Строй-Техника.ру
Строительные машины и оборудование, справочник
Мостовые краны выпускаются с опробованными стандартными электросхемами, примеры которых описаны выше.
Однако в зависимости от количества установленных на одном крановом пути кранов, а также в связи с изменением Правил устройства и безопасной эксплуатации грузоподъемных кранов, а также при заменах аппаратов управления, производимых в процессе эксплуатации, возникает необходимость в изменениях электросхем действующих кранов.
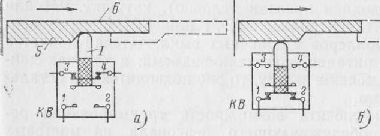
1. В соответствии с требованиями ст. 166 Правил краны мостового типа должны быть оборудованы устройством для автоматического снятия напряжения с крана при выходе обслуживающего персонала на галерею, Это осуществляется посредством контакта люка. Контакт этот должен быть установлен так, чтобы при открывании люка питание троллеев на мосту крана было отключено. С этой целью используется конечный выключатель KB типа ВК. — 211 или ВК-411, который имеет две пары контактов: 1-2 и 3-4 (рис. 1). Контакты 1-2 замыкаются при воздействии на выдвижном люке, а в исходном положении когда на подвижной контакт не действует никакая сила, он под действием пружины замыкает контакты 3-4. Казалось бы не имеет значения куда подключать цепь управления: к контакту 1-2 или 3-4. В первом случае при открытии люка цепь размыкается под действием пружины самовозврата выключателя, а во втором-при воздействии упора на подвижный штырек выключателя. Однако в последнем случае может возникнуть опасность оставить троллеи под напряжением при открытом люке. Это возможно, если крышка люка будет снята и сойдет с направляющих. Тогда штырек под действием пружины возвратится в свое первоначальное положение и замкнет контакты 3-4, а следовательно, троллеи окажутся под напряжением при открытом люке. Поэтому цепь должна замыкаться через контакты 1-2, т.е. при воздействии на штырек механического упора. Если сдвинуть крышку с упора или снять ее, то контакты 1-2 сразу же разомкнутся.
Рекламные предложения на основе ваших интересов:
Дополнительные материалы по теме:
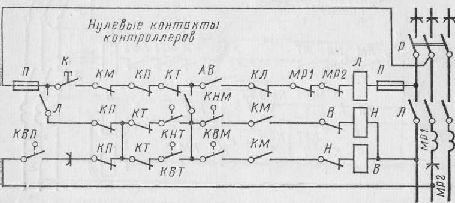
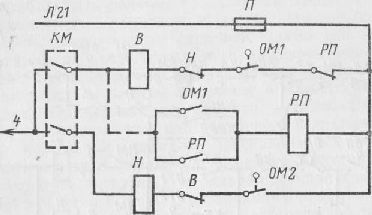
2. Электросхема, у которой произведены необходимые изменения с целью обеспечения безопасности обслуживания, а именно перенесен блок-контакт контактора Л с места, которое обозначено стрелкой, и пусковая кнопка KB имеет две пары контактов.
У существующих схем ток идет по линии, показанной пунктиром, т.е. справа нет блок-контакта и второй пары контактов пусковой кнопки. В этом случае также возникает опасность поражения электрическим током, так как при открытой крышке люка появится напряжение на некоторых троллеях. Это возможно на кранах с приведенной схемой, т.е. с раздельным приводом передвижения. Произойти это может, если штурвал контроллера передвижения моста будет сдвинут с нулевого положения, т.е. контакты К9М или К11М в связи с этим замкнутся.
Эта схема опробована на мостовых кранах автозавода имени Лихачева. Переделка не требует каких-либо дополнительных устройств и заключается в том, что устанавливается пусковая кнопка с двумя парами контактов (взамен существующей с одной парой) и изменяется положение блок-контакта линейного контактора. В этом случае, как видно из схемы, если линейный контактор не включен, напряжение не будет подаваться на катушки ВМ и НМ реверсивного контактора механизма передвижения и сдвиг рукоятки (штурвала) контроллера не приведет к появлению на троллеях напряжения.
3. Согласно ст. 182 Правил электрическая схема управления электродвигателями (грузоподъемной машины должна исключать самозапуск электродвигателей после восстановления напряжения в сети, питающей грузоподъемную машину; пуск электродвигателей не по заданной схеме ускорения; пуск электродвигателей контактами предохранительных устройств (контактами конечных выключателей и блокировочных устройств).
