Строй-Техника.ру
Строительные машины и оборудование, справочник
Применение дистанционной и автоматической зацепки и отцепки крюков стропов повышает эффективность управления крановым оборудованием и производительность труда такелажников и стропальщиков, обеспечивает безопасность производства стропальных работ. В простых устройствах этого типа крюк поворачивается при помощи рычага или канатика при ослабленном натяжении стропов.
Универсальное грузозахватное устройство с дистанционным управлением отцепкой крюков состоит из подвески, прикрепленных к ней через кольца обойм с блоками, ветвей стропов и уравнительных канатов. Стропы на свободных концах оборудованы грузовыми крюками с обоймами, перекрывающими зев крюка и снабженными тягами, которые осуществляют поворот крюка. Конструкция подвески позволяет воспринимать односторонние нагрузки за счет возможности ее поворота относительно крюка монтажного крана в вертикальной плоскости, а наличие колец обеспечивает поворот относительно вертикальной оси обоймы в пределах 120°. Грузоподъемность устройства 10 т, масса 195 кг.
Грузозахватное устройство ЗСП-ЗА для строповки и дистанционной расстроповки строительных конструкций, технологического оборудования и других грузов состоит из обоймы, специального крюка, установленного в обойме на пальце рукоятки с фиксатором, пружины растяжения, распорной пружины, опирающейся на тарелки, и направляющего стержня с вилкой. На консоли рычага, жестко связанного с крюком, имеются отверстия для закрепления рычага. Один конец рукоятки, выполненный в виде вилки, охватывает рычаг, а другой кольцом соединяется с расстроповочным шнуром. Рукоять может поворачиваться на рычаге вокруг оси отверстия на 135°, при этом фиксатор, входя в зацепление с любым из четырех пазов на рычаге, надежно фиксирует ее положение. В верхней части грузозахватного устройства вставлен палец для соединения его со стропом грузоподъемного механизма.
Рекламные предложения на основе ваших интересов:
Дополнительные материалы по теме:
Зев перекрывается рогом крюка и под действием пружины постоянно замкнут. Он раскрывается при повороте рукояти непосредственно рукой или натяжением расстро-побочного шнура. Скоба на обойме обеспечивает оптимальный угол между расстроповочным шнуром и рукоятью при ее горизонтальном положении.
Груз стропят, непосредственно зацепляя крюком за монтажные петли, или при помощи дополнительных кольцевых стропов обвязкой «на удав». Перед подъемом груза рукоять устанавливают так, чтобы при дистанционном раскрытии грузозахватного устройства угол между натянутым расстроповочным шнуром и рукоятью достигал 90°. Когда соблюдение этого условия невозможно, рукоять устанавливают в горизонтальное положение, а расстроповочный шнур пропускают через скобу. Для изменения положения рукоятки ее оттягивают до выхода фиксатора из зацепления с пазом на рычаге крюка, устанавливают в требуемое положение и фиксируют.
