Строй-Техника.ру
Строительные машины и оборудование, справочник
Контроллеры постоянного тока типа НП кулачковые применяют для управления электродвигателями последовательного, смешанного и параллельного возбуждения. Схема управления двигателями последовательного возбуждения наиболее распространена в крановых установках.
У контроллеров с одинаковой схемой замыкания для обоих направлений вращения в первом положении барабана обмотки двигателя подключаются к сети через полное пусковое сопротивление, параллельно якорю включено сопротивление для получения малой частоты вращения электродвигателя. В следующих положениях контроллера отключается параллельно включенное сопротивление и последовательно замыкаются накоротко соответствующие ступени пускового сопротивления.
Реверсирование электродвигателей последовательного возбуждения производится переключением обмотки якоря.
Рекламные предложения на основе ваших интересов:
Дополнительные материалы по теме:
Контроллеры с неодинаковой схемой замыкания применяют исключительно для электродвигателей последовательного возбуждения механизмов подъема.
В первом положении подъема обмотки электродвигателя включаются в сеть через пусковое сопротивление. При последующих положениях последовательно замыкаются накоротко соответствующие ступени сопротивления.
В положениях спуска обмотки электродвигателя включаются по потенциометрической схеме. Реверсируется всегда обмотка якоря. Скорость спуска при переходе с одного положения в последующее увеличивают, выводя ступени сопротивления включенного в цепь якоря и вводя сопротивление в параллельную ей цепь обмотки возбуждения.
При спуске легких грузов, не преодолевающих сопротивления механизмов, электродвигатель развивает момент, направленный в сторону спуска (двигательный режим). Работая в генераторном режиме при спуске тяжелых грузов, электродвигатель, начиная с определенной частоты вращения, тормозит груз, опускающийся под действием собственного веса. Контакты цепи управления в контроллере предназначены для осуществления схем нулевой блокировки и конечной защиты.
Для обеспечения конечной защиты и включения электромеханических тормозов в дополнение к контроллеру требуется электромагнитный контактор. Конечные выключатели воздействуют на тяговую катушку этого контактора. Электромеханические тормоза включаются блокировочными контактами контактора.
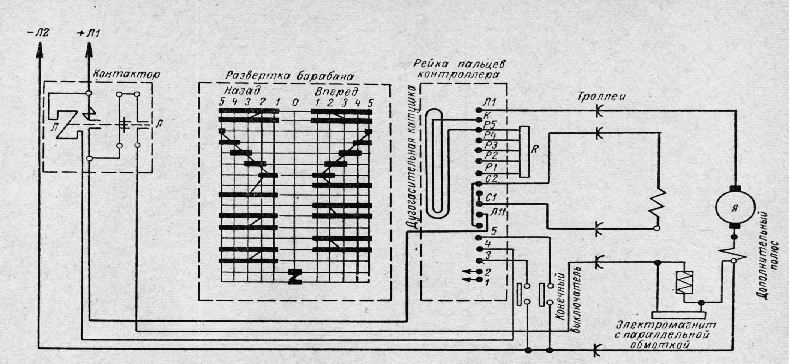
Рассмотрим схему управления двигателем постоянного тока с контроллером КП-2026, приведенную на рис. 1. Контроллер имеет дугогасящую катушку LM3. При установке барабана контроллера в первое рабочее положение включается контактор и отключается после перевода барабана в нулевое положение. Контактор отключается также при размыкании одного из конечных выключателей Q1 и Q2. Проследим цепь питания катушки контактора: один конец ее включен в главную цепь (+Л1), а второй конец присоединен к пальцу 4 контроллера и через сегменты контроллера (в зависимости от направления) и один из конечных выключателей соединен со вторым проводом главной цепи (—Л2).
Рис. 1. Схема управления с контроллером КП-2026 и контактором
Двигатель, получив питание через все сопротивление резистора R, начнет вращаться на малых оборотах. При повороте барабана во второе, третье и четвертое положения уменьшается сопротивление в цепи двигателя и частота вращения его растет; в пятом положении сопротивление полностью выводится, двигатель оказывается включенным на полное напряжение сети и имеет наибольшую частоту вращения. При движении «Назад» схема будет работать аналогичным образом.
Одновременно с включением электродвигателя включается и параллельный тормозной электромагнит YB. Схема управления двигателями постоянного тока с электрическим торможением рассмотрена ниже.
Управление двигателем постоянного тока с помощью барабанного контроллера типа КПТ осуществляется по схеме, представленной на рис. 2. Контроллер имеет пять рабочих положений и три тормозных. Кроме главного барабана контроллер снабжен дополнительным переключающим барабаном, который переключается только тогда в другое положение, когда барабан проходит все положения торможения, возвращаясь из положений «Ход».
Рис. 2. Схема управления с контроллером типа КПТ
В тормозных положениях двигатель отключается от сети, переходит на генераторный режим и его якорь замыкается на сопротивление, что вызывает торможение. На схеме обозначено: L1 — обмотка возбуждения; R — реостат регулировочный; R1 — резистор тормозной; YB — тормозной электромагнит; М — двигатель.
На рис. 3 показаны отдельные положения контроллера типа КПТ, соответствующие работе двигателя в обычном режиме и режиме торможения.
Рис. 3. Развертка схемы с контроллером типа КПТ
Следующие четыре рабочих положения отличаются от первого тем,что сопротивление в цепи двигателя постепенно уменьшается. На обеих сторонах контроллера имеются нулевые положения, в которых двигатель отключается от сети.
Рис. 4. Схема управления с кулачковым контроллером ПКС-6006
Тормозной магнит включается и растормаживает механизм только в положениях «Ход», а в тормозных положениях контроллера он не получает питания и тормозит механизм. В первом тормозном положении контроллера двигатель работает в генераторном режиме на нагрузку, состоящую из сопротивления RT и соединенного последовательно с ним добавочного тормозного сопротивления RF.
По мере снижения скорости контроллер переводят во второе и третье тормозные положения, уменьшая сопротивление (ступени 2—3 и 3—4 закорачиваются). В тормозных положениях, так как двигатель работает в режиме генератора, направление тока в его обмотке возбуждения меняется на обратное, что показано стрелкой.
Схема управления двигателем постоянного тока с последовательным возбуждением приведена на рис. 4, а развертка его схемы в отдельных положениях контроллера — на рис. 6.22. Здесь применен кулачковый контроллер типа ПКС-6006.
При спуске груза двигатель включается по схеме «безопасный спуск». При этом обмотка возбуждения двигателя подключена к сети независимо от якоря через сопротивление. Якорь включен в сеть последовательно с дополнительными полюсами L2 с введением в его цепь резистора (R8—R9),
Наиболее сильное торможение, а следовательно, и наименьшая скорость наблюдаются в первых положениях контроллера, а с переходом его в следующие положения вследствие ослабления тормозного момента частота вращения постепенно возрастает. Скорость изменяют, ослабляя ток в цепи обмотки возбуждения введением в цепь возбуждения сопротивления резистора (R7—R6—R5—R4) и последовательно выключая из цепи якоря ступени резистора R4—R1, в связи с чем приложенное к якорю напряжение повышается.
При спуске легких грузов, не преодолевающих сопротивления механизма подъема, двигатель работает в нор-мальном режиме; при спуске тяжелых грузов он переключается на генераторный режим. Переход из двигательного режима в генераторный с изменением направления тока в обмотке якоря производится автоматически и плавно, без толчков.
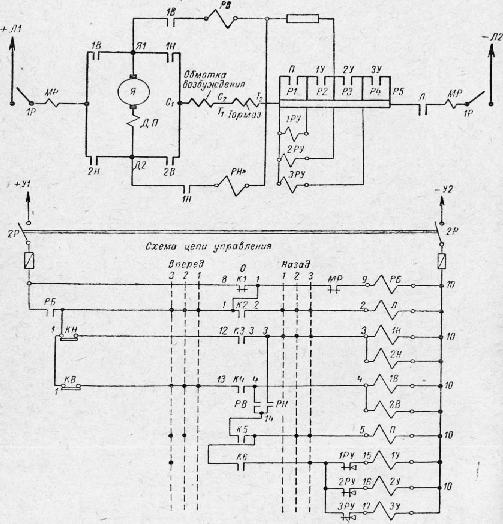
Для управления двигателями постоянного тока, так же как и переменного, можно применять магнитные контроллеры. Схема управления с магнитным контроллером типа П, изображенная на рис. 6.23, предназначена для механизмов передвижения. Этот контроллер имеет симметричную схему включения, в которой предусмотрены торможение противовключением и регулирование частоты вращения пусковыми резисторами.
