Строй-Техника.ру
Строительные машины и оборудование, справочник
Все электрокары снабжаются электродвигателями постоянного тока.
Действие электродвигателя постоянного тока состоит в следующем. В магнитном поле (здесь оно создается постоянным магнитом) помещается обмотка из медной изолированной проволоки
(на фигуре она представлена в виде рамки). По обмотке пропускается ток от какого-либо источника тока. Вокруг проводника, по которому протекает электрический ток, образуется магнитное поле. Так как кроме магнитного поля, создаваемого током, протекающим по проводнику, имеется еще магнитное поле постоянного магнита, то в результате их взаимодействия возникает сила, стремящаяся повернуть проводник в сторону, показанную стрелкой наверху. Направление действия этой силы (а следовательно, и направление вращения) определяется по правилу левой руки, которое гласит: если левую руку расположить так, чтобы магнитные силовые линии входили в ладонь (считается, что магнитные силовые линии выходят из северного полюса магнита и входят в южный), а пальцы расположить по направлению движения тока в проводнике (считается, что ток идет от положительного полюса к отрицательному), то отставленный в сторону большой палец покажет направление движения проводника (в нашем случае — против часовой стрелки).
Рекламные предложения на основе ваших интересов:
Дополнительные материалы по теме:
Коллектор предназначен для поддержания неизменным направления тока в обмотке электродвигателя. Показанный на фигуре коллектор состоит из двух медных полуцилиндров, изолированных друг от друга и соприкасающихся со щетками.
Как видно из рис. 44, рамка будет поворачиваться против часовой стрелки (рис. 44, а) до тех пор, пока она не займет положение, показанное на рис. 44, б. В этом случае ток в ее цепи прекратится, но онa по инерции будет поворачиваться до тех пор, пока не займет положение, показанное на рис. 44, в.
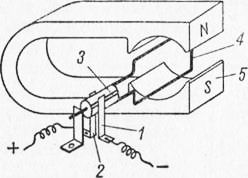
Рис. 43. Схема устройства электродвигателя постоянного тока:
1 и 2 — щетки; 3 — коллектор; 4 — рамка из медной проволоки; 5 — постоянный магнит.
В этом положении ток по рамке снова пойдет в прежнем направлении, т. е. он опять будет создавать магнитное поле, стремящееся во взаимодействии с полем магнита повернуть рамку против часовой стрелки.
Если бы коллектора не было, то рамка, придя в положение, показанное на рис. 44, в, дальше бы не поворачивалась, так как в этом положении согласно тому же правилу левой руки сила взаимодействия магнитных полей рамки и магнита стремилась бы возвратить рамку в положение рис. 44, б.
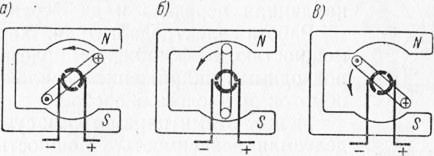
Рис. 44. Различные положения рамки электродвигателя (рис. 42) в магнитном поле (знак + означает, что ток идет от наблюдателя; знак — означает, что ток идет к наблюдателю).
На практике неподвижная часть электродвигателя постоянного тока, называемая станиной или статором, выполняется из стали или чугуна в виде кольцевого ярма, на котором крепятся стальные полюсные башмаки с обмотками. Эти обмотки служат для создания постоянного магнитного поля. Подвижная часть (якорь) устроена следующим образом: на стальную ось надет плотно стягиваемый набор стальных дисков с пазами для укладки обмотки и коллектор-цилиндр с укрепленными на нем медными пластинами, изолированными друг от друга слюдой.
В пазы якоря укладывается обмотка из медной изолированной проволоки, выводы которой припаиваются к коллекторным пластинам.
Якорь вставляется в статор, который закрывается крышками с подшипниками для оси якоря. Для подвода тока к якорю электродвигатель снабжается траверсой со щетками, которые чаще всего выполняются из особо приготовленного угля.
Машины постоянного тока по способу подключения обмотки возбуждения делятся на машины с последовательным, параллельным и смешанным возбуждением. Каждый из этих видов машин имеет свои преимущества и недостатки.
