип или числа их в пакете. В опущенном состоянии захват опирается на кипы четырьмя парами роликов. Между двумя каждыми кипами пропускается цепь в виде петли, прикрепленная к раме, для увеличения надежности зажима кип и повышения трения между ними. Рабочий устанавливает захват на пакет кип и при помощи лопатки раздвигает их и пропускает между ними цепи. Рычаги в опущенном положении закрепляются защелкой автоматически, поэтому при погрузке для освобождения захватов обслуживающего персонала не требуется.
Захват надежен в работе, безопасен и не повреждает кипы. На складе пакеты укладываются на высоту 15—16 м (14— 16 кип, установленных на торец) вразброс, иногда с разворотом пакетов на 90° по отношению к нижележащим пакетам. Между торцами пакетов оставляют промежутки 200 мм, между рядами по высоте устанавливают прокладки.
Штабель из кип, установленных на торец, устойчивее штабелей из кип, установленных на широкую грань. Это объясняется тем, что размеры кип по длине листа большей частью одинаковы, тогда как высота кип после прессования неодинакова.
Повреждений нижних рядов кип при укладывании на высоту до 16 м не наблюдается.
Грузоподъемность кранов на складе 5 т, и они обслуживают два пролета. Обычно одновременно работают два захвата: один на загрузке (пропускает цепи между кипами, освобождает защелку), другой — на транспортировании.
Продолжительность установки захвата на пакете одним рабочим 40—50 с. Для погрузки такого пакета в транспортные средства подкрановые пути выводят из склада на эстакаду на длину до 25 м. Кипы погружают в железнодорожные вагоны с откидной крышей.
Рекламные предложения:
Главная → Справочник → Статьи → Форум
Механизация земляных работ
Механизация строительства
Механизация дорожных работ
Автоматизация строительства
→ Бетонные работы
→ Мини-тракторы
 Разделы
Разделы
Строительные машины и оборудование
→ Для специальных земляных работ
→ Дорожно-строительные машины
→ Строительное оборудование
→ Асфальтоукладчики и катки
→ Большегрузные машины
→ Строительные машины, часть 2,
→ Дорожные машины, часть 2
→ Ремонтные машины
→ Ковшовые машины
→ Автогрейдеры
→ Экскаваторы
→ Бульдозеры
→ Скреперы
→ Грейдеры
Эксплуатация строительных машин
→ Эксплуатация средств механизации
→ Эксплуатация погрузочных машин
→ Эксплуатация паровых машин
→ Эксплуатация экскаваторов
→ Эксплуатация подъемников
→ Эксплуатация кранов перегружателей
→ Эксплуатация кузовов машин
→ Крановщикам и стропальщикам
Ремонт строительных машин
Ремонт дорожных машин
Ремонт лесозаготовительных машин
Ремонт автомобилей КАмаЗ
Техническое обслуживание автомобилей
Очистка автомобилей при ремонте
Материалы и шины
Остались вопросы по теме:
"Специализированные захваты для рулонов и кип"
— воспользуйтесь поиском.
→ Машины городского хозяйства
→ Естественная история машин
→ Транспортная психология
→ Пожарные автомобили
→ Автомобили-рефрижераторы
→ Монтаж и эксплуатация лифтов
→ Тракторы