Проследим работу контроллера во всех его положениях. В нулевом положении двигатель отключен от сети. Реле нулевой блокировки KB получает питание лишь после включения рубильников силовой QS и контрольной SA цепей, срабатывает и самоблокируется через свой замыкающий контакт KB, подавая тем самым напряжение в цепи управления.
Рис. 5. Схема магнитного контроллера типа П
В первом положении «Вперед» через контакт командо-контроллера К2 включается катушка линейного контактора КМ, а через контакт КЗ — катушки контакторов ЩМ1 и 2КМ1 и двигатель включается в сеть при полностью введенном сопротивлении. Контакты контактора 1КМ1 замыкаются, и через них получает питание катушка реле противовключения KF. В свою очередь, при срабатывании реле KF его контакты замкнут цепь питания контакта К5 контроллера.
Катушки реле ускорения получат питание за счет падения напряжения на участках тормозного сопротивления RF1—RF3 и мгновенно разомкнут свои размыкающие контакты (эти контакты действуют с выдержкой времени на замыкание) Щ, 2К, ЗК- Во втором положении «Вперед» включается контактор противовключения KMF, шунтируя ступень резистора RF1 и катушку реле 1К, контакты которого замкнутся с выдержкой времени 1 с и подготовят к включению катушку контактора 1КМ.
В третьем положении «Вперед» замкнутся контакты командоконтроллера Кб и сработает контактор ускорения ЩМ, который после замыкания контактов Щ выведет ступень резистора RF2 и зашунтирует катушку 2К.
После срабатывания второго реле включится контактор 2КМ, выключит ступень RF3 резистора и зашунтирует катушку ЗК. Через замкнувшиеся контакты ЗК включится последний контактор ускорения ЗК и выведет ступень RF4 резистора. На этом пуск двигателя заканчивается.
Если перевести командоконтроллер сразу в третье положение, контакторы и реле начнут автоматически замыкаться в следующем порядке: ЩМ1 и 2КМ1, KF, KMF. Затем после выдержки времени 1 с замкнутся контакты 1К и включится 1КМ. Далее последовательно автоматически включаются контакты 2К (с выдержкой времени 0,8 с) 2КМ, ЗК (с выдержкой времени 0,8 с) и ЗКМ, чем и заканчивается запуск двигателя.
При необходимости быстрой остановки используют режим противовключения — командоконтроллер переводят в первое положение обратного хода. Двигатель, получая питание через контакты контакторов 1КМ2 и 2КМ2, продолжает вращаться по инерции в направлении «Вперед» и оказывается в режиме противовключения с полностью введенным сопротивлением в цепь якоря RF1—RF4\ ЭДС якоря в этом случае почти полностью уравновешивает напряжение сети, и реле KV (или реле KF, если движение происходило в обратном направлении) не сработает вплоть до полной остановки якоря.
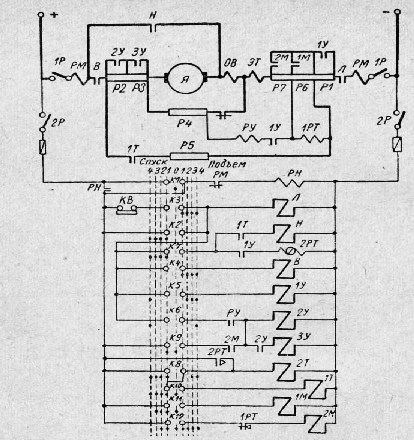
Для управления двигателями подъема применяют магнитные контроллеры типа ПС (рис. 6.24). Контроллер имеет четыре ступени регулирования при работе двигателя на подъем и четыре при работе на спуск. Схема включения контакторов несимметрична и предусматривает различные режимы работы двигателя при установке рукоятки командоконтроллера в положение подъема или спуска.
Рис. 6. Схема управления с магнитным контроллером типа ПС
Линейный контактор КМ получает питание через контакт КЗ при подъеме груза и через контакт К4 при спуске груза. Для ограничения подъема крюка выше допустимого предела служит конечный выключатель SQ, контакторы которого введены в цепь КЗ.
В первом и втором положениях рукоятки командо-контроллера при работе двигателя на подъем главная цепь двигателя шунтируется ступенью RF4 резистора посредством замыкающего контакта KF2, что дает возможность получить более глубокое регулирование скорости подъема, чем при простом реостатном шунтировании. При подъеме груза ступени RF6 и RF7 резистора шунтируются контактором KYA2.
Во втором положении рукоятки командоконтроллера включается контактор 1КМ, который шунтирует сопротивление RF1 и замыкает цепь катушки реле ускорения; его контакт подготавливает к включению цепь катушки контактора 2КМ. В третьем положении получает питание катушка контактора KF2, вследствие чего отключается ступень RF4 резистора, шунтирующая главную цепь двигателя. При установке рукоятки в четвертое положение последовательно включаются контакторы ускорения 2КМ и ЗКМ.
При быстром переводе рукоятки командоконтроллера в четвертое положение реле ускорения К замкнет свой контакт, когда двигатель достигнет 60—70 % своей номинальной частоты вращения. Катушки контакторов 2КМ и ЗКМ получат питание только после того, как замкнется контакт К. Также будет работать реле К и при быстром переводе рукоятки командоконтроллера в четвертое положение при спуске груза.
При спуске груза в первом положении командоконтроллера включаются контакторы KF1 и КМ2. Блокировать катушку контактора КМ2 замыкающим контактом KF1 необходимо, чтобы предотвратить свободное падение груза, так как при отключенном контакте KF1 и включенном контакте КМ2 двигатель не создаст тормозного момента, а тормозной электромагнит откроет тормоз.
При включенных контакторах KF1 и КМ2 якорь двигателя и обмотка возбуждения будут включены параллельно, двигатель работает с более жесткой характеристикой, и поэтому скорость опускания груза ограничена. При втором положении командоконтроллера откроется контакт К9, катушки контакторов ускорения 2КМ и ЗКМ будут отключены, а в цепь якоря вводятся сопротивления ступеней RF3 и RF2 резистора. Увеличение сопротивления в цепи якоря приводит к уменьшению частоты вращения в двигательном режиме и к возрастанию ее в генераторном режиме. В третьем положении откроется контакт К12, отключится катушка контактора КУЛ2, в цепь возбуждения будет введено сопротивление ступени RF7, ток возбуждения машины уменьшится, частота вращения возрастет.
При переводе командоконтроллера в четвертое положение включатся контакторы ускорения 1КМ, 2КМ и ЗКМ, которые зашунтируют ступени сопротивления RF1, RF2 и RF3 цепи якоря. Контакт KJ откроется, катушка контактора KYA1 отключится, а в цепь обмотки возбуждения будет введена ступень RF6 резистора, которая снизит ток возбуждения.
Двигатель при спуске груза можно остановить, постепенно переводя командоконтроллер из четвертого положения в первое. В случае необходимости быстрой остановки при спуске груза командоконтроллер сразу переводят в нулевое положение, при этом отключаются катушки контактора КМ2 и реле 2KF.
Якорь двигателя, его обмотка возбуждения и тормозной электромагнит отключаются от сети и замыкаются контактором на сопротивления RF2, RF3, RF5 и RF7; машина будет работать в режиме генераторного торможения с самовозбуждением. Через 0,4—0,6 с сработает реле 1KF, катушка которого шунтируется контактом КУА1, и включит контактор KYA2, закорачивающий ступень резистора RF7. После этого через 0,7— 1 с реле 2I{F откроет свой контакт в цепи контакторов KF1 и KF2. Якорь двигателя с обмоткой возбуждения теперь будет замкнут на ступень сопротивления RF4, и торможение усилится. Двигатель в этом положении также работает в режиме генераторного торможения с самовозбуждением, но еще прибавляется тормозное усилие тормоза, так как его катушка отключена.
