Строй-Техника.ру
Строительные машины и оборудование, справочник
Электродвигатели серии КПДН предназначены для привода крановых механизмов, электродвигатели серии МП и ДП — для привода крановых и вспомогательных металлургических механизмов, работающих в повторно-кратковременном режиме.
Электродвигатели изготовляются для номинальных напряжений 220 и 440 в. В установках с напряжением 500 в можно применять электродвигатели 440 в. В этом случае мощность и скорость вращения электродвигателя увеличиваются приблизительно пропорционально напряжению.
Электродвигатели исполняются:
а) последовательного возбуждения (сериесиые);
б) параллельного возбуждения (шунтовые);
в) смешанного возбуждения (компаундные) с приблизительно равным числом ампер-витков параллельной к последовательной обмоток при нагрузке, соответствующей ПВ= 25%.
Рекламные предложения на основе ваших интересов:
Дополнительные материалы по теме:
Параллельные обмотки электродвигателей на 440 в выполняются на 220 б; при включении их в сеть 440 в обмотки работают с постоянно включенным добавочным сопротивлением, которое должно быть заказано вместе с электродвигателем.
Параллельные обмотки электродвигателей рассчитаны на работу при ПВ = 100%, т. е. могут не отключаться во время пауз в работе электродвигателя.
Рассмотрим электромеханические свойства двигателей постоянного тока. Начнем рассмотрение с двигателя, имеющего параллельную обмотку возбуждения.
При включении двигателя в сеть по обмотке якоря и обмотке возбуждения пойдет ток, возникнет вращающий момент и якорь начнет вращаться.
По мере возрастания числа оборотов растет и индуктируемая в якоре противоэлектродвижущая сила (п. э. д. с.) Ея. Ведь якорь вращается в магнитном поле, создаваемом обмоткой возбуждения, и в его проводниках так же, как и в генераторе, возникает э. д. е., направленная против напряжения сети.
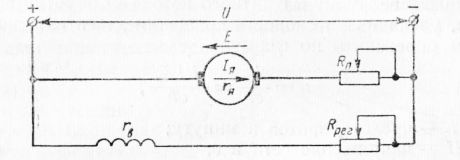
Рис. 1. Схема включения двигателя с параллельной обмоткой возбуждения
Бросок тока при непосредственном включении якоря в сеть превышает ток установившегося режима в 10—20 раз.
Продолжительность действия пускового тока мала, но такие значения тока недопустимы для двигателя. Кроме того, вращающий момент двигателя в это время (пусковой момент) окажется также настолько большим, что может привести к поломке механизма. Поэтому пуск в ход двигателя постоянного тока непосредственным включением в сеть допускается только для двигателей мощностью не более 0,5 кет.
Для уменьшения пускового тока и вращающего момента до допустимых величин последовательно с якорем включают пусковое сопротивление Rn, тогда пусковой ток снижается до допустимого значения, обычно до значения не более 2,5-кратного номинального тока.
По мере разгона электродвигателя и увеличения п. э. д. с. пусковое сопротивление уменьшают, постепенно выводя одну его секцию за другой.
Отсюда сделаем вывод, что при дальнейшем уменьшении магнитного потока обмотки возбуждения скорость двигателя может превысить все допустимые значения и машина будет подвергаться опасности «разноса» якоря центробежными силами. Вследствие этого в обмотку параллельного возбуждения двигателя постоянного тока нельзя ставить какие-либо предохранители или автоматы для защиты обмотки от повышения тока. Аппараты управления двигателем должны быть так устроены, чтобы сначала включалась обмотка возбуждения, а потом — якорь. При остановке машины должен сначала отключаться якорь, а потом — обмотка возбуждения.
Регулирование скорости вращения двигателя может производиться несколькими способами.
Один из них — это регулирование скорости реостатом (сопротивлением), включенным последовательно с якорем. С увеличением введенного сопротивления г, скорость якоря снижается.
Часть энергии при этом идет на нагрев регулировочного реостата.
Этот способ широко применяется для крановых двигателей, а регулировочные реостаты рассчитываются на длительный режим работы.
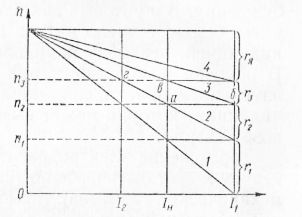
Рис. 2. Механические характеристики (1, 2, 3, 4) двигателя с различными сопротивлениями
Этот способ регулирования очень простой, но имеет недостаток: большие потери энергии в реостате, которая переходит в тепло и нагревает помещение. Реостат имеет значительные размеры при больших токах. Имеет значение также уменьшение жесткости механической характеристики и устойчивости работы двигателя.
Второй способ регулирования скорости вращения шунто-вого двигателя — регулирование магнитного потока возбуждения. Для этого последовательно с обмоткой возбуждения вводят регулировочный реостат, который уменьшает ток обмотки возбуждения и, следовательно, магнитный поток.
Таким образом, магнитный поток возбуждения можно только уменьшать, а число оборотов двигателя будет только увеличиваться.
Этот способ регулирования скорости является одним из наиболее экономичных из-за малых потерь энергии в реостате и возможности получать плавное регулирование скорости в довольно широких пределах.
Однако надо заметить, что при очень значительном уменьшении тока возбуждения двигатель будет работать неустойчиво, особенно при резких измерениях нагрузки.
Реверсирование двигателей постоянного тока производится переменой направления тока в якоре или в обмотке возбуждения. В шунтовых двигателях, где обмотка возбуждения имеет большое число витков и обладает значительной самоиндукцией, перемену направления тока производят в якоре. В обмотке возбуждения при быстром разрыве цепи перед изменением направления тока в ней возникает э. д. с. самоиндукции, которая может вызвать пробой изоляции обмотки возбуждения.
