Строй-Техника.ру
Строительные машины и оборудование, справочник
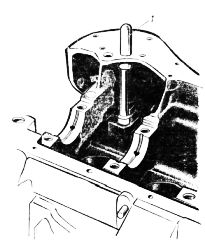
Рассмотрим методы анализа упругих систем на примере привода цепного рабочего органа многоковшового экскаватора с электрическим многомоторным приводом. Построим для приведенной на рис. 1 кинематической схемы диаграмму масс. Число степеней свободы рассматриваемой упругой системы соответствует количеству независимых координат, определяющих положение всех масс системы.
Представленная на рис. 1 кинематическая схема может быть разбита на следующие участки: 1—3— участок вала между двигателем и ведущей шестерней, 3—4 — зубчатое зацепление между ведущей и ведомой шестернями редуктора, 4—5 — участок вала между ведомой шестерней и предохранительной муфтой, 5—6 — участок вала между предохранительной муфтой и ведущим барабаном и 6—7 — участок цепного рабочего органа, связанный с ведущим барабаном.
Рекламные предложения на основе ваших интересов:
Дополнительные материалы по теме:
Рис. 1. Кинематическая схема привода цепи рабочего органа многоковшового экскаватора:
1 — электродвигатель; 2 — упругая муфта; 3 и 4 — шестерни редуктора; 5 — предохранительная муфта; 6 — ведущий барабан цепи; 7 — ковшовая цепь
На рис. 1, а представлена расчетная схема рассматриваемой динамической системы. Mait] — момент, развиваемый двигателем, приведенный к валу ведущего барабана.
В процессе составления для реального механизма расчетной динамической схемы допускаются различные упрощения. Так, распределенная по длине масса валов приводится к сосредоточенным массам. В этом случае, если на валу расположены две сосредоточенные массы, а узел колебаний находится в непосредственной близости от одной из них, то к моменту инерции другой массы следует добавить 1/3 момента инерции распределенной массы вала. Если узел колебаний расположен посредине вала, то к каждой массе добавляется 4/6 момента инерции распределенной массы вала, и, наконец, если узел колебаний отсутствует, то к каждой из сосредоточенных масс добавляется 1/2 момента инерции распределенной массы вала.
Упрощение расчетной схемы достигается также за счет приведения масс, моментов инерции и жесткости элементов рассматриваемой системы, в данном случае, к валу ведущего барабана.
Часто возникает необходимость в дальнейшем упрощении упругой системы, однако, применяемые упрощения при всех условиях не должны искажать исследуемые динамические процессы.
Рассмотрим случай стопорения цепного рабочего органа при встрече одного из ковшей с труднопреодолимым препятствием, являющийся, пожалуй, наиболее опасным с точки зрения возникающих в элементах рабочего органа перенапряжений.
Когда скольжение в муфтах отсутствует, ведущую и ведомую части трансмиссии, можно рассматривать как единую систему. В этом случае расчетная схема, очевидно, окажется наиболее сложной. В рассматриваемом случае при стопорении цепного рабочего органа предохранительная фрикционная муфта начнет проскальзывать. При этом ведущая и ведомая части упругой системы могут рассматриваться независимо друг от друга, если пренебречь изменением крутящего момента, передаваемого муфтой, в функции скорости скольжения. Такое допущение вполне приемлемо для практических расчетов.
Аналогичное расчленение сложной схемы допустимо при наличии в ней турбопередачи. В общем случае при произвольно изменяющихся сопротивлениях на любом достаточно малом перемещении может быть принята линейная зависимость.
Приращение силы сопротивления на единицу перемещения исполнительного органа может служить характеристикой жесткости препятствия. Приведенная жесткость препятствия измеряется крутящим моментом, приложенным к валу приведения, необходимым для поворота его на один радиан.
Как правило, при работе в однородных мягких и средней крепости грунтах приведенная жесткость препятствия значительно меньше жесткости элементов рассматриваемой динамической системы.
Учитывая, что расстояния между сосредоточенными массами эквивалентной схемы обратно пропорциональны жестко-стям соответствующих участков, а также возможность при скольжении фрикционной муфты выделить ведомую часть упругой системы, присоединив к ней последовательно упругий элемент, эквивалентный препятствию, получим расчетную схему, показанную на рис. 1,б. На схеме — момент инерции ведомой части предохранительной муфты; — момент, передаваемый муфтой.
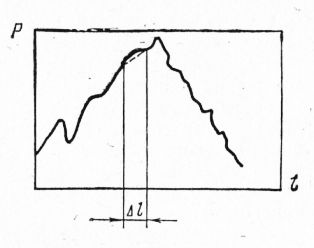
Рис. 2. Зависимость изменения сопротивления Р в функции перемещения I ковша экскаватора при стопорении
Как видно, все массы рассматриваемого механизма сосредоточены на одном конце вала, влияние массы отдельных узлов на закон движения упругой системы в целом сравнительно невелико, поэтому без риска существенного искажения исследуемого-динамического процесса для данного расчетного случая можно считать все массы сосредоточенными в одной точке вала барабана, представив систему как имеющую одну степень свободы.
К такому виду могут быть приведены при решении задач, связанных с переходными процессами во время резкого торможения, расчетные схемы исполнительных органов всех землеройных машин при их стопорении.
Что касается части схемы в пределах от двигателя до ведущей половины предохранительной муфты, то в процессе стопо-рения цепного рабочего органа динамическая нагрузка в ней ограничивается величиной предельного крутящего момента Mmax, передаваемого фрикционной предохранительной муфтой.
Упрощенная схема цепного рабочего органа многоковшового-экскаватора получена из предпосылки, что жесткость препятствия существенно меньше жесткости даже наиболее податливых элементов рассматриваемой системы. В тех случаях, когда это условие не соблюдается, приходится цепной рабочий орган заменять эквивалентным упругим стержнем, продольные колебания которого описываются дифференциальным уравнением второго порядка в частных производных. Однако в некоторых случаях, например, при решении динамических задач энергетическим методом, может быть предложен более простой путь.
Число степеней свободы расчетной схемы зависит от шага ковшей, длины цепного рабочего органа, местоположения застопоренного ковша и в отдельных случаях превышает 8—10.
В пределах рабочих нагрузок между деформацией ковшовой цепи и ее натяжением существует практически линейная зависимость. Рассматриваемая механическая система может быть отнесена, следовательно, к классу линейных. Известно, с другой стороны, что к линейным системам применим принцип суперпозиции.
Принцип суперпозиции позволяет упростить решение динамических задач, связанных с определением наибольшего натяжения в цепном рабочем органе.
Аналогичный подход к расчету максимальных динамических нагрузок может быть осуществлен применительно к системам полиспаст—лебедка при стопорении рабочего органа — крюка крана, ковша одноковшового экскаватора, отвала бульдозера, ковша скрепера и т. д. Принимаемые упрощения расчетных схем неизбежно приводят к определенным погрешностям, значения которых необходимо оценить. Крутильные колебания во время переходного процесса приводят к колебаниям передаваемого муфтой момента. Однако обычно амплитуда этих колебаний для одноковшовых экскаваторов, например, не превышает 8—10% номинальных значений крутящего момента.
Расчет динамических нагрузок в системах полиспаст-лебедка, широко используемых на многочисленных строительных машинах как систем с одной степенью свободы, приводит к погрешности в пределах 5—8%.
При решении динамических задач по определению максимальных значений, возникающих при ударе усилий энергетическим методом для рабочего оборудования бульдозеров, цепного рабочего органа многоковшового экскаватора, канатных систем управления, ковшей одноковшовых экскаваторов и т. д. допускается погрешность в пределах от 5 до 18%, причем расчетные значения динамических нагрузок, как правило, больше фактических. Следует отметить также, что меньшие значения погрешностей относятся к системам, включающим элементы повышенной податливости — канаты, цепи и т. п., тогда как большие значения погрешностей характерны для жестких систем.
При учете деформации грунта по рекомендованной выше методике допускаемая погрешность находится в пределах 6— 10%.
Рекламные предложения:
Главная → Справочник → Статьи → Форум
Механизация земляных работ
Механизация строительства
Механизация дорожных работ
Автоматизация строительства
→ Бетонные работы
→ Мини-тракторы
 Разделы
Разделы
Строительные машины и оборудование
→ Для специальных земляных работ
→ Дорожно-строительные машины
→ Строительное оборудование
→ Асфальтоукладчики и катки
→ Большегрузные машины
→ Строительные машины, часть 2,
→ Дорожные машины, часть 2
→ Ремонтные машины
→ Ковшовые машины
→ Автогрейдеры
→ Экскаваторы
→ Бульдозеры
→ Скреперы
→ Грейдеры
Эксплуатация строительных машин
→ Эксплуатация средств механизации
→ Эксплуатация погрузочных машин
→ Эксплуатация паровых машин
→ Эксплуатация экскаваторов
→ Эксплуатация подъемников
→ Эксплуатация кранов перегружателей
→ Эксплуатация кузовов машин
→ Крановщикам и стропальщикам
Ремонт строительных машин
Ремонт дорожных машин
Ремонт лесозаготовительных машин
Ремонт автомобилей КАмаЗ
Техническое обслуживание автомобилей
Очистка автомобилей при ремонте
Материалы и шины
Остались вопросы по теме:
"Методы анализа систем, их расчленение и упрощение для определения динамических нагрузок"
— воспользуйтесь поиском.
→ Машины городского хозяйства
→ Естественная история машин
→ Транспортная психология
→ Пожарные автомобили
→ Автомобили-рефрижераторы
→ Монтаж и эксплуатация лифтов
→ Тракторы