В схеме предусмотрены блокировки, а именно: контакторы КМ1 и KF1 имеют механическую блокировку, исключающую их одновременное включение; контакторы KYA1 и 1К.М сблокированы так, что при переходе из третьего положения при спуске в четвертое положение сначала открывается KYA1, а затем ЩМ.
Сопротивления RF1 и RF6 больше всех остальных сопротивлений, и неправильная блокировка контакторов приведет к значительным броскам тока.
Магнитные контроллеры постоянного тока типов П и ПС рассчитаны только на электродвигатели и тормозные электромагниты последовательного возбуждения. При параллельном или смешанном возбуждении требуется специальное исполнение контроллеров.
Для более подробного ознакомления с работой магнитных контроллеров постоянного тока типов П и ПС ниже приведены развертки схемы для некоторых положений и характеристики моментов и частоты вращения сериесных электродвигателей, управляемых этими контроллерами.
Рис. 7. Момент М и частота вращения электродвигателей последовательного возбуждения, управляемых магнитными контроллерами типа П
В положении 1 изображена развертка главной цепи контроллера в момент включения. Контакторы ЩМ2 и 2КМ2 замкнуты, и ток проходит последовательно через якорь двигателя, обмотку возбуждения, тормозной магнит и сопротивление всех резисторов от RF1 до RF5. Так как сопротивление при этом настолько велико, что ток при неподвижном якоре не превышает 60—70% тока полной нагрузки, то электродвигатель не может развить достаточного момента для того, чтобы начать движение. Как только командо-контроллер будет поставлен в следующее положение и контактор KMF замкнется, сопротивление уменьшится настолько, что ток достигнет значения, превышающего ток полной нагрузки. Это создаст избыточный момент, и механизм начнет ускорение.
По мере увеличения частоты вращения ток, а следовательно, и момент электродвигателя падают по кривой. Как только частота вращения увеличится настолько, что момент двигателя станет равным моменту приложенной нагрузки, дальнейшее ускорение прекратится. В это время замкнется контактор 1КМ и момент электродвигателя увеличится.
Таким же образом происходит процесс ускорения и при замыкании контакторов 2КМ и ЗКМ, после чего двигатель оказывается включенным на полное напряжение и вращается с полной скоростью.
Эти рассуждения велись в предположении, что электродвигатель перед пуском находился в состоянии покоя. Иначе обстоит дело, если перед этим двигатель вращался в противоположном направлении. Для того чтобы остановить вращающийся электродвигатель, рукоятку ко-мандоконтроллера ставят в положение «Назад». При этом размыкаются контакторы 1КМ1 и 1КМ2 и замыкаются 2КМ1 и 2КМ2. К якорю электродвигателя теперь приложено напряжение обратной полярности, и последовательно с ним включено полное сопротивление резистора, ограничивающее ток и момент. Эта операция называется торможением противовключением. Момент электродвигателя меняет знак, и двигатель начинает резкое торможение до полной остановки.
Если цель данной операции — только остановить электродвигатель, то рукоятка контроллера после этого переводится в нулевое положение. Если же предполагалось изменить направление вращения, то контроллер оставляют в положении хода назад и ускорение в обратном направлении происходит так же, как было описано для хода вперед.
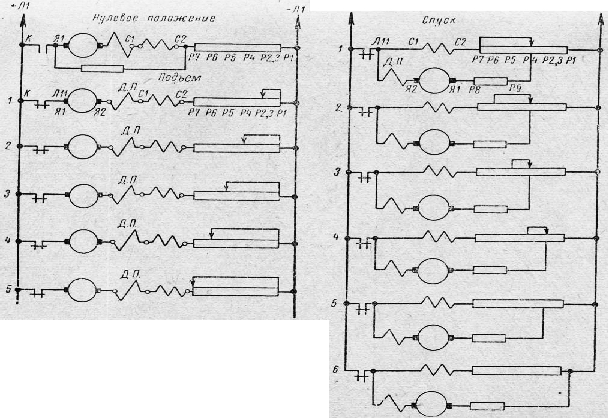
На рис. 7 штриховой линией нанесена характеристика противовключения при введении дополнительной регулировочной ступени резистора. Схема магнитного контроллера типа ПС, предназначенного для управления электродвигателями подъемных механизмов, построена несколько иначе. В положениях подъема она совпадает со схемой для контроллера П, за исключением того, что в первых двух положениях подъема путем некоторого изменения схемы тока параллельно якорю может быть включено сопротивление, снижающее скорость подъема легких грузов.
Рис. 8. Развертка силовой цепи в положении подъема магнитного контроллера типа ПС
Рис. 9. Развертка силовой цепи контроллера типа ПС в положении спуска
Во всех положениях спуска обмотка возбуждения включена не последовательно с якорем, как обычно, а параллельно, но последовательно с частью пускового сопротивления. Другая часть сопротивления включается последовательно с якорем с целью понизить напряжение на его зажимах.
Благодаря такой схеме включения ток в обмотке возбуждения почти не зависит от тока в якоре, и даже при токе, равном нулю в обмотке якоря, или токе обратного направления обеспечено возбуждение требуемых величины и направления. Этим характеристики в положениях спуска напоминают характеристики электродвигателя с параллельной обмоткой возбуждения. При шунтовом двигателе в каждом положении контроллера обеспечивается возможность спускать и легкие грузы, не преодолевающие потерь в механизме, и тяжелые грузы, стремящиеся своей массой вращать электродвигатель, который при этом работает как генератор, автоматически меняя направление тока в обмотке якоря и осуществляя динамическое торможение. Пуск и ускорение электродвигателя, осуществляемые при подъеме груза по принципам, распространяющимся и на механизмы передвижения (контроллер типа П), при спуске груза различаются тем, что одновременно с уменьшением сопротивления в цепи якоря вводится сопротивление в цепь обмотки возбуждения.
Для иллюстрации пределов регулирования и изменения частоты вращения в зависимости от нагрузки в каждом положении контроллера служит график, по горизонтальной оси которого откладывают момент электродвигателя в процентах от момента его полной нагрузки, а по вертикальной оси — его частоту вращения. За 100 % принимается частота вращения при полном напряжении и моменте, равном 100%.
Такие характеристики для схемы передвижения (контроллер типа П) изображены на рис. 7, а для схемы подъема (контроллер типа ПС) — на рис. 10. Контроллер типа П (передвижения) имеет по три фиксированных положения для каждого направления вращения. Первое положение служит для противовключения, и при вращении электродвигателя с полной скоростью в обратном направлении в этом положении он развивает тормозной момент, составляющий около ПО % момента полной нагрузки. В положении 2 момент достигает значения примерно 140 % и начинается ускорение. При установившемся режиме и полной нагрузке скорость в этом положении не превышает 30 % номинальной.
Положение 3 является последним положением, и при этом электродвигатель работает по своей автоматической характеристике. Между положениями 2 и 3 имеются два, а при больших мощностях двигателя три промежуточных положения, не фиксированных на командоконтроллере и служащих для смягчения пуска двигателя — уменьшения пусковых толчков тока и момента. Кривые на рис. 7, соответствующие этим положениям, обозначены ЗА и ЗБ. Контроллер типа ПС (для подъема) имеет по четыре фиксированных на командоконтроллере положения, что вполне достаточно для плавной регулировки скорости как при подъеме, так и при спуске любого груза в пределах грузоподъемности крана.
Рис. 10. Момент М и частота вращения электродвигателей последовательного возбуждения, управляемых магнитными контроллерами типа ПС
Первые два положения, обеспечивающие ускорение подъема груза, могут быть использованы также для медленного подъема легкого груза путем незначительного изменения схемы цепи управления, в результате которого параллельно якорю включается часть пускового сопротивления.
В первом положении подъема электродвигатель развивает момент, приблизительно равный 40 % момента полной нагрузки. Этого достаточно для ускорения подъема легких грузов. Во втором положении пусковой момент достигает 130 % момента полной нагрузки, и это положение может быть использовано для пуска двигателя с любой нагрузкой, вплоть до номинальной грузоподъемности крана, а также для подъема различных грузов с пониженной скоростью.
