Строй-Техника.ру
Строительные машины и оборудование, справочник
Захват является одним из основных элементов грузозахватных устройств и служит связующим звеном между его рабочим органом и грузом. Правильный выбор типа и конструкции захвата в значительной степени определяет производительность устройства, возможность механизации и автоматизации перегрузочных работ.
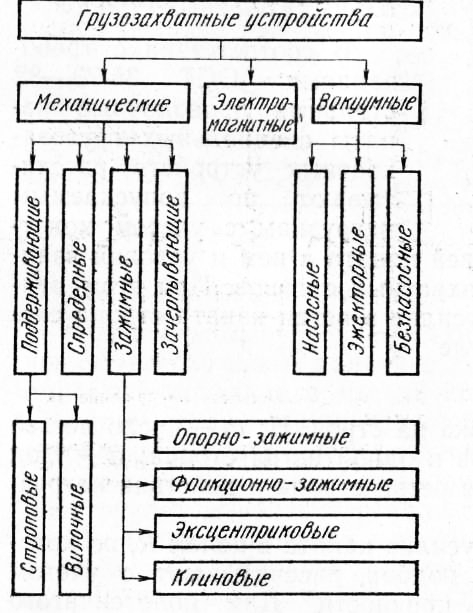
Общая классификация грузозахватных устройств по принципу действия и конструктивному исполнению захватных органов приведена на схеме.
Наиболее распространены механические захваты. Конструкция их проста, они надежны и удобны в эксплуатации при ручном управлении. При автоматическом управлении конструкция их усложняется, и в этом случае более эффективны электромагнитные и вакуумные захваты.
Рекламные предложения на основе ваших интересов:
Дополнительные материалы по теме:
Спредеры — рамные захваты для контейнеров по способу взаимодействия с грузом (подхватом) относятся к поддерживающим устройствам. Но конструкция их и механизмы настолько специфичны, что можно выделить их в отдельную группу механических захватов.
Захваты могут иметь ручное, дистанционное или автоматическое управление. Дистанционное управление обеспечивается специальными устройствами захватов, которыми управляет оператор с пульта. При автоматическом управлении захват груза обеспечивается только за счет перемещения самого грузозахватного устройства.
По назначению захваты выполняются универсальными и специализированными. Специализированные захваты при-способлень: для грузов с заданными параметрами (масса, габаритные размеры, форма), меняющимися в допускаемых пределах. Электромагнитные и вакуумные захваты в основном универсальны, но есть и специализированные: для труб, отдельных видов металлопроката, рифленого металла и др.
Статические и динамические нагрузки при работе захватов
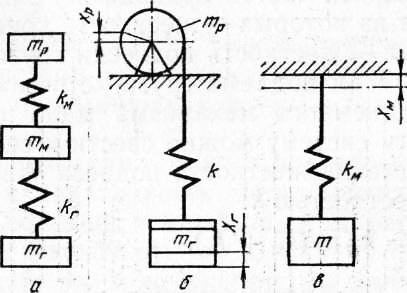
На грузозахватное устройство, удерживающее груз или перемещающееся по прямолинейному пути с постоянной скоростью, действует статическая нагрузка. При переменной скорости, в моменты отрыва груза от опорной поверхности и торможения, на грузозахват дополнительно действует динамическая нагрузка.
Статическая нагрузка FCT зависит от массы груза тг и собственной массы захвата т3. (при вертикальном подъеме). Это условие действительно только для случая, когда центр тяжести груза совпадает с вертикальной осью подвеса. Если это условие не соблюдается, то при гибком подвесе захват с грузом поворачивается относительно оси подвеса на угол а.
Для электромагнитных и вакуумных захватов кроме коэффициента запаса по прочности необходимо учитывать коэффициент запаса по работоспособности.
Значения коэффициентов запаса назначаются для механических захватов 2—6, электромагнитных 2—3, вакуумных 2—8.
Рекламные предложения:
Главная → Справочник → Статьи → Форум
Механизация земляных работ
Механизация строительства
Механизация дорожных работ
Автоматизация строительства
→ Бетонные работы
→ Мини-тракторы
 Разделы
Разделы
Строительные машины и оборудование
→ Для специальных земляных работ
→ Дорожно-строительные машины
→ Строительное оборудование
→ Асфальтоукладчики и катки
→ Большегрузные машины
→ Строительные машины, часть 2,
→ Дорожные машины, часть 2
→ Ремонтные машины
→ Ковшовые машины
→ Автогрейдеры
→ Экскаваторы
→ Бульдозеры
→ Скреперы
→ Грейдеры
Эксплуатация строительных машин
→ Эксплуатация средств механизации
→ Эксплуатация погрузочных машин
→ Эксплуатация паровых машин
→ Эксплуатация экскаваторов
→ Эксплуатация подъемников
→ Эксплуатация кранов перегружателей
→ Эксплуатация кузовов машин
→ Крановщикам и стропальщикам
Ремонт строительных машин
Ремонт дорожных машин
Ремонт лесозаготовительных машин
Ремонт автомобилей КАмаЗ
Техническое обслуживание автомобилей
Очистка автомобилей при ремонте
Материалы и шины
Остались вопросы по теме:
"Классификация грузозахватных устройств"
— воспользуйтесь поиском.
→ Машины городского хозяйства
→ Естественная история машин
→ Транспортная психология
→ Пожарные автомобили
→ Автомобили-рефрижераторы
→ Монтаж и эксплуатация лифтов
→ Тракторы