Строй-Техника.ру
Строительные машины и оборудование, справочник
Водителей считают полностью ответственными за 82% всех происшествий в ФРГ, 75 в Бразилии, 74 в Венгрии, 41 в Италии, 96 в Польше, 80% в США1. Поэтому одной из основных задач автомобильной электроники является сокращение ДТП, происходящих по вине водителя.
Автомобильные системы повышения безопасности обычно разделяют на активные и пассивные. Активные системы обеспечивают предотвращение ДТП. Назначение пассивных систем заключается в -уменьшении последствий ДТП. Наиболее перспективными являются работы, направленные на предотвращение ДТП, а не на ослабление их последствий (т. е. на устранение причины, а не следствия). Имеется множество различных путей улучшения активной безопасности автомобиля с помощью электроники. Эти пути можно объединить в два принципиально различных направления.
Первое направление развивается давно. Оно базируется на системном подходе, при котором автомобиль, водитель и дорога рассматриваются как единая система. Результатом такого подхода является вывод о необходимости максимального соответствия свойств автомобиля психофизиологическим возможностям человека.
Рекламные предложения на основе ваших интересов:
Дополнительные материалы по теме:
Среди работ по использованию электроники для вершенствования активной безопасности рассматриваемого как элемент системы авюмобиль-водитель—дорога, можно выделить следующие направления:
— совершенствование управляемости, устойчивости плавности хода автомобиля;
— улучшение видимости дорожной обстановки; улучшение слышимости звуковых сигналов; предотвращение неправильных действий водителя и пассажиров.
Второе направление работ по электронным системам, повышающим активную безопасность автомобиля, интенсивно развивается лишь в последние десятилетия. Оно базируется на частичном или полном исключении водителя из процесса управления транспортным средством благодаря автоматизации функций, выполняемых человеком. Среди этих систем можно выделить устройства, управляющие курсом и скоростью движения автомобиля. Системы управления курсом пока не получили широк’ого развития по ряду причин. Напротив, системы управления скоростью развиваются высокими темпами.
Номенклатура электронных устройств, повышающих активную и пассивную ‘безопасность, весьма широка. Поэтому далее приводятся описания лишь некоторых систем, представляющих особый интерес.
Управление расстоянием между мостом и кузовом. В процессе эксплуатации масса груза, перевозимого автомобилем, отличается от номинальной. Из-за этого ухудшаются управляемость и устойчивость автомобиля, возможны удары подвески об ограничитель хода кузова. Поэтому созданы устройства, позволяющие сохранить постоянным расстояние между мостом и кузовом при изменении нагрузки. Применение данных устройств дает возможность компенсировать в определенной мере ухудшение управляемости, устойчивости и плавности хода автомобиля.
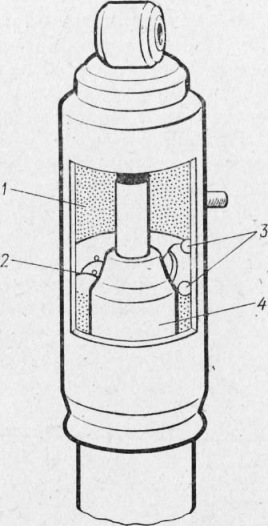
Эти устройства имеют клапан и воздушный компрессор, подсоединенный к пневматическим амортизаторам. Увеличение (уменьшение) давления воздуха в воздушной камере амортизатора вызывает подъем (опускание) кузова.
Недостатком применяемых устройств является механический датчик расстоя-ия между мостом и кузовом Американская фирма «Монрое» («Monroe Auto Equipment Со») разработала электронное устройство управления этим расстоянием с электрическим воздушным компрессором. Оно имеет ряд преимуществ перед механическим аналогом: меньшую дену и массу, большую надежность.
Желаемое расстояние поддерживается с помощью фоторезисторного датчика, встроенного в корпус пневматического амортизатора. При малом расстоянии между мостом и кузовом включается воздушный компрессор, который увеличивает давление в воздушной камере амортизатора и тем самым приподнимает кузов. Когда расстояние между кузовом и мостом слишком велико, подается напряжение на электромагнитный клапан, выпускающий воздух из камеры до. тех пор, пока расстояние не станет близким к номинальному.
Ошибка стабилизации не превышает 6,3 мм. Особенностью этого устройства является то, что команда на корректировку давления подается блоком управления только в том случае, если расстояние отличается от номинального на протяжении отрезка времени, превышающего 15—20 с. Введение этого условия объясняется тем, что в процессе движения по дороге при торможении и на поворотах происходят колебания кузова, являющиеся следствием нормальной работы подвески.
Предотвращение блокирования колес при тормож нии. Последствия блокирования колес при торможени (занос, складывание автопоездов, опрокидывание, выход на обочину и т. д.) являются причиной 87% ДТП не связанных со столкновениями.
Причин столь большого количества ДТП при торможении несколько. Одной из них является торможение при заблокированных (невращающихся) колесах. Сцепные свойства заблокированных колес могут отличаться от оптимальных на 20%. Это обстоятельство и приводит к увеличению в большинстве случаев длины тормозного пути. Кроме того, при блокировании колес значительно снижается коэффициент сцепления шин с дорогой в поперечном направлении и автомобиль становится практически неуправляемым.
Для устранения указанных последствий блокирования колес в автомобиле применяют антиблокировочные системы (АБС). Задачей АБС является управление вращением колес при торможении для обеспечения их максимального сцепления с дорогой. Достижение этой цели позволяет практически во всех случаях эксплуатации обеспечить автомобилю в процессе торможения устойчивость и управляемость движения при достаточно высокой эффективности торможения.