Положение соответствует скорости, составляющей примерно 50 % номинальной при подъеме полного груза, а в положении, являющимся последним, электродвигатель работает по своей автоматической характеристике.
Рис. 11. Схема динамического торможения магнитных контроллеров типов П и ПС
Рис. 12. Реле управления магнитных контроллеров
Между положениями 3 и 4 имеется одно, а в мощных контроллерах два промежуточных пусковых положения. Положения эти не фиксированы на командоконтрол-лере и служат только для снижения пусковых толчков. Кривая на рис. 10, соответствующая этому положению, обозначена 4А.
В нулевом положении командоконтроллера, а также при внезапном прекращении подачи электроэнергии двигатель автоматически замыкается на резистор, вследствие чего начинаются динамическое торможение и работа механического тормоза. Если по какой-либо причине механический тормоз откажет, то даже самый тяжелый груз опустится с минимальной скоростью. Развертка силовой схемы для этого случая показана на рис. 11.
В первом положении спуска электродвигатель развивает около 20% пускового момента, что вполне достаточно для преодоления трения в механизме и для ускорения. При спуске тяжелых грузов момент быстро меняет знак — электродвигатель переходит на торможение. Происходит это при скорости около 10 % номинальной, а затем скорость увеличивается, достигая при полной нагрузке около 20 % номинальной. В этом положении обеспечивается безопасный спуск самых тяжелых грузов.
В положениях втором, третьем и четвертом скорость при тормозном моменте, равном 64%, что примерно соответствует массе номинального груза, достигает соответственно 40, 100 и 170% номинальной.
Кроме этих положений контроллеры типа ПС имеют еще два или три положения, не фиксированных на командо-контроллере и предназначенных для смягчения спуска груза — уменьшения толчков тока и момента.
Контроллеры типов П и ПС являются автоматическими, т. е. требуемая последовательность замыкания и размыкания контакторов обеспечивается автоматически при помощи системы реле. Ниже кратко описано реле, контролирующее работу магнитного (контакторного) контроллера.
Представленная на рис. 12 конструкция реле является в основном общей для всех реле, применяемых в схемах контакторного контроллера. Якорь при помощи пружины прижимается острием ребра к пластине и ярму, состоящему из угольника и круглого сердечника, на котором насажена катушка. С якорем реле связана система, образованная одним или двумя разомкнутыми контактами и одним замкнутым контактом, служащим одновременно упором для якоря.
Якорь только тогда притягивается к сердечнику, когда магнитный поток в магнитной системе возрастает до значения, достаточного для преодоления действия пружины, и отпадает в момент, когда этот поток становится меньше необходимого для удержания притянутого якоря. Магнитная система реле имеет большую площадь сечения, что обусловливает большой магнитный поток. При замыкании катушки реле накоротко (без предварительного отключения ее от источника питания) магнитный поток и ток в катушке спадают не мгновенно, а по кривой, представленной на рис. 13.
Через время, которое определяется магнитными данными реле, поток спадает до величины х, недостаточной для удержания якоря. Перемещение этой точки х, а следовательно, и время отпадания якоря реле можно регулировать, изменяя нажатие пружины.
Если внутри катушки поместить массивный медный цилиндр, то ток может медленно спадать и при размыкании катушки. В этом случае медный цилиндр явится как бы вторичной короткозамкнутой обмоткой, и с удерживающим потоком будет сцеплен ток этой вторичной обмотки.
Реле такой же конструкции используют в контакторных контроллерах в качестве реле напряжения. При достаточном для притягивания якоря напряжении на зажимах катушки, а следовательно, и числе ампер-витков якорь замкнет одну и разомкнет вторую систему контактов. Напряжение срабатывания реле в этом случае можно регулировать, изменяя натяг пружины или зазор между якорем и сердечником.
Принцип действия реле для управления контакторным контроллером рассмотрим на нижеследующих примерах. На рис. 14 представлена часть схемы контакторного контроллера, состоящая из двух смежных ступеней пускового резистора (Rl—R2 и R2—R3), двух контакторов KMF и ЩМ, катушки контактора ЩМ, катушки реле Щ и его контактов.
В положении, показанном на рис. 14, оба контактора разомкнуты и ток электродвигателя проходит через обе ступени резистора, причем параллельно ступени R1—R2 включена катушка реле Щ. При этом падения напряжения в секции резистора R1—R2, являющегося в то же время напряжением на катушке Щ, достаточно для притягивания и удержания реле, поэтому его контакты разомкнуты и катушка контактора ЩМ не возбуждена.
Если контактор KMF замкнется под действием своей катушки (не показана на схеме), то ступень резистора R1—R2 окажется замкнутой накоротко, а вместе с ней и катушка реле Щ. Якорь реле отпадает не сразу вследствие постепенного падения тока в катушке, и до того как он отпадет, схема имеет вид, представленный на рис. 15.
Рис. 13. График спадания магнитного потока реле времени
Рис. 14. Схема включения реле первой ступени ускорения
По истечении времени, определяемого уставкой реле, якорь его отпадает, замкнет контакты и вызовет замыкание контактора ЩМ. Если катушку еще одного реле включить параллельно ступени R1—R3, то контактами этого реле можно замкнуть следующий контактор точно так же, как было описано для контактора ЩМ. Комбинацией из этих реле и контакторов осуществляется автоматический контроль времени пуска контакторного контроллера типа П.
Для вывода последней ступени резистора при контроллере, имеющем четыре пусковые ступени, достаточно выдержки времени, определяемой временем срабатывания одного контактора. В этом случае реле является излишним и катушка последнего контактора замыкается блок-контактами предыдущего контактора.
Автоматический пуск контроллером типа ПС производится иным способом. В схеме этого контроллера катушка контактора ускорения приводится в действие контактами реле, включенного параллельно якорю и работающего как реле напряжения. По мере увеличения частоты вращения электродвигателя возрастает напряжение на его щетках, и когда частота вращения достигнет значения, при котором безопасно вывести следующую ступень резисто — ра, якорь реле притянется, замкнет свои контакты и включит катушку очередного контактора ускорения.
Рис. 15. Схема включения реле и контакторов ускорения
Рис. 16. Схема включения реле первой и второй ступеней ускорения
Рис. 17. Схема работы реле торможения контроллера типа ПС
При генераторном режиме резкое торможение и замедление вращающегося электродвигателя, осуществляемые усилением его поля или уменьшением сопротивления в цепи якоря, не менее вредны, чем резкое ускорение; в схеме контроллера типа ПС предусмотрен автоматический контроль времени замедления.
На рис. 17 показана часть схемы контроллера типа ПС для четвертого положения спуска (максимальная скорость), поясняющая работу реле торможения. Как было указано ренее, в этом положении, как и во всех положениях спуска, якорь электродвигателя с частью резистора образует одну цепь, а обмотка возбуждения с се-риесным тормозным магнитом и другой частью резистора — вторую цепь, параллельную первой.
Все контакты командоконтроллера замкнуты. Катушка замкнутого контактора 2Т возбуждена, а следовательно, его контакты разомкнуты. При резком переводе командоконтроллера в нулевое положение контактор IT не разомкнётся, а контактор 2Т не замкнется, пока не отпадет якорь реле торможения. Катушка этого реле снабжена медным цилиндром; с момента отключения его намагничивающей обмотки до момента отпадания якоря проходит около 0,75 с, что достаточно для значительного снижения частоты вращения электродвигателя.
После замыкания контактора 2Т и размыкания контактора IT схема принимает свой нормальный вид для нулевого положения, аналогичный представленному на рис. 6.30.
Рис. 18. Схема работы реле противовключения контроллера типа П
Контроль торможения противовключением показан на схеме рис. 6.37, поясняющей принцип работы реле противовключения контроллера типа П. На схеме изображена цепь во втором положении хода вперед.
Рассмотрим два случая. При пуске из состояния покоя сразу же в момент включения — замыкания контакторов КМ1 и КМ2 — реле КТ замкнется, так как к его катушке приложено падение напряжения в цепи якоря и в ступени. резистора R1—R5, являющейся значительной частью пускового резистора. Замкнувшись, реле КТ замкнет цепь катушки контактора KMF и позволит произвести нормальный пуск по принципу, описанному ранее. Иначе обстоит дело, если в этом положении двигатель продолжает вращаться в обратную сторону. Тогда его противо-электродвижущая сила действует в обратном направлении по отношению к падению напряжения в резисторе до тех пор, пока электродвигатель не остановится, электродвижущая сила его не станет равной нулю и при дальнейшем ускорении не изменит знак на совпадающий с падением напряжения в пусковом резисторе.