На электрокарах применяются электродвигатели только с последовательным возбуждением (сериесные двигатели), имеющие следующее преимущество: электродвигатель имеет большой пусковой момент, т. е. при трогании с места развивает значительное усилие, что очень ценно при перевозке грузов.
Недостатком электродвигателя с последовательным возбуждением является его «мягкая» характеристика, означающая, что с повышением нагрузки скорость вращения двигателя сильно снижается.
Схема устройства тягового электродвигателя показана на рис. 45, Как видно из фигуры, обмотка возбуждения соединяется последовательно с якорем. Для изменения направления вращения надо поменять местами или выводы обмотки возбуждения, или провода, идущие к щеткам якоря. Большинство электрокаров имеет один тяговый двигатель. Электрокары «Ящерица» и электрокары ЭК-1 имеют по два двигателя.
к Применение двух электродвигателей дает возможность упростить конструкцию электрокара, так как в данном случае не требуются карданная передача и дифференциал.
Работа электродвигателя характеризуется мощностью, коэффициентом- полезного действия, подводимым напряжением, силой тока в цепи обмоток и числом оборотов.
Если потребляемую мощность умножить на к. п. д., то мы получим мощность на валу двигателя. Часто на практике мощность на валу двигателя выражается через вращающий момент, т. е. произведение усилия на валу двигателя на радиус вала. Вращающий момент выражается в килограммометрах (кГм).
Величина вращающего момента на валу двигателя постоянного тока пропорциональна силе тока в обмотке якоря.
Число оборотов двигателя постоянного тока обратно пропорционально величине магнитного потока статора. Из сказанного следует, что величина вращающего момента на валу двигателя будет тем больше, чем больший ток будет проходить по обмотке якоря, а число оборотов будет тем меньше, чем больший ток будет подаваться в обмотку возбуждения.
У двигателей с последовательным возбуждением, применяемых на электрокарах, вращающий момент на валу пропорционален квадрату силы тока в обмотке якоря, т. е. при увеличении силы тока в обмотке якоря в два раза момент по валу возрастает в четыре раза. Это очень важное преимущество рассматриваемого двигателя. Кроме того, обмотка возбуждения включается последовательно с обмоткой якоря. По ней, следовательно, будет протекать ток такой же силы, как и в обмотке якоря. При увеличении тока в обмотке якоря увеличится магнитный поток обмотки возбуждения, а это вызовет уменьшение числа оборотов. Из сказанного можно сделать следующие выводы.
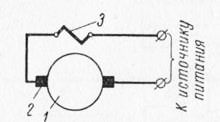
Рис. 45. Электрическая схема тягового электродвигателя с последовательным возбуждением:
1 — якорь; 2 — щетки; 3—обмотка возбуждения.
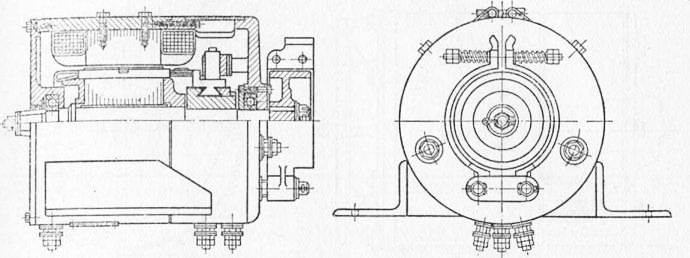
Рис. 46. Общий вид двигателя МТ-1 электрокара ЭК-2.
1. Тяговый электродвигатель может развивать очень большие усилия на валу при малом числе оборотов.
2. При уменьшении силы тока в обмотке якоря резко падает усилие на валу двигателя, а число оборотов повышается.
У включенного, но не нагруженного двигателя с последовательным возбуждением сила тока в обмотках якоря и возбуждения будет очень мала, а число оборотов может достигнуть недопустимо большой величины. Поэтому всякое опробование двигателей, например после ремонта, на холостом ходу запрещается, так как двигатель может «разнести», т. е. под влиянием центробежных усилий разорвутся коллектор и обмотки.