В литературе приводятся следующие примеры эффективности АБС. При экстренном торможении с начальной скорости 96,5 км/ч на сухом асфальтобетонном покрытии угол, на который повернулся легковой автомобиль без АБС, составил 15°, а на мокром покрытии 29°. Углы поворота автомобиля, оборудованного АБС, при тех же условиях, составили 1 и 2° соответственно. Показательны результаты торможения со скорости 40 км/ч в условиях, когда под колесами одного борта находится бетонное покрытие, а другого — укатанный снег. Автомобиль без АБС развернулся на угол, больший 90°, в то время как оснащенный АБС на 20°.
При блокировании колес резко повышается износ шин. Так, при торможении со скорости 180 км/ч с заблокированными колесами шина стирается на 6 мм. АБС может увеличить срок службы шин на 6—10%.
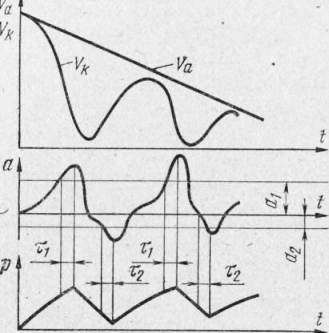
Алгоритм основан на сравнении замедления а колеса с некоторой заранее заданной величиной называемой уставкой. При нажатии на педаль тормоза давление р в приводе возрастает во времени t. Увеличивается-замедление колеса. При достижении замедления значения уставки вырабатывается команда на уменьшение (сброс) давления. Уменьшение замедления начинается с запаздыванием ть обусловленным инерционностью электронных и механических си-’ стем. Когда замедление сравняется со значением второй уставки о2, подается команда на увеличение давления. Увеличение замедления начинается с запаздыванием тг, и цикл повторяется. В результате работы АБС размах колебаний скорости колеса vK постоянно уменьшается. Соответственно снижается и скорость автомобиля va.
По АБС накоплен значительный опыт, который в определенной степени можно распространить и на другие изделия автомобильной электроники. Выявлено, например, что установка АБС приводит к достаточно серьезным изменениям в конструкции автомобиля. Речь идет о необходимости усиления тормозных механизмов и несущих элементов ходовой части, увеличении массы и размеров тормозных механизмов и т. д. Причины изменения конструкции заключаются в росте пиковых нагрузок на шасси, повышении расхода рабочего тела тормозного привода, возникновении в тормозном приводе гидравлических ударов, волновых и кавитационных явлений. Этот достаточно обширный список приведен для доказательства того, что к эффективным электронным системам нельзя относиться, как к средству, которое не накладывает никаких ограничений на авто биль, не требует некоторого изменения его конструКЦи°” Однако обычно создаваемые электронные устройств приспосабливаются к конструкции автомобиля, в кот-83 рую априори считается недопустимым внесение каких либо изменений. Вероятно, такой подход не всегда целесообразен. Следует выявлять, разумное соотношение между изменениями в конструкции автомобиля и степенью сложности электронной системы. Разумеется поиск такого компромисса должен выполняться на базе экономических критериев с учетом безопасности движения, надежности автомобиля, технологических ограничений.
АБС дает водителю возможность уверенно чувствовать себя при торможении. Это приводит к выработке у водителя специфических навыков вождения (резком торможении, повышении скорости на поворотах и т. д.). Отказ АБС потребует от человека быстрой адаптации к изменению свойств автомобиля при торможении. В противном случае возможно ДТП. Следовательно, электронные устройства, значительно изменяющие навыки управления автомобилем, должны иметь повышенную надежность. Нельзя считать безопасным их отказ даже в случае, если автомобиль может быть допущен к эксплуатации согласно обычным нормам и требованиям (как, например, автотранспортное средство с неисправной АБС, но с работоспособной тормозной системой). Действительно, автомобиль может рассматриваться как исправный, но система автомобиль—водитель в данном конкретном случае, когда человек еще не привык к изменившимся свойствам автомобиля, ненадежна.
Отказ в работе электронной системы, изменяющей навыки управления, может сопровождаться появлением на индикаторах специальных инструкций, предостережений. По-видимому, допустимо введение временного автоматического запрещения некоторых действий водителя или режимов движения.
Автомобиль, оборудованный АБС, практически не оставляет при торможении следов на дороге, видимых без применения специального оборудования.
Это обстоятельство затрудняет расследование причин ДТП.
Управление осветительными приборами. Задача, стоящая перед разработчиками фар головного света, заключается в поиске и реализации конструкции, которая обеспечила бы достаточное освещение поля зрения водителя перед автомобилем и в то же время не вызывала ослепления водителей встречных транспортных средств. Традиционные методы решения этой задачи заключаются обычно в построении неуправляемой системы освещения. К ним можно отнести работы по совершенствованию светораспределения, принципиально новые системы освещения, например, поляризованного света и т. д.
Широкое внедрение электродных, автомобильных устройств позволило разработать автоматические системы управления осветительными приборами. Для автоматизации этих систем обычно применяют фотоэлементы, реагирующие на свет приближающегося автомобиля. Сигнал с фотоэлемента переключает освещение с дальнего света фар на ближний.
При разработке систем автоматического переключения осветительных приборов с дальнего света на ближний необходимо учитывать, что видимость водителем дороги в момент переключения света фар значительно ухудшается. Поэтому предложено устройство, уменьшающее яркость фар не скачкообразно, а постепенно.