Так как катушка реле противовключения КТ включена параллельно участку цепи, включающей часть резистора и якорь двигателя, то в момент торможения противовключением напряжение на его клеммах равно разности напряжений в обоих этих элементах и недостаточно для притяжения якоря.
По мере уменьшения частоты вращения электродвигателя напряжение в его якоре падает, а напряжение в катушке реле возрастает. Регулировкой реле можно добиться замыкания его и начала ускорения в обратном направлении при любом значении частоты вращения. Обычно реле устанавливают так, чтобы оно сработало приблизительно при состоянии покоя электродвигателя.
Таким образом, в этой схеме реле автоматически защищает от пуска в обратную сторону, если электродвигатель еще не остановился, без чего толчки пускового тока достигли бы недопустимой величины.
Кроме нормального исполнения, когда для каждого электродвигателя предназначен отдельный контроллер, возможно такое исполнение контроллеров, при котором двумя электродвигателями, работающими на общий привод, управляет один контроллер. Эти контроллеры называются дуплексными и имеют типовое обозначение ДП для механизмов передвижения и ДПС для механизмов подъема.
Каждый электродвигатель дуплексного управления снабжен отдельными контакторами и пусковым резистором. Катушки однозначных контакторов обоих электродвигателей соединены параллельно и управляются одним комплектом реле и одним командоконтроллером. При такой схеме можно управлять двумя двигателями, жестко-связанными и работающими на общий привод, не опасаясь неравномерного распределения нагрузки между ними.
Для возможности работать в аварийном случае на одном электродвигателе, отключив другой, панели дуплексных контроллеров для каждого электродвигателя снабжены двухполюсным рубильником. Поскольку в дуплексном контроллере предусмотрен только один комплект реле управления, все они при помощи многополюсного рубильника могут быть переключены в цепь работающего электродвигателя. Так как в контроллере подъема обязательно имеется тормозной магнит последовательного включения, может оказаться необходимым, отключив один из электродвигателей, оставить тормоз его действующим. Такой случай возможен, например, когда тормоз установлен не на конце вала электродвигателя, а на одном из промежуточных валов или когда усилия одного оставшегося тормоза недостаточно для удержания груза.
Для того чтобы облегчить это переключение, на панели дуплексного контроллера типа ДПС устанавливают два четырехполюсных рубильника, переключающих тормозной магнит аварийного электродвигателя последовательно в цепь оставшегося, а также развивающих цепь динамического торможения аварийного электродвигателя. Ввиду последнего обстоятельства небезразлично положение рубильников во время нормальной работы обоих электродвигателей.
Для контроллеров типа ДП такого переключения не предусмотрено, так как применять тормоза, связанные с контроллером, для механизма передвижения необязательно. Но даже в случае их использования отключение одного из них не так опасно, как в механизме подъема.
—
Рассмотрим схему управления двигателем постоянного тока с контроллером КГ1-2026, приведенную на рис. 1.
При установке барабана контроллера в первое рабочее положение включается контактор, остающийся включенным до перевода барабана в нулевое положение. Отключение контактора также происходит при размыкании одного из конечных выключателей. Проследим цепь питания катушки контактора: один конец ее включен в главную цепь, а второй конец ее соединен с пальцем 4 контроллера и через сегменты контроллера 3 или 4 (в зависимости от направления) и один из конечных выключателей соединяется со вторым проводом главной цепи.
Контактор включится и палец Л11 контроллера окажется под напряжением. При повороте контроллера в положение «вперед» сегменты барабана соединят ЛИ с С1 и через обмотку возбуждения двигателя и якорь потечет ток по цепи: палец С2 — сегмент барабана — палец Р1 — сопротивление R — палец Р5 — дугога-сящая катушка — палец К — сегмент барабана — палец Л1 — троллейный контакт — провод Л2 сети питания. Двигатель, получив питание через все сопротивление R, начнет вращаться на малых оборотах. Поворот барабана во 2-е, 3-е и 4-е положения уменьшает сопротивление в цепи двигателя, скорость вращения его растет и в положении 5 сопротивление полностью выводится, двигатель оказывается включенным на полное напряжение сети и имеет наибольшую скорость. При движении «назад» схема будет работать аналогичным образом.
Одновременно с включением электродвигателя включается и параллельный тормозной электромагнит.
Схема управления двигателями постоянного тока с электрическим торможением рассмотрена ниже.
Управление двигателем постоянного тока с помощью барабанного контроллера типа КПТ осуществляется по схеме, изображенной на рис. 2. Контроллер имеет рабочих положений и тормозных. Кроме главного барабана, контроллер имеет дополнительный переключающий барабан, который переключается на другое положение только тогда, когда главный барабан проходит все положения торможения, возвращаясь от положений «ход». В тормозных положениях двигатель отключается от сети, переходит на генераторный режим и его якорь замыкается на сопротивление, что вызывает торможение.
На рис. 3 показаны отдельные положения контроллера КПТ, соответствующие работе двигателя в обычном режиме и режиме торможения.
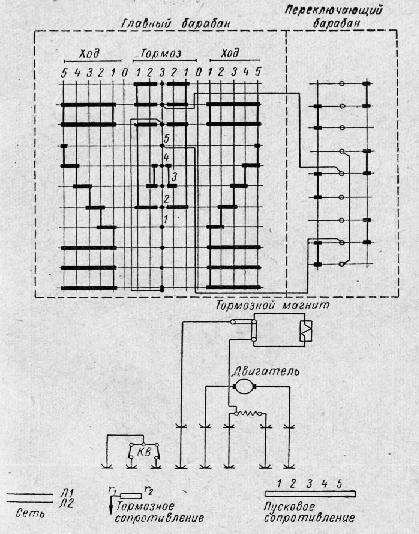
В первом рабочем положении ток от провода сети последовательно проходит через обмотку возбуждения, якорь двигателя все пусковое сопротивление и конечный выключатель главного тока к проводу. Следующие рабочие положения 2—5 отличаются от первого тем, что величина сопротивления в цепи двигателя постепенно уменьшается. На обеих сторонах контроллера имеются нулевые положения, в которых двигатель отключается от сети. Тормозной магнит включается и растормаживает механизм только на положениях «ход», а на тормозных положениях контроллера он не получает питания и тормозит механизм.
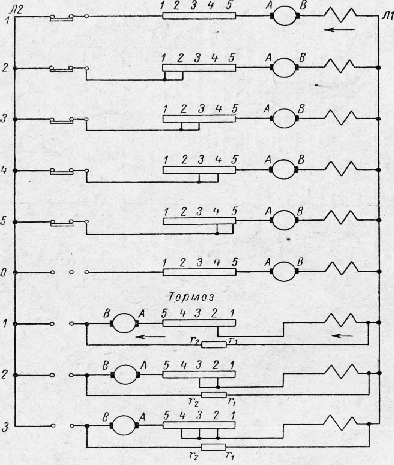
В первом тормозном положении контроллера двигатель работает в генераторном режиме на нагрузку, состоящую из сопротивления 2—5 и соединенного последовательно с ним добавочного тормозного сопротивления.
По мере снижения скорости контроллер переводят во второе и третье тормозные положения, уменьшая сопротивление (ступени 2—3 и 3—4 закорачиваются). В тормозных положениях, так как двигатель работает в режиме генератора, направлений тока в его обмотке возбуждения меняется на обратное.
Схема управления двигателем постоянного тока с последовательным возбуждением приведена на рис. 4, развертка его схемы на отдельных положениях контроллера приведена на рис. 120. Здесь применен кулачковый контроллер типа ПКС-6006.
При спуске груза двигатель включается по схеме «безопасного спуска». При этом обмотка возбуждения двигателя подключается к сети независимо от якоря через сопротивление. Якорь включен в сеть последовательно с введенным в его цепь сопротивления.
Наиболее сильное торможение, а следовательно, и наименьшая скорость, получается на первых положениях контроллера, а с переходом его в следующие положения, вследствие ослабления тормозного момента, скорость постепенно возрастает. Изменение скорости достигается ослаблением тока в цепи обмотки возбуждения (введением в цепь возбуждения сопротивления Р7—Р6—Р5— Р4 и последовательным выключением из цепи якоря ступеней сопротивления Р4—Р1, что дает повышение приложенного к якорю напряжения).
При спуске легких грузов, не преодолевающих сопротивление механизма подъема, двигатель работает в нормальном режиме, при спуске тяжелых грузов он переключается на генераторный режим.
Переход из двигательного режима в генераторный, с изменением направления тока в обмотке якоря, производится автоматически и плавно, без толчков.
Для управления двигателями постоянного тока так же, как и переменного, могут применяться магнитные контроллеры.
Схема управления с магнитным контроллером типа П, изображенная на рис. 5, предназначена для механизмов передвижения. Этот контроллер является регулируемым и дает возможность осуществить торможение противовключением.
Проследим работу контроллера во всех его положениях. В нулевом положении двигатель отключен от сети. Реле нулевой блокировки РБ получает питание лишь после включения рубильников силовой IP и контрольной 2Р цепей, срабатывает и самоблокируется через свой нормально открытый контакт РБ, подавая этим самым напряжение в цепи управления.
В положении «вперед» через контакт командоконтроллера К.2 включается катушка линейного контактора Л, одновременно через контакт К4 включаются катушки контакторов 1В и 2В и двигатель включается в сеть при полностью введенном сопротивлении.
Контакты контактора 1В замыкаются и через них получает питание катушка реле противовключения РВ. В свою очередь, при срабатывании реле РВ его контакты замкнут цепь, питания контакта К5 контроллера.
Катушки реле ускорения получат питание за счет падения напряжения на участках тормозного сопротивления Р1—РЗ и мгновенно разомкнут свои нормально закрытые контакты (эти контакты действуют с выдержкой времени на замыкание). В положении 2 «вперед» включается контактор про-тивовключения, шунтируя ступень сопротивления Р1 и катушку реле , контакты которого замкнутся с выдержкой времени в 1 сек и подготовят к включению катушку контактора. В положении 3 «вперед» замкнутся контакты командоконтроллера Кб и сработает контактор ускорения, который после замыкания контактов 1РУ выведет ступень сопротивления и зашунтирует катушку.
После срабатывания второго реле включится контактор 2У, выключит ступень РЗ сопротивления и зашунтирует катушку ЗРУ. Через замкнувшиеся контакты ЗРУ включится последний контактор ускорения ЗУ и выведет ступень сопротивления Р4. На этом пуск двигателя заканчивается.
Если перевести командоконтроллер сразу на третье положение, контакторы и реле начнут автоматически замыкаться в следующем порядке: 1В и 2В, РВ, П. Затем после выдержки времени 1 сек замкнутся контакты 1РУ и включится 1У. Далее последовательно и автоматически включаются контакты 2РУ и (с выдержкой времени 0,8 сек) 2У, ЗРУ и (с выдержкой времени около 0,5 сек) ЗУ, на чем и заканчивается запуск двигателя.
При необходимости быстрой остановки используется режим противовключения — командоконтроллер переводят “в первое положение обратного хода. Двигатель получает питание через контакты контакторов 1Н и 2Н и, продолжая вращаться по инерции в направлении «вперед», оказывается в режиме противовключения с полностью введенным сопротивлением в цепь якоря Р1—Р5\ электродвижущая сила якоря в этом случае почти полностью уравновешивает напряжение сети и реле РН (или реле РВ, если движение происходило в обратном направлении) не сработает вплоть до полной остановки якоря.
Для управления двигателями подъема применяются магнитные контроллеры типа ПС.
Схема контроллера приведена на рис. 7.
Контроллер имеет четыре ступени регулирования при работе двигателя «на подъем» и четыре при работе «на спуск». Схема включения контакторов несимметрична и осуществляет различные режимы работы двигателя при установке рукоятки командоконтроллера в положение «подъем» или «спуск».
Линейный контактор получает питание через контакторы КЗ при подъеме и через К2 при спуске груза. Для ограничения подъема крюка выше допустимого предела служит конечный выключатель KB, контакты которого введены в цепь КЗ.
В первом и втором положениях рукоятки командоконтроллера при работе двигателя на подъем главная цепь двигателя шунтируется сопротивлением Р4 посредством нормально закрытого контакта 2Т, что дает возможность получить более глубокое регулирование скорости при подъеме, чем при простом реостатном шунтировании.
При подъеме груза сопротивления Р6 и Р7 шунтируются контактором 2М.
Во втором положении рукоятки командоконтроллера включается контактор, который шунтирует сопротивление Р1 и замыкает цепь катушки реле ускорения РУ, а его контакт подготавливает к включению цепь катушки контактора 2У.
В третьем положении получает питание катушка контактора 2Т, вследствие чего отключается сопротивление Р4, шунтирующее главную цепь двигателя. При установке рукоятки в четвертое положение последовательно включаются контакторы ускорения 2У и ЗУ.
При быстром переводе рукоятки командоконтроллера в четвертое положение реле ускорения РУ замкнет свой контакт, когда двигатель достигнет 60—70% своей номинальной скорости. Катушки контакторов 2У и ЗУ получат питание только после того, как замкнется контакт РУ.
Также будет работать реле РУ и при быстром переводе рукоятки командоконтроллера в четвертое положение при спуске груза.
При спуске груза в первом положении командоконтроллера включаются контакторы 1Т и Я. Блокировка катушки контактора Я нормально открытым контактом IT необходима для предотвращения свободного падения груза, так как при отключенном контакте 1Т и включенном Я двигатель не создаст тормозного момента, а тормозной электромагнит откроет тормоз.
При включенных контакторах 1Т и Я якорь двигателя и обмотка возбуждения будут включены параллельно, двигатель будет работать с более жесткой характеристикой и поэтому скорость опускания груза будет ограничена.
При втором положении командоконтроллера откроется контакт К9, катушки контакторов ускорения 2У и ЗУ будут отключены, в цепь якоря будут введены сопротивления РЗ и Р2.
Увеличение сопротивления в цепи якоря приводит к уменьшению скорости в двигательном и возрастанию ее в генераторном режиме.
В третьем положении откроется контакт Д72, отключится катушка контактора 2М, в цепь возбуждения будет введено сопротивление Р7, ток возбуждения машины уменьшится, скорость возрастет.
При переводе командоконтроллера в четвертое положение включатся контакторы ускорения 1У,2У и ЗУ, которые зашунтируют сопротивления PI, Р2 и РЗ цепи якоря. Контакт КИ откроется, катушка контактора 1М отключится и. в цепь обмотки возбуждения будет введено сопротивление Р6, которое снизит величину тока возбуждения.
Остановка двигателя при спуске может быть сделана постепенным переводом командоконтроллера из четвертого положения в первое.
При необходимости быстрой остановки груза при спуске командоконтроллер сразу переводят в нулевое положение, при этом отключаются катушка контактора Я и реле 2РТ.
Якорь двигателя, его обмотка возбуждения и тормозной электромагнит отключаются от сети и замыкаются контактором IT на сопротивления Р2, РЗ, Р5 и Р7, машина будет работать в режиме генераторного торможения с самовозбуждением.
Через 0,4—0,6 сек сработает реле 1РТ, катушка которого шунтируется контактом 1М, и включит контактор 2М, закорачивающий сопротивление Р7.
После этого через 0,7—1,0 сек реле 2РТ откроет свой контакт в цепи контакторов 1Т и 2Т.
Якорь двигателя с обмоткой возбуждения теперь будет замкнут на сопротивление Р4 и торможение усилится.
Двигатель в этом положении также работает в режиме генераторного торможения с самовозбуждением, но еще прибавляется тормозное усилие тормоза, так как его катушка отключена.
Величины Р1 и Р6 больше всех остальных сопротивлений и неправильная блокировка контакторов приведет к значительным броскам тока.
—
Рассмотрим схему управления двигателем постоянного тока с контроллером типа КП-2026, приведенную на рис. 1.
