Строй-Техника.ру
Строительные машины и оборудование, справочник
Простейшая схема управления короткозамкнутым нереверсивным электродвигателем представлена на рис. 1
При нажатии кнопки «Пуск» (SA) катушка контактора КМ обтекается током. Сердечник контактора КМ втягивается, вследствие чего замыкается цепь главного тока главными контактами контактора, и двигатель начинает вращаться. После того как кнопка SA отпущена, питание катушки поддерживается через блок-контакт контактора КМ, включенный параллельно этой кнопке. В случае снятия напряжения катушка контактора не будет обтекаться током, контактор КМ разомкнет свои контакты и двигатель отключится. При восстановлении напряжения двигатель не включится до тех пор, пока не будет нажата кнопка SA, Двигатель останавливают, нажав кнопку «Стоп» (SB), вследствие чего размыкается цепь питания катушки контактора. При перегрузке двигателя эта цепь также размыкается за счет размыкания контакторов тепловых реле КК, включенных в цепь катушки контактора КМ. Как А и с было указано выше, на крановых двигателях должно быть предусмотрено реверсирование, т. е. изменение направления вращения.
Рекламные предложения на основе ваших интересов:
Дополнительные материалы по теме:
Рис. 1. Схема нереверсивного контакторного управления
На рис. 2 приведена схема реверсивного управления электродвигателем с короткозамкнутым ротором.
Рис. 2. Схема реверсивного управления
В принципе эта схема мало отличается от схемы, представленной на рис 1. Здесь имеются два контактора: КМ1 и КМ.2, которые управляются соответствующими кнопками SA1 и SA2. Для предотвращения одновременного включения контакторов, КМ1 и Ш2, что привело бы к короткому замыканию в силовой цепи, в таких схемах обязательно предусматривают блокировку контактов КМ1 и КМ2. В данном случае она осуществляется включением блок-контактов контакторов КМ1 и КМ2 в цепи их катушек.
При включенном контакторе КМ 1 ток в его катушку идет через замкнутый блок-контакт контактора К.М2. Если теперь нажать кнопку SA2, чтобы включить контактор КМ2, то ток по катушке КМ2 не пойдет, так как блок-контакт КМ1 в цепи его катушки разомкнут контактом КМ1. При перегрузке двигателя сработает тепловое реле КК и разомкнет свои контакты, которые разомкнут цепь катушки контактора.
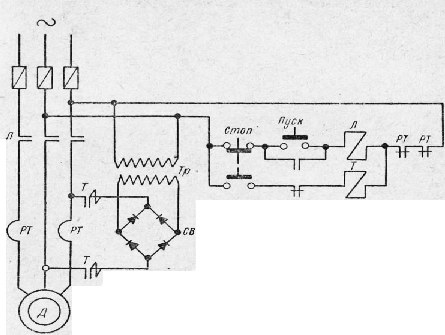
Схема, показанная на рис. 3, относится к нереверсивному управлению асинхронным короткозамкнутым двигателем с так называемым динамическим торможением, которое заключается в том, что при отключении двигателя в обмотку статора подается постоянный ток, вследствие чего двигатель затормаживается. В остальном схема не отличается от вышеприведенных. Источником постоянного тока является сухой (селеновый) выпрямитель UZ с трансформатором Т. При нажатии кнопки SB1 отключается контактор КМ, а замыкающий контакт кнопки SB1 одновременно включает питание катушки тормозного контактора КМ1, который своими контактами замыкает цепь постоянного тока от выпрямителя.
Рис. 3. Схема управления асинхронным двигателем с динамическим торможением
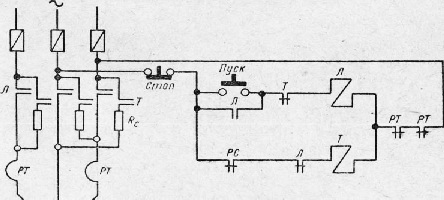
На рис. 4 дана схема управления нереверсивным короткозамкнутым двигателем в случае торможения про-тивовключением. Работа схемы при пуске ничем не отличается от предыдущих.
При торможении схема работает следующим образом. После нажатия на кнопку SB1 катушка контактора КМ отключается, он срабатывает и отключает двигатель от сети. Одновременно с этим блок-контакты контактора КМ в цепи катушки контактора КМ1 замыкаются. Поскольку двигатель вращается и контакты реле скорости К1 замкнуты, катушка контактора КМ1 оказывается включенной, контактор срабатывает и включает обмотку статора в сеть переменного тока таким образом, что поле статора вращается в сторону, противоположную направлению вращения ротора. Двигатель начинает работать в режиме противовключения и быстро останавливается. Для ограничения тока при торможении служат резисторы R в цепи статора двигателя.
Рис. 4. Схема управления асинхронным двигателем с торможением противовключением
Контакты реле К1 размыкаются при частоте вращения двигателя, близкой к нулю; при этом катушка контактора КМ1 обесточивается и двигатель отключается от сети. Контакторы КМ и КМ1 также сблокированы для предотвращения их одновременного включения.
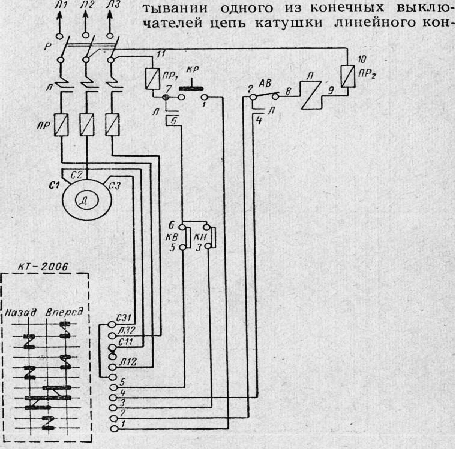
Простейшая схема контроллерного управления ко-роткозамкнутым двигателем приведена на рис. 6.2. Здесь взамен контакторов КМ и КМ1 применен контроллер КТ-2006. Перед пуском двигателя включается рубильник Q, а контроллер устанавливается в нулевое положение. Затем кнопкой SB включается линейный контактор КМ (по цепи 11—7—1—2—8—9—10). Если один из конечных выключателей разомкнут (кран находится в крайнем положении), то движение возможно лишь в противоположном направлении. Если оба конечных выключателя SQ1 и SQ2 замкнуты, то кран может двигаться в обоих направлениях.
При повороте контроллера «Вперед» посредством сегментов замыкаются пальцы С31 и Л32, СП и Л12; все три фазы через пальцы контроллера подключаются к статору и двигатель вращается «Вперед». При повороте контроллера в противоположном направлении замыкаются пальцы СП и Л32, С31 и Л12, т. е. меняется чередование фаз, и двигатель вращается в обратном направлении.
Двигатель отключается поворотом контроллера в нулевое положение. Двигатель отключится также при наезде крана или тележки на один из конечных выключателей или при срабатывании аварийного выключателя SA.
Контроллеры типа КТ — крановые трехфазные применяют для трехфазных двигателей с фазовым ротором.
Контроллеры типа КТП по электрической схеме схожи с контроллерами типа КТ, но отличаются от них тем, что цепь статора двигателя переключается двумя магнитными контакторами, а не пальцами и сегментами контроллера. | V Кулачковые контроллеры типов НТ-51, НТ-101 и НТ-151 служат для коммутирования статорных и роторных цепей трехфазных асинхронных электродвигателей с контактными кольцами и имеют одинаковые схемы замыканий для обоих направлений вращения.
В первом положении барабана контроллера обмотка статора включается в сеть, при этом в цепь ротора полностью введен пусковой резистор. На последующих ступенях барабана последовательно замыкаются ступени пускового резистора. Реверсирование электродвигателя достигается переключением обмоток статора при повороте барабана в сторону обратного хода.
Торможение и остановка двигателя после его отключения от сети обычно осуществляются тормозом с приводом от электромагнита, включенного на зажимы статора электродвигателя.
Контакты цепи управления в контроллере предназначены для нулевой блокировки и конечной защиты. Контроллер типа НТ-63 применяют для коммутирования ста-торной цепи трехфазных асинхронных электродвигателей с короткозамкнутым ротором. Он служит для управления электродвигателями механизмов, для которых не требуется регулировать частоту вращения и момент привода. Контроллер имеет по одному рабочему положению барабана для каждого из направлений движения механизма, при которых обмотка статора непосредственно включается в сеть. Включение тормозного электромагнита, конечная защита и нулевая блокировка осуществляются аналогично схеме контроллера НТ-51.
Контроллеры типов НТ-52 и НТ-102 применяют в тех же случаях, что и контроллеры НТ-51 и НТ-101, но для одновременного управления двумя механически связанными трехфазными асинхронными электродвигателями с контактными кольцами. При этом контроллеры используют только для коммутирования роторных цепей и цепей управления.
Цепи статора, в отличие от контроллеров НТ-51 и НТ-101, коммутируются электромагнитными контакторами.
Контроллер типа НТ-54 применяют для управления электродвигателями механизмов подъема в тех случаях, когда предъявляются особенно строгие требования к регулированию скорости на спуске. В схеме предусмотрена возможность получения пониженной скорости на спуске путем однофазного включения ротора в сеть при первом положении контроллера. Следует иметь в виду, что при однофазном включении в обмотках статора протекает повышенный ток, вызывающий перегрев электродвигателя; поэтому этот контроллер можно применять при высоте подъема, не превышающей 5 м.
В остальном схема аналогична схеме контроллера НТ-51 за исключением того, что конечная защита предусмотрена только в сторону подъема.
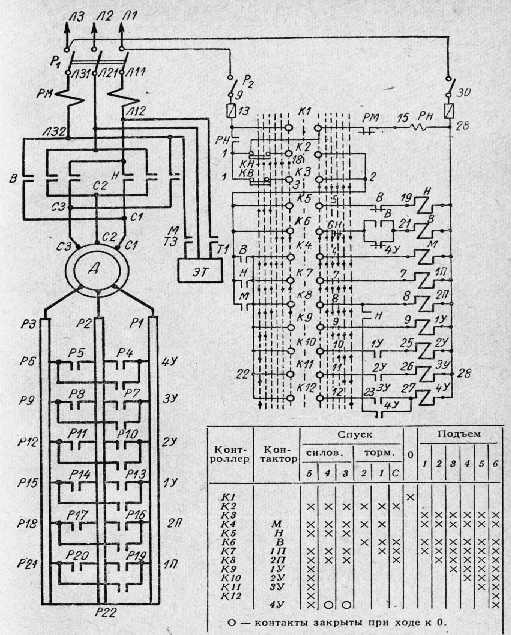
Рис. 5. Схема контроллера НТ-53
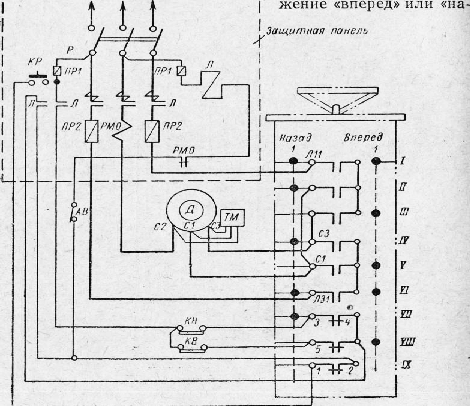
Схема управления двигателем с короткозамкнутым ротором при помощи кулачкового контроллера типа НТ-53 представлена на рис. 6.8. Вся аппаратура — линейный контактор КМ, максимальное токовое реле КА, кнопка SB2, рубильник Q и плавкие предохранители FU1 и FU2 — собрана на общей защитной панели. В отличие от предыдущей схемы (применяемой, как правило, для тихоходных механизмов), здесь предусмотрен тормозной электромагнит YB, подключенный параллельно двигателю, работа которого описана ранее.