Переход с дальнего света на ближний является не лучшим решением проблемы, так как дальность видимости дороги и препятствий на ней сокращается более чем в 2 раза. Современное развитие электроники позволяет пользоваться фарами дальнего света и вместе с тем не ослеплять водителя встречного автомобиля. Для этого на автомобиль предлагается устанавливать специальный датчик, с помощью которого определяется местоположение встречного автомобиля. В качестве чувствительного элемента такого датчика используется матрица из 32 фотодиодов. Свет фар встречного автомобиля освещает один из фотодиодов, что и позволяет локализовать его место расположения Луч света фар автомо.” биля проходит через фильтр, светопоглоща-ющие свойства отдельных участков которого изменяются электронным устройством управления. Функция этого устройства заключается в том, чтобы подавать команду на затемнение тех участков фильтра, через которые проходят лучи, попадающие на встречный автомобиль. Таким образом, из фар автомобиля выходит не один, как обычно, а два пучка света, между которыми расположен встречный автомобиль.
Другой путь по управлению световыми приборами связан с поворотом фар. Дальний свет при встрече с автомобилем не выключается, а фара, закрепленная на шарнирах, лишь поворачивается на небольшой угол вниз и вправо.
Для того чтобы свет обеих фар освещал дорожное полотно не только при движении по прямому, но и криволинейному участку дороги служат фары, поворачивающиеся в соответствии с поворотом рулевого колеса или в зависимости от поперечного ускорения.
Известно, что с изменением нагрузки на автомобиль направление лучей фар изменяется. В. 70-х годах были определены и рекомендованы международные нормативы по допустимому отклонению светотеневой границы пучка фары при варьировании нагрузки — Правила № 48 ЕЭК ООН. Для выполнения этих нормативов ряд фирм., изготавливающих вспомогательное автомобильное оборудование, выпустили . системы автоматического управления фарами.
В системе, предложенной фирмой «Бош», на автомобиль устанавливают индуктивные датчики, измеряющие расстояние между кузовом и мостом.
Сигнал от устройства переработки информации ЧИКается на закрепленную с одной стороны биметаллическою пластину, другой конец которой связан с фарой. Под’действием пропускаемого тока пластина изгибается I поворачивает фару вверх или вниз. Угол, на который поворачивается ось рефлектора, достигает 10°. Для образования сигнала обратной связи, показывающего действительное положение фары, использован потенциомет-рический датчик.
Электронные системы также автоматически включают приборы освещения при низком уровне освещенности. Система, автоматически включающая фары, устанавливалась еще в 1960 г. на автомобиле Быоик, причем уровень срабатывания устройства регулировался водителем. Система не реагировала на свет осветительных приборов проезжающих автомобилей.
В некоторых устройствах при выборе момента включения учитывается’не только освещенность, но и влажность воздуха.
Для предупреждения наезда на неподвижно стоящий автомобиль в ночное время предлагается схема устройства, включающего аварийный световой маячок или осветительные приборы неподвижного автомобиля при приближении к нему транспортного средства на расстояние 100—150 м. После проезда транспортного средства маячок неподвижного автомобиля выключается. Датчиком устройства является фотодиод, реагирующий на свет фар приближающихся автомобилей.
Правилами дорожного движения предусмотрено, что водитель транспортного средства, остановившегося на проезжей части в результате какой-то поломки или ДТП, предупреждает других водителей об этом установкой знака аварийной остановки или включением аварийной световой сигнализации. Однако, как показали исследования, подавляющее большинство водителей не выполняет данного пункта правил. Поэтому целесообразно, чтобы аварийная световая сигнализация, предупреждающая о происшедшем ДТП, включалась автоматически.
При разработке автоматического прибора предупреждения о нахождении неподвижного автомобиля на проезжей части основную сложность вызывает выбор Датчика. Обычно считают, что включение сигнала предупреждения должно осуществляться после «серьезной столкновения автомобиля с препятствием. Было вы лено, что в качестве датчика может использоваться’аВ” селерометр (датчик ускорения) и сигнал предупреждай ния следует формировать после того, как продольное ускорение автомобиля превысит 50 м/с2. Предлагается также расположить выключатель сигнала предупрежде. ния не в салоне, а под капотом. В этом случае водителю, которому хочется скрыться с места аварии, придется затратить больше времени на выключение аварийной сигнализации, что увеличивает вероятность его обнаружения.
Помимо систем, автоматически включающих осветительные приборы, предлагаются устройства, изменяющие их яркость с учетом уровня освещенности на дороге.
Управление зеркалом заднего вида. Водителя может ослепить свет не только встречного автомобиля, но и автомобиля, находящегося сзади. Луч света при приближении идущего сзади автомобиля отражается от зеркала заднего вида и попадает в глаза водителю. При этом ему приходится поворачивать зеркало, а потом возвращать его в прежнее положение. Чтобы избавить водителя от этой работы, в ФРГ предложена система, автоматически закрывающая зеркало полупрозрачной или темной шторкой. Шторка перемещается электромагнитом, который управляется ‘фотоэлементом.
Другое решение данной задачи найдено японскими специалистами. На панель из жидких кристаллов с одной стороны напыляется алюминий, образующий зеркальную поверхность. Водитель смотрит на зеркало через слой жидких кристаллов, прозрачный в обычном состоянии. При приближении едущего сзади автомобиля свет его фар воспринимается фотоэлементом, сигнал с которого служит командой подачи высокого напряжения на панель из жидких кристаллов. В результате жидкие кристаллы начинают рассеивать свет и яркие лучи не попадают в глаза водителя.