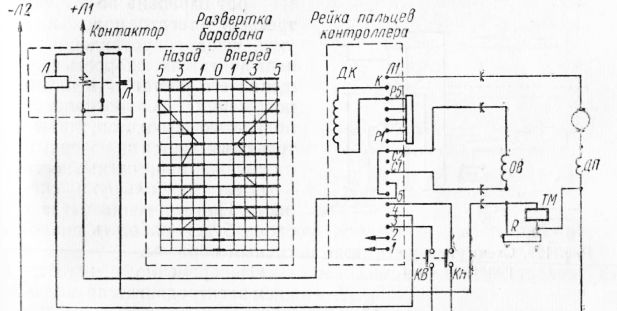
Рис. 1. Схема управления с контроллером КП и контактором
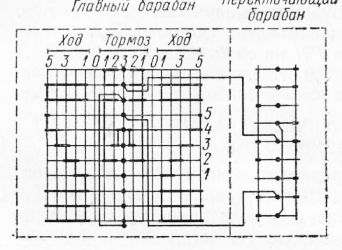
Рис. 2. Схема управления с контроллером КПТ
Одновременно с включением электродвигателя включается и параллельный тормозной электромагнит.
Схема управления двигателями постоянного тока с электрическим торможением рассмотрена ниже.
Управление двигателем постоянного тока с помощью барабанного контроллера типа КПТ осуществляется по схеме на рис. 129. Контроллер имеет пять рабочих положений и три тормозных. Кроме главного барабана, контроллер имеет дополнительный переключающий барабан, который переключается на другое положение только тогда, когда барабан проходит все положения торможения, возвращаясь от положений «Ход». В тормозных положениях двигатель отключается от сети, переходит на генераторный режим и его якорь замыкается на сопротивление, что вызывает торможение.
На рис. 3 показаны отдельные положения контроллера КПТ, соответствующие работе двигателя в обычном режиме и режиме торможения.
В первом рабочем положении ток от провода Л1 сети последовательно проходит через обмотку возбуждения, якорь двигателя, все пусковое сопротивление и конечный выключатель главного тока к проводу Л2. Следующие четыре рабочих положения отличаются от первого тем, что величина сопротивления в цепи двигателя постепенно уменьшается. На обеих сторонах контроллера имеются нулевые положения, в которых двигатель отключается от сети. Тормозной магнит включается и растормаживает механизм только на положениях «Ход», а на тормозных положениях контроллера он не получает питания и тормозит механизм. В первом тормозном положении контроллера двигатель работает в генераторном режиме на нагрузку, состоящую из сопротивления Rn и соединенного последовательно с ним добавочного тормозного сопротивления RT.
По мере снижения скорости контроллер переводят во второе и третье тормозные положения, уменьшая сопротивление (ступени 2—3 и 3—4 закорачиваются). В тормозных положениях, так как двигатель работает в режиме генератора, направление тока в его обмотке возбуждения меняется на обратное.
Схема управления двигателем постоянного тока с последовательным возбуждением приведена на рис. 4, развертка его схемы на отдельных положениях контроллера приведена на рис. 5. Здесь применен кулачковый контроллер типа ПКС-6006.

Рис. 3. Развертка схемы с контроллером КПТ
При спуске груза двигатель включается по схеме «безопасного спуска». При этом обмотка возбуждения двигателя подключена к сети независимо от якоря через сопротивление. Якорь включен в сеть последовательно с введенным в его цепь сопротивлением (Р8-Р9).
Наиболее сильное торможение, а следовательно, и наименьшая скорость, получается на первых положениях контроллера, а с переходом его в следующие положения вследствие ослабления тормозного момента скорость постепенно возрастает. Изменение скорости достигается ослаблением тока в цепи обмотки возбуждения введением в цепь возбуждения сопротивления (Р7-Р6-Р5-Р4) и последовательным выключением из цепи якоря ступеней сопротивления Р4-Р1, что дает повышение приложенного к якорю напряжения.
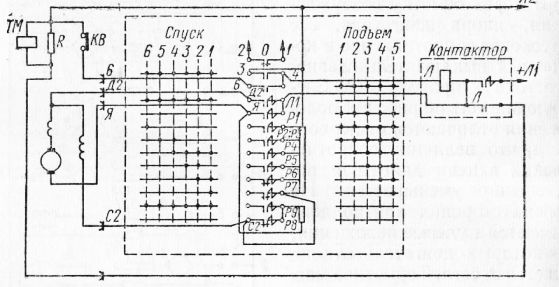
Рис. 4. Схема управления с кулачковым контроллером ПК.С-6006
При спуске легких грузов, не преодолевающих сопротивление механизма подъема, двигатель работает в нормальном режиме, при спуске тяжелых грузов он переключается на генераторный режим.
Переход из двигательного режима в генераторный, с изменением направления тока в обмотке якоря, производится автоматически и плавно, без толчков.
Для управления двигателями постоянного тока так же, как и переменного, могут применяться магнитные контроллеры.
Схема управления с магнитным контроллером типа П, изображенная на рис. 6, предназначена для механизмов передвижения. Этот контроллер имеет симметричную реверсивную схему включения, в которой предусмотрено торможение противовключением и регулирование скорости пусковыми сопротивлениями.

Рис. 5. Развертка схемы с контроллером ПКС-6006
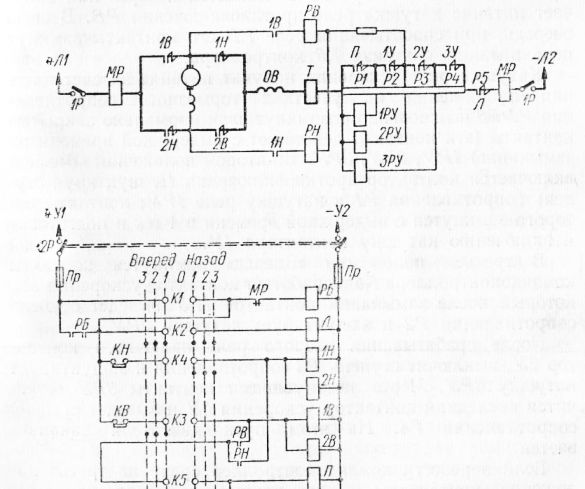
Рис. 6. Схема магнитного контроллера типа П
Проследим работу контроллера во всех его положениях. В нулевом положении двигатель отключен от сети. Реле нулевой блокировки РБ получает питание лишь после включения рубильников силовой 1Р и контрольной 2Р цепей, срабатывает и самоблокируется через свой нормально открытый контакт РБ, подавая этим самым напряжение в цепи управления.
В первом положении «Вперед» через контакт командоконтроллера К2 включается катушка линейного контактора Л, одновременно через контакт КЗ включаются катушки контакторов 1В и 2В, и двигатель включается в сеть при полностью введенном сопротивлении.
Контакты контактора 1В замыкаются и через них получает питание катушка реле противовключения РВ. В свою очередь, при срабатывании реле РВ его контакты замкнут цепь питания контакта К5 контроллера.
Катушки реле ускорения получат питание за счет падения напряжения на участках тормозного сопротивления Р1-РЗ и мгновенно разомкнут свои нормально закрытые контакты (эти контакты действуют с выдержкой времени на замыкание) 1РУ, 2РУ, ЗРУ. Во втором положении «Вперед» включается контактор противовключения П, шунтируя ступень сопротивления Р1 и катушку реле 1РУ, контакты которого замкнутся с выдержкой времени в 1 сек и подготовят к включению катушку контактора 1У.
В третьем положении «Вперед» замкнутся контакты командоконтроллера Кб и сработает контактор ускорения У, который после замыкания контактов 1РУ выведет ступень сопротивления Р2 и зашунтирует катушку 2РУ.
После срабатывания второго реле включится контактор 2У, выключит ступень РЗ сопротивления и зашунтирует катушку ЗРУ. Через замкнувшиеся контакты ЗРУ включится последний контактор ускорения ЗУ и выведет ступень сопротивления Р4. На этом пуск двигателя заканчивается.