Пуск двигателя может быть осуществлен лишь при установке контроллера в нулевое положение и включенном рубильнике Q. Нажатием кнопки пуска SB2 включается линейный контактор КМ и поворотом контроллера «Вперед» или «Назад» обеспечивается движение механизма в нужном направлении.
При ходе «Вперед» замыкаются контакты I и III (зажим двигателя С1 подключается к зажиму Л31), при включенном контакторе провод В наглухо присоединен к зажиму двигателя С2.
При ходе «Назад» замыкаются контакты I я II (зажим С1 подключается к зажиму ЛИ) и контакты IV и VI (зажим СЗ подключается к контакту Л31). При срабатывании одного из конечных выключателей цепь линейного контактора разрывается и движение возможно лишь в противоположном направлении.
При выводе контроллера из нулевого положения размыкающий контакт /—2 размыкается, но обмотка контактора КМ питается через его блок-контакты. При срабатывании какой-либо защиты отключается контактор КМ (например, при понижении напряжения, разрыве цепи одного из конечных выключателей). Дальнейшая работа схемы возможна лишь после возврата контроллера в нулевое положение, т. е. имеет место нулевая блокировка.
На рис. 6 представлена схема управления электродвигателем с фазовым ротором при помощи барабанного контроллера КТ-2005. Подготовка к пуску (включая установку контроллера в нулевое положение) ничем не отличается от вышеописанной. В этой симметричной реверсивной схеме предусмотрены максимальная защита с помощью реле КА и нулевая блокировка посредством пальцев и сегментов контроллера XI.
В цепи управления включены конечные выключатели SA1 и SA2. Пальцы и сегменты контроллера IX, X и XI предназначены для переключения в цепи тока управления, пальцы и сегменты V—VIII — для управления сопротивлениями в цепи ротора двигателя, а верхние пальцы /—IV — для переключения цепи статора двигателя.
Из схемы видно, что сопротивления в цепи ротора выводятся неравномерно; это позволяет сократить число пальцев и сегментов контроллера и тем самым уменьшить высоту и массу контроллера.
В данной схеме в отличие от предыдущей вместо плавких предохранителей предусмотрено максимальное токовое реле КА, отключающее двигатель при перегрузках. Схема обеспечивает защиту от понижения и исчезновения напряжения, блокировку и ограничение хода механизма. Линейный контактор КМ, кнопка SB2 и двухполюсное максимальное токовое реле входят в комплект защитной панели.
Принцип действия защитной панели типа В для трех двигателей (подъема, моста и тележки) ясен из схемы-развертки, приведенной на рис. 6.10. Катушка линейного контактора КМ может получить питание при включенном рубильнике Q после нажатия кнопки пуска SB2 при условии, что нулевые контакты всех трех контроллеров П, Т и М замкнуты (нулевое положение), закрыт контакт люка для выхода на настил крана SF1 и замкнут аварийный выключатель SF. После включения контактора КМ кнопка SB2 может быть отпущена и питание его будет производиться через блок-контакты КМ, конечные выключатели и пальцы контроллеров.
Рис. 6. Схема контроллера КТ-2005
Рис. 7. Схема защитной панели типа В
После главных (силовых) контактов контактора КМ ток подходит к электродвигателям соответственно через отдельные максимальные реле подъемного механизма, механизма тележки и механизма моста. Все эти реле двухполюсные. Третья фаза проходит через общее для всех двигателей реле. При перегрузке электродвигателей действуют соответственно реле подъемного механизма, механизма тележки и механизма моста. Общее реле защищает все двигатели от коротких замыканий. Размыкающие контакты всех четырех реле включены в цепь катушки линейного контактора КМ. (На рис. 6.10 обмотки указанных реле не показаны.) При перегрузках контакт одного из реле размыкается и линейный контактор отключает схему крана от сети.
При включенном контакторе КМ прохождение тока, питающего катушку КМ, зависит от положения контроллеров («Вперед» или «Назад», «Подъем» или «Спуск»). На схеме указаны положения контроллеров и направление движения механизмов. Как уже было указано, при достижении механизмом одного из крайних предельных положений разомкнётся соответствующий конечный выключатель и отключит всю схему. Дальнейшая работа возможна лишь после приведения всех контроллеров в нулевое положение и при движении в направлении, противоположном тому, при котором сработал конечный выключатель.
Например, если сработает конечный выключатель хода тележки «Вперед», то движение тележки «Вперед» станет возможным, когда тележка отойдет назад и освободит этот конечный выключатель, после чего он под действием пружины вновь замкнется.
Конечные выключатели моста и тележки ограничивают ход в обе стороны движения, т. е. «Вперед» и «Назад». У механизмов подъема ограничивается лишь верхний предел движения.
Рис. 8. Схема контроллера НТ-102
Часто в крановых схемах возникает необходимость одновременно управлять двумя электродвигателями (раздельный привод моста крана). На рис. 8 приведена схема одновременного управления двумя двигателями с фазовым ротором при помощи барабанного контроллера типа НТ-102. В отличие от этой схемы кнопки SA1 и SA2 в схеме на рис. 8 заменены контактами контроллера (в положении «Вперед» замыкаются контакты контроллера, включающие питание катушки контактора КМ1, а в положении «Назад» — контакты контроллера, включающие питание катушки контактора КМ2), В остальном эта схема аналогична схеме на рис. 6. Чтобы уяснить принцип работы магнитного контроллера, рассмотрим схему управления электродвигателем с фазовым ротором при помощи магнитного контроллера типа Т, представленную на рис. 6.12 для движения «Вперед». При движении «Назад» работа схемы аналогична, только вместо контактора КМ1 замкнется контактор КМ2.
Рис. 9. Схема магнитного контроллера типа Т
При включенном рубильнике Q2 тока управления и нулевом положении командоконтроллера (замкнут размыкающий контакт К2) катушка блокировочного реле KB получает питание, реле сработает и замкнет свой контакт, через который станет питаться вся схема управления, после того как командоконтроллер будет выведен из нулевого положения. Таким образом, пуск возможен лишь при нулевом положении командоконтроллера (нулевая блокировка).
В первом положении «Вперед» при условии, что конечный выключатель SQ1 не разомкнут, через контакт командоконтроллера К4 и размыкающий блок-контакт контроллера КМ2 получает питание катушка контактора КМ1 и он срабатывает; размыкающий блок-контакт КМ2 в цепи катушки контактора КМ1 так же, как и размыкающий блок-контакт КМ1 в цепи катушки контактора КМ2, служит для того, чтобы включить первый можно было лишь при разомкнутом положении второго (взаимно запрещающая блокировка). Статор двигателя М подключается к сети одновременно с тормозным магнитом YB, открывающим тормоз. Двигатель подключается к сети с полностью введенным роторным сопротивлением.
Во втором положении «Вперед» через блок-контакт контактора КМ1 и контакт командоконтроллера Кб включается катушка контактора торможения КМЗ, контакты которого шунтируют тормозную часть роторного сопротивления.
В третьем положении «Вперед» через контакт К7 командоконтроллера и блок-контакт включенного контактора торможения КМЗ получает питание катушка контактора ускорения КМ4 и шунтируется следующая часть пускового сопротивления.
В следующих положениях «Вперед» последовательно включаются контакторы КМ5—КМ7, шунтирующие соответствующие ступени резистора. Как видно из схемы, цепь питания катушки каждого последующего контактора проходит через блок-контакты предыдущего контактора, чем обеспечивается необходимая последовательность их включения.
В случае перегрузки или резкого снижения напряжения отпадает якорь блокировочного реле KB и сразу же отключаются контактор направления КМ1 (или КМ2) и все роторные контакторы, так как цепь питания их катушек проходит через блок-контакты КВ.
При переходе механизма в крайнее положение срабатывает (размыкается) соответствующий конечный выключатель, отключая контактор управления, а за ним и все роторные контакторы.
Контроллеры типа Т имеют реверсивную симметричную схему, допускающую торможение противовключе-нием и регулирование частоты вращения сопротивлениями в цепи ротора. Магнитные контроллеры типа Т применяют для управления трехфазными асинхронными электродвигателями, обслуживающими механизмы горизонтального передвижения.
Для управления трехфазными асинхронными двигателями подъема служат магнитные контроллеры типа ТС с реверсивной несимметричной схемой, при которой в первых положениях спуска электродвигатель остается включенным в сторону подъема, благодаря чему обеспечиваются малые посадочные скорости при спуске тяжелых грузов.
В этих положениях спуска двигатель согласно схеме включен на подъем, но под действием груза крюк движется вниз — происходит спуск. Тормозной момент двигателя не дает грузу падать.
Рис. 10. Схема управления с магнитным контроллером типа ТС
Схема магнитного контроллера типа ТС при подъеме груза отличается от схемы рассмотренного выше контроллера типа Т только наличием специального контактора КМ, управляющего тормозным магнитом.
При опускании грузов двигатель, управляемый контроллером типа ТС, может работать в режимах тормозного и силового спусков. Для получения малых скоростей опускания тяжелых грузов двигатель переводится в тормозной режим противовключения — тормозной спуск. Этому режиму соответствуют три первых положения ко-мандоконтроллера: при спуске С, первое и второе.
В режиме силового спуска опускаются легкие грузы, ему соответствуют три положения командоконтроллера:-третье, четвертое и пятое. В этих положениях командоконтроллера в генераторном режиме осуществляется тормозной спуск тяжелых грузов.
В положении С рукоятки командоконтроллера включен контактор КМ1, в роторную цепь введены четыре ступени сопротивления ускорения, контактор КМ отключен.
Таким образом, двигатель включен для работы на подъем, однако он заторможен механическим тормозом. Положение С используется для операций с подвешенным грузом. Переход в первое и второе положения тормозного спуска соответственно сопровождается отключением контакторов КМ4 и КМЗ, которые вводят в роторную цепь дополнительные ступени резистора. Механическое торможение в этих положениях командоконтроллера отсутствует, так как контактор КМ включен.
После отключения контактора КМ4 двигатель будет работать, опуская груз в режиме противовключения. Торможение используется при значительных грузах, малый груз не способен преодолевать работу двигателя на подъем, и вместо спуска может быть подъем.
В третьем положении командоконтроллера при спуске груза отключается контактор КМ1 и включается контактор КМ2. В роторную цепь двигателя теперь включены все ступени резистора ускорения, а ступени противовключения выведены. При переводе командоконтроллера в четвертое и пятое положения из роторной цепи выводятся дополнительные сопротивления.
В пятом положении двигатель работает с постоянно включенным малым сопротивлением в цепи ротора. Во избежание увеличения частоты вращения при переводе командоконтроллера из пятого положения в нулевое контактор КМ8 остается включенным через замыкающий контакт КМ2. В схеме также предусмотрена блокировка с помощью размыкающего контакта КМ8, исключающая включение контактора КМ1 до отключения контактора КМ8 при переходе от силового спуска к тормозному.