Управление сигналом торможения. Водителю важно знать режим движения едущего впереди транспортного средства. Для предупреждения о его торможении служит фонарь (фонари) сигнала торможения (стоп-сигнала).
Неудовлетворенность водителей традиционными средствами индикации показывают результаты исследования, проводившегося в США, когда 93% опрошенных высказались за введение стоп-сигнала, информирующего об интенсивности торможения.
Известно несколько подходов к кодированию информации о степени замедления впереди едущего автомобиля. Один из способов кодирования заключается в том, что свет стоп-сигнала сделан прерывистым. Частота световых импульсов зависит, от степени замедления. Чем интенсивнее процесс торможения, тем чаще мигают лампы. Минимальная частота соответствует остановке на обочине. Авторы данного предложения считают, что использование пульсирующего сигнала торможения уменьшает время реакции водителя, привлекает большее внимание. Очевидно, что максимальная частота вспышек света должна быть ниже 16 Гц, когда импульсы перестают различаться глазом. Исходя из этого факта предельной частотой, соответствующей замедлению 5 м/с2, принято 8 Гц.
При другом способе кодирования устанавливается связь между отрицательным ускорением автомобиля (давлением рабочего тела в тормозной системе) и количеством ламп, загорающихся в стоп-сигнале. В этом случае стоп-сигнал может занимать всю ширину автомобиля. При первом соприкосновении ноги водителя с педалью тормоза загорается центральная лампа. При среднем по величине усилии на педаль тормоза загорается еще по одной лампе с каждой стороны от центра. При резком торможении загораются также и крайние лампы. Имеются и другие предложения об отображении значения замедления, например, изменением яркости света или цвета стоп-сигнала.
При торможении двигателем стоп-сигнал не горит, хотя скорость автомобиля может резко уменьшиться. Поэтому возможно применение еще стоп-сигнала, включающегося при торможении двигателем, или включение
Серьезным недостатком подобных предложении следует считать необходимость нормирования для всех автомобилей зависимости частоты световых импульсов (количества зажженных фонарей и т. п.) от интенсивности торможения. Только в этом случае водители смогут запомнить эту зависимость и прогнозировать движение автомобиля, движущегося впереди. Если же одной величине замедления будет соответствовать множество частот на различных автомобилях, то водитель окажется не в состоянии количественно оценить интенсивность торможения. Он будет информирован лишь о качественном изменении режима движения.
К экономическим ограничениям широкого применения данных систем относятся необходимость в датчике замедления для .измерения отрицательного ускорения автомобиля, уменьшение срока службы ламп из-за работы в импульсном режиме, увеличение количества ламп и т. д. Значительную техническую сложность представляет компенсация’погрешности показаний большинства простых -акселерометров от продольного наклона кузова, возникающего при уклоне, в процессе торможения.
Управление стеклоочистителем. При слабом дожде или снеге влага на ветровом стекле накапливается медленно и частая работа стеклоочистителя нецелесообразна, так как возможны перегрев электродвигателя из-за повышенного трения между щетками .и стеклом, появление царапин, увеличение износа щеток и т. д. Для уменьшения трения между щетками и ветровым стеклом предложены электронные системы, позволяющие регулировать интервал между ходами щеток стеклоочистителя, автоматически сокращать интервал между движениями щеток при увеличении скорости автомобиля. Имеются системы, обеспечивающие включение стеклоочистителя при включении стеклоомывателя и включение наружных осветительных приборов при работе стеклоочистителя Г61.
Первая программа — это обычная непрерывная работа стеклоочистителя. Во второй программе между двумя ходами щеток делается пауза, которая может регулироваться поворотом ручки потенциометра-от О до 12 с, причем с увеличением скорости автомобиля эта пауза автоматически сокращается. В третьей программе после того, как водитель нажмет соответствующую кнопку на приборной панели, начинает действовать омыватель стекла. До тех пор, пока кнопка нажата, вода насосом подается импульсами в промежутке между ходами щеток. После того, как кнопка отпущена, начинается пятисекундный период очистки и сушки стекла, а затем щетки возвращаются в исходное положение.
Рассмотренное устройство является примером правильного подхода к автомобильным электронным системам. Функции, выполняемые электронным прибором-, не копируют работу механического или электромеханического аналога. Они предоставляют человеку больше возможностей. Таким образом, переход на новую элементную базу должен сопровождаться тщательным рассмотрением и анализом функций, которые должен реа-лизовывать электронный прибор. Следует учитывать индивидуальные особенности человека, весь спектр возможных состояний внешней среды и т. д.
ЭУ предотвращения запотевания заднего стекла. Большую сложность для водителя представляет устранение запотевания заднего стекла. Поэтому разработа-н г устройства автоматического предотвращения запотевания заднего стекла. Например, в системе, прел женной концерном «Ниссан» и устанавливаемой на томобиле Седрик—Глория, запотевание обнаруживае*3 ся датчиком, электрическое сопротивление которог” снижается при попадании на него влаги. При пониже° нии сопротивления до определенного значения автоматически включается устройство обогрева стекла.
Обнаружение объектов вне зоны видимости. Электронные устройства для обнаружения объектов вне зоны видимости водителя можно разделить на позволяющие водителю увидеть область, недоступную для -наблюдения из кабины автомобиля и сигнализирующие о препятствии. Принципы работы устройств очень разнообразны. Используются волоконная оптика, телевизионная, ультразвуковая и лазерная техника, радиолокационные устройства.