Торможение электродвигателей с параллельным возбуждением может быть сделано тремя способами (без применения механических тормозов): торможение с рекуперацией энергии, т. е. с отдачей энергии в сеть; динамическое торможение и торможение противовключением.
Торможение с рекуперацией энергии можно применять, когда механизм сообщает двигателю скорость выше скорости холостого хода. Э. д. с. якоря возрастает и становится больше напряжения сети, ток меняет свое направление и двигатель переходит в генераторный режим.
Переход двигателя в генераторный режим, режим динамического торможения и режим торможения с рекуперацией энергии удобно проследить по механическим характеристикам.
Для этого плоскость чертежа разобьем двумя осями — горизонтальной и вертикальной на четыре квадранта, в которых и будем производить построения характеристик.
По горизонтальной оси отложены значения вращающего момента двигателя — положительные для двигательного режима и отрицательные — для тормозного.
По вертикальной оси отложены значения скорости двигателя, причем за положительную скорость принято вращение двигателя по часовой стрелке, а за отрицательную — против часовой стрелки.
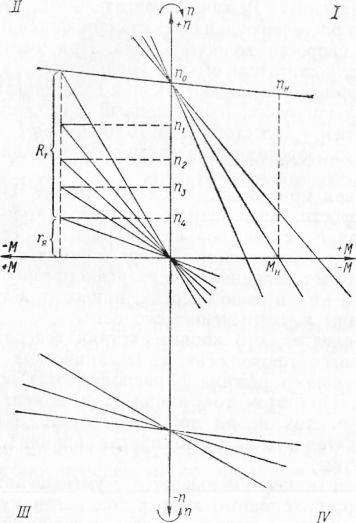
Рис. 3. Механические характеристики двигателя с параллельным возбуждением для двигательного и тормозного режимов
Рассмотрим случай динамического торможения, когда вращение происходит против часовой стрелки, например при спуске груза. Если двигатель перед спуском был неподвижен, то тормозные характеристики расположатся в IV квадранте. Наименьшая скорость спуска будет на естественной характеристике, так как при замкнутом накоротко якоре даже при небольшой э. д. с. протекает значительный тормозной ток. По мере разгона двигателя вследствие увеличения э. д. с. будет увеличиваться ток и тормозной момент. Скорость спуска будет тем больше, чем больше тормозное сопротивление RT включено в цепь якоря.
Торможение противовклю-чением состоит в том, что электродвигатель включают для вращения в сторону, обратную вращению механизма, например при спуске груза под действием собственного веса. Этот режим применяется для быстрой остановки груза и для получения установившейся скорости спуска груза.
Рассмотрим этот процесс: падающий груз уже развернул механизм и двигатель, после этого включаем двигатель па подъем, но он еще продолжает вращаться в сторону спуска, хотя ток стремится повернуть его на подъем.
Этот ток будет превышать номинальный ток якоря, возникнет резкий толчок, режим противовключения является тяжелым для двигателя. Сопротивление секции противовключения реостата Rm.np должно быть примерно равно сопротивлению пусковой секции Rn.
Механические характеристики двигателя в режиме противовключения проходят через начало координат в точке, где скорость двигателя равна нулю, следовательно, двигатель полностью остановится, но если его в это мгновение не отключить от сети, он теперь начнет вращаться в сторону подъема.
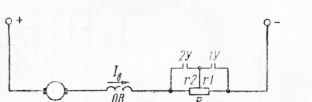
Рис. 4. Схема включения двигателя с последовательной обмоткой возбуждения
Пуск в ход двигателя с последовательной обмоткой возбуждения (сериес-двигатель) необходимо производить с включенным в цепь якоря пусковым сопротивлением. На рис. 69 представлена схема этого двигателя и по мере увеличения скорости секции реостата отключаются или закорачиваются при помощи контакторов ускорения 1У, 2У.
Поскольку обмотка возбуждения и якорь соединены последовательно, ток в них один и тот же, равный полному току из сети. Двигатель нельзя включать вхолостую, так как при этом ток в обмотке, а следовательно, и магнитный поток мал, п. э. д. с. якоря всегда будет стремиться достигнуть значения напряжения сети и якорь при холостом ходе пойдет «вразнос», достигнет скорости, опасной для него.
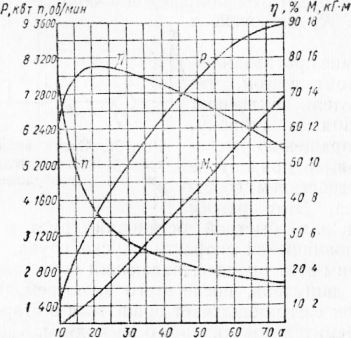
Рис. 5. Характеристики двигателя КПДН-2У
Поэтому двигатели с последовательной обмоткой возбуждения всегда соединяют с механизмами жесткой передачей — зубчатой или червячной: Такой двигатель не имеет скорости холостого хода, как двигатель с параллельной обмоткой возбуждения.
Двигатели с последовательным соединением обмотки возбуждения обладают большим пусковым моментом, чем двигатели шунтовые, поэтому они применяются там, где требуется большое усилие при начале движения: мостовые краны, трамвай, электрокары.
Механические характеристики двигателя КПДН-2у представлены на рис. 5.
Регулирование скорости и реверс двигателя с последовательной обмоткой возбуждения можно выполнить несколькими способами.
На рис. 6 представлены схемы этих способов.
Первый способ — в цепь якоря включено сопротивление. Такой способ регулирования применяется для передвижения моста, тележки и для уменьшения скорости двигателя.
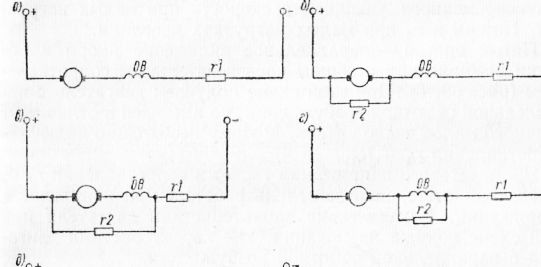
Рис. 6. Схемы регулирования скорости двигателя с последовательной обмоткой возбуждения
В реостате часть напряжения гасится, на двигатель попадает напряжение меньше сетевого, т. е. машина работает при искусственно пониженном напряжении за счет увеличения потерь в реостате.
Второй способ — шунтирование якоря двигателя сопротивлением. В этом случае по обмотке возбуждения пройдет, кроме тока якоря, еще дополнительный ток, определяемый величиной сопротивления и магнитный поток обмотки возбуждения увеличивается, вследствие чего скорость вращения якоря уменьшается.
Заметим, что в этой схеме ток через обмотку протекает даже при холостом ходе машины, но разноса якоря не произойдет, так как через обмотку возбуждения проходит ток и создается определенный магнитный поток.
Часть сетевого напряжения гаснет в сопротивлении гг и, в конечном счете, наш двигатель работает при пониженном напряжении. Механические характеристики двигателя при этой схеме похожи на механические характеристики двигателя с параллельной обмоткой возбуждения.
Схема применяется для спуска грузов при малых и больших скоростях. Реверс двигателя с последовательной обмоткой возбуждения производится так же, как и у двигателя с параллельной обмоткой возбуждения — изменяется направление тока в якоре. Обмотка возбуждения здесь имеет малое число витков и незначительную индуктивность, однако ее переключение для реверса может перемагнитить двигатель.
Торможение двигателей с последовательной обмоткой возбуждения может быть:
1. Торможение противовключением. В этом режиме якорь по инерции вращается в том же направлении, что и при двигательном режиме, следовательно, э. д. с. якоря и сети будут действовать согласно и ток может достигнуть опасных пределов, поэтому для ограничения тока необходимо последовательно с якорем включать ступень сопротивления с таким расчетом, чтобы ток противовключения не превышал пусковой ток. Способ торможения противовключением широко применяется для крановых механизмов.
2. Динамическое при независимом возбуждении, если вращающийся якорь отключить от сети, замкнуть на тормозное сопротивление. Сопротивление ставится такое, чтобы при динамическом торможении через обмотку возбуждения протекал номинальный ток.
3. Динамическое при самовозбуждении — способ применяется для подъемных механизмов.
На схеме двигатель работает на подъем, а на схеме — в режиме динамического торможения.
Конечными выключателями якорь двигателя включается последовательно с обмоткой возбуждения, но концы обмотки меняются для того, чтобы направление тока в ней осталось прежним. Ведь при переходе двигателя в генераторный режим э. д. с. якоря (а она всегда направлена против напряжения сети) создаст ток противоположного направления. В этой схеме меняется направление тока только в якоре, что требуется для реверса машины. Конечный выключатель установлен в цепи главного тока и его контакты срабатывают при переходе крюка крайнего верхнего положения.
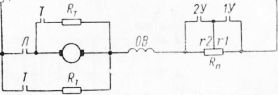
Рис. 8. Схема динамического торможения при независимом возбуждении
Динамическое торможение при самовозбуждении менее эффективно, чем при независимом возбуждении от сети, но зато оно применимо при исчезновении напряжения сети.
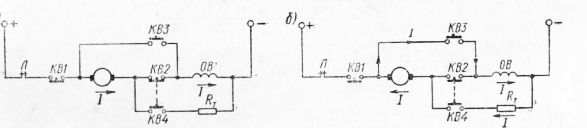
Рис. 9. Схема динамического торможения при самовозбуждении
Двигатели со смешанным возбуждением, имеющие две обмотки возбуждения, обладают промежуточными свойствами между двумя ранее рассмотренными двигателями, например: двигатель имеет на холостом ходу ограниченную скорость, нет опасности разноса (число оборотов холостого хода на 40—50% выше номинального числа оборотов при полной нагрузке). Механическая характеристика похожа на характеристику двигателя с последовательной обмоткой возбуждения, но отличается от нее, как сказано выше, пограничной скоростью холостого хода и меньшей крутизной.
Двигатель с увеличением нагрузки снижает скорость меньше только на 20—25%, чем двигатель сериесный, у которого при сбросе нагрузки скорость возрастала в два-три раза.
У двигателей серии МП магнитные потоки каждой обмотки равны при номинальном токе. На рис. 71 приведены средние естественные характеристики двигателей этой серии.
Пуск двигателя происходит при полном пусковом сопротивлении в цепи якоря. Для увеличения номинальной скорости двигателя замыкают накоротко последовательную обмотку возбуждения и двигатель теперь будет работать как шунтовой, хотя часть тока и будет протекать по замкнутой последовательной обмотке, потому что ее сопротивление соизмеримо с сопротивлением контактов ЗУ. Реверс машины также производится изменением направления тока в якоре. Регулирование скорости аналогично таковому для двигателя с последовательным возбуждением, но кроме этого можно закорачивать последовательную обмотку.
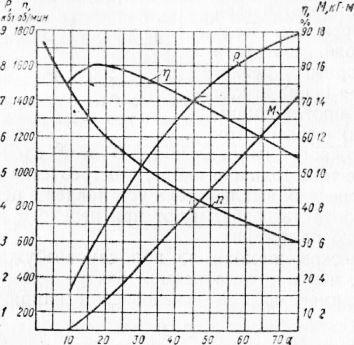
Рис. 10. Средние естественные характеристики двигателей серии МП
Применяются два способа торможения:
1) противовключением;
2) динамическое торможение.
При торможении контактор Л должен быть разомкнут, а контактор Т замкнут.
Сопротивление Rn выбирается такое, чтобы ток последовательной обмотки в режиме торможения был равен номинальному току двигателя.
Торможение по схеме значительно эффективнее, чем по схеме, но его схема сложнее и дороже.
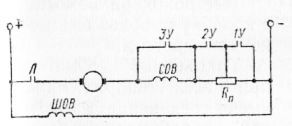
Рис. 11. Схема пуска двигателя смешанного возбуждения
—
Электродвигатели серии КПДН предназначены для привода крановых механизмв, электродвигатели серий МП и ДП — для привода крановых и вспомогательных металлургических механизмов, работающих в повторно-кратковременном режиме.
Электродвигатели рассчитаны на номинальное напряжение 220 и 440 В. В установках с напряжением 500 В можно применять электродвигатели с напряжением 440 В.
В этом случае мощность и частота вращения электродвигателя увеличиваются приблизительно пропорционально напряжению.
Электродвигатели исполняют: последовательного возбуждения (сериесные); параллельного возбуждения (шун-товые); смешанного возбуждения (компаундные) с приблизительно равным числом ампер-витков параллельной и последовательной обмоток при нагрузке, соответствующей ПВ = 25%.
Параллельные обмотки электродвигателей рассчитаны на напряжение 220 В. При включении их в сеть напряжением 440 В обмотки работают с постоянно включенным добавочным сопротивлением, которое должно быть заказано вместе с электродвигателем. Параллельные обмотки электродвигателей могут работать при ПВ = 100%, т. е. не отключаться во время пауз в работе электродвигателя.
Рассмотрим электромеханические свойства двигателя постоянного тока, имеющего параллельную обмотку возбуждения. При включении двигателя в сеть по обмотке якоря и обмотке возбуждения пойдет ток, возникает вращающий момент и якорь начнет вращаться. По мере возрастания частоты вращения растет индуктируемая в якоре противоэлектродвижущая сила Ею так как якорь вращается в магнитном поле, создаваемом обмоткой возбуждения, и ЭДС в его проводниках направлена против приложенного напряжения сети.
При пуске двигателя в ход, когда якорь еще не пришел в движение и Е = 0, начальный пусковой ток 4 = U/rn будет очень велик, так как сопротивление якоря всегда мало. Бросок тока при непосредственном включении якоря в сеть превышает ток установившегося режима в 10—20 раз.
Продолжительность действия пускового тока мала, но такие значения тока недопустимы для двигателя. Кроме того, вращающий момент двигателя (пусковой момент) окажется настолько большим, что может привести – к поломке механизма. В связи с этим пуск двигателя постоянного тока непосредственным включением в сеть допускается только при мощности его не более 0,5 кВт.
Рис. 1. Схема включения электродвигателя с параллельной обмоткой возбуждения
Для уменьшения пускового тока и вращающего момента последовательно с якорем включают пусковой резистор. Тогда пусковой ток снижается обычно до значения, не превышающего 2,5-кратный номинальный ток. По мере разгона электродвигателя и увеличения противо-электродвижущей силы пусковое сопротивление уменьшают, постепенно выводя одну его секцию за другой.
Магнитный поток обмотки возбуждения зависит от числа витков обмотки и тока, по ней протекающего, или от числа ампер-витков Число витков неизменно, следовательно, величину можно регулировать только изменением тока.
При дальнейшем уменьшении магнитного поля обмотки возбуждения частота вращения двигателя может превысить допустимые значения и машина подвергнется опасности «разноса» якоря центробежными силами. Вследствие этого в обмотку параллельного возбуждения двигателя постоянного тока нельзя ставить какие-либо предохранители или автоматы для защиты обмотки от повышения тока. Аппараты управления двигателем должны быть так устроены, чтобы сначала включалась обмотка возбуждения, а потом якорь. При остановке машины вначале должен отключаться якорь, а затем обмотка возбуждения.
Рис. 2. Механические характеристики 1—4 двигателя с различными сопротивлениями в цепи якоря
Частоту вращения двигателя можно регулировать несколькими способами.Один из них — регулирование частоты вращения реостатом, включенным последовательно с якорем. С увеличением сопротивления частота вращения якоря снижается. Часть энергии идет на нагрев регулировочного реостата. Для двигателей длительного режима такое регулирование не применяют из-за больших потерь в реостате. Этот способ широко распространен для крановых двигателей, а регулировочные реостаты рассчитаны на длительный режим работы.
Механические характеристики двигателя при любом значении сопротивления остаются прямолинейными. Чем больше сопротивление, тем круче падает характеристика.
Этот способ регулирования очень прост, но имеет недостатки: большие потери энергии в реостате, которые переходят в теплоту и нагревают помещение; значительные размеры реостата при больших токах. Кроме того, уменьшаются жесткость механической характеристики и устойчивость работы двигателя.
Существует способ регулирования частоты вращения шунтового двигателя изменением магнитного потока возбуждения. Для этого последовательно с обмоткой возбуждения вводят регулировочный реостат, который уменьшает ток обмотки возбуждения и, следовательно, магнитный поток. Таким образом, магнитный поток возбуждения можно только уменьшать, а частота вращения двигателя будет увеличиваться.
Этот способ регулирования является одним из наиболее экономичных из-за малых потерь энергии в реостате и возможности плавно регулировать частоту вращения в довольно широких пределах. Однако надо заметить, что при очень значительном уменьшении тока возбуждения двигатель будет работать неустойчиво, особенно при резких изменениях нагрузки.
Реверсирование двигателей постоянного тока производится переменой направления тока в якоре или обмотке возбуждения. В шунтовых двигателях, где обмотка возбуждения имеет большое число витков и обладает значительной самоиндукцией, перемену направления тока осуществляют в якоре. При быстром разрыве цепи перед изменением направления тока в обмотке возбуждения возникает ЭДС самоиндукции, которая может вызвать пробой ее изоляции.
Существуют три способа торможения электродвигателей с параллельным возбуждением (без применения механических тормозов); с рекуперацией энергии, т. е. с отдачей энергии в сеть; динамическое и противовклю-чением.
При тормозном режиме работы подводимая к электродвигателю механическая энергия превращается в электрическую, т. е. двигатель становится генератором. Возникающий при этом вращающий момент не совпадает с направлением вращения машины, и происходит ее торможение. Существует несколько способов электрического торможения, различающихся схемами включения и характеристиками. В одних случаях электрическая энергия, образующаяся при торможении, передается в питающую электросеть, т. е. происходит рекуперация энергии или частичное ее возвращение источнику тока, в других случаях она преобразуется в теплоту в резисторах и якоре.
Использование электрических способов торможения в электроприводах мостовых кранов вызывается спецификой их работы. Электрическое торможение облегчает работу механических тормозов, позволяет обеспечить устойчивые постоянные скорости спуска грузов и точную остановку механизмов.
Торможение с рекуперацией энергии можно применять, когда механизм сообщает двигателю частоту вращения, превышающую частоту вращения холостого хода. Электродвижущая сила якоря возрастает и становится больше напряжения сети, ток меняет направление, и двигатель переходит в генераторный (тормозной) режим.
Способ торможения с рекуперацией энергии выгоден: в сеть возвращается значительная часть затраченной энергии. Однако он приемлем лишь при частоте вращения, намного превышающей номинальную частоту вращения двигателя, и поэтому не всегда пригоден.
Переход двигателя в генераторный режим, режим динамического торможения и торможения с рекуперацией энергии удобно проследить по механическим характеристикам. Для этого плоскость чертежа разобьем двумя осями — горизонтальной и вертикальной — на четыре квадранта (рис. 4.4), в которых и будем производить построение характеристик.
По горизонтальной оси отложены вращающие моменты двигателя — положительные для двигательного режима и отрицательные для тормозного, а по вертикальной оси — частоты вращения двигателя, причем за положительную принята частота вращения двигателя по часовой стрелке, а за отрицательную — против часовой стрелки.
В квадрантах I и III расположены характеристики двигательного режима машины при вращении ее по часовой стрелке и в обратном направлении, в квадрантах II и IV — тормозные характеристики при вращении машины также по часовой стрелке и против часовой стрелки. Моменты для квадрантов I и III положительные, а для квадрантов II и IV отрицательные.
Участок естественной характеристики двигателя расположим в квадранте /. Режим двигательный. Это видно из того, что при росте нагрузки частота вращения снижается и становится меньше частоты вращения холостого хода.
Рис. 3. Механические характеристики двигателя с параллельным возбуждением для двигательного и тормозного режимов
При уменьшении нагрузки на валу ток двигателя уменьшается, а частота вращения и ЭДС якоря возрастают. Если к валу двигателя приложить момент нагрузки, направленный в сторону вращения и равный моменту холостого хода, то ток якоря будет равен нулю, а частота вращения — частоте вращения холостого хода: п = п0. Увеличивая приложенный к валу момент нагрузки, достигнем частоты вращения, превышающей частоту вращения холостого хода; ЭДС якоря станет больше напряжения сети U, и ток переменит направление. Теперь машина, отдавая энергию в сеть, будет превращать механическую энергию в электрическую, а это, в свою очередь, приведет к торможению якоря машины и уменьшению скорости.
Отсюда следует, что характеристики генераторного режима являются продолжением механических характеристик двигательного режима и располагаются в квадранте II или IV. При этом ток якоря и момент М отрицательны, т. е. ток из якоря поступает в сеть, а момент создается не двигателем, а по какой-то другой причине, например падающим грузом.
Тормозной момент снижается с уменьшением частоты вращения и при частоте вращения холостого хода п0 равен нулю. Следовательно, генераторное торможение неприемлемо для полной остановки механизма.
Динамическим торможением двигателя называется генераторный режим его работы, при котором механическая энергия преобразуется в электрическую и расходуется в замкнутом контуре, электрически не связанном с сетью, превращаясь в теплоту. Динамическое торможение можно получить, если якорь вращающегося двигателя отключить от сети, а обмотку возбуждения оставить включенной. Тогда в якоре, вращающемся в магнитном поле, будет индуктироваться ЭДС, двигатель перейдет в генераторный режим, но ток от якоря пойдет теперь на особый тормозной резистор R и создаст тормозной момент.
При динамическом торможении напряжение сети отключено от якоря, т. е. сети и частота вращения холостого хода п0 равны нулю, и характеристики пройдут через начало координат, т. е. можно получить торможение до полной остановки. Однако с уменьшением частоты вращения якоря снижаются его ЭДС, ток и тормозной момент. Для создания постоянного тормозного момента необходимо уменьшить в процессе торможения тормозное сопротивление в цепи якоря.
Из рис. 4.4 видно, что при включении тормозного сопротивления механическая характеристика в тормозном режиме проходит круто, а по мере уменьшения сопротивления становится более пологой. Торможение поддерживаем до тех пор, пока якорь не будет замкнут накоротко, а частота вращения двигателя не упадет до нуля и механизм не остановится. Способ динамического торможения обычно применяют для механизмов подъема и передвижения.
Рассмотрим случаи динамического торможения, когда вращение происходит против часовой стрелки, например при спуске груза. Если двигатель перед спуском был неподвижен, то тормозные характеристики расположатся в квадранте IV. Скорость спуска будет наименьшей на естественной характеристике, так как при замкнутом накоротко якоре даже при небольшой ЭДС протекает значительный тормозной ток. По мере разгона двигателя вследствие увеличения ЭДС возрастут ток и тормозной момент. Скорость спуска будет тем больше, чем большее тормозное сопротивление RT включено в цепь якоря.
Торможение противовключением состоит в том, что электродвигатель включают для вращения в сторону, обратную вращению механизма, например при спуске груза под действием собственной массы. Этот режим применяют для быстрой остановки груза и получения установившейся скорости спуска груза.
Рассмотрим этот процесс. Падающий груз уже развернул механизм и двигатель, после этого включаем двигатель на подъем, но он еще продолжает вращаться в сторону спуска, хотя ток стремится повернуть его на подъем.
Этот ток превысит номинальный ток якоря, и возникнет резкий толчок; режим противовключения является тяжелым для двигателя. Сопротивление секции противовключения реостата /?т.пр должно быть примерно равно сопротивлению пусковой секции Rn.
Механические характеристики двигателя в режиме противовключения проходят через начало координат (см. рис. 4.4) в точке, где частота вращения двигателя равна нулю; следовательно, двигатель полностью остановится. Но если его в этот момент не отключить от сети, он начнет вращаться в сторону подъема.
Электродвигатели постоянного тока с последовательной обмоткой возбуждения имеют существенное отличие от двигателей с параллельной обмоткой возбуждения, магнитный поток которых практически не зависит от нагрузки и является величиной постоянной, что и определяет жесткость характеристики.
Рис. 4. Схема включения двигагателя ПОСТОЯННОГО тока
По мере возрастания нагрузки магнитная цепь электродвигателя насыщается и квадратичная зависимость между моментом и током нарушается. Теоретически зависимость магнитного потока машины от тока якоря определить весьма затруднительно, поэтому для каждого типа машины последовательного возбуждения в каталогах приведены зависимости момента от тока якоря, полученные опытным путем на заводе-изготовителе.
Пуск двигателя с последовательной обмоткой возбуждения .необходимо производить, включая в цепь якоря пусковой резистор. По мере увеличения скорости секции реостата отключаются или закорачиваются при помощи контакторов ускорения. Двигатель с последовательным соединением обмотки обладает большим пусковым моментом, чем двигатель с параллельной обмоткой, поэтому его применяют, когда требуется большое усилие в начале движения.
Регулирование частоты вращения и реверс двигателя с последовательной обмоткой возбуждения можно выполнить несколькими способами.
Первый способ — включение в цепь якоря резистора — используют для передвижения моста и тележки. В реостате часть напряжения гасится, на двигатель попадает напряжение меньше сетевого, т. е. машина работает при искусственно пониженном напряжении за счет увеличения потерь в реостате.
Второй способ — шунтирование якоря двигателя сопротивлением R2. В этом случае по обмотке возбуждения LM пройдет кроме тока якоря еще дополнительный ток, определяемый сопротивлением R2, и магнитный поток обмотки возбуждения увеличится, вследствие чего частота вращения якоря уменьшится.
Заметим, что в этой схеме ток через обмотку протекает даже при холостом ходе машины, но разноса якоря не произойдет, так как через обмотку возбуждения проходит ток и создается определенный магнитный поток. Схема применяется для предварительного снижения частоты вращения двигателя перед остановкой и для спуска легких грузов в генераторном режиме. Потери энергии относительно велики.
Рис. 6. Схемы регулирования частоты вращения двигателя с последовательной обмоткой возбуждения
Третий способ — шунтирование якоря и обмотки возбуждения сопротивлением R2 при включенном последовательно сопротивлении R1. Четвертый способ — шунтирование обмотки возбуждения. При этом уменьшается ток в обмотке, снижается магнитный поток, а следовательно, возрастает частота вращения двигателя. Схема применяется для механизмов, требующих кратковременного увеличения частоты вращения при малых нагрузках. Потери сопротивления R2 при малых нагрузках невелики.
Пятый способ — параллельное включение якоря в обмотки возбуждения с общим последовательным сопротивлением. При этой схеме получаем двигатель с параллельной обмоткой возбуждения, но имеющий в отличие от обычного малое число витков, поэтому необходимо включать сопротивления R1 и Rn.
Часть сетевого напряжения гаснет в сопротивлении R1, и в конечном счете двигатель работает при пониженном напряжении. Механические характеристики двигателя при такой схеме схожи с механическими характеристиками двигателя с параллельной обмоткой возбуждения.
Рис. 7. Режим противовключения электродвигателя последовательного возбуждения при спуске груза
Схема применима для спуска грузов при малых и больших скоростях. Реверс двигателя с последовательной обмоткой возбуждения производится так же, как и реверс двигателя с параллельной обмоткой возбуждения, — изменяется направление тока в якоре. Обмотка возбуждения в данном случае имеет малое число витков и незначительную индуктивность, однако ее переключение для реверса может перемагнитить двигатель.
Из трех известных режимов торможения для двигателя последовательного включения применяют два: режимы противовключения и динамического торможения. Генераторный режим при обычной схеме включения двигателя невозможен, так как с уменьшением момента и тока в двигательном режиме, предшествующем генераторному режиму, магнитный поток полюсов снижается до нуля и машина увеличит частоту вращения до недопустимого значения.
Режим противовключения наиболее часто используют для убыстрения реверса или остановки электродвигателя, но применяют также и для торможения при спуске грузов, хотя при этом приходится включать значительное дополнительное сопротивление в цепь якоря, что увеличивает непроизводительные расходы электроэнергии.
Допустим, что электродвигатель механизма подъема крана работает устойчиво на подъем груза по естественной характеристике а и поднимает груз с постоянной скоростью. Когда груз, поднятый на необходимую высоту, потребуется опустить, в цепь якоря надо включить значительное дополнительное сопротивление R, вследствие чего электродвигатель перейдет на искусственную характеристику Ь. Здесь электродвигатель должен работать в режиме, соответствующем точке 2 на характеристике Ь, но работа будет неустойчи-
Рис. 8. Схема (а) и характеристики (б) электродвигателя последовательного возбуждения в режиме противо-включения
вой, так как развиваемый им вращающий момент меньше момента сопротивления. Частота вращения электродвигателя снизится и в точке 3 станет равной нулю, после чего электродвигатель под действием груза начнет вращаться в противоположную сторону, развивая тормозной момент.
Характеристики, соответствующие режиму противо-включения, располагаются в квадранте IV и являются продолжением характеристик двигательного режима.
На рис. 8 показана схема и даны характеристики электродвигателя, соответствующие режиму противовключения при реверсе и торможении. При замкнутых контактах К1 и К2 электродвигатель работает по естественной характеристике а, если замкнуты контакты К5 и Кб, а при разомкнутых контактах Кб — по характеристике b и разомкнутых контактах К5 — по характеристике с (по условию R2 > R1). При реверсе контакты К1 и К2 разомкнуты, а контакты КЗ и К4 замкнуты и двигатель работает по характеристикам а, Ь или с в зависимости от положения контактов К5 и Кб. В момент реверса контакты Кб должны быть открыты и в цепь электродвигателя вводится дополнительное сопротивление R2, чтобы уменьшить толчок тока. Если до этого электродвигатель работал по естественной характеристике а в точке 1, то при размыкании контактов Kl, K2 и Кб и замыкании контактов КЗ, К4 электродвигатель перейдет на работу, соответствующую точке 2 искусственной характеристики с, разовьет при этом значительный тормозной момент и его частота вращения резко уменьшится.
В точке 3 начинается разгон электродвигателя в противоположную сторону. В этот момент контакт Кб замыкается, а контакт К5 размыкается и в цепь якоря оказывается включенным сопротивление R1 вместо ранее включенного сопротивления R2, что уменьшает время разгона. Двигатель переходит на искусственную характеристику, и разгон в противоположную сторону начинается в точке 4.
Когда двигатель разовьет некоторую скорость, контакты К5 должны быть замкнуты, электродвигатель перейдет на естественную характеристику а и будет работать устойчиво в точке 7, соответствующей равенству момента сопротивления и вращающего момента, развиваемого им.
Этот способ торможения электродвигателей прост, не требует сложных переключений и часто применяется для механизмов мостовых кранов. Однако значительные толчки тока и момента, возникающие при переводе электродвигателя в режим противовключения, вызывают нарушение коммутации электродвигателя и его повышенный нагрев. В связи с этим в цепь якоря требуется вводить дополнительное сопротивление, вследствие чего увеличиваются потери электроэнергии и габариты аппаратуры управления. При необходимости быстрых остановок крановых механизмов режим противовключения является наиболее подходящим тормозным режимом. Недостаток режима противовключения — возможность случайного реверса после остановки механизма, если электродвигатель своевременно не будет отключен.
Режим динамического торможения сериесных электродвигателей имеет два варианта: при независимом возбуждении и самовозбуждении. При независимом возбуждении якорь двигателя отключают от сети и замыкают на сопротивление, а обмотку возбуждения оставляют включенной в сеть.
Для этого контакт К2 необходимо отключить, а контакты К1 и КЗ включить. Тогда якорь будет отключен от сети и замкнут на резистор динамического торможения, а обмотка возбуждения получит питание от сети через дополнительный резистор RB, сопротивление которого ограничивает ток в обмотке возбуждения до номинального значения.
Рис. 9. Схемы и характеристики электродвигателей последовательного возбуждения в режиме динамического торможения: а, в — при независимом возбуждении; б, г — при самовозбуждении
Так как обмотка возбуждения отключена от якоря, то магнитный поток электродвигателя постоянный и, как у двигателя с параллельным возбуждением, характеристики электродвигателя с последовательным возбуждением в режиме динамического торможения прямолинейные, проходят через начало координат и располагаются в квадрантах II и IV; наклон их определяется сопротивлением резистора. Чем выше это сопротивление, тем больше наклон. Такой способ можно применять как для быстрой остановки электродвигателя, так и для спуска грузов с устойчивой скоростью. Для перевода электродвигателя в режим динамического торможения с самовозбуждением контакты К2 и К4 размыкаются, а контакты К1 и КЗ замыкаются. Якорь и обмотка возбуждения отключаются от сети и замыкаются на сопротивление резистора Ra. Обмотку возбуждения соединяют с обмоткой якоря таким образом, чтобы ток через обмотку возбуждения протекал в ту же сторону, что и при двигательном режиме, иначе двигатель будет размагничен.
При работе электродвигателя в режиме динамического торможения с самовозбуждением ток и момент снижаются независимого возбуждения, в результате снижения магнитного потока, который зависит от частоты вращения якоря. При динамическом торможении одна часть кинетической энергии, запасенная в механизмах, расходуется на механическую работу, а другая часть преобразуется двигателем в электрическую энергию, которая затем превратится в теплоту в сопротивлениях замкнутого контура якоря. Преобладающее количество энергии выделяется во внешнем сопротивлении, которое всегда значительно больше сопротивления якоря.
Рис. 10. Средние естественные характеристики двигателей серии МП
Продолжительность торможения большинства механизмов кранов весьма незначительна, и поэтому вопрос экономии энергии для возбуждения не является существенным.
Двигатели со смешанным возбуждением, имеющие две обмотки возбуждения, обладают промежуточными свойствами по сравнению с двумя ранее рассмотренными двигателями, например: частота вращения на холостом ходу будет ограниченной, нет опасности разноса (частота вращения холостого хода на 40—50 % выше номинальной частоты вращения при полной нагрузке).
Механическая характеристика схожа с характеристикой двигателя с последовательной обмоткой возбуждения, но отличается от нее, как указано выше, пограничной частотой вращения холостого хода и меньшей крутизной.
У двигателей серии МП магнитные потоки каждой обмотки равны при номинальном токе. На рис. 4.11 приведены средние характеристики двигателей этой серии. Пуск двигателя происходит при полном пусковом сопротивлении в цепи якоря.

Рис. 11. Схема пуска двигателя смешанного возбуждения
Схемы динамического торможения представлены на рис. 12. При торможении контактор К4 должен быть разомкнут, а контактор К1 замкнут. Сопротивление Ra выбирают так, чтобы ток последовательной обмотки в режиме торможения был равен номинальному току двигателя.
Торможение по схеме на рис. 12, б значительно эффективнее, чем по схеме на рис. 12, а, но сложнее и дороже. Динамическое торможение позволяет не только сократить время замедления и обеспечить точную остановку, но и предотвратить аварию благодаря быстрой остановке механизма.
Рис. 12. Схема динамического торможения двигателя смешанного возбуждения
При аварийном торможении действия механических тормозов недостаточно и его дополняет динамическое торможение. Аварийное торможение должно быть безотказным в работе и достаточно эффективным даже в случае сгорания катушек контакторов, внезапного снижения напряжения сети или ее отключения.
В связи с этим в контакторах, осуществляющих цепи динамического торможения, предусмотрены закрытые главные контакты, а питание обмоток возбуждения в режиме динамического торможения производится не от сети, а от самого двигателя.
Динамическое торможение двигателя с самовозбуждением менее эффективно, чем с возбуждением от сети. Но аварийное торможение происходит редко, поэтому можно допустить повышенные токи и тормозные моменты, чем можно в некоторой степени скомпенсировать потерю эффекта от уменьшения магнитного потока.
В заключение необходимо отметить, что электродвигатели постоянного тока применяют лишь при необходимости обеспечить плавное и глубокое регулирование скорости, а также при тяжелом режиме работы. Наилучшим для привода крановых механизмов является электродвигатель постоянного тока с последовательным возбуждением, обладающий мягкой естественной характеристикой, мягкими и жесткими искусственными характеристиками и дающий возможность при соответствующих искусственных системах получить любую требуемую скорость как в двигательном, так и в тормозном режиме. По сравнению с другими видами электродвигателей при наименьшем росте тока двигатели постоянного тока с последовательным возбуждением обеспечивают наибольшую перегрузочную способность, что очень важно для механизмов передвижения кранов, особенно при пуске.
Наибольший эффект дает установка этих электродвигателей на механизмах подъема, которые примерно половину всего рабочего времени перемещают пустые грузозахватные приспособления, и в этом случае мягкие естественные характеристики очень подходят для получения повышенных скоростей.
Установка таких электродвигателей на механизмах передвижения больших преимуществ не имеет, так как поднятый груз мало изменяет общую массу мостового крана и механизмы передвижения практически работают с постоянной нагрузкой. Но в то же время электродвигатели с последовательным возбуждением обладают повышенным пусковым моментом, что позволяет механизмам передвижения достигать номинальной скорости при пусках и реверсах быстрее, чем при установке электродвигателей других типов.
Сравнительно редко для привода крановых механизмов применяют электродвигатели постоянного тока с параллельным и смешанным возбуждением. Электродвигателям постоянного тока наряду с некоторыми преимуществами при эксплуатации мостовых кранов присущи и недостатки: увеличенные масса и габариты, высокая стоимость, необходимость большего ухода и, наконец, специальной энергоустановки. Электростанции в настоящее время вырабатывают трехфазный переменный ток. Следовательно, для питания крановых электродвигателей постоянного тока требуется создавать мощные преобразовательные установки или иметь собственную электростанцию постоянного тока. В связи с этим применять электродвигатели постоянного тока может быть выгодно лишь на мостовых кранах с тяжелым и весьма тяжелым режимами работы на заводах металлургических и тяжелого машиностроения.
Рекламные предложения:
Главная → Справочник → Статьи → Форум
Механизация земляных работ
Механизация строительства
Механизация дорожных работ
Автоматизация строительства
→ Бетонные работы
→ Мини-тракторы
 Разделы
Разделы
Строительные машины и оборудование
→ Для специальных земляных работ
→ Дорожно-строительные машины
→ Строительное оборудование
→ Асфальтоукладчики и катки
→ Большегрузные машины
→ Строительные машины, часть 2,
→ Дорожные машины, часть 2
→ Ремонтные машины
→ Ковшовые машины
→ Автогрейдеры
→ Экскаваторы
→ Бульдозеры
→ Скреперы
→ Грейдеры
Эксплуатация строительных машин
→ Эксплуатация средств механизации
→ Эксплуатация погрузочных машин
→ Эксплуатация паровых машин
→ Эксплуатация экскаваторов
→ Эксплуатация подъемников
→ Эксплуатация кранов перегружателей
→ Эксплуатация кузовов машин
→ Крановщикам и стропальщикам
Ремонт строительных машин
Ремонт дорожных машин
Ремонт лесозаготовительных машин
Ремонт автомобилей КАмаЗ
Техническое обслуживание автомобилей
Очистка автомобилей при ремонте
Материалы и шины
Остались вопросы по теме:
"Крановые электродвигатели постоянного тока"
— воспользуйтесь поиском.
→ Машины городского хозяйства
→ Естественная история машин
→ Транспортная психология
→ Пожарные автомобили
→ Автомобили-рефрижераторы
→ Монтаж и эксплуатация лифтов
→ Тракторы