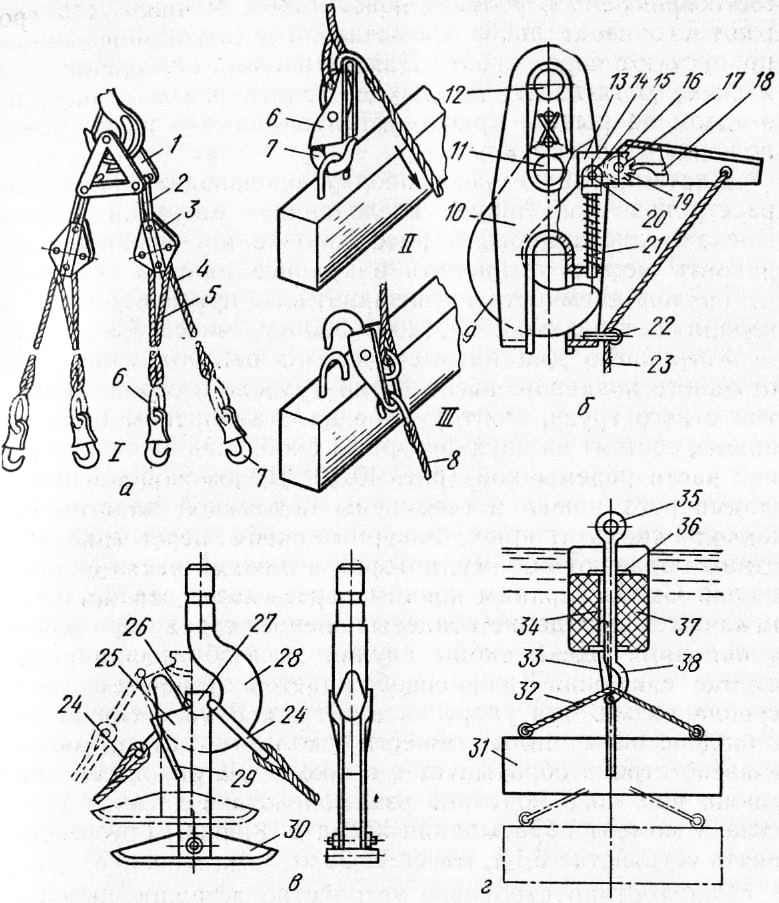
Дистанционную расстроповку производят натяжением расстроповочного шнура после снятия нагрузки с крюка. Когда в дистанционной расстроповке нет необходимости, рукоять можно установить в крайнее нижнее положение.
Грузоподъемность грузозахватного приспособления 3 т, габаритные размеры 70X200X320 мм, масса 7,5 кг.
Устройство для автоматического освобождения крюка от одного концевого звена петли грузового стропа при снятии с него груза, монтируемое на стандартном однорогом крюке, состоит из двухчфигурных скоб, соединенных в верхней части перемычкой. Щеки скоб выгнуты по форме рога крюка и соединены наклонной пластиной, по которой скользит крюк. Фигурные скобы, перемычка и пластины образуют обойму, которая в нижней части снабжена пятой. Скоба верхним концом перекрывает зев крюка, что исключает выпадение концевых звеньев стропа при рабочем положении. Щека скобы служит для сбрасывания звена стропа с крюка. Крюк освобождается от петли грузового стропа только при упоре пяты в груз. В этом случае крюк под действием силы тяжести скользит внутри обоймы, и звено стропа сбрасывается с крюка. Штриховыми линиями на рис. 1, в показано взаимодействие деталей устройства в момент сбрасывания звена с крюка. Грузоподъемность устройства 5,1 т, масса 15,22 кг.
Разработано строповое устройство для автоматической расстроповки груза при погружении его в воду. Оно имеет крюк (рис. 1, г), выполненный в Виде стебля, и шарнирно соединенный с ним рычаг. Стебель снабжен рым-болтом. На стебель и рычаг свободно надет поплавок, обладающий плавучестью. Во внутреннем отверстии поплавка при помощи фланцев вмонтирована трубка. Стебель и рычаг связаны с грузом при помощи стропа.
Устройство работает следующим образом. Для закрепления груза на грузозахватном устройстве, связанном с судоремонтным подъемным средством рым-болтом, стропы заводят на плечо стебля крюка, поворачивают рычаг вверх до контакта со стеблем, после чего поплавок опускают по стеблю, что обеспечивает фиксирование рычага при помощи трубы в закрытом положении. Поднятый судовым грузоподъемным средством груз выносят за борт и опускают в воду. При погружении под воду поплавок в результате плавучести поднимается по стеблю и освобождает рычаг, который под действием стропов откидывается вниз и освобождает последний вместе с грузом.
К штырьево-строповочным (рис. 2) относят грузозахватные устройства, в которых для захвата груза используют тросовый строп, а штырьевое устройство (штырьевой замок) служит вспомогательным приспособлением для удобной расстроповки груза на расстоянии, например на высоте. Замок представляет собой каркас, в котором закреплены валик и подвижный штырь. Строп заякоривается в штырь-евом устройстве за валик, а после застроповки поднимаемого груза огибает штырь и свободной петлей навешивается на крюк крана (рис. 2, а). После установки груза на место и ослабления стропа штырь выдергивается и грузозахватное устройство освобождается.
В упрощенной модели (рис. 2, б) петля стропа пропущена через отверстия каркаса и надета на штырь, последний в связи с этим выполняет функции валика и штырьевого устройства.
Штырьевые замки выполняют различной конфигурации (рис. 2, б). Штырьевой замок с каркасом выполнен в виде скобы с вваренной перепонкой. Штырь связан с пружиной, удерживающей его в скобе. Для освобождения стропов штырь, преодолевая сопротивление пружины, канатом вытягивается из одной стороны дуговрго каркаса; после ослабления троса штырь пружиной подается в каркас.
Известно аналогичное штырьевое устройство, в котором штырь совмещен с заякоривающим валиком (рис. 2, г). Так как на штырь действует остаточное натяжение стропа и частично масса грузозахватного устройства, при вытягивании его приходится преодолевать силу трения, возникающую между стропом, штырем и гнездом, по которому он перемещается. Эта сила довольно велика, в связи с чем вытягивать штырь трудно.
В другом штырьевом устройстве (рис. 2, е) процесс вытягивания канатика облегчен за счет того, что штырь снабжен винтовым хвостовиком, взаимодействующим с вращаемой гайкой-барабаном, на которую навит управляющий канатик. При натяжении канатика гайка-барабан вращается, а винт поступательно перемещается, так как вращению его препятствует шпонка, входящая в паз валика. Устройство применяют при подъеме стальных, железобетонных конструкций и технологического оборудования.
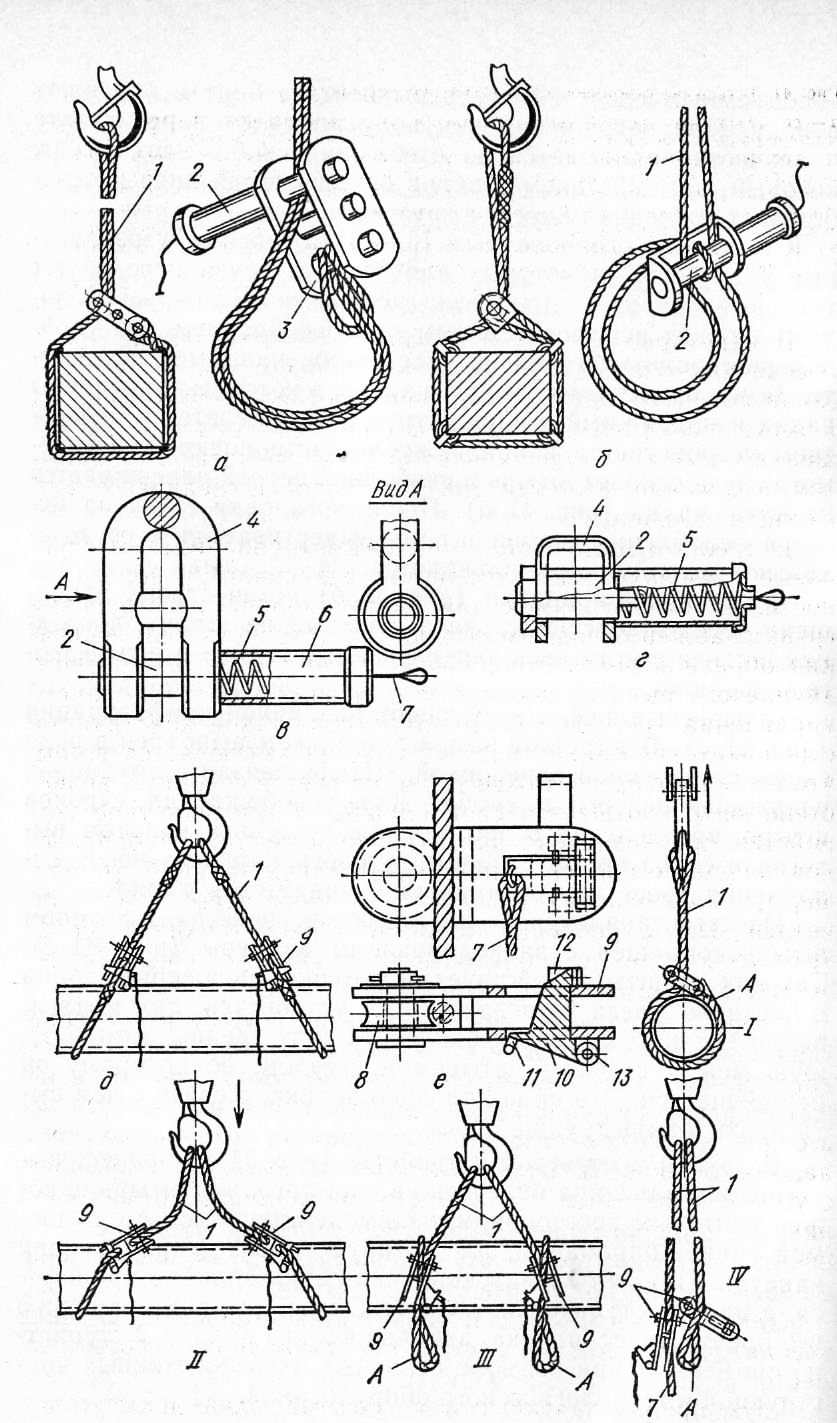
В некоторых устройствах (рис. 2) вытягивание троса обеспечивается под любым углом в пространстве при помощи поворотного приспособления, которое установлено на кожухе замка на шарикоподшипниках. Пружина, размещенная в кожухе, удерживает подвижный штырь в закрытом положении. Канатик для расстроповки соединен с подвижным пальцем.
В тресте «Востокметаллургмонтаж» разработаны строповые грузозахватные устройства различной грузоподъемности, в которых замок для дистанционной расстроповки груза снабжен отводным роликом, а устройство для фиксации обратной ветви стропа выполнено в виде поворотного двуплечего рычага, связанного с тросиком дистанционного управления. Преимущество такой конструкции стропового грузозахватного устройства заключается в том, что его канат при затяжке груза не трется о корпус, вследствие чего повышается срок службы. Грузозахватное устройство предназначено для строповки секций трубопроводов, крупных блоков, длинномерных конструкций (балок, ферм), монтируемых на высоте и увязываемых мертвой петлей. Для закрепления поднимаемой конструкции используют двухпетлевые (облегченные) и универсальные (кольцевые) стальные стропы.
Строп для подъема груза состоит из собственно стропа и дистанционно управляемого замка, выполненного в виде корпуса из двух соединенных между собой щек. Внутри щек с одной стороны установлен на оси отводный ролик, а с другой — устройство для фиксации обратной ветви стропа, выполненное в виде поворотного двуплечего рычага с ушком, связанным с канатиком дистанционного управления. На одной из щек замка расположена пружинная защелка, а на другой — ось рычага, которая размещена в плоскости мертвой петли.
Для сборки стропа с замком ролик вынимают из щек, заводят строп между щеками и устанавливают ролик на место.
Груз, предназначенный для подъема, охватывают стропом, подвешенным петлей на крюк крана, поворотом двуплечего рычага вокруг оси освобождают пространство между щеками, в которое вводят петлю А обратной ветви стропа. Поворачивают двуплечий рычаг внутрь петли стропа и щек до фиксации ее пружинной защелкой. Движением крюка вверх затягивают строп вокруг груза мертвой петлей. При затягивании стропа ролик вращается на оси, что обеспечивает равномерное, без рывков, натяжение стропа и надежное замыкание двуплечего рычага. Когда груз установлен на место и закреплен, опускают крюк, ослабляя натяжение стропа, натяжением канатика размыкают замок. После отстроповки замок повисает (удерживается) на нижней петле А стропа. Строп готов к очередному подъему.
Строповое устройство грузоподъемностью 15 т отличается тем, что в его конструкции предусмотрены два ролика вместо одного.
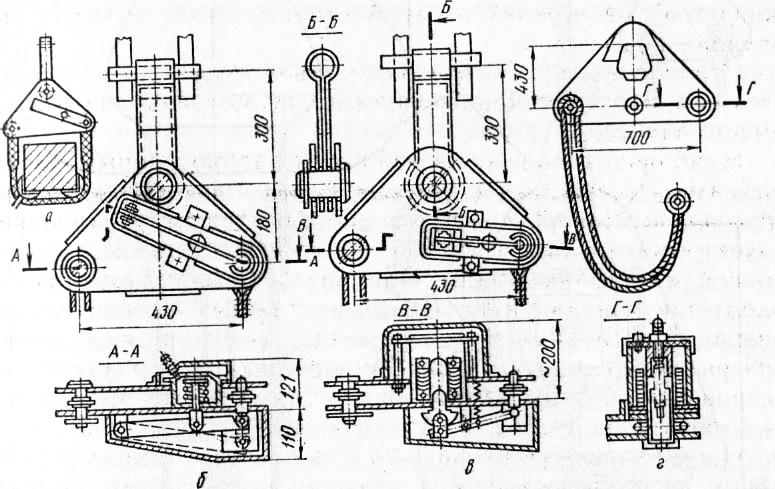
Наибольшее преимущество перед рассмотренными механизмами имеют штырьево-строповые механизированные грузозахватные устройства с дистанционным управлением (электромагнитным и пневматическим приводами) расстро-повкой из кабины крана. Они обеспечивают безопасность работ при монтаже и ускорение монтажных и строительных операций. Основные типы применяемых в настоящее время штырьево-строповых механизированных грузозахватных устройств показаны на рис. 3. Общая схема строповки груза показана на рис. 3, а.
Представленные на рис. 3, б, в грузозахватные устройства грузоподъемностью 10 т идентичны и отличаются только приводом для вытягивания штыря. В конструкции, изображенной на рис. 3, б, привод рычажно-пневматиче-ский при давлении воздуха 0,3 МПа. В качестве пневмотолкателя использована тормозная камера автомобиля. Масса грузозахватного устройства 45 кг. В конструкции, показанной на рис. 3, в, привод рычажно-электрический при напряжении переменного тока 36 В. В качестве толкателя применен тормозной магнит типа КМТ-101, но можно использовать и любой другой магнит аналогичной характеристики. Масса грузозахватных устройств 55 кг. Грузозахватные устройства с безрычажным электромагнитным приводом имеют грузоподъемность 20 т. Штырь постоянно замкнут пружиной.
Для его оттягивания используется непосредственно электромагнит, питаемый переменным или постоянным током.
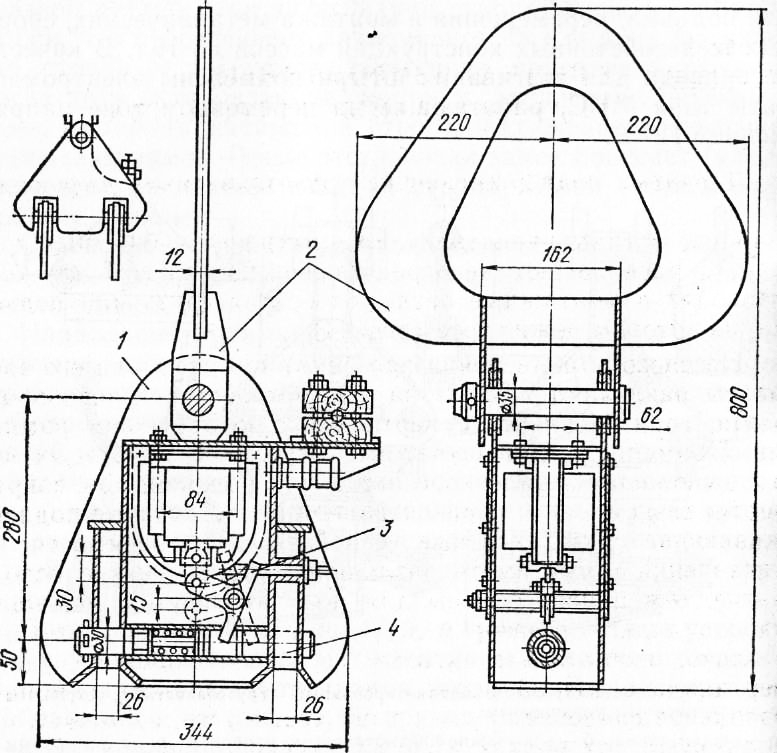
Основное отличие их от рассмотренных заключается в том, что при помощи грузозахватных устройств можно лучше направлять штырь, удлинив опорную втулку. Такие грузозахватные устройства предназначены для подъема, перемещения и монтажа металлических, сборных железобетонных конструкций массой до 16 т. В качестве привода для втягивания штыря применены электромагниты типа МИС, работающие на переменном токе напряжением 127 В.
Грузозахватные устройства (рис. 4) состоят из корпуса, серьги, магнитного привода, рычага, рукоятки, запорного штыря, электрооснастки и одноветвевого стропа с коушами. Корпус — это сварная конструкция из листовой стали. Запорный штырь состоит из штыря, цилиндра и пружины.
При застропке груза стропом охватывается наружный элемент конструкции, и свободный конец стропа надевается на выдвижную часть штыря. В открытом состоянии штырь Удерживается магнитом, в закрытом — пружиной.
Расстроповка конструкции осуществляется подвижным штырем механически при помощи магнитного привода посредством кнопочного управления из кабины крана или вручную рукояткой.
Все штырьево-строповые грузозахватные устройства с пневматическим и электромагнитным приводами управляются дистанционно крановщиком из кабины крана. Для предотвращения случайного включения в цепи катушки магнитного пускателя последовательно с кнопкой установлен выключатель, который необходимо включать непосредственно перед нажатием кнопки и после растроповки снова отключать. Третья жила питающего кабеля предназначена для заземления. Один конец ее должен быть подключен к корпусу грузозахватного устройства, другой — к металлическим конструкциям крана. При применении траверсы с двумя грузозахватными устройствами на ней устанавливают клеммный ящик, к которому присоединяют кабель от обоих устройств.
Рекламные предложения:
Главная → Справочник → Статьи → Форум
Механизация земляных работ
Механизация строительства
Механизация дорожных работ
Автоматизация строительства
→ Бетонные работы
→ Мини-тракторы
 Разделы
Разделы
Строительные машины и оборудование
→ Для специальных земляных работ
→ Дорожно-строительные машины
→ Строительное оборудование
→ Асфальтоукладчики и катки
→ Большегрузные машины
→ Строительные машины, часть 2,
→ Дорожные машины, часть 2
→ Ремонтные машины
→ Ковшовые машины
→ Автогрейдеры
→ Экскаваторы
→ Бульдозеры
→ Скреперы
→ Грейдеры
Эксплуатация строительных машин
→ Эксплуатация средств механизации
→ Эксплуатация погрузочных машин
→ Эксплуатация паровых машин
→ Эксплуатация экскаваторов
→ Эксплуатация подъемников
→ Эксплуатация кранов перегружателей
→ Эксплуатация кузовов машин
→ Крановщикам и стропальщикам
Ремонт строительных машин
Ремонт дорожных машин
Ремонт лесозаготовительных машин
Ремонт автомобилей КАмаЗ
Техническое обслуживание автомобилей
Очистка автомобилей при ремонте
Материалы и шины
Остались вопросы по теме:
"Строповые грузозахватные приспособления с дистанционным и автоматическим управлением"
— воспользуйтесь поиском.
→ Машины городского хозяйства
→ Естественная история машин
→ Транспортная психология
→ Пожарные автомобили
→ Автомобили-рефрижераторы
→ Монтаж и эксплуатация лифтов
→ Тракторы