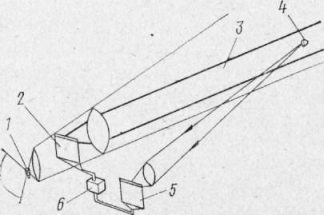
В одном из приборов, созданном в США, для наблюдения за местностью применяется принцип перископа. Линзы закрепляются на высоких стойках по обе стороны, ветрового стекла. К линзам подсоединяют световоды, передающие изображение в кабину на переднюю панель. Водитель ручкой управления через систему рычагов может изменять положение стоек и линз. В результате он видит обстановку, сложившуюся сзади автомобиля.
Для обнаружения препятствий при движении задним ходом концерном «Форд» предложено использовать оптический локатор на базе импульсного инфракрасного лазера мощностью 5 Вт. Однако наибольшее распространение получили радиолокационные системы, обеспечивающие водителя сведениями об объектах, находящихся в боковой и задней слепых зонах. Известно устройство, обнаруживающее на соседней полосе автомобиль на расстоянии 12—18 м. Звуковая и световая сигнализации включаются лишь при наличии транспортного средства, приближающегося со скоростью 35—40 км/ч. Система не реагирует на отстающие автомобили и неподвижные объекты.
улучшение слышимости сигналов оповещения. Водитель не всегда может услышать звуковой сигнал, подаваемый другими транспортными средствами, в том числе и обладающими определенным приоритетом (автомобилями скорой помощи, пожарными машинами и т. п.). Плохая слышимость может быть связана с хорошей звуконепроницаемостью кабин, значительной длиной автопоезда, установкой кондиционеров (включение кондиционеров приводит к необходимости закрывать стекла) и, конечно, недостаточной громкостью звукового сигнала. Поэтому разработаны устройства, позволяющие улучшить слышимость сигналов оповещения.
Приборы, предназначенные для улучшения слышимости сигналов оповещения, можно разделить на активные и пассивные. Активные устройства предназна-чены^‘для усовершенствования качества подаваемого звукового сигнала. Например, интенсивность сигнала может зависеть от скорости движения. На малой скорости достаточно негромкого звука, а при большой скорости автомобиля, когда предупреждение должно быть услышано на значительном расстоянии, громкость следует увеличить. Поэтому в США на некоторых автомобилях устанавливают приборы, изменяющие мощность звукового сигнала в зависимости от скорости движения.
В автомобиле Лагонда варьируется тональность звукового сигнала. Высокие тона используются при движении за пределами города, а низкие — в черте города.
Пассивные устройства предназначены для улучшения слышимости сигналов оповещения. В качестве примера такого устройства можно рассмотреть прибор итальянской фирмы «Магнети Марелли» («Magnet; Маrelly»), устанавливаемый в обязательном порядке на всех грузовых автомобилях длиной свыше Ими грузоподъемностью более 3,5 т. Система предупреждает водителя грузовика об обгоне.
Применение электроники позволяет использовать для подачи сигналов оповещения не только увеличивающие уровень шума звуковые сигналы. Возможен бесшумный сигнал оповещения. Для этого на автомобили, обладающие правом преимущественного проезда, устанавливаются радиопередатчики. При включении радиопередатчика в громкоговорителях приемников транспортных средств, оказавшихся в радиусе действия, создается шум, который может модулироваться сигналом сирены или человеческим голосом.
Управление скоростью. В ряде случаев скорость ав-^ томобиля следует устанавливать меньше допустимого правилами и дорожными знаками значения. Но человек в силу своих психофизиологических возможностей не в состоянии точно определить соответствующие данному автомобилю и конкретному дорожному покрытию предельно допустимые по условиям безопасности значения скорости движения и дистанцию до двигающегося впереди транспортного средства. Превышение скорости или уменьшение дистанции может привести к ДТП.
ДТП может произойти и из-за недостатка информации о дорожной ситуации. Из опроса американских водителей, проводившегося в США, совершивших наезд на автомобиль, выяснилось, что 45% из них его не видели в момент наезда и обнаружили его только после аварии. Столь большой процент ДТП нельзя объяснить только невнимательностью водителей. Скорее всего здесь сказываются ограниченность восприятия информации у значительной части водителей. Поэтому количество наездов, несмотря на принимаемые организационные мероприятия, может оставаться значительным.
Действенной мерой по снижению наездов является оснащение автомобиля устройствами, помогающими водителю в управлении скоростью. Работы по созданию приборов для правильного выбора скорости и дистантся давно. Создано много устройств, работаю-и”“ “по разным принципам. Действие одних устройств ш“хваН0 на вычислении только длины тормозного пути, например, на ветровое стекло проецируются две вертикальные линии, расстояние между которыми изменяет-ИКЗ в зависимости от скорости. Водителю необходимо Цедить только за тем, чтобы ширина впереди идущего автомобиля вписывалась между линиями. К принципиальным недостаткам данного прибора следует отнести то что в нем не учитывается различная ширина автомобилей в зависимости от их моделей.
В другом устройстве на ветровом стекле высвечивается горизонтальная линия, показывающая, где остановится автомобиль при торможении. Автомобиль, к-оторый движется впереди, должен находиться за этой линией. Результаты прогноза тормозного пути при подобной индикации зависят от продольного уклона дороги и продольного наклона кузова автомобиля. Описанные устройства можно назвать пассивными, так как в выполняемые ими функции не входит обнаружение препятствия.