Если перевести командоконтроллер сразу на третье положение, контакторы и реле начнут автоматически замыкаться в следующем порядке: 1В и 2В, РВ, П. Затем после выдержки времени 1 сек замкнутся контакты 1РУ и включится 1У. Далее последовательно и автоматически включаются контакты 2РУ и (с выдержкой времени 0,8 сек) 2У, ЗРУ и (с выдержкой времени около 0,5 сек) ЗУ, на чем и заканчивается запуск двигателя.
При необходимости быстрой остановки используется режим противовключения — командоконтроллер переводят в первое положение обратного хода. Двигатель получает питание через контакты контакторов 1Н и 2Н и, продолжая вращаться по инерции в направлении «Вперед», оказывается в режиме противовключения с полностью введенным сопротивлением в цепь якоря Р1-Р5, электродвижущая сила якоря в этом случае почти полностью уравновешивает напряжение сети и реле РН (или реле РВ, если движение происходило в обратном направлении) не сработает вплоть до полной остановки якоря.
Для управления двигателями подъема применяются магнитные контроллеры типа ПС.
Схема контроллера и соответствующая диаграмма замыканий приведена на рис. 134.
Контроллер имеет четыре ступени регулирования при работе двигателя на подъем и четыре при работе на спуск. Схема включения контакторов несимметрична и осуществляет различные режимы работы двигателя при установке рукоятки командоконтроллера в положение подъема или спуска.
Линейный контактор получает питание через контакты КЗ при подъеме и через К4 при спуске груза. Для ограничения подъема крюка выше допустимого предела служит конечный выключатель KB, контакты которого введены в цепь КЗ.
В первом и втором положениях рукоятки командоконтроллера при работе двигателя на подъем главная цепь двигателя шунтируется сопротивлением Р4 посредством нормально закрытого контакта 2Т, что дает возможность получить более глубокое регулирование скорости при подъеме, чем при простом реостатном шунтировании.
При подъеме груза сопротивления Р6 и Р7 шунтируются контактором 2М.
Во втором положении рукоятки командоконтроллера включается контактор 1У, который шунтирует сопротивление Р1 и замыкает цепь катушки реле ускорения РУ, а его контакт подготавливает к включению цепь катушки контактора 2У.
В третьем положении получает питание катушка контактора 2Т, вследствие чего отключается сопротивление Р4, шунтирующее главную цепь двигателя. При установке
рукоятки в четвертое положение последовательно включаются контакторы ускорения 2У и ЗУ.
При быстром переводе рукоятки командоконтроллера в четвертое положение реле ускорения РУ замкнет свой контакт, когда двигатель достигнет 60—70% своей номинальной
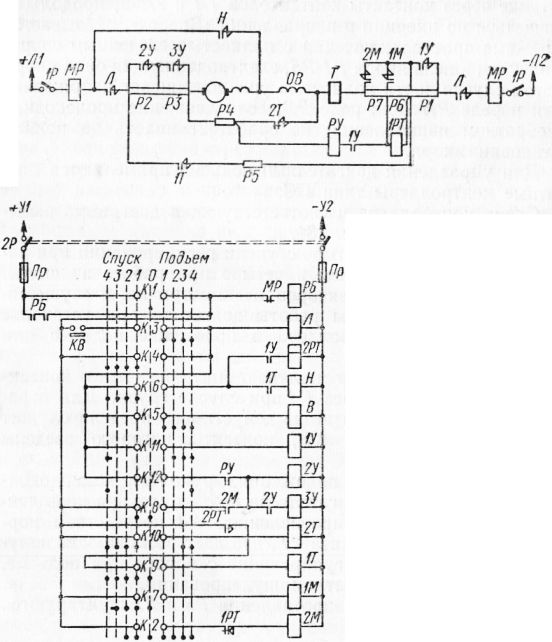
Рис. 7. Схема управления с магнитным контроллером типа ПС
скорости. Катушки контакторов 2У и ЗУ получат питание только после того, как замкнется контакт РУ.
Также будет работать реле РУ и при быстром переводе рукоятки командоконтроллера в четвертое положение при спуске груза.
При спуске груза в первом положении командоконтроллера включаются контакторы 1Т и Н. Блокировка катушки контактора Я нормально открытым контактом IT необходима для предотвращения свободного падения груза, так как при отключенном контакте 1Т и включенном Я двигатель не создаст тормозного момента, а тормозной электромагнит откроет тормоз.
При включенных контакторах IT и Я якорь двигателя и обмотка возбуждения будут включены параллельно, двигатель будет работать с более жесткой характеристикой, и поэтому скорость опускания груза будет ограничена.
При втором положении командоконтроллера откроется контакт К9, катушки контакторов ускорения 2У и ЗУ будут отключены, в цепь якоря будут введены сопротивления РЗ и Р2.
Увеличение сопротивления в цепи якоря приводит к уменьшению скорости в двигательном и возрастанию ее в генераторном режиме.
В третьем положении откроется контакт К12, отключится катушка контактора 2М, в цепь возбуждения будет введено сопротивление Р7, ток возбуждения машины уменьшится, скорость возрастет.
При переводе командоконтроллера в четвертое положение включатся контакторы ускорения 1У, 2У и ЗУ, которые за-шунтируют сопротивления PI, Р2 и РЗ цепи якоря. Контакт К7 откроется, катушка контактора 1М отключится и в цепь обмотки возбуждения будет введено сопротивление Р6, которое снизит величину тока возбуждения.
Остановка двигателя при спуске может быть сделана постепенным переводом командоконтроллера из четвертого положения в первое.
При необходимости быстрой остановки груза при спуске командоконтроллер сразу переводят в нулевое положение, при этом отключаются катушка контактора Я и реле 2РТ.
Якорь двигателя, его обмотка возбуждения и тормозной электромагнит отключаются от сети и замыкаются контактором 1Т на сопротивления Р2, РЗ, Р5 и Р7, машина будет работать в режиме генераторного торможения с самовозбуждением.
Через 0,4—0,6 сек сработает реле 1РТ, катушка которого шунтируется контактом 1М, и включит контактор 2М, закорачивающий сопротивление Р7.
После этого через 0,7—1,0 сек реле 2РТ откроет свой контакт в цепи контакторов 1T и 2Т.
Якорь двигателя с обмоткой возбуждения теперь будет замкнут на сопротивление Р4 и торможение усилится.
Двигатель в этом положении также работает в режиме генераторного торможения с самовозбуждением, но еще прибавляется тормозное усилие тормоза, так как его катушка отключена.
Магнитные контроллеры постоянного тока типа П и ПС рассчитаны только на электродвигатели и тормозные электромагниты последовательного возбуждения. При параллельном или смешанном возбуждении требуется специальное исполнение контроллеров.
Рекламные предложения:
Главная → Справочник → Статьи → Форум
Механизация земляных работ
Механизация строительства
Механизация дорожных работ
Автоматизация строительства
→ Бетонные работы
→ Мини-тракторы
 Разделы
Разделы
Строительные машины и оборудование
→ Для специальных земляных работ
→ Дорожно-строительные машины
→ Строительное оборудование
→ Асфальтоукладчики и катки
→ Большегрузные машины
→ Строительные машины, часть 2,
→ Дорожные машины, часть 2
→ Ремонтные машины
→ Ковшовые машины
→ Автогрейдеры
→ Экскаваторы
→ Бульдозеры
→ Скреперы
→ Грейдеры
Эксплуатация строительных машин
→ Эксплуатация средств механизации
→ Эксплуатация погрузочных машин
→ Эксплуатация паровых машин
→ Эксплуатация экскаваторов
→ Эксплуатация подъемников
→ Эксплуатация кранов перегружателей
→ Эксплуатация кузовов машин
→ Крановщикам и стропальщикам
Ремонт строительных машин
Ремонт дорожных машин
Ремонт лесозаготовительных машин
Ремонт автомобилей КАмаЗ
Техническое обслуживание автомобилей
Очистка автомобилей при ремонте
Материалы и шины
Остались вопросы по теме:
"Элементы электрических крановых схем постоянного тока"
— воспользуйтесь поиском.
→ Машины городского хозяйства
→ Естественная история машин
→ Транспортная психология
→ Пожарные автомобили
→ Автомобили-рефрижераторы
→ Монтаж и эксплуатация лифтов
→ Тракторы