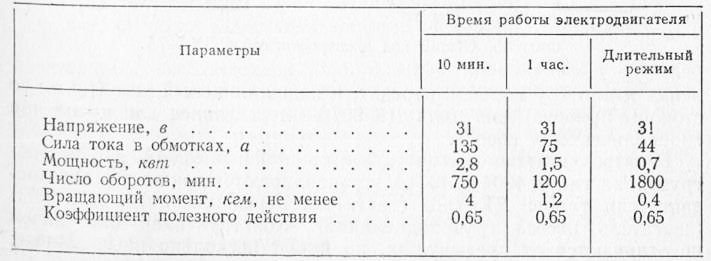
Электродвигатель электрокара типа ЭК-2. На электрокаре ЭК-2 установлен один электродвигатель с последовательным возбуждением типа МТ-1, приводящий в движение оба ведущих колеса.
Технические данные его приведены в табле 3, а устройство — на рис. 46.
Таблица 3
Барабанные контроллеры применяются на электрокарах «Ящерица» (рис. 50).
Внутри кожуха контроллера находится вал с укрепленными на нем (на изолирующих прокладках) литыми латунными сегментами.
При вращении вала сегменты в определенной последовательности замыкают неподвижные контакты (пальцы), и таким образом осуществляются различные переключения в цепи двигателей.
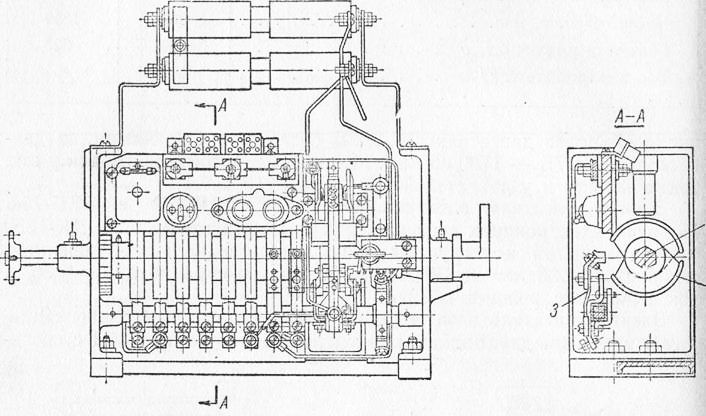
Рис. 50. Устройство барабанного контроллера электрокара «Ящерица».
Недостатком барабанного контроллера является трудность замены изношенных (вследствие подгорания контактов и трения) сегментов барабана, а изготовление новых сегментов довольно сложно. Механическое же их устройство значительно проще устройства кулачковых контроллеров.
Кулачковые контроллеры применяются на автопогрузчиках типа 02 и 04 и электрокарах ЭК-2.
Они отличаются оу барабанных тем, что у них на вал контроллера насаживаются профилированные кулачки, которые при вращении вала замыкают или размыкают в определенной последовательности расположенные против них контакты, одни из которых являются подвижными, а другие — неподвижными. Преимуществом этих контроллеров является то, что замена контактов не требует снятия вала.
На рис. 51 показан общий вид кулачкового контроллера автопогрузчиков типа 02 и 04. Контроллер имеет два вала с кулачками — главный и реверсивный. Главный вал приводится в движение от рукоятки и управляет включением и выключением пяти кулачковых контакторов. Рукоятка имеет пять позиций.
На рис. 52 представлена электрическая схема автопогрузчика.
Контактор контроллера 1 имеет дугогасительное устройство, состоящее из асбоцементной плиты с постоянным магнитом, северный полюс которого для правильного направления выдувания дуги обращен в сторону рукоятки.
Контакторы 2 и 3 также имеют постоянные магниты для дугогашения, но в сторону рукоятки обращены их южные полюсы (южные полюсы всех магнитов окрашены в красный цвет). Реверсивная рукоятка переключает двухполюсный контактор Р, изменяющий направление тока в якоре, за счет чего и получается изменение направления движения. Главный и реверсивный валы механически сблокированы между собой таким образом, что изменение
направления тока в якоре (реверсирование) можно производить только при нулевом положении главного барабана, чем исключается возможность реверсирования под током, на что контактор не рассчитан.
Работа контроллера состоит в следующем. В положении замыкается контактор, вследствие чего ток, пройдя от батареи через пусковые сопротивления Ri и R2, направится по цепи: обмотка статора / — обмотка статора II — якорь Яда — батарея. Якорь начнет вращаться в ту или иную сторону, определяемую положением контактора реверсирования Р.