При очень напряженных режимах, когда магнитные системы контакторов и тормозов переменного тока не выдерживают большого количества включений из-за нагрева катушек от пусковых токов и частых ударов, применяют магнитные контроллеры с цепями управления на постоянном токе. В этих контроллерах силовые цепи также питаются переменным током, как и в контроллерах типа ТС. Питание цепей управления при этом осуществляется от селенового выпрямителя, установленного в кабине крана или на его мосту.
Недостатком рассмотренной схемы, как и схемы с контроллером типа Т, является отсутствие аппаратов, которые автоматически управляли бы контакторами ускорения. Кроме того, при переводе рукоятки командокон-троллера со второго положения спуска в третье, когда производится переход с торможения противовключением на торможение с отдачей энергии в сеть (или наоборот), возможно короткое замыкание. Это происходит при реверсе двигателя, когда электрическая дуга между главными контактами контактора КМ1 еще не успела погаснуть, а контакты КМ2 уже замкнулись.
О возможности короткого замыкания в рассматриваемой схеме было известно давно, и для предотвращения его был предложен способ однофазного торможения. Положения командоконтроллера, при которых используется однофазное торможение, разделяли положение торможения противовключением и положение с отдачей энергии в сеть.
Рассмотрим схему контроллера типа КС, где использовано однофазное торможение. Эта схема предназначена для работы в тяжелом режиме, цепи управления ее и тормозной магнит питаются постоянным током.
На схеме имеются следующие обозначения: 1КМ2 и 2К.М1 — первый и второй контакторы подъема; 1КМ1 и 2КМ2 — первый и второй контакторы спуска; К А — электромагнитное реле максимального тока; 1KV и 2KV — реле напряжения, контролирующие цепи постоянного и переменного тока (первое осуществляет и нулевую блокировку); КТ1 и КТ2 — контакторы, управляющие тормозным магнитом YB; KB — блокировочное реле; KN — контактор, управляющий ступенью противовключения, вводимой во втором положении спуска; К1А—К4А —-контакторы ускорения; 1КТ и 2КТ — реле времени; RF — добавочный резистор, отключаемый при форси-ровке поля магнита; SQ — ограничитель подъема.
При повороте рукоятки командоконтроллера от нуля в первое и второе положения спуска включения двигателя не произойдет, так как контакты KB будут открыты и катушки 1КМ1 и 2КМ2 не получат питания. При установке рукоятки командоконтроллера в положение 3 закрыты контакты К2, КЗ, Кб, К7, К8, К9, КЮ.
Рис. 11. Схема контроллера типа КС
В результате этого через контакты К2 получит питание катушка 2КМ1, она сработает и замкнутся ее контакты в цепи главного тока. Контакт Кб включит ток в цепь катушки 2КМ2, которая также замкнет свои контакты. Статор двигателя будет включен по схеме однофазного торможения.
Из цепи ротора будут выведены ступени резистора, управляемые контакторами KN и К1А. Блок-контакты 2КМ2-2 включат катушку блокировочного реле KB, контакты которого вместе с блок-контактами 2К.М1-2 шунтируют блок-контакты К4А, КЗ А и К2А, осуществляющие блокировку с сопротивлениями.
При переводе рукоятки командоконтроллера в четвертое положение спуска катушка 2КМ1 будет отключена, а через закрывшиеся контакты командоконтроллера до получит питание катушка контактора 1КМ1, двигатель будет включен в сторону спуска. В этом положении происходят принудительный спуск легких грузов и торможение с отдачей энергии в сеть при спуске тяжелых грузов.
Во избежание разгона груза при переходе на торможение с отдачей энергии в сеть и значительного броска при отключении сопротивлений ускоряются процесс отключения ступеней пускового реостата и выход двигателя на характеристику, отвечающую наименьшему сопротивлению реостата. Это достигается тем, что одновременно отключаются размыкающими контактами 1КМ2-2 обе катушки реле времени 1КТ и 2КТ.
Катушка блокировочного реле KB, включенная в третьем положении, получит питание при всех положениях спуска, и ее контакты КВ2 зашунтируют контакты 2КМ2-2.
При переводе рукоятки командоконтроллера с четвертого положения в третье двигатель опять будет включен по схеме однофазного торможения. При переходе с третьего положения во второе через контакты KB получат питание сначала катушка контактора 2КМ1, а затем катушка контактора 1КМ2, двигатель реверсируется, в цепь ротора вводится все сопротивление, и если на крюке крана подвешен тяжелый груз, то происходит торможение противовключением. При переводе рукоятки командоконтроллера со второго положения в первое продолжается торможение противовключением, но в цепи ротора отключится часть сопротивления, в результате чего скорость спуска груза уменьшится.
При данной схеме легкие грузы можно спускать только в четвертом положении (силовой спуск). В третьем положении крюк неподвижен, а во втором и первом положениях вместо спуска будет подъем. В связи с этим легкие грузы необходимо спускать только в четвертом положении и перед остановкой двигателя быстро переводить рукоятку командоконтроллера в нулевое положение.
Имеется еще одна возможность избежать короткого замыкания, применив схему ТС с дуговой блокировкой (рис. 12). Особенностями этой схемы по сравнению со схемой ТС являются установка двухполюсных, а не трехполюсных контакторов направления и дополнительного трехполюсного линейного контактора, а также иное включение катушек контакторов направления КМ1 и КМ2. Рассмотрим эту схему.
Рис. 12. Схема контроллера типа ТС с дуговой блокировкой
Поставим рукоятку командоконтроллера во второе положение спуска, когда происходит торможение проти-вовключением. При переводе рукоятки командоконтроллера в третье положение контакт Кб разомкнётся, контакт К5 замкнется.
Контакты контактора КМ1 разомкнуты, и между ними нет электрической дуги. Ток из левой фазы (точка а) пройдет через две фазы статора (его обмотка включена звездой) и выйдет в среднюю фазу (точка б). Катушка КМ2 сработает, так как полное сопротивление последовательно включенных двух фазных обмоток статора будет во много раз меньше полного сопротивления катушки контактора КМ2. Контакты контактора КМ1 разомкнутся, но между ними имеется электрическая дуга. В этом случае образуется замкнутая цепь: точка а, контакты К2 и К5, катушка КМ2, электрическая дуга между контактами КМ1, точка О. Таким образом, катушка КМ2 оказывается зашунтированной дугой и не сработает.
Рис. 13. Схема контроллера типа ТА
Контроллер типа Т не является автоматическим, так как при пуске двигателя выдержки времени зависят от крановщика. Предусмотренный в схеме контроллера типа Т контроль противовключения также несовершенен: если реле торможения отрегулировано так, чтобы оно открывало свои контакты при скольжении s= 1,1, то оно отпускает их при скольжении s « 0,9.
Это приводит к тому, что ступень противовключения может быть выведена не при неподвижном двигателе, а только при его вращении в обратную сторону. Данных недостатков лишена более совершенная схема типа ТА. Эта симметричная реверсивная схема предназначена для управления двигателями механизмов горизонтального перемещения (моста, тележки). В схеме предусмотрена установка защитной панели, поэтому в ней отсутствуют максимальные реле. Минимальная защита осуществляется при помощи реле напряжения KV.
Напряжение увеличивают, вводя в цепь катушки реле KF (после его срабатывания) добавочный резистор 3RC, Управление этим резистором производится при помощи блокировочного контактора КВ.
При реверсе двигателя катушка контактора KB на 0,1 с отключается, ее закрытый контакт в цепи управления открывается, предотвращая возможность включения катушки КС, и разомкнутый контакт в цепи катушки KF закрывается. Затем катушка KB снова получает питание, ее закрытый контакт закрывается, а разомкнутый открывается.
Но теперь, если схема работает на противовключение, контакт KF уже открыт. При снижении частоты вращения двигателя его скольжение падает, и при скольжении, равном примерно 1, реле KF замыкает свой контакт и ступень противовключения контактором КС может быть выведена.
В рассмотренной схеме цепи управления и тормозной магнит питаются переменным током. При весьма тяжелом режиме работы крана, характеризующемся высоким значением ПВ и большим числом включений в час, аппаратура переменного тока является ненадежной.
Значительно лучше работают контроллеры с цепями управления на постоянном токе, в частности контроллер типа К, предназначенный для управления двигателями механизмов горизонтального передвижения и имеющий симметричную реверсивную схему. Эту одну из наиболее сложных крановых схем следует рассмотреть подробно.
Автоматическое управление ступенями пускового сопротивления производится при помощи электромагнитных реле времени постоянного тока с демпферными гильзами. Вся аппаратура управления магнитной станции работает на постоянном токе.
Механический тормоз управляется шунтовым электромагнитом постоянного тока, при использовании которого не ограничивается число включений в час. Для быстрого втягивания сердечника электромагнита при растормажи-вании применена форсировка магнитного потока. При срабатывании электромагнита последовательно с его обмоткой автоматически включается добавочное сопротивление, ограничивающее ток длительного режима.
Рис. 14. Схема контроллера типа К
Максимальная защита двигателя осуществляется двумя электромагнитными реле 1КА и 2/04, минимальная защита— реле напряжения 1KV, отключающим двигатель при исчезновении или значительном понижении напряжения в сети трехфазного тока. Нулевая блокировка производится при помощи реле напряжения постоянного тока 2KV.
Работает схема следующим образом: в нулевом положении при включении рубильников Q и S получает питание реле напряжения переменного тока 1KV, которое замыкает свой контакт 1KV в цепи управления. Через сопротивление форсировки RF и катушку тормозного магнита YB получает питание катушка реле торможения KF, которое срабатывает без выдержки времени и закрывает свои контакты KF. Сопротивление катушки тормозного магнита настолько велико, что ток в катушке недостаточен для его срабатывания.
Через контакты командоконтроллера К1 получает питание реле напряжения постоянного тока 2KV, которое закрывает свои контакты и шунтирует контакты командоконтроллера К1. Через контакты командоконтроллера К2 и КЗ и контакты КМ1 и КМ2 получает питание катушка блокировочного реле 4КМ, которое, срабатывая, открывает контакты 4КМ в цепи катушки контактора противовключения ЗКМ и закрывает контакты, шунтирующие часть добавочного сопротивления в цепи катушки реле противовключения KF1.
Это сопротивление подобрано таким образом, что при закрытых контактах 4КМ реле срабатывает при скольжении s — 1,1, а при открытых контактах 4КМ оно отпадает при s = 1. Тем самым обеспечивается надежная работа KF1. Катушки реле ускорения 1КМ1, 1КМ2, 1КМЗи 1КМ4, получая питание, открывают свои контакты. Схема готова к пуску.
При установке рукоятки командоконтроллера в первое положение «Вперед» открываются контакты командоконтроллера К1 и КЗ, но ток в цепях не прерывается, так как контакты К1 зашунтированы контактами 2KV, а контакты КЗ — контактами командоконтроллера К2. Закрывается контакт командоконтроллера К4, и через ранее закрывшиеся контакты KF получает питание катушка контактора форсировки магнита 2KF. Этот контактор срабатывает и замыкает накоротко сопротивление RF. Одновременно получает питание катушка контактора тормозного магнита’ 1KF, контактор срабатывает, в результате чего катушка тормозного магнита оказывается включенной на полное напряжение сети постоянного тока и замыкается накоротко катушка тормозного реле KF, После выдержки времени 0,5 с открываются контакты этого реле, катушка 2KF отключается, контакты 2KF открываются и последовательно с катушкой тормозного магнита включается сопротивление RF. В связи с этим ток в катушке магнита снижается до значения, достаточного для удержания его во втянутом состоянии.
Закрывается контакт командоконтроллера Кб, и включается катушка контактора КМ1, контактор срабатывает и контактами КМ 1 включает двигатель в направлении «Вперед». Катушка 4КМ отключается и после выдержки времени 0,5 с открывает контакты 4КМ, вследствие чего в цепь катушки реле противовключения KF1 вводится дополнительное сопротивление.
В цепь ротора двигателя включено полное сопротивление реостата. При малом сопротивлении движению частота вращения двигателя мала, при большом сопротивлении движению двигатель неподвижен.
При установке рукоятки командоконтроллера во второе и следующие положения уменьшается сопротивление в цепи ротора, контролируемое при помощи реле времени.
Если при вращении двигателя быстро его реверсировать, то скольжение может быть больше чем 1,1. В момент реверса на доли секунды окажется под напряжением катушка реле 4КМ, которое переключит свои контакты и обеспечит невозможность включения контактора противовключения ЗКМ. После выдержки времени около 0,5 с якорь 4КМ отпадет, но так как контакты реле 4КМ открыты, катушка контактора ЗКМ не будет под напряжением до тех пор, пока скольжение не станет равным 1. При отсутствии 4КМ и настройке KF1 на срабатывание при s = 1,1 оно отпадало бы при s = 0,9, т. е. уже после реверса двигателя.
—
Простейшая схема управления короткозамкнутым нереверсивным электродвигателем представлена на рис. 105.
При нажатии кнопки «пуск» катушка контактора Л обтекается током. Сердечник контактора Л втягивается, вследствие чего замыкается цепь главного тока главными контактами контактора и двигатель начинает вращаться. После того как кнопка будет отпущена, питание катушки поддерживается через блок-контакт контактора Л, включенный параллельно кнопке «пуск». В случае снятия напряжения катушка контактора не будет обтекаться током, контактор Л разомкнет свои контакты и двигатель отключится. При восстановлении напряжения двигатель не включится до тех пор, пока не будет нажата кнопка «пуск».
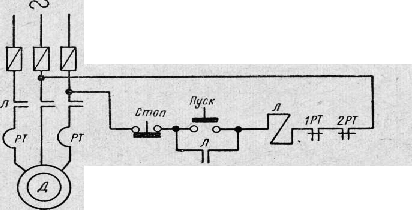
Остановка двигателя осуществляется нажатием кнопки «стоп», вследствие чего размыкается цепь питания катушки контактора. При перегрузке двигателя эта цепь также размыкается за счет размыкания контактов тепловых реле 1РТ и 2РТ, включенных в цепь катушки контактора JI.
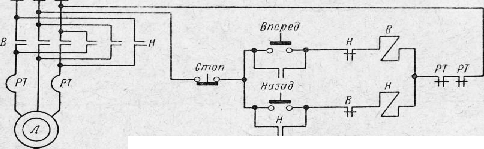
Как было указано выше, на крановых двигателях должно быть предусмотрено реверсирование, т. е. изменение направления вращения. На рис. 106 приведена схема реверсивного управления электродвигателем с короткозамкнутым ротором. В принципе эта схема отличается мало от схемы, приведенной на рис. 1. Здесь имеются два контактора: В—вперед и Н—назад, которые управляются соответствующими кнопками. Для предотвращения одновременного включения контакторов В и Н, что привело бы к короткому замыканию в силовой цепи, в таких схемах обязательно предусматривается блокировка контактов В и Я. В данном случае она осуществляется включением блок-контактов контакторов В и Я в цепи их катушек.
При включенном контакторе В ток в его катушку идет через нормально замкнутый контакт контактора Я. Если теперь нажать кнопку «назад», чтобы включить контактор Я, то ток по катушке Я не пойдет, так как нормально замкнутый блок-контакт В в цепи его катушки уже разомкнут контактом В. При перегрузке двигателя сработает тепловое реле РТ и разомкнет свои нормально замкнутые контакты, которые разомкнут цепи катушки контактора. Схема, показанная на рис. 3, относится к оо нереверсивному управлению асинхронным короткозамкнутым двигателям с так называемым динамическим торможением, которое заключается
в том, что при отключении двигателя в обмотку статора подается постоянный ток, вследствие чего двигатель затормаживается. В остальном схема не отличается от вышгприведенных. Источником постоянного тока является сухой (селеновый или купроксный) выпрямитель СВ с трансформатором Тр. При нажатии кнопки «стоп» отключается контактор, а нормально открытый контакт кнопки «стоп» одновременно включает питание катушки тормозного контактора Т, который своими нормально открытыми контактами замыкает цепь постоянного тока от выпрямителя.
На рис. 4 дана схема управления нереверсивным коротко-замкнутым двигателем в случае применения торможения противо-включением. Работа схемы при пуске ничем не отличается от предыдущих.
При торможении схема работает следующим образом. После нажатия на кнопку «стоп» катушка контактора Л отключается, он срабатывает и отключает двигатель от сети. Одновременно с этим блок-контакты контактора в цепи катушки контактора Т замыкаются. Так как двигатель вращается и контакты реле скорости PC замкнуты, то катушка контактора Т оказывается включенной, контактор срабатывает и включает обмотку статора в сеть переменного тока таким образом, что поле статора вращается в сторону, противоположную направлению вращения ротора. Двигатель начинает работать в режиме противовключения и быстро останавливается. Для ограничения тока при торможении служат сопротивления Rc в цепи статора двигателя.
Контакты реле PC размыкаются при скорости двигателя, близкой к нулю, при этом катушка контактора Т обесточивается, и двигатель отключается от сети. Контакторы Л и Т также сблокированы для предотвращения их одновременного включения.
Перед пуском двигателя включается рубильник Р, а контроллер устанавливается в нулевое положение. Затем кнопкой работы КР включается линейный контактор Л (по цепи 11—7—1—2— —8—9—10). Если один из конечных выключателей разомкнут (кран находится в крайнем положении), то движение возможно лишь в противоположном направлении. Если оба конечных выключателя KB и КН замкнуты, то возможно движение крана в обоих направлениях.
При повороте контроллера «вперед» посредством сегментов замыкаются пальцы С31 и Л32\ С11 и Л12, все три фазы через пальцы контроллера подключаются к статору, и двигатель вращается «вперед».
Отключение двигателя осуществляется поворотом контроллера в нулевое положение. Двигатель отключится также при наезде крана или тележки на один из конечных выключателей или при срабатывании аварийного выключателя АВ.
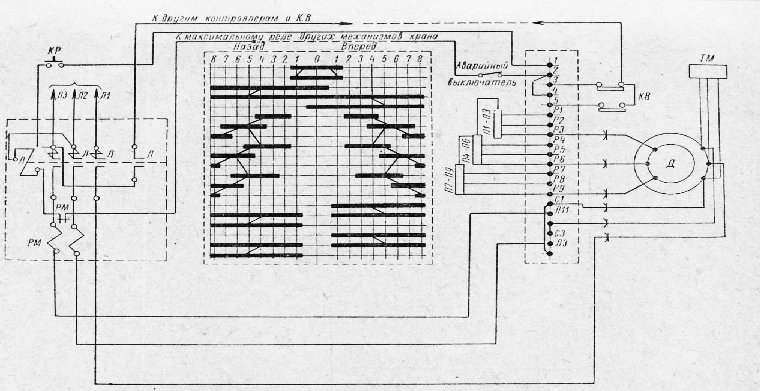
Схема управления двигателем с короткозамкнутым ротором при помощи кулачкового контроллера представлена на рис. 6. Вся аппаратура: линейный контактор Л, максимальное токовое реле РМО, кнопка КР, рубильник Р и плавкие предохранители ПР1 и ПР2 — собрана на общей защитной панели. В отличие от предыдущей схемы (применяемой, как правило, для тихоходных механизмов), здесь мы имеем тормозной электромагнит ТМ, подключенный параллельно двигателю, работа которого была описана ранее.
Пуск двигателя может быть осуществлен лишь при установке контроллера в нулевое положение (контакты IX, VIII и VII замкнуты) и включенном рубильнике Р. Нажатием кнопки работы КР включается линейный контактор Л и поворотом контроллера «вперед» или «назад» обеспечивается движение механизма в нужном направлении.
При выводе контроллера из нулевого положения нормально закрытый контакт IX размыкается, но питание обмотки контактора JI производится через его блок-контакты. При срабатывании какой-либо защиты отключается контактор JI (например, при понижении напряжения, разрыве цепи одного из конечных выключателей и т. д.). Дальнейшая работа схемы возможна лишь после возврата контроллера в нулевое положение, т. е. имеет место нулевая блокировка.
На рис. 7 представлена схема управления электродвигателем с фазовым ротором при помощи барабанного контроллера КТ—3005. Подготовка к пуску (включая установку контроллера в нулевое положение) ничем не отличается от вышеописанной.
На восьмом положении контроллера пальцы РЗ—Р6—Р9 замкнуты, что соответствует полностью выведенному сопротивлению, т. е. двигатель начинает вращаться с максимальной скоростью.
Эта схема, в отличие от предыдущей, вместо плавких предохранителей имеет двухполюсное максимальное токовое реле РМ, отключающее двигатель при перегрузках. Схема обеспечивает защиту от понижения и исчезновения напряжения, блокировку и ограничение хода механизма. Линейный контактор Л, кнопка КР и двухполюсное максимальное токовое реле входят в комплект защитной панели.
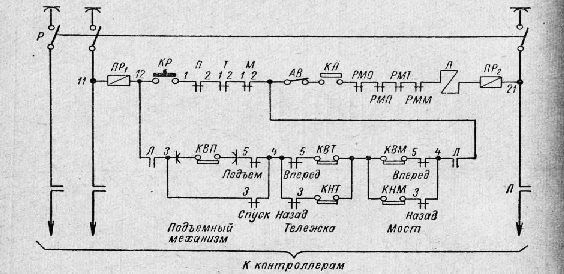
Принцип действия защитной панели типа. В для трех двигателей (подъема, моста и тележки) ясен из схемы-развертки, приведенной на рис. 8. Катушка линейного контактора Л может получить питание при включенном рубильнике Р после нажатия кнопки работы КР при условии, что нулевые контакты всех трех контроллеров замкнуты (нулевое положение), закрыт контакт люка для выхода на настил крана КЛ и замкнут аварийный выключатель АВ. После включения контактора Л кнопка КР может быть отпущена и питание его будет производиться через блок-контакты Л по цепям 12—3 и 2—4, конечные выключатели и пальцы контроллеров 3—4 и 4—5.
После главных (силовых) контактов контактора Л ток подходит к электродвигателям соответственно через отдельные максимальные реле РМП (подъемного механизма), РМТ (механизма тележки) и РММ (механизма моста). Все эти реле — двухполюсные. Третья фаза проходит через общее для всех двигателей реле РМО. При перегрузках электродвигателей действуют соответственно реле РМП, РМТ и РММ. Реле РАЮ защищает все двигатели от коротких замыканий. Нормально закрытые контакты всех четырех реле включены в цепь катушки линейного контактора Л. При перегрузках контакт одного из реле размыкается, и линейный контактор отключает всю схему крана от сети.
При включенном контакторе Л прохождение тока, питающего катушку Л, будет зависеть от положения контроллеров («вперед» или «назад», «подъем» или «спуск»). В нижней части схемы указаны положения контроллеров и направление движения механизмов. В положениях контроллеров «подъем» и «вперед» замыкаются пальцы 5—4, а в положениях «спуск» и «назад» замыкаются пальцы 3—4. При достижении механизмом одного из крайних предельных положений, как уже указывалось выше, разомкнётся соответствующий конечный выключатель и отключит всю схему. Дальнейшая работа будет возможна лишь после приведения всех контроллеров в нулевое положение и при движении в направлении, противоположном тому, при котором сработал конечный выключатель.