Краны с раздельным приводом передвижения управляются по схеме, приведенной на рис. 2, т.е. одним контроллером через магнитный пускатель. Как видно из рис. 2, после отключения конечного выключателя КНМ или КВМ отключится контактор Н или В и двигатели моста будут остановлены. При этом линейный контактор
Л не отключится, так как цепь его питания продолжает быть замкнутой через свои блок-контакты Л.
Если контроллер не переведен в нейтральное положение, то сразу же после замыкания контактов конечных выключателей включаются контакторы В или Я и кран начнет двигаться. Когда на крановом пути установлен один кран с такой электрической схемой, то особой опасности в этом нет и он может работать без изменения схемы. Опасность возникает при установке на одном крановом пути двух и более кранов. В этом случае их электрические схемы надо переделать.
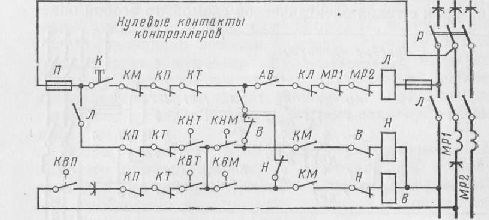
Если на одном из кранов контроллер управления двигателя моста оставлен в одном из рабочих положений, а другой кран в это время отъезжает, то контакты конечного выключателя остановленного крана замкнутся и произойдет самопроизвольное включение механизма первого крана, у которого контроллер был оставлен в рабочем положении. При этом включение может произойти с выведенными сопротивлениями, если контроллер находился в пятом положении. Таким образом, произойдет нарушение ст. 182 Правил, что может привести к тяжелым последствиям в случае нахождения, например, ремонтного персонала на мосту крана, при регулировке конечных выключателей, установке и ремонте «лыж», включающих конечный выключатель, и т. д. Для предотвращения несчастных случаев необходимо схему изменить в соответствии с рис. 3, 4.
В схеме на рис. 3 контакты конечных выключателей КНМ и КВМ включены таким образом, что их размыкание приводит к разрыву цепи линейного контактора Л.
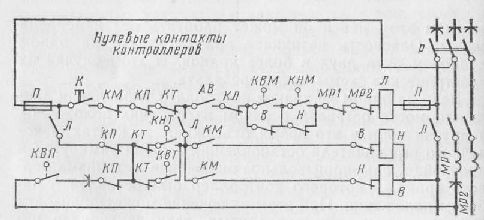
В схеме, приведенной на рис. 4, конечные выключатели КНМ и КВМ хода моста включены в цепь управления линейного контактора и зашунтированы размыкающими контактами контакторов направления движения В и Н. Таким образом, конечные выключатели хода моста будут разрывать цепь управления линейного контактора и его можно будет включить только после установки всех контроллеров в нулевое положение.
Если на одном пути установлены два крана и только один из них имеет раздельный привод, то также существует опасность. В этом случае схему переделывают следующим образом. Устанавливают промежуточное реле РП типа ЭТ-41, имеющее замыкающий и размыкающий контакты (рис. 5). Параллельно замыкающему контакту включают свободные контакты ограничите-ля передвижения моста ОМ1. При размыкании контакта ограничителя в цепи катушки В замыкаются его контакты в цепи РП, реле включается и размыкает свой контакт в цепи катушки В. Если второй кран отъедет контакт ОМ1 замкнется, первый кран не начнет самопроизвольного движения, так как контакт реле РП в цепи пускателя В останется разомкнутым. Чтобы начать, дальнейшее движение, рукоятку контроллера надо доставить в нулевое положение. Катушка реле РП обесточится при нулевом положении контроллера, и схема восстановится. Таким образом, даже без отключения линейного контактора будет исключаться самопроизвольное передвижение крана.
Имеются краны старых образцов со схемами, где конечные выключатели хода моста установлены не в цепи управления, а в силовой цепи двигателя. При их размыкании лишь отключается двигатель передвижения, а цепь управления остается включенной, что также создает опасность при нахождении двух кранов на одном крановом пути, так как возможно их самовключение. Поэтому такая схема подлежит изменению. Если на крановом пути имеется один кран, то до установки второго электрическая схема может не подвергаться изменению.