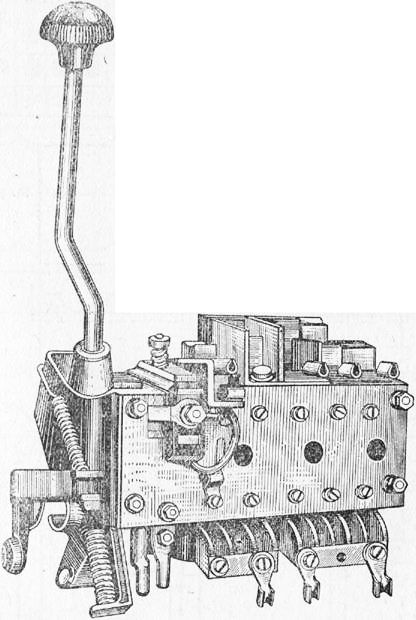
Рис. 51. Общий вид контроллера автопогрузчиков типов 02 и 04.
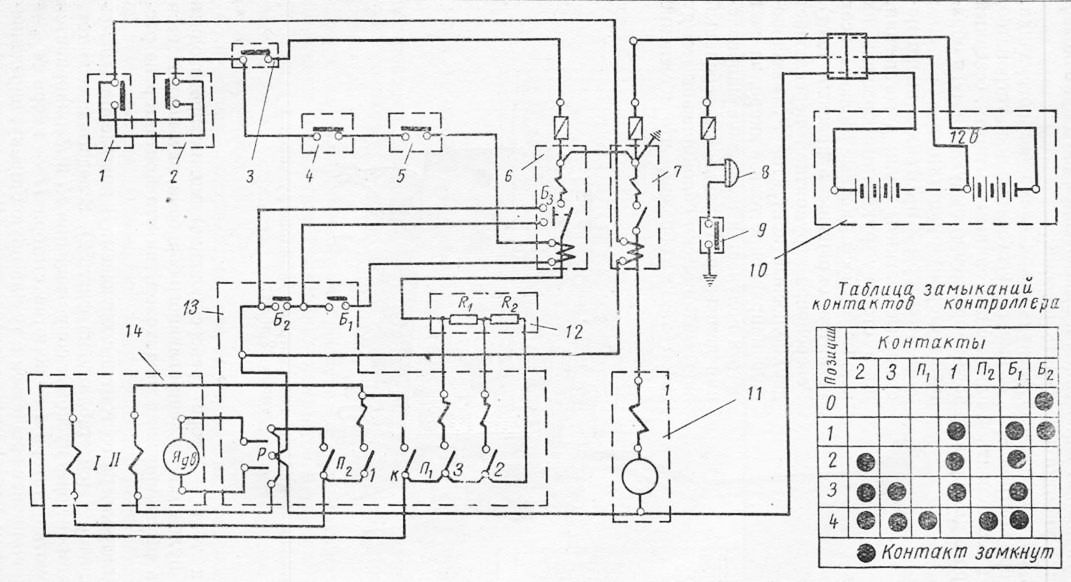
Рис. 52. Электрическая схема автопогрузчиков типов 02 и 04:
1 — включатель подъема; 2 — включатель наклона; 3 — выключатель цепи управления; 4 — блокировка тормоза; 5 — блокировка сиденья; 6 — контактор движения; 7 — контактор подъема; 8 — сигнал; 9 — кнопка сигнала; 10 — аккумуляторная батарея; 11 — электродвигатель подъема и наклона; 12 — пусковое сопротивление; 13 — контроллер; 14 —электродвигатель движения.
В положении будут замкнуты контакторы, при этом сопротивление Rо закорачивается и якорь развивает большую мощность.
В положении дополнительно замыкается контактор, вследствие чего закорачивается и сопротивление Ri и якорь развивает еще боль-шую мощность.
В положении при замкнутых контактах замыкается контактор П\, а контактор 1 размыкается. При этом обмотки / и II статора включаются параллельно и двигатель развивает наибольшую мощность.

Рис. 53. Электрическая схема электрокара «Ящерица» (упрощенная).
Схема электрических соединений электродвигателей электрокара «Ящерица» при различных положениях контроллера показана на рис. 53.
Якори обоих электродвигателей Mi и М2 всегда соединены между собой последовательно, так же последовательно соединены и их обмотки возбуждения. Все переключения в схеме производятся с помощью барабанного контроллера, о котором говорилось выше.
Как видно из рис. 53, в положении контроллера 1 оба двигателя соединяются последовательно и подключаются к источнику тока Через сопротивление R.
В положении контроллера 2 оба двигателя остаются соединенными последовательно, вследствие чего момент на валу двигателей возрастает.
В положении 3 обмотки возбуждения электродвигателей включаются параллельно, и момент на их валах достигает максимального значения.
В положении «назад» при помощи контроллера меняются местами провода, идущие к якорям электродвигателей, вследствие чего направление их вращения меняется на обратное.
В положениях торможения оба электродвигателя отключаются от батареи и подключаются к сопротивлению R.
Возникающая вследствие вращения двигателей по инерции электродвижущая сила создает в сопротивлении R ток. Таким образом, механическая энергия движения переходит сначала в электрическую, а затем в тепловую, и скорость электрокара падает. Чем выше скорость, тем резче будет торможение. При движении с малой скоростью электрическое торможение будет очень незначительным; при движении под уклон электрокар не остановится, а будет двигаться с небольшой скоростью. В этом случае торможение производится механическим тормозом.
На электрокаре ЭК-2 установлен контроллер кулачкового типа, у которого контакты замыкаются механически при помощи кулачков, насаженных на вал контроллера.
Во время вращения вала контроллера кулачки также вращаются. При этом кулачок, нажимая на хвостовую часть подвижного контакта, прижимает его к неподвижному или, наоборот, отжимает его. Рабочие поверхности контактов всегда должны быть чистыми и гладкими, иначе контакты будут обгорать и потребуют замены.
Контроллер имеет семь положений: одно нейтральное, когда электродвигатель не включен, три положения для движения вперед и три для движения назад.
Контроллер состоит из следующих основных частей:
девяти включателей, смонтированных на панели из текстолита или дельта-древесины; десяти кулачков (девяти переключающих и одного фиксирующего), собранных на одном валу, связанном тягой с рычагом управления контроллером; рычага управления контроллером, при повороте которого в одно из семи положений поворачивается вал с кулачками (кулачки, упираясь в ролики включателей, устанавливают их в требуемое положение); удерживающего электромагнита, предназначенного для удержания шестого включателя во включенном состоянии при движении электрокара (работа шестого включателя поясняется ниже в описании блокировок).
Рекламные предложения:
Главная → Справочник → Статьи → Форум
Механизация земляных работ
Механизация строительства
Механизация дорожных работ
Автоматизация строительства
→ Бетонные работы
→ Мини-тракторы
 Разделы
Разделы
Строительные машины и оборудование
→ Для специальных земляных работ
→ Дорожно-строительные машины
→ Строительное оборудование
→ Асфальтоукладчики и катки
→ Большегрузные машины
→ Строительные машины, часть 2,
→ Дорожные машины, часть 2
→ Ремонтные машины
→ Ковшовые машины
→ Автогрейдеры
→ Экскаваторы
→ Бульдозеры
→ Скреперы
→ Грейдеры
Эксплуатация строительных машин
→ Эксплуатация средств механизации
→ Эксплуатация погрузочных машин
→ Эксплуатация паровых машин
→ Эксплуатация экскаваторов
→ Эксплуатация подъемников
→ Эксплуатация кранов перегружателей
→ Эксплуатация кузовов машин
→ Крановщикам и стропальщикам
Ремонт строительных машин
Ремонт дорожных машин
Ремонт лесозаготовительных машин
Ремонт автомобилей КАмаЗ
Техническое обслуживание автомобилей
Очистка автомобилей при ремонте
Материалы и шины
Остались вопросы по теме:
"Тяговые электродвигатели"
— воспользуйтесь поиском.
→ Машины городского хозяйства
→ Естественная история машин
→ Транспортная психология
→ Пожарные автомобили
→ Автомобили-рефрижераторы
→ Монтаж и эксплуатация лифтов
→ Тракторы