Так, например, если сработает конечный выключатель хода тележки «вперед» КВТ, то движение тележки «вперед» станет возможным тогда, когда тележка отойдет «назад» и освободит этот конечный выключатель, после чего он под действием пружины вновь замкнется.
Конечные выключатели моста и тележки ограничивают ход по обе стороны движения, т. е. «вперед» и «назад». У механизмов подъема ограничивается лишь верхний предел движения.
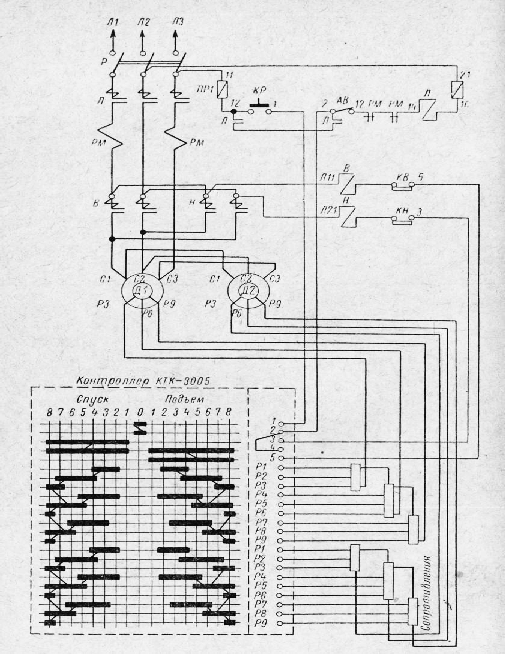
Часто в крановых схемах возникает необходимость одновременного управления двумя электродвигателями (раздельный привод моста крана). На рис. 9 приведена схема одновременного управления двумя двигателями с фазовым ротором при помощи барабанного контроллера типа КТК-3005.
Для уяснения принципа работы магнитного контроллера рассмотрим схему управления электродвигателем с фазовым ротором при Помощи магнитного контроллера типа Т, представленную на рис. 10 для движения «вперед». При движении «назад» работа схемы аналогична, только вместо контактора В замкнется контактор Н.
При включенном рубильнике вспомогательного тока 2Р и нулевом положении командоконтроллера (замкнут нормально закрытый контакт 7(2) получает питание катушка блокировочного реле РБ, реле сработает и замкнет свой н. о. контакт, через который будет питаться вся схема управления после того, как командоконтроллер будет выведен из нулевого положения. Таким образом, пуск возможен лишь при нулевом положении командоконтроллера (нулевая блокировка).
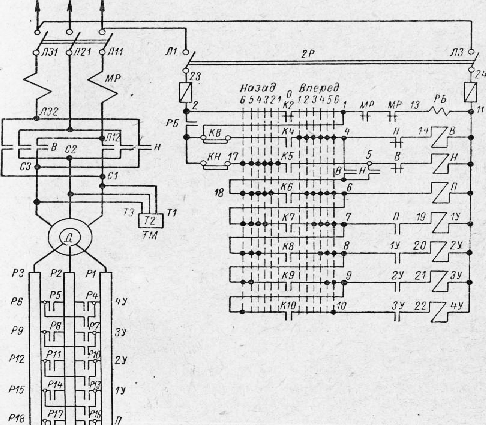
На положении 1 «вперед» в случае, если конечный выключатель ЦВ не разомкнут, через контакт командоконтроллера К4 и н. з. блок-контакт контроллера Н получает питание катушка контактора В, и он срабатывает; н. з. блок-контакт Я в цепи катушки контактора В, так же как и н. з. блок-контакт В в цепи катушки контактора Н служит для того, чтобы включение первого возможно было лишь при разомкнутом положении второго (взаимно запрещающая блокировка). Статор двигателя Д подключается к сети одновременно с тормозным магнитом ТМ, открывающим тормоз. Двигатель подключается к сети с полностью введенным роторным сопротивлением.
В положении 2 «вперед» через блок-контакт контактора В и контакт командоконтроллера Кб включается катушка контактора торможения, контакты которого шунтируют тормозную часть роторного сопротивления.
В положении 3 «вперед» через контакт KJ командоконтроллера и блок-контакт включенного контактора торможения П получает питание катушка контактора ускорения IV и шунтируется следующая часть пускового сопротивления.
На следующих положениях «вперед» последовательно включаются контакторы 2У—4У, шунтирующие соответствующие ступени сопротивления. Как видно из схемы, цепь питания катушки каждого последующего контактора проходит через блок-кон-такты предыдущего контактора, что обеспечивает необходимую последовательность их включения.
В случае перегрузки или резкого снижения напряжения срабатывает блокировочное реле РБ, и сразу же отключается контактор направления В (или Н) и все роторные контакторы, так как цепь питания их катушек проходит через блок-контакты РБ.
При переходе механизма за крайнее положение срабатывает (размыкается) соответствующий конечный выключатель, выключая контактор управления, а за ним и все роторные контакторы.
Контроллеры типа Т имеют реверсивную симметричную схему, допускающую торможение противовключением и регулирование скорости сопротивлениями в цепи ротора. Магнитные контроллеры типа Т применяются для управления трехфазными асинхронными электродвигателями, обслуживающими механизмы горизонтального передвижения.
Для управления трехфазными асинхронными двигателями подъема применяются магнитные контроллеры типа ТС с реверсивной несимметричной схемой, при которой на первых положениях спуска электродвигатель остается включенным в сторону подъема, что обеспечивает получение малых посадочных скоростей для спуска тяжелых грузов.
В этих положениях спуска двигатель по схеме включен на подъем, но под действием груза крюк движется вниз — происходит спуск. Тормозной момент двигателя не дает грузу падать.
Схема магнитного контроллера типа ТС при подъеме груза не имеет принципиальных отличий от схемы рассмотренного выше контроллера типа Т.
При спуске грузов двигатель, управляемый контроллером типа ТС, может работать в режимах тормозного и силового спуска. Для получения малых скоростей опускания тяжелых грузов двигатель переводится в тормозной режим противовключения — тормозной спуск. Этсму режиму соответствуют три первых положения командоконтроллера при спуске: С, 1 и 2.
В режиме силового спуска производится опускание легких грузов, ему соответствуют три положения командоконтроллера: 3, 4 и 5. На этих положениях в генераторном режиме осуществляется тормозной спуск тяжелых грузов.
В положении С рукоятки командоконтроллера включен контактор В, в роторную цепь введено четыре ступени сопротивления ускорения, контактор М отключен.
Таким образом, двигатель включен для работы на подъем, однако он заторможен механическим тормозом. Положение С используется для операций с подвешенным грузом. Переход на первое и второе положения тормозного спуска соответственно сопровождается отключением контакторов 2П и 1П, которые вводят в роторную цепь дополнительные ступени сопротивлений.
Механическое торможение на этих положениях командоконтроллера отсутствует, так как контактор М включен.
После отключения контактора 2П двигатель будет работать, опуская груз в режиме противовключения. Торможение используется при значительных грузах; малый груз не будет способен преодолеть работу двигателя на подъем, и вместо спуска может быть подъем.
В третьем положении командоконтроллера при спуске груза отключается контактор В и включается контактор Я.
В роторную цепь двигателя теперь включены все ступени сопротивления ускорения, а ступени противовключения выведены. При переводе командоконтроллера в четвертое и пятое положения из роторной цепи выводятся дополнительные сопротивления.
В пятом положении двигатель работает с постоянно включенным малым сопротивлением в цепи ротора. Чтобы сделать невозможным увеличение скорости при переводе командоконтроллера из пятого положения в нулевое, контактор 4У остается включенным через н. о. контакт Я. В схеме также предусмотрена блокировка с помощью и. з. контакта 4У, запрещающая включение контактора В до отключения контактора 4У при переходе от силового спуска к тормозному.
При очень напряженных режимах, когда магнитные системы контакторов и тормозов переменного тока не выдерживают большого количества включений из-за нагрева катушек от пусковых токов и частых ударов, применяют магнитные контроллеры с цепями управления на постоянном токе.
В этих контроллерах силовые цепи также питаются переменным током, как и в контроллерах ТС.
Питание цепей управления при этом осуществляется от селенового выпрямителя, установленного в кабине крана или на его мосту.
—
При нажатии кнопки «Пуск» катушка контактора обтекается током. Сердечник контактора втягивается, вследствие чего замыкается цепь главного тока главными контактами контактора, и двигатель начинает вращаться. После того как кнопка будет отпущена, питание катушки поддерживается через блок-контакт контактора, включенный параллельно этой кнопке. В случае снятия напряжения катушка контактора не будет обтекаться током, контактор разомкнет свои контакты и двигатель отключится. При восстановлении напряжения двигатель не включится до тех пор, пока не будет нажата кнопка КнП.
Остановка двигателя осуществляется нажатием кнопки «Стоп», вследствие чего размыкается цепь питания катушки контактора. При перегрузке двигателя эта цепь также размыкается за счет размыкания контактов тепловых реле 1РТ и 2РТ, включенных в цепь катушки контактора Л.
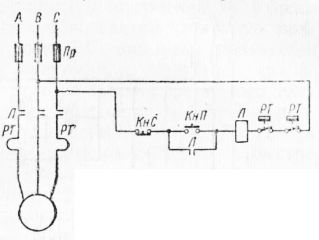
Рис. 1. Схема нереверсивного контакторного управления
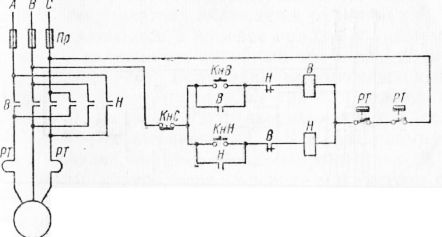
Рис. 2. Схема реверсивного управления
При включенном контакторе В ток в его катушку идет через замкнутый блок-контакт контактора Я. Если теперь нажать кнопку КнН, чтобы включить контактор Я, то ток по катушке Я не пойдет, так как блок-контакт В в цепи его катушки разомкнут контактом В. При перегрузке двигателя сРаботает тепловое реле РТ и разомкнет свои контакты, которые разомкнут цепь катушки контактора.
Схема, показанная на рис. 3, относится к нереверсивному управлению асинхронным короткозамкнутым двигателем с так называемым динамическим торможением, которое заключается в том, что при отключении двигателя в обмотку статора подается постоянный ток, вследствие чего двигатель затормаживается. В остальном схема не отличается от вышеприведенных. Источником постоянного тока является сухой (селеновый) выпрямитель СВ с трансформатором Тр.
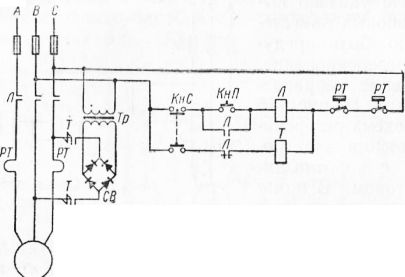
Рис. 3. Схема управления асинхронным двигателем с динамическим торможением
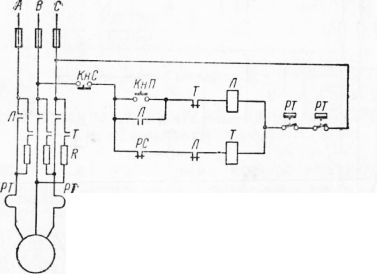
Рис. 4. Схема управления асинхронным двигателем с торможением противовключением
При нажатии кнопки «Стоп» отключается контактор Л, а нормально открытый контакт кнопки «Стоп» одновременно включает питание катушки тормозного контактора Т, который своими нормально открытыми контактами замыкает цепь постоянного тока от выпрямителя.