Разработаны и активные системы, работа которых основана на обнаружении препятствия (лидирующего автомобиля).
В основном эти системы предназначены для решения двух задач:
— уменьшения скорости для предотвращения столкновения (экстренное торможение);
— управления скоростью для поддержания безопасной дистанции между автомобилями в транспортном потоке.
В методах решения этих задач можно выделить три направления. Известны системы, информирующие водителя о параметрах движения лидирующего автомобиля (скорости, расстоянию до него), об относительной скорости между автомобилями и т. д. Данные системы не нашли широкого применения, поскольку значительно увеличивают информационную нагрузку водителя.
Наибольшее распространение получили автоматизированные системы, при помощи которых управление скоростью осуществляется в полуавтоматическом режиме. Автоматизированные системы предупреждают водителя, подавая звуковые и световые сигналы о появлении препятствия в опасной близости от автомобиля.
В автоматизированных системах данного типа, по мимо подачи сигналов тревоги, водителю могут предоставляться те же сведения, что и в системах, информирующих о параметрах движения лидирующего автомобиля. Применение автоматизированных систем особенно эффективно в условиях плохой видимости.
Разработаны автоматические системы, которые изменяют -скорость движения без вмешательства водителя.
В автоматических системах предотвращения столкновений вырабатывается сигнал на уменьшение скорости при двух условиях, когда:
— расстояние до препятствия с учетом скорости автомобиля и его тормозного пути является критическим;
— скорость автомобиля относительно препятствия с учетом расстояния до него и тормозного пути является критической.
Уменьшение скорости происходит благодаря автоматическому управлению тормозами, дроссельной заслонкой, коробкой передач. В некоторых системах автоматического поддержания безопасной дистанции расстояние между автомобилями выбирается с учетом состояния дороги и скорости движения автомобилей.
К автоматизированным и автоматическим системам предъявляются следующие требования. При их работе должна обеспечиваться плавность движения на безопасной дистанции до находящегося впереди автомобиля при средней интенсивности движения, устойчивость управления в широком диапазоне изменения скорости и при кратковременном отсутствии информации об условиях движения лидирующего автомобиля. Система должна действовать лишь, когда расстояние до впереди идущего автомобиля меньше определенного условиями безопасности движения. Следует предусмотреть возможность отключения этой системы водителем. Система управления скоростью должна работать как совместно с системой экстренного торможения, так и независимо от нее.
Промышленный выпуск автоматических систем управления скоростью начат в 1970 г. американской фирмы «Бентли» («Bentley Associates of Chelmsford»). П° я управления положением педали тормоза и дрос-льной заслонкой используется разрежение во впуск-с6“1 трубопроводе. Система работает в двух режимах. При движении на загородных дорогах торможение начинается, если расстояние до автомобиля или препятствия меньше 45 м. В режиме, соответствующем городскому движению, команда на торможение подается при расстоянии 9—12 м. Водитель предупреждается о торможении звуковым сигналом. Сигнал подается даже при отключенной системе автоматического торможения.
Водитель может отключить систему в сложной дорожной обстановке (например, при гололеде), когда считает целесообразным самостоятельно осуществлять торможение. Система автоматически отключается микровыключателем, установленным на педали управления дросселем, при обгоне, объезде препятствия. При испытаниях системы было выявлено, что автомобили останавливаются перед препятствием на расстоянии 2,5— 3 м, а поддерживаемая дистанция равняется нескольким метрам.
Автоматические системы имеют определенные преимущества перед автоматизированными устройствами управления скоростью. Время срабатывания автоматических систем существенно меньше времени реакции водителя, которое может еще увеличиваться в процессе движения в зависимости от болезненного состояния человека, психофизиологической подготовленности, утомления, низкой освещенности дороги и др.
Достоинством автоматизированной системы является то, что в процессе ее эксплуатации водитель не утрачивает навыков управления «обычным» автомобилем и при отказе электроники он в состоянии надежно вести автомобиль. Поэтому автоматическая система, выполняющая торможение, должна работать таким образом, чтобы водитель не ослаблял -внимание. Для этого критическое расстояние до препятствия, по достижении которого подается команда на автоматическое торможение, выбирается несколько меньшим расстояния, на котором внимательный водитель начинает торможение. В этом случае хороший водитель как бы не замечает Галичия в автомобиле автоматической системы торможения, поскольку опережает ее дейетвия.
Как показывает опыт эксплуатации автоматических систем, привыкнув к автомату, водители переносят на него большую часть работы по торможению. Это положение, естественно, и вытекает из особенностей психологии человека. Поэтому надеяться в будущем на то, что водители не будут использовать устройства, которые’ могут выполнять за них какие-либо функции, по-видимому, не следует.
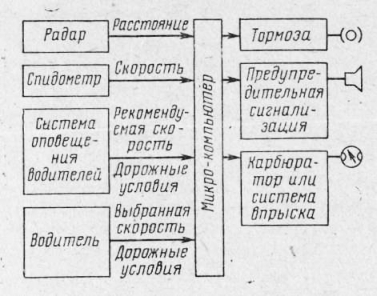
Работа систем управления скоростью построена на вычислении тормозного пути, определении относительной скорости между автомобилями (автомобилем и препятствием) и расстояния до препятствия (между автомобилями). Действительно, для того, чтобы дистанция до лидирующего автомобиля оставалась постоянной, надо в качестве сигнала рассогласования использовать значение относительной скорости. Лидирующий автомобиль может изменять скорость. Соответственно должна изменяться и безопасная дистанция между автомобилями. Поэтому в процессе работы системы может вычисляться тормозной путь и сравниваться с расстоянием до лидирующего автомобиля. Если расстояние меньше команда на снижение скорости с интенсивностью, пропорциональной разности между скоростями. Одна из возможных систем управления скоростью показана на рис. 4.