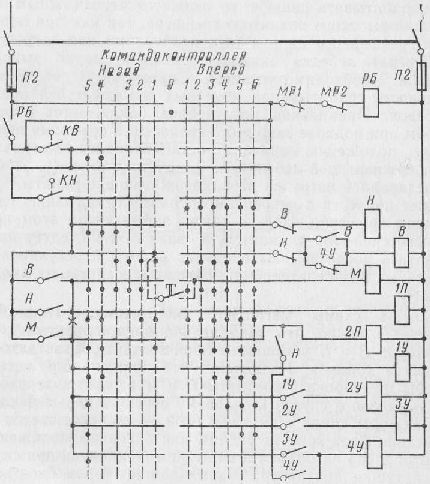
4. Если мостовые краны имеют два механизма подъема, то при работе с одним механизмом может произойти ошибочное включение второго механизма подъема при неисправном (неработающем) ограничителе высоты подъема ирюка произойдет обрыв каната. Чтобы этого не произошло, предусматривают блокировку, позволяющую работать только одному механизму, а при включении второго контроллера будет отключаться контактор. Для этого в каждом контроллере в обоих механизмах устанавливают параллельные контакты, замкнутые в нулевом положении КВГП и КВВП на рис. 46. Если перевести рукоятку контроллера в рабочее положение, контакты КВГП и КВВП размыкаются. При включении второго контроллера отключается и второй контакт и цепь питания катушки линейного контактора разрывается таким же образом, как при срабатывании любого конечного выключателя. Можно также для этой цели предусмотреть пакетный переключатель, и установив его в соответствующее положение, получить возможность работать только одним из двух механизмов подъема.
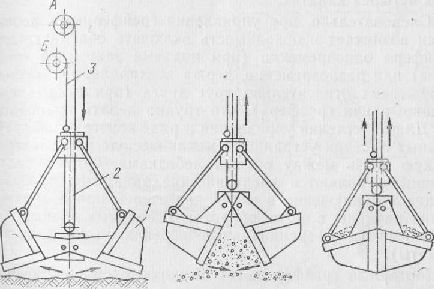
5. В эксплуатации находятся грейферные мостовые краны, у которых возможна раздельная работа поддерживающей и замыкающей лебедок. Ограничитель высоты подъема установлен только на поддерживающей лебедке, которая поднимает закрытый грейфер. Поэтому имеется возможность поднимать грейфер дальше с помощью замыкающей лебедки, которая, закрыв челюсти грейфера, может продолжать намотку каната после срабатывания ограничителя поддерживающей лебедки. Тем самым не исключается возможность обрыва каната, так как замыкающая лебедка не имеет своего ограничителя. Поэтому конечный выключатель необходимо установить также на замыкающей лебедке. При этом на замыкающей лебедке выключатель регулируется на срабатывание при подъеме закрытого грейфера. Если выключатель будет срабатывать раньше, то окажется невозможным закрытие высокого поднятого грейфера, так как при подъеме грейферного каната (что необходимо для закрытия грейфера) лебедка окажется преждевременно выключенной. Необходимо установить правильную последовательность срабатывания конечных выключателей обеих лебедок. Правильная регулировка заключается в том, чтобы при подходе закрытого грейфера к крайнему верхнему положению сначала останавливался механизм поддерживающей лебедки, т.е. нельзя допускать, чтобы передавалась нагрузка на поддерживающие канаты, что может привести к непредусмотренному открыванию груженого грейфера. Нельзя также забывать об этом при замене грейфера и канатов, в связи с чем следует производить после замены проверку работы и регулировку конечных выключателей на последовательность их включения.
6. Из схемы магнитного контроллера типа ТС (рис. 7) видно, что параллельно блок-контактам контакторов В и Я установлен блок-контакт М контактора магнита тормоза. Назначение его заключается в том, чтобы шунтировать контакты В и Н во время перехода от тормозного спуска к силовому спуску с целью исключения «прыгания» тормоза. В этой схеме исключается из действия блок-контакт Н, так как в первом положении контроллера на подъем и во втором положении при спуске катушка контактора запитывается через блок-кон-такт В и на других ступенях контроллера питается через свой блок-контакт.
Питание катушки контактора магнита через свой блок-контакт может привести к аварии. Например, при неисправности в цепи катушки В или Н соответствующий контактор отпадет, подача напряжения на двигатель прекратится, а тормоз в действие не придет, так как катушка контактора магнита питается через свой блок-контакт. Груз под действием массы начнет самопроизвольно опускаться вниз. Указанная схема опасна в эксплуатации, так как любое отключение контактора
В или Н должно сопровождаться срабатыванием тормоза, а при такой схеме это не всегда возможно. Чтобы не возникла такая опасность, необходимо снять перемычку на участке, который отмечен знаком X. После переделки схемы при отпадении контакторов В или Н в случае неисправности цепи управления обязательно будет срабатывать тормоз.
7. Иногда возникает необходимость изменения схемы для повышения производительности труда или экономии электроэнергии. Примером может служить получение возможности опускания грейфера при неработающем двигателе. Согласно существующему положению механизмы подъема груза должны снабжаться тормозами замкнутого типа, автоматически размыкающимися при включении и замыкающимися при выключении привода.
Ё схемах тормозные катушки Подключены в большинстве случаев параллельно обмоткам статора двигателя. Согласно ст. 128 Правил у грейферных двухбарабанных лебедок с раздельным электроприводом на механизме поддерживающего барабана допускается устройство педали (кнопки) для растормаживания барабана при неработающем двигателе. Это можно осуществить в схеме управления двигателем при помощи магнитного контроллера типа ТС.
Катушки тормоза подключаются в силовую цепь до контакторов Н и В. Тормозной магнит включается при помощи контактора М. При переводе рукоятки коман-доконтроллера в положение спуска включается контактор Н, подключаются контакторы М и 1П, тормоз растормаживается и происходит опускание грейфера. При установке рукоятки в нулевое положение контакторы Н и М отпадут и механизм остановится. Если установить ножную педаль и перемычку, как показано пунктирными линиями на рис. 7, то нажатием на педаль во время опускания грейфера и установкой рукоятки командокон-троллера в нулевое положение можно, выключив двигатель, оставить тормоз в расторможенном состоянии и продолжать опускание грейфера при выключенном двигателе. При нажатии на педаль без предварительного включения двигателя движения не произойдет. Таким образом, можно производить работу грейфером, экономя электроэнергию.
8. Даже хорошо отрегулированные тормоза механизмов передвижения кранов для плавности остановки перед окончательным выключением двигателя требуют, чтобы крановщик несколько раз включил и выключил штурвал или рукоятку контроллера, в противном случае возможно раскачивание груза. Во избежание этого крановщики отпускают тормоза, увеличивая тем самым тормозной путь, и прибегают при этом к противовключению. Это небезопасно и приводит к быстрому износу механизма крана (особенно зубчатых соединений). Чтобы облегчить работу крановщика, уменьшить износ деталей, увеличить производительность и улучшить условия безопасной эксплуатации крана, целесообразно тормоза механизма передвижения сделать не нормально закрытыми, а нормально открытыми, управляемыми кнопкой. В этом случае при подходе крана к месту, где необходимо остановить кран, крановщик устанавливает штурвал контроллера в нулевое положение и во время движения крана по инерции периодически, нажатием на специальную кнопку постепенно снижает скорость и плавно останавливает кран. Тормоза механизмов передвижения кранов должны быть замкнутого типа, однако если электрической схемой контроллера предусмотрена возможность торможения двигателя согласно ст. 140 Правил, допускается устанавливать на механизме передвижения такие тормоза, которые при отключении двигателя аппаратами управления не замыкаются. В этом случае электрической схемой может быть предусмотрено наложение (снятие) тормоза добавочным аппаратом (кнопкой) при нахождении контроллера в нулевом положении.
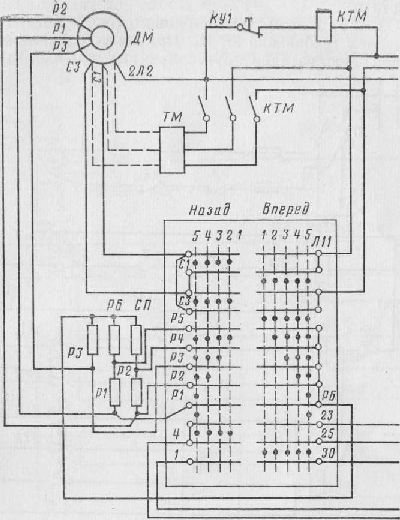
На рис. 8 приведена схема, которая обеспечивает эти требования и позволяет произвести плавную остановку крана. С этой целью применяются дополнительный магнитный пускатель КТМ и кнопка KVI. В указанной схеме питание тормозных катушек производится не от статора двигателя, как показано пунктирной линией, а от сети. При включении линейного контактора включается также магнитный пускатель КТМ и катушки тормозного электромагнита отжимают колодки тормоза. Когда контроллером включается двигатель передвижения, тормоза уже открыты. Если необходимо произвести плавную остановку крана, штурвал контроллера устанавливают в нулевое положение и нажимают на кнопку KVI — При этом катушка пускателя КТМ отключается, размыкаются контакты КТМ тормоза и происходит подтормаживание. При отпускании кнопки колодки тормоза снова растормаживаются.
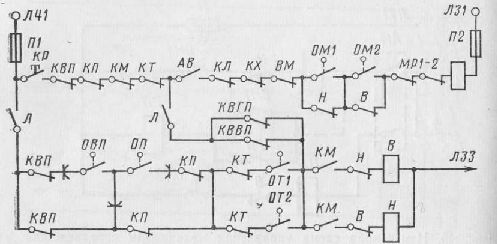
9. На рис. 9 представлена защитная панель постоянного тока. Если штурвал контроллера находится в нулевом положении (и нулевые контакты контроллеров КМ, КТ, КП замкнуты), замкнуты контакты аварийного выключателя АВ, люка КЛ, дверей кабины КД, замка с ключом КЗм, то при нажатии на кнопку КР запитывается катушка линейного контактора Л и замыкаются ее блок-контакты Л1 и Л2. Кнопка может быть отпущена, так как она блокируется цепью, состоящей из контактов Л2, МР1, МР2. При перегрузке одного из двигателей контакты реле МР1, МР2 разомкнутся и контактор Л отключится.
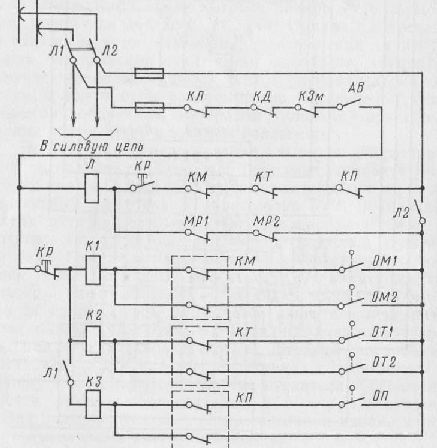
Поворотом вала контроллера замыкается соответствующая цепь моста, тележки или подъема. При срабатывании любого из конечных выключателей движение в одном из направлений становится невозможным, так как отключаются контакторы К1, К2 или КЗ двигателя соответствующего механизма. Защитные панели постоянного тока отличаются от защитных панелей трехфазного тока тем, что при срабатывании конечного выключателя одного из механизмов отключается не общий линейный контактор, а контактор данного механизма. Например, при разрыве цепи конечным выключателем подъема ОП (хода вверх) отключается катушка контактора КЗ, а остальные механизмы могут продолжать работать.
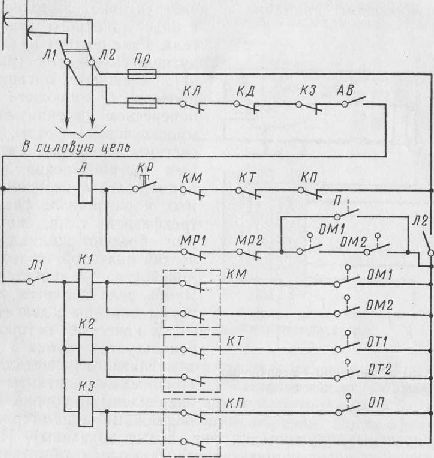
Однако такие схемы постоянного тока работают с на-рушением требований ст. 182 Правил устройства и безопасной эксплуатации грузоподъемных кранов, так как включение двигателей с фазным ротором у этих схем становится возможным не. с первого положения, а с любого промежуточного, в том числе и с пятого. Из приведенной схемы видно, что кнопкой КР подается напряжение на катушку контактора Л после восстановления снятого напряжения или срабатывания защиты. При этом размыкающий контакт кнопки КР исключает одновременную подачу питания на катушку контактора Л и контакторов К1-КЗ во избежание включения их при возможном коротком замыкании в сети. Если во время работы любого механизма, когда контроллер будет находиться iB третьем, четвертом или пятом положении, нажать на кнопку КР, работа механизма прекратится. Но когда кнопка КР будет отпущена, механизм мгновенно включится в том положении командоконтроллера, в котором он был остановлен, т.е. с третьего, четвертого или пятого. Чтобы исключить такой внезапный пуск и одновременную подачу питания на катушку контактора Л и катушки контакторов К1 — КЗ, необходимо внести изменения, которые указаны на рис. 50, т.е. размыкающий контакт кнопки КР исключается, блок-контакт устанавливается перед катушками контакторов К1 — КЗ. Кроме того, последовательно с контактами максимальных реле МР1 и МР2 включаются контакты передвижения моста ОМ1 и ОМ2, которые отключают линейный контактор в крайних положениях моста. Педаль П предназначена для восстановления схемы.