На рис. 4 дана схема управления нереверсивным короткозамкнутым двигателем в случае применения торможения противовключением. Работа схемы при пуске ничем не отличается от предыдущих.
При торможении схема работает следующим образом. После нажатия на кнопку «Стоп» катушка контактора Л отключается, он срабатывает и отключает двигатель от сети. Одновременно с этим блок-контакты контактора Л в цепи катушки контактора Т замыкаются. Так как двигатель вращается и контакты реле скорости PC замкнуты, то катушка контактора Т оказывается включенной, контактор срабатывает и включает обмотку статора в сеть переменного тока таким образом, что поле статора вращается в сторону, противоположную направлению вращения ротора. Двигатель начинает работать в режиме противовключения и быстро останавливается. Для ограничения тока при торможении служат сопротивления R в цепи статора двигателя.
Контакты реле PC размыкаются при скорости двигателя, близкой к нулю, при этом катушка контактора Т обесточивается и двигатель отключается от сети. Контакторы Л и Т также сблокированы для предотвращения их одновременного включения.
Здесь взамен контакторов В и Я применен контроллер КТ-2006.
Перед пуском двигателя включается рубильник, а контроллер устанавливается в нулевое положение. Затем кнопкой работы КР включается линейный контактор (по цепи 11—7—1—2—8—9—10). Если один из конечных выключателей разомкнут (кран находится в крайнем положении), то движение возможно лишь в противоположном направлении. Если оба конечных выключателя KB и КН замкнуты, то возможно движение крана в обоих направлениях.
Отключение двигателя осуществляется поворотом контроллера в нулевое положение. Двигатель отключится также при наезде крана или тележки на один из конечных выключателей или при срабатывании аварийного выключателя АВ.
Схема управления двигателем с короткозамкнутым ротором при помощи кулачкового контроллера типа НТ-53 представлена на рис. 118. Вся аппаратура: линейный контактор Л, максимальное токовое реле РМО, кнопка КнП, рубильник Р и плавкие предохранители Пр1 и Пр2 — собрана на общей защитной панели. В отличие от предыдущей схемы (применяемой, как правило, для тихоходных механизмов) здесь мы имеем тормозной электромагнит ТМ, подключенный параллельно двигателю, работа которого была описана ранее.
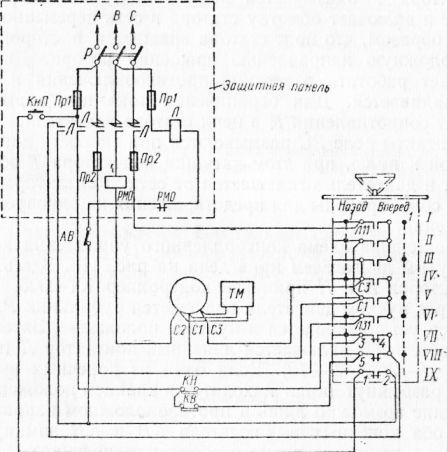
Рис. 5. Схема контроллера НТ-53
Пуск двигателя может быть осуществлен лишь при установке контроллера в нулевое положение и включенном рубильнике Р. Нажатием кнопки пуска КнП включается линейный контактор Л и поворотом контроллера «Вперед» или «Назад» обеспечивается движение механизма в нужном направлении.
При ходе «Назад» замыкаются контакты I и II (зажим CI подключается к контакту Л11) и контакты IV и VI (зажим СЗ подключается к контакту Л31). При срабатывании одного из конечных выключателей цепь катушки линейного контактора разрывается и движение возможно лишь в противоположном направлении.
При выводе контроллера из нулевого положения нормально закрытый контакт 1—2 размыкается, но питание обмотки контактора Л производится через его блок-контакты. При срабатывании какой-либо защиты отключается контактор Л (например, при понижении напряжения, разрыве цепи одного из конечных выключателей и т. д.). Дальнейшая работа схемы возможна лишь после возврата контроллера в нулевое положение, т. е. имеет место нулевая блокировка.
На рис. 6 представлена схема управления электродвигателем с фазовым ротором при помощи барабанного контроллера КТ-2005.
Подготовка к пуску (включая установку контроллера в нулевое положение) ничем не отличается от вышеописанной.
Как видно из рисунка, это симметричная реверсивная схема, в которой предусмотрена максимальная защита с помощью реле РМ и нулевая блокировка посредством пальцеа и сегментов контроллера XI. В цепи управления включены конечные выключатели KB и КН. Пальцы и сегменты контроллера IX, X и XI предназначены для переключения в цепи тока управления, пальцы и сегменты V—VIII служат для управления сопротивлениями в цепи ротора двигателя, а верхние пальцы I—IV — для переключения цепи статора двигателя.
Как видно из схемы, сопротивления в цепи ротора выводятся неравномерно, что позволяет уменьшить число пальцев и сегментов контроллера и тем самым уменьшить высоту » вес контроллера.
Эта схема в отличие от предыдущей вместо плавких предохранителей имеет максимальное токовое реле РМ, отключающее двигатель при перегрузках. Схема обеспечивает защиту от понижения и исчезновения напряжения, блокировку и ограничение хода механизма. Линейный контактор Л, кнопка КнП и двухполюсное максимальное токовое реле входят в комплект защитной панели.
Принцип действия защитной панели типа В для трех двигателей (подъема, моста и тележки) ясен из схемы-развертки, приведенной на рис. 7. Катушка линейного контактора может получить питание при включенном рубильнике Р после нажатия кнопки пуска КнП при условии, что нулевые контакты всех трех контроллеров П, Т и М замкнуты (нулевое положение), закрыт контакт люка для выхода на настил крана КЛ и замкнут аварийный выключатель АВ. После включения контактора Л кнопка КнП может быть отпущена и питание его будет производиться через блок-контакты Л, через конечные выключатели и пальцы контроллеров.
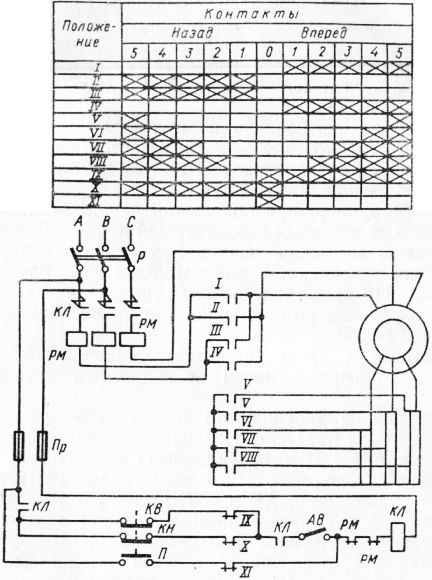
Рис. 6. Схема контроллера типа КТ-2005
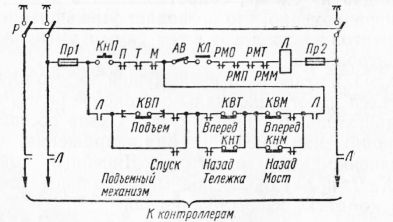
Рис. 7. Схема защитной панели типа В
После главных (силовых) контактов контактора Л ток подходит к электродвигателям соответственно через отдельные максимальные реле РМП (подъемного механизма), РМТ (механизма тележки) и РММ (механизма моста). Все эти реле — двухполюсные. Третья фаза проходит через общее для всех двигателей реле РМО. При перегрузках электродвигателей действуют соответственно реле РМП, РМТ и РММ. Реле РМО защищает все двигатели от коротких замыканий. Нормально закрытые контакты всех четырех реле включены в цепь катушки линейного контактора. При перегрузках контакт одного из реле размыкается и линейный контактор отключает схему крана от сети.
При включенном контакторе Л прохождение тока, питающего катушку, будет зависеть от положения контроллеров «Вперед» или «Назад», «Подъем» или «Спуск». На схеме указаны положения контроллеров и направление движения механизмов. При достижении механизмом одного из крайних предельных положений, как уже указывалось выше, разомкнётся соответствующий конечный выключатель и отключит всю схему. Дальнейшая работа будет возможна лишь после приведения всех контроллеров в нулевое положение и при движении в направлении, противоположном тому, при котором сработал конечный выключатель.
Так, например, если сработает конечный выключатель хода тележки «Вперед» КВТ, то движение тележки «Вперед» станет возможным тогда, когда тележка отойдет назад и освободит этот конечный выключатель, после чего он под действием пружины вновь замкнется.
Конечные выключатели моста и тележки ограничивают ход по обе стороны движения, т. е. «Вперед» и «Назад». У механизмов подъема ограничивается лишь верхний предел движения.
Часто в крановых схемах возникает необходимость одновременного управления двумя электродвигателями (раздельный привод моста крана). На рис. 8 приведена схема одновременного управления двумя двигателями с фазовым ротором при помощи барабанного контроллера типа НТ-102. В отличие от контроллера типа КТ контроллер типа НТ-102 имеет две раздельные роторные цепи (объединять роторы двух машин нельзя во избежание электрических и механических перегрузок), а включение и реверс двигателя осуществляется при помощи контакторов Б и Я. В отличие от этой схемы кнопки В и Я в схеме на рис. 8 заменены контактами контроллера (в положении «Вперед» замыкаются контакты контроллера, включая питание катушки контактора В, а в положении «Назад» замыкаются контакты контроллера, включающие питание катушки контактора).
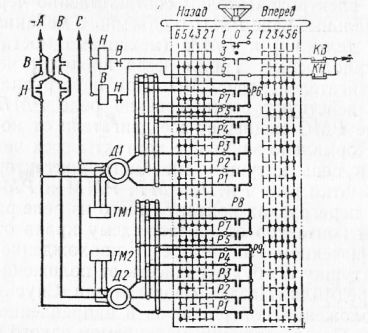
Рис. 8. Схема контроллера типа НТ-102
Для уяснения принципа работы магнитного контроллера рассмотрим схему управления электродвигателем с фазовым ротором при помощи магнитного контроллера типа Т, представленную на рис. 8, для движения «Вперед». При движении «Назад» работа схемы аналогична, только вместо контактора В замкнется контактор Я.
При включенном рубильнике вспомогательного тока 2Р и нулевом положении командоконтроллера [замкнут нормально закрытый (н. з.) контакт К2 получает питание катушка блокировочного реле РБ, реле сработает и замкнет свой нормально открытый (н. о.) контакт, через который будет питаться вся схема управления после того, как коман-доконтроллер будет выведен из нулевого положения. Таким образом, пуск возможен лишь при нулевом положении командоконтроллера (нулевая блокировка).
В первом положении «Вперед» при условии, что конечный выключатель KB не разомкнут, через контакт командокон-троллера К4 и н. з. блок-контакт контроллера Я получает питание катушка контактора В и он срабатывает; н. з. блок-контакт Н в цепи катушки контактора В, так же как и н. з. блок-контакт В в цепи катушки контактора Н, служит для того, чтобы включение первого возможно было лишь при разомкнутом положении второго (взаимно запрещающая блокировка). Статор двигателя Д подключается к сети одновременно с тормозным магнитом ТМ, открывающим тормоз. Двигатель подключается к сети с полностью введенным роторным сопротивлением.
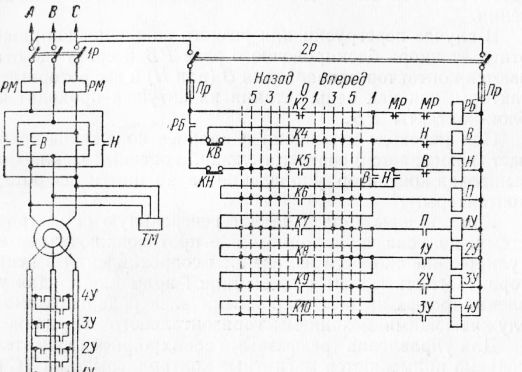
Рис. 9. Схема магнитного контроллера Т
Во втором положении «Вперед» через блок-контакт контактора В и контакт командоконтроллера Кб включается катушка контактора торможения Я, контакты которого шунтируют тормозную часть роторного сопротивления.
В третьем положении «Вперед» через контакт К7 командоконтроллера и блок-контакт включенного контактора торможения П получает питание катушка контактора ускорения и шунтируется следующая часть пускового сопротивления.
В следующих положениях «Вперед» последовательно включаются контакторы 2У—4У, шунтирующие соответствующие ступени сопротивления. Как видно из схемы, цепь питания катушки каждого последующего контактора проходит через блок-контакты предыдущего контактора, чем обеспечивается необходимая последовательность их включения.
В случае перегрузки или резкого снижения напряжения отпадает якорь блокировочного реле РБ и сразу же отключаются контактор направления В (или Н) и все роторные контакторы, так как цепь питания их катушек проходит через блок-контакты РБ.
При переходе механизма в крайнее положение срабатывает (размыкается) соответствующий конечный выключатель, выключая контактор управления, а за ним и все роторные контакторы.
Контроллеры типа Т имеют реверсивную симметричную схему, допускающую торможение противовключением и регулирование скорости изменением сопротивлений в цепи ротора. Магнитные контроллеры типа Т применяются для управления трехфазными асинхронными электродвигателями, обслуживающими механизмы горизонтального передвижения.
Для управления трехфазными асинхронными двигателями подъема применяются магнитные контроллеры типа ТС с реверсивной несимметричной схемой, при которой на первых положениях спуска электродвигатель остается включенным на подъем, что обеспечивает получение малых посадочных скоростей для спуска тяжелых грузов.
В этих положениях спуска двигатель по схеме включен на подъем, но под действием груза крюк движется вниз — происходит спуск. Тормозной момент двигателя не дает грузу падать.
Схема магнитного контроллера типа ТС при подъеме груза отличается от схемы рассмотренного выше контроллера типа Т только наличием специального контактора КМ, управляющего тормозным магнитом.
При спуске грузов двигатель, управляемый контроллером типа ТС, может работать в режимах тормозного и силового спуска. Для получения малых скоростей опускания тяжелых грузов двигатель переводится в тормозной режим противовключением — тормозной спуск. Этому режиму соответствуют три первых положения командоконтроллера при спуске: С, первое и второе.
В режиме силового спуска производится опускание легковых грузов, ему соответствуют три положения командоконтроллера: третье, четвертое и пятое. На этих положениях командоконтроллера в генераторном режиме осуществляется тормозной спуск тяжелых грузов.
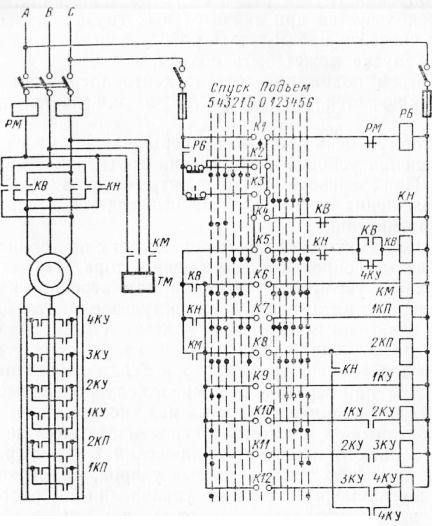
Рис. 11. Схема управления с магнитным контроллером типа ТС
При положении С рукоятки командоконтроллера включен контактор KB, в роторную цепь введено четыре ступени сопротивления ускорения, контактор КМ отключен.
Механическое торможение на этих положениях командоконтроллера отсутствует, так как контактор КМ включен.
После отключения контактора 2КП двигатель будет работать, опуская груз в режиме противовключения. Торможение используется при значительных грузах; малый груз не будет способен преодолевать работу двигателя на подъем и вместо спуска может быть подъем.
В третьем положении командоконтроллера при спуске груза отключается контактор KB и включается контактор кн.
В роторную цепь двигателя теперь включены все ступени сопротивления ускорения, а ступени противовключения выведены. При переводе командоконтроллера в четвертое и пятое положения из роторной цепи выводятся дополнительные сопротивления.
В пятом положении двигатель работает с постоянно включенным малым сопротивлением в цепи ротора. Чтобы сделать невозможным увеличение скорости при переводе командоконтроллера из пятого положения в нулевое, контактор К4У остается включенным через н. о. контакт КН. В схеме также предусмотрена блокировка с помощью и. з. контакта К4У, запрещающая включение контактора KB до отключения контактора К4У при переходе от силового спуска к тормозному.
При очень напряженных режимах, когда магнитные системы контакторов и тормозов переменного тока не выдерживают большого количества включений из-за нагрева катушек от пусковых токов и частых ударов, применяют магнитные контроллеры с цепями управления на постоянном токе. В этих контроллерах силовые цепи также питаются переменным током, как и в контроллерах ТС. Питание цепей управления при этом осуществляется от селенового выпрямителя, установленного в кабине крана или на его мосгу.
Недостатком рассмотренной схемы, как и схемы с контроллером Т, является отсутствие в ней аппаратов, которые автоматически управляли бы контакторами ускорения.
Кроме того, недостатком рассмотренной схемы является еще и то, что при переводе рукоятки командоконтроллера со второго на третье положение спуска, когда осуществляется переход с торможения противовключением на торможение с отдачей энергии в сеть (или наоборот), может быть короткое замыкание. Это происходит при реверсе двигателя, когда электрическая дуга между главными контактами контактора KB еще не успела погаснуть, а контакты КН уже замкнулись.
Возможность короткого замыкания в рассматриваемой схеме была известна давно и для предотвращения его был предложен способ однофазного торможения. Положения командоконтроллера, на которых используется однофазное торможение, разделяли положение торможения противовключением и положение с отдачей энергии в сеть.
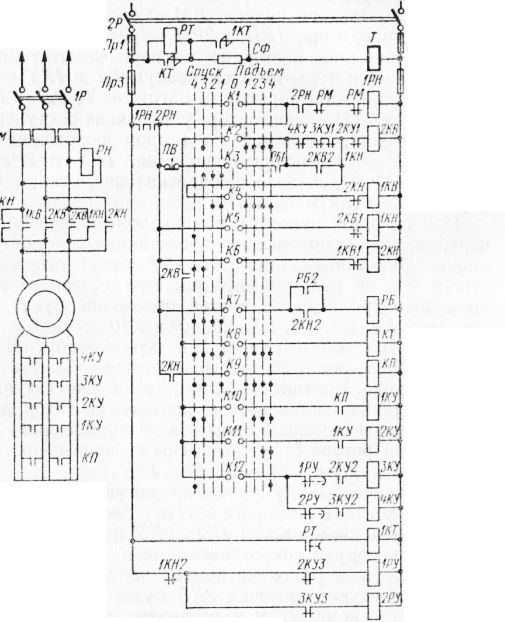
Рис. 124. Схема контроллера типа КС
Рассмотрим схему типа КС, где использовано однофазное торможение.
Эта схема предназначена для работы в тяжелом режиме, цепи управления ее и тормозной магнит питаются постоянным током/
На схеме рис. 12 следующие обозначения: 1KB и 2KB — первый и второй контакторы подъема, 1КН и 2КН — первый и второй контакторы спуска, РМ — электромагнитные реле максимального тока, 1РН и 2РН — реле напряжения, контролирующие цепи постоянного и переменного тока (первое осуществляет и нулевую блокировку), КТ и 1КТ — контакторы, управляющие тормозным магнитом Т, РБ — блокировочное реле, КП — контактор, управляющий ступенью про-тивовключения, вводимой на втором положении спуска, 1КУ—4КУ — контакторы ускорения, 1РУ и 2РУ — реле времени, СФ — добавочное сопротивление, отключаемое при форсировке поля магнита.
При повороте рукоятки командоконтроллера от нуля на первое и второе положения спуска включение двигателя не произойдет, так как контакты РБ будут открыты и катушки KB не получат питания. При установке рукоятки командоконтродлера на третье положение будут закрыты контакты К2, КЗ, Кб, К7, К8, К9 и КЮ.
В результате этого через контакты К2 получит питание катушка 2KB, она сработает и замкнутся ее контакты в цепи главного тока. Контакт Кб включит ток в цепь катушки 2КН, которая также замкнет свои контакты. Статор двигателя будет включен по схеме однофазного торможения.
Блок-контакты 2КН2 включат катушку блокировочного реле РБ, контакты которого вместе с блок-контактами 2КВ2 шунтируют блок-контакты 4КУ, ЗКУ и 2КУ, осуществляющие блокировку с сопротивлениями.
При переводе рукоятки командоконтроллера в четвертое положение спуска катушка 2KB будет отключена, а через закрывшиеся контакты командоконтроллера Ко получит питание катушка контактора 1КН, двигатель будет включен на спуск.
На этом положении происходит принудительный спуск легких грузов и торможение с отдачей энергии в сеть при спуске тяжелых грузов.
Во избежание разгона груза при переходе на торможение с отдачей энергии в сеть и значительного броска тока при отключении сопротивлений ускоряется процесс отключения ступеней пускового реостата и выход двигателя на характеристику, отвечающую наименьшему сопротивлению реостата. Это достигается тем, что одновременно отключаются размыкающими контактами 1КН2 обе катушки реле времени 1РУ и 2РУ.
При переводе рукоятки командоконтроллера с четвертого на третье положение двигатель опять будет включен по схеме однофазного торможения. При переходе с третьего на второе положение через контакты РБ получат питание сначала катушка контактора 2KB, а затем катушка контактора 1KB, двигатель реверсируется, в цепь ротора вводится все сопротивление, и, если на крюке крана подвешен тяжелый груз, будет торможение противовключением. При переводе рукоятки командоконтроллера со второго на первое положение продолжается торможение противовключением, но в цепи ротора будет отключена часть сопротивления, в результате чего скорость спуска груза уменьшится.
При данной схеме спуск легких грузов, может производиться только на четвертом положении (силовой спуск). На третьем положении крюк будет неподвижен, а на втором и первом положениях вместо спуска будет подъем. Поэтому спуск легких грузов необходимо производить только на четвертом положении и перед остановкой двигателя быстро переводить рукоятку командоконтроллера в нулевое положение.
Имеется еще одна возможность избежать короткого замыкания, применив схему ТС с дуговой блокировкой.
Особенностью этой схемы по сравнению со схемой ТС является установка двухполюсных, а не трех-полюсных контакторов направления и дополнительного трех-полюсного линейного контактора, а также иным включением катушек контакторов направления KB и КН.
Рассмотрим эту схему. Поставим рукоятку командоконтроллера на второе положение спуска, когда происходит торможение противовключением.
При переводе рукоятки командоконтроллера в третье положение контакт Кб разомкнётся, а контакт К5 замкнется.
Контакты контактора KB разомкнуты и между ними нет электрической дуги. Ток из левой фазы (точка а) пройдет через две фазы статора (его обмотка включена звездой) и выйдет в правую фазу (точка б). Катушка КН сработает, так как полное сопротивление последовательно включенных двухфазных обмоток статора будет во много раз меньше полного сопротивления катушки контактора КН. Контакты контактора К В разомкнуты, но между ними имеется электрическая дуга. В этом случае образуется замкнутая цепь: точка а, контакты К2 и К.5, катушка КН, электрическая дуга между контактами KB, точка а. Таким образом, катушка КН оказывается зашунтированной дугой и не сработает.
Рис. 13. Схема контроллера типа ТС с дуговой блокировкой
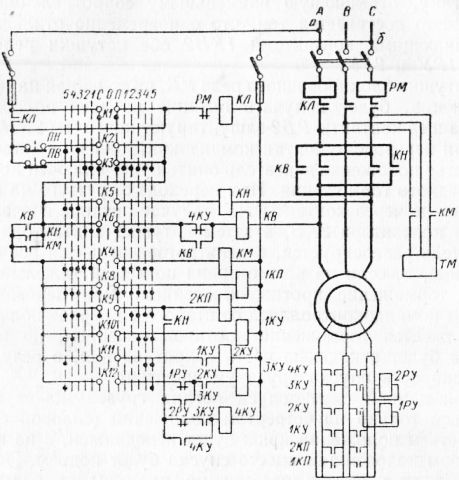
Рис. 14. Схема контроллера типа ГА
Контроллер типа Т не является автоматическим, так как при пуске в ход двигателя выдержки времени зависят от крановщика. Предусмотренный в схеме контроллера Т контроль противовключения также несовершенен — если реле торможения РТ отрегулировано так, чтобы оно открывало свои контакты при скольжении равном 1,1, то оно отпускает их при скольжении примерно равном 0,9.
Это приводит к тому, что выведение ступени противовключения может быть осуществлено не при неподвижном двигателе, а только при его вращении в обратную сторону. Этих недостатков лишена более совершенная схема типа ТА.
Это симметричная реверсивная схема, предназначенная для управления двигателями механизмов горизонтального перемещения (мост, тележка). Схема предусматривает установку защитной панели, поэтому в ней отсутствуют максимальные реле.
Минимальная защита осуществляется при помощи реле напряжения РН. Особенности схемы по сравнению со схемой Т.
1. Наличие реле.времени, которые питаются постоянным током от полупроводникового выпрямителя и осуществляют автоматический пуск в ход двигателя.
2. В схеме предусмотрен контроль торможения противовключением и приняты меры, чтобы реле противовключения, срабатывая и открывая свой’ контакт РП при скольжении, равном 1,1 закрывало его при скольжении, равном единице.
Увеличение напряжения достигается введением в цепь катушки реле РП (после его срабатывания) добавочного сопротивления ЗДС.
Управление этим сопротивлением производится при помощи блокировочного контактора КБ.
При реверсе двигателя катушка контактора КБ на 0,1 сек отключается, ее закрытый контакт в цепи управления откры-вается, предотвращая возможность включения катушки КП, и разомкнутый контакт в цепи катушки РП закрывается.
Затем катушка КБ снова получает питание, ее закрытый контакт закрывается, а разомкнутый открывается.
Но теперь, если работает схема на противовключение, контакт РП уже открыт. При снижении скорости двигателя его скольжение также падает, и при скольжении, равном примерно единице, реле РП замыкает свой контакт и ступень противовключения контактором П может быть выведена.
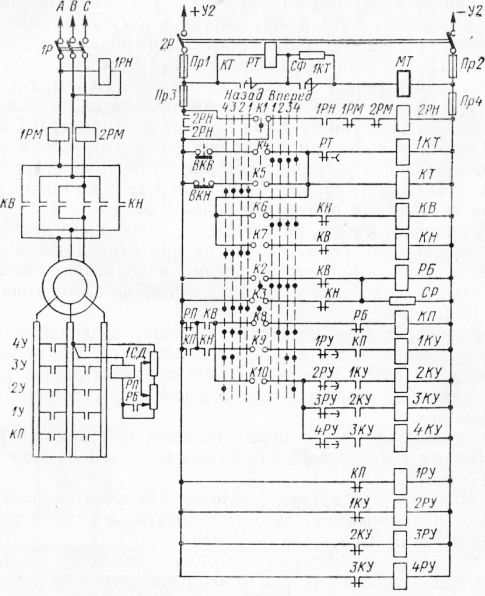
Рис. 15. Схема контроллера типа К
В рассмотренной схеме цепи управления и тормозной магнит питаются переменным током. При весьма тяжелом режиме работа крана характерна высоким значением ПВ и большим числом вктючений в час, аппаратура переменного тока в таких режимах работает ненадежно.
Значительно лучше работают контроллеры с цепями управления на постоянном токе, одним из которых является контроллер типа К.
Этот контроллер предназначен для управления двигателями механизмов горизонтального передвижения и имеет симметричную реверсивную схему.
Эта схема является одной из наиболее сложных крановых схем, и ее следует рассмотреть подробно.
Автоматическое управление ступенями пускового сопротивления производится при помощи электромагнитных реле времени постоянного тока с демпферными гильзами. Вся аппаратура управления магнитной станции работает на постоянном токе.
Механический тормоз управляется шунтовым электромагнитом постоянного тока, при использовании которого нет ограничений по числу включений в час.
Для быстрого втягивания сердечника электромагнита при растормаживании применена форсировка магнитного потока. При срабатывании электромагнита последовательно с его обмоткой автоматически включается добавочное сопротивление, ограничивающее ток длительного режима.
Максимальная защита двигателя осуществляется двумя электромагнитными реле 1РМ и 2РМ, минимальная защита-реле напряжения 1РН, отключающее двигатель при исчезновении или значительном понижении напряжения в сети трехфазного тока. Нулевая блокировка производится при помощи реле напряжения постоянного тока 2РН.
Работает схема следующим образом: на нулевом положении при включении рубильников IP и 2Р получает питание реле напряжения переменного тока 1РН, которое замыкает свой контакт 1РН в цепи управления.
Через сопротивление форсировки СФ и катушку тормозного магнита МТ получает питание катушка реле торможения РТ. Реле РТ срабатывает без выдержки времени и закрывает свои контакты РТ. Сопротивление катушки тормозного магнита настолько велико, что ток в его катушке недостаточен для его срабатывания.
Через контакты командоконтроллера К1 получает питание реле напряжения постоянного тока 2РН, которое закрывает свои контакты и шунтирует контакты командоконтроллера К1.
Через контакты командоконтроллера К2 и КЗ и контакты KB и КН получает питание катушка блокировочного реле РБ, которое срабатывает и открывает контакты РБ в цепи катушки контактора противовключения КП, закрывает контакты, шунтирующие часть добавочного сопротивления в цепи катушки реле противовключения РП.
Это сопротивление подобрано таким образом, что при закрытых контактах РБ реле срабатывает при скольжении s = 1,1, а при открытых контактах РБ оно отпадает при s = 1. Этим обеспечивается надежная работа РП.
Получают питание катушки реле ускорения 1РУ, 2РУ, ЗРУ и 4РУ, которые открывают свои контакты.
Схема готова к пуску.
При установке рукоятки командоконтроллера в первое положение «Вперед» открываются контакты командоконтроллера К1 и КЗ, но ток в цепях не прервется, так как контакты К1 зашунтированы контактами 2РН, а контакты КЗ зашунтированы контактами командоконтроллера К2.
Закрывается контакт командоконтроллера К4 и через ранее закрывшиеся контакты РТ получает питание катушка контактора форсировки магнита 1КТ. Этот контактор срабатывает и замыкает накоротко сопротивление СФ. Одновременно получает питание катушка контактора тормозного магнита КТ, контактор срабатывает, в результате катушка тормозного магнита оказывается включенной на полное напряжение сети постоянного тока и одновременно замыкается накоротко катушка тормозного реле РТ. После выдержки времени 0,5 сек открываются контакты этого реле, катушка 1КТ отключается, контакты 1КТ открываются и последовательно с катушкой тормозного магнита включается сопротивление СФ. Этим ток в катушке магнита снижается до значения, достаточного для удержания его во втянутом состоянии.
Закрывается контакт командоконтроллера Кб и включается катушка контактора KB, контактор срабатывает и контактами KB включает двигатель в направление «Вперед». Катушка РБ отключается и после выдержки времени 0,5 сек открывает контакты РБ, вследствие чего в цепь катушки реле противовключения РП вводится дополнительное сопротивление.
В цепь ротора двигателя включено полное сопротивление реостата. При малом сопротивлении движению двигатель вращается с малой скоростью, при большом сопротивлении движению двигатель неподвижен.
При установке рукоятки командоконтроллера во второе положение и в следующие происходит уменьшение сопротивления в цепи ротора, контролируемое при помощи реле времени.
Если при вращении двигателя быстро его реверсировать, то скольжение может быть больше, чем 1,1. В момент реверса на доли секунды окажется под напряжением катушка реле РБ, которое переключит свои контакты и обеспечит невозможность включения контактора противовключения КП. После выдержки времени около 0,5 сек якорь РБ отпадет, но, так как контакты реле РБ будут открыты, катушка контактора КП не будет под напряжением до тех пор, пока скольжение не станет равным единице. При отсутствии РБ и при настройке РП на срабатывание при s = 1,1 оно отпадало бы при s = 0,9, т. е. уже после реверса двигателя.
Рекламные предложения:
Главная → Справочник → Статьи → Форум
Механизация земляных работ
Механизация строительства
Механизация дорожных работ
Автоматизация строительства
→ Бетонные работы
→ Мини-тракторы
 Разделы
Разделы
Строительные машины и оборудование
→ Для специальных земляных работ
→ Дорожно-строительные машины
→ Строительное оборудование
→ Асфальтоукладчики и катки
→ Большегрузные машины
→ Строительные машины, часть 2,
→ Дорожные машины, часть 2
→ Ремонтные машины
→ Ковшовые машины
→ Автогрейдеры
→ Экскаваторы
→ Бульдозеры
→ Скреперы
→ Грейдеры
Эксплуатация строительных машин
→ Эксплуатация средств механизации
→ Эксплуатация погрузочных машин
→ Эксплуатация паровых машин
→ Эксплуатация экскаваторов
→ Эксплуатация подъемников
→ Эксплуатация кранов перегружателей
→ Эксплуатация кузовов машин
→ Крановщикам и стропальщикам
Ремонт строительных машин
Ремонт дорожных машин
Ремонт лесозаготовительных машин
Ремонт автомобилей КАмаЗ
Техническое обслуживание автомобилей
Очистка автомобилей при ремонте
Материалы и шины
Остались вопросы по теме:
"Элементы электрических крановых схем переменного тока"
— воспользуйтесь поиском.
→ Машины городского хозяйства
→ Естественная история машин
→ Транспортная психология
→ Пожарные автомобили
→ Автомобили-рефрижераторы
→ Монтаж и эксплуатация лифтов
→ Тракторы