Для определения относительной скорости и расстояния между автомобилем и препятствием (лидирующим автомобилем)
вменяют акустические, оптические приборы и радио-П аторы. При этом наиболее часто используется явле-Доплера,’ заключающееся в том, что изменение относительной скорости между передатчиком и премнико.м сопровождается определенной вариацией частоты волны Измеряя частоту посланного и принятого сигналов, находят скорость автомобиля относительно препятствия (лидирующего автомобиля).
Если относительная скорость равна скорости движения, то впереди находится неподвижный предмет или объект, движущийся в перпендикулярном направлении.
При использовании одного из акустических локаторов из антенны посылается сигнал с-частотой 40 кГц. Отразившись от препятствия, сигнал меняет частоту в зависимости от относительной скорости (изменение равно 60 Гц на 1 км/ч). Отраженный сигнал принимается антенной приемника и передается на усилитель, диод-смеситель, за которым следует фильтр, не пропускающий частоту 40 кГц. Таким образом, на выходе приемного устройства оказывается пропорциональный относительной скорости сигнал с частотой, равной разности частот переданного и полученного сигналов.
В оптических приборах широко применяется лазерная техника. Возможны два способа обнаружения препятствия. При первом способе сигнал, посланный лазером, отражается от находящегося впереди препятствия и воспринимается приемным устройством. Именно так работает система концерна «Форд», в которой используется полупроводниковый лазерный диод. На диод подается в течение 0,3 мкс импульс тока с амплитудой 100 А. Отраженный импульс света воспринимается инфракрасным датчиком (фотоэлементом). Относительная скорость может быть определена по сдвигу частоты, а расстояние до препятствия — по времени между посылкой и приемом сигнала.
При втором способе датчиком принимаются сигналы, не отраженные от автомобиля, а генерированные ответчиком (приемопередатчиком, установленном на лидирующем автомобиле). Для этого следует на всех автомобилях установить лазеры и датчики. Луч света от лазера воспринимается фотоэлементом лидирующего автомобиля.
Обзор автомобильных радиолокационных станци выполнен в работе. Из обзора видно для управления скоростью применяются модулированные сигналы, известны системы с одной антенной й раздельными передающей и приемной антеннами (двух-позиционные РЛС), непрерывные и импульсные устройства. Так же, как и в лазерных системах, приемным устройством может восприниматься отраженный от препятствия сигнал или сигнал ответчика.
В системе концерна «Форд», работа которой основана на анализе отраженного сигнала, диод Ганна выдает сигнал частотой 10 ГГц. Приемная антенна улавливает отраженный сигнал, частота которого примерно равна величине относительной скорости автомобиля, умноженной на число 19. Принятый сигнал усиливается и проходит через высокочастотный фильтр с частотой отсечки 450 Гц. Этот фильтр не пропускает сигналы помехи. Для устранения сигналов с малой амплитудой, которые получены от небольших предметов, не представляющих опасности, применяется пороговый усилитель.
В запросно-ответных системах ответчик устанавливается в ‘задней части транспортного средства. Обычно ответчик представляет собой приемопередатчик, который, восприняв сигнал, передает его обратно с двойной частотой. Могут также применяться пассивные ответчики, представляющие собой отражатели из параллельных металлических проводов, расположенных на определенном расстоянии от металлической пластины, уголковые отражатели и т. д.
К недостаткам запросно-ответных систем следует отнести необходимость установки ответчиков не только на всех автомобилях, но и на возможных препятствиях (например, ограждениях). Ответчики должны иметь пешеходы, велосипедистыы и др. Неисправность ответчика, поворот находящегося впереди автомобиля, нахождение на дороге какого-либо предмета могут привести к ДТП. Достоинством систем с ответчиком является то, что их легко приспособить для выдачи электронного номера автомобиля, представляющего собой индивидуальный код транспортного средства. Этот электронный мер при необходимости постоянно передаваемый усыновленным на автомобиле радиопередатчиком, может та оЧЬ обнаружить угнанные автомобили и наблюдать п местоположением автомобиля.
В качестве антенн используют рупоры и плоские решетки, выполненные в виде печатной платы. Загрязнение обледенение антенны ухудшают ее свойства. Для защиты антенны от грязи, пыли, камней, влаги используют плоские или сферические-обтекатели. Однако применение обтекателей приводит к ухудшению параметров системы.
Известно большое количество разнообразных РЛС. Для получения узких диаграмм направленности при малых размерах антенн применяются частоты 5— 60 ГГц. Мощность передающего блока РЛС устанавливается обычно из расчета надежного обнаружения препятствий на расстоянии до 150 м. Эта величина выбрана из соображений, что при скоростях, допустимых в условиях плохой видимости, л-акого расстояния вполне достаточно для экстренного торможения. Так, при скорости движения 100 км/ч, замедлении 5 м/с2 и времени реакции водителя, равном 1 с, для предотвращения столкновения препятствие необходимо обнаружить на расстоянии 100 м.