Реле защиты от обрыва фазы основано на магнито-динамическом принципе и конструктивно выполнено
Реле состоит из следующих элементов (рис. 11): внешнего магнито-провода, имеющего в поперечном сечении вид многолучевой звезды, и системы кольцевых катушек, поочередно (по длине реле) присоединяемых к различным фазам трехфазной цепи, которые образуют цилиндрический индуктор (статор) линейного двигателя. Якорь реле является ротором линейного двигателя, в качестве которого используется трубка из немагнитного металла. Подвижные лонтакты 4 закреплены на трубке, неподвижные — на стержне (контактные пружины на рис. 51 не показаны). При включении катушек реле последовательно с обмотками двигателя крана системой кольцевых катушек создается бегущее магнитное поле. Магнитное поле индуктирует в трубке токи, которые, взаимодействуя с полем, приводят к возникновению механической силы. Под действием этой силы трубка приходит в движение и замыкает контакты. При обрыве фазы вместо бегущего появляется пульсирующее поле и якорь возвращается в исходное положение, размыкая при этом контакты. При трехфазном несимметричном режиме индуктор питается в основном током обратной последовательности и якорь также возвращается в исходное положение.
Это реле может быть использовано в простейших схемах включения асинхронных двигателей. Вариант включения реле в схему электропривода мостового крана показан на рис. 52. Катушки магнитодинамического реле РИТ включаются последовательно с обмотками двигателя подъема. В схему управления катушки линейного контактора Л включены замыкающий 1РИТ и размыкающий 2РИТ контакты реле защиты РИТ, вспомогательное реле времени РВ с контактом 1РВ и контакт нулевой блокировки командоконтроллера КК.
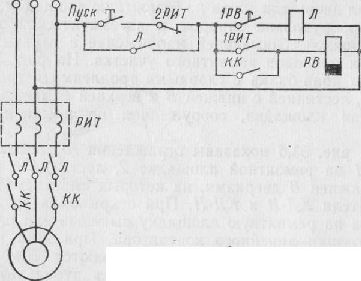
Схема работает следующим образом. После включения кнопки Пуск через контакт реле 2РИТ и контакт командоконтроллера КК получает питание катушка реле времени РВ. Реле времени замыкает свой контакт 1РВ. Поступает питание на катушку контактора Л. Схема подготовлена к работе. При переводе рукоятки командоконтроллера в рабочее положение КК размыкается, а 1РИТ не успевает замкнуться, так как еще нет тока в силовой цепи двигателя, но контакт реле 1РВ имеет выдержку времени на размыкание, поэтому питание продолжает поступать на катушку контактора. Когда рукоятка командоконтроллера принимает рабочее положение, замыкается контакт 1РИТ и питание продолжает поступать на катушку реле времени. Его контакт 1РВ остается замкнутым и катушка Л продолжает получать питание через этот контакт.
При обрьгве фазы в цепи питания асинхронного двигателя подъема реле РИТ размыкает свой контакт 1РИТ и замыкает контакт 2РИТ. Так как рукоятка командо-контроллера находится в рабочем положении, катушка контактора Л будет получать питание только в промежуток времени, равный выдержке времени контакта 1РВ. После этого контактор Л отключает двигатель.
11. Если расстояние от пола ремонтной площадки до нижних частей крана менее 1800 мм, согласно ст. 229 Правил дверь для входа на ремонтную площадку должна быть оборудована запором и автоматической электроблокировкой, снимающей напряжение с главных троллейных проводов ремонтного участка. На рис. 13, а показаны кран-балка с главными троллеями и троллеями моста, лестницей -с нижней В и верхней Б дверками, ремонтная площадка, сооруженная на крыше кладовой цеха.
На рис. 13,б показаны ограждения А главных троллеев на ремонтной площадке, лестница с верхней Б и нижней В дверками, на которых смонтированы выключатели КД — В и КД-Н. При открывании дверей для выхода на ремонтную площадку выключатели размыкают катушки линейного контактора. При этом главные троллеи и троллеи моста обесточиваются. Для отключения ремонтного участка установлен рубильник.
На рис. 13, в приведена принципиальная схема электроблокировки ремонтной площадки однобалочного крана, управляемого с пола, и подключения главных троллеев от цеховой электросети.
Во время работы кран-балки электрический ток проходит по следующему пути: фаза ЛЗ, катушка контактора К, кнопка Стоп, блок-контакт К, ключ-марка КМ, концевые выключатели КД-В, КД-Н и вторая фаза Л2.
12. На некоторых мостовых кранах установлены магнитные контроллеры типа ТС или ДТС. Особенность этих контроллеров состоит в том, что при установке рукоятки командоконтроллера на трех первых положениях спуска порожний или легко груженный крюк движется не вниз, а вверх. При этом не работает защита, ограничивающая высоту подъема крюка, что может привести к подтягиванию крюковой обоймы до упора и обрыву грузового каната. Указанные схемы контроллеров должны быть изменены таким образом, чтобы ограничитель высоты подъема крюка был включен в цепь на первых трех положениях спуска.

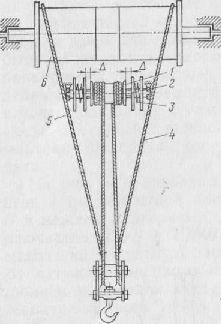
Наибольший эффект безопасности при эксплуатации мостовых кранов достигается при совместном принятии мер как по электрической, так и по механической части крана. Чтобы избежать обрыва грузового каната и падения груза, необходимо помимо правильной установки ограничителя, переделать грузовой полиспаст. Существо изменения конструкции полиспаста состоит в том, что в качестве уравнительного устройства применяется не блок, а барабан, устанавливаемый на винте, и с обеих сторон барабана располагаются буферные устройства (рис. 14). Два каната одними концами закреплены на барабане в лебедки, а другими — на уравнительном барабане. На уравнительный барабан канаты заведены с разных сторон так, что при вращении его один канат сматывается, а другой-наматывается. Между торцевыми поверхностями барабана и тарелками буферных устройств имеется некоторый зазор Д. Устройство работает следующим образом: когда оба каната целы, спуск и подъем груза происходит, как обычно, натяжения в ветвях каната выравниваются за счет вращения уравнительного барабана, перемещающегося при этом в осевом направлении на величину А. При обрыве каната груз, падая, сматывает второй конец каната с уравнительного барабана, который, двигаясь вдоль винта, выбирает зазор, упирается в буфер торцевой поверхностью и плавно тормозится до полной остановки. Груз при этом удерживается вторым канатом.
Рекламные предложения:
Главная → Справочник → Статьи → Форум
Механизация земляных работ
Механизация строительства
Механизация дорожных работ
Автоматизация строительства
→ Бетонные работы
→ Мини-тракторы
 Разделы
Разделы
Строительные машины и оборудование
→ Для специальных земляных работ
→ Дорожно-строительные машины
→ Строительное оборудование
→ Асфальтоукладчики и катки
→ Большегрузные машины
→ Строительные машины, часть 2,
→ Дорожные машины, часть 2
→ Ремонтные машины
→ Ковшовые машины
→ Автогрейдеры
→ Экскаваторы
→ Бульдозеры
→ Скреперы
→ Грейдеры
Эксплуатация строительных машин
→ Эксплуатация средств механизации
→ Эксплуатация погрузочных машин
→ Эксплуатация паровых машин
→ Эксплуатация экскаваторов
→ Эксплуатация подъемников
→ Эксплуатация кранов перегружателей
→ Эксплуатация кузовов машин
→ Крановщикам и стропальщикам
Ремонт строительных машин
Ремонт дорожных машин
Ремонт лесозаготовительных машин
Ремонт автомобилей КАмаЗ
Техническое обслуживание автомобилей
Очистка автомобилей при ремонте
Материалы и шины
Остались вопросы по теме:
"Рекомендуемые изменения в электрических схемах кранов"
— воспользуйтесь поиском.
→ Машины городского хозяйства
→ Естественная история машин
→ Транспортная психология
→ Пожарные автомобили
→ Автомобили-рефрижераторы
→ Монтаж и эксплуатация лифтов
→ Тракторы