Разработка устройств управления скоростью связ на с решением ряда сложных проблем. Специфика пЭ боты этих устройств на автомобиле (вибрации, пеп’е грузки, повышенная температура, «броски» напряжения в сети питания и т. д.) требует тщательной изоляции экранирования, применения герметизированных корпусов, амортизаторов, стабилизаторов напряжения и т. д Выполнение данных мероприятий приводит к нежелательному удорожанию, оборудования, увеличению размеров электронных узлов.
Очень жестки требования, предъявляемые к устройствам.
Автоматические и автоматизированные системы торможения должны обладать:
— защищенностью от ложных срабатываний в неопасных ситуациях;
— защищенностью- от сигналов, получаемых при мгновенном облучении;
— возможностью выработки сигналов торможения с учетом скорости движения автомобиля, скорости сближения, состояния дороги на таком расстоянии от препятствия, чтобы скорость столкновения была безопасной;
— включением системы лишь после достижения определенной скорости;
— отключением системы водителем.
Часть этих требований не выполнена до сих пор. Это объясняется рядом объективных причин. Условия работы автомобильных устройств управления скоростью существенно сложнее, чем радаров, устанавливаемых на самолетах, судах, где осуществляется локация свободных от помех участков воздушного пространства и водной поверхности. Автомобильные же системы управления скоростью должны функционировать в условиях дороги, рядом с которой расположены столбики ограждения, дорожные знаки, находящиеся на обочине транспортные средства, деревья, здания и т. п. Сигналы, получаемые при отражении радиоволн от этих объектов, неровностей дороги, представляют собой помехи, вызывающие ложные срабатывания исполнительных.
Разработке систем управления скоростью препятствует недостаточная изученность: оптических и радиоспектральных характеристик дорог и обочин при сканировании под малыми углами к горизонту; отражающих свойств автомобилей и других объектов, которые находятся на дороге; характеристик придорожного атмосферного слоя по пропусканию излучений.
Уровень отраженного сигнала в PJ1C зависит не только от расстояния до обнаруживаемого объекта, но и от его размеров (эффективной площади рассеяния). Поэтому крупные объекты, находящиеся на достаточно большом расстоянии, могут тем не менее вызвать экстренное торможение и, наоборот, может произойти столкновение с малыми объектами. Большое влияние оказывает и ракурс автомобиля. Особую сложность представляет учет данных особенностей в условиях городского движения, где много зданий и автомобили находятся под различными углами.
С помощью эффекта Доплера нельзя обнаружить автомобиль, движущийся впереди в том же направлении и равной скоростью. Сложно отличить неподвижное препятствие от транспортного средства, движущегося в перпендикулярном направлении.
Серьезную опасность при широком внедрении радиолокаторов представляет возможное взаимное влияние радиосигналов устройств, установленных на различных автомобилях. Однако проверка этого предположения может быть осуществлена только в процессе длительных одновременных испытаний многих автомобилей, оборудованных подобными приборами. Не исключено также и нежелательное воздействие локаторов на электронную аппаратуру, установленную в домах (на ЭВМ, телевизоры, радиоприемники, магнитофоны и т. д.).
Большую сложность при разработке систем управления скоростью представляет то, что безопасное расстояние до впереди идущего автомобиля определяется рядом пардметров, которые не могут быть оперативно измерены и изменяются во времени. К ним относятся время реакции водителя (в информирующих и автоматизированных системах), время срабатывания тормозов обоих автомобилей, состояние дорожного покрытия.
Время реакции водителя может лежать в широких пределах: от 0,2 с до нескольких секунд. При неожиданном появлении препятствия время реакции в светлое время составляет 1,2—1,4 с. Время срабатывания тормозов и коэффициент сцепления шин с дорогой также изменяются в широких пределах, а дешевые датчики, позволяющие постоянно в условиях движения измерять эти величины, отсутствуют.
В связи с указанными причинами системы управления скоростью не дают возможности получить абсолютно точные значения необходимого момента начала торможения и при их разработке часто исходят из наихудшего варианта. Например, в автоматизированном устройстве фирмы «BDO» подача звукового сигнала водителю об уменьшении расстояния до предельно допустимого значения выполняется с учетом времени реакции водителя, равном 1,5 с. Сведения о дорожных условиях (сухая или влажная дорога, гололед) водитель, вводит перед началом движения. Если водитель забудет это сделать, устройство будет ориентироваться на худший случай — гололед. По мере сближения автомобиля с находящимся перед ним объектом громкость звуковой сигнализации увеличивается.
Известно большое количество предложений по улучшению помехозащищенности систем. В простых системах учитывается, что сигналы помехи в большинстве случаев бывают малыми по величине и однократными. Поэтому команда на подавление помех может формироваться после проверки превышения уровня сигнала заданного порогового значения в течение определенного времени. В более сложных системах приемник воспринимает лишь сигналы, соответствующие заданной дальности действия РЛС. Для последующего выделения помех излучаемые сигналы кодируют. При этом приемное устройство построено таким образом, чтобы отфильтровывать только те из полученных сигналов, которые имеют тот же код.
Используется корреляционный анализ посланных и принятых сигналов. Определенные преимущества в области повышения помехозащищенности систем дает применение запросно-ответных систем. Уменьшает вероятность ложных срабатываний наличие раздельных приемной и передающей антенн.
На повороте дороги в зоне приема могут оказаться объекты, расположенные за обочиной. Из-за отражения лучей от этих объектов возможны ложные срабатывания системы. Для исключения помех в подобных ситуациях на транспортное средство устанавливают датчики, измеряющие угол поворота рулевого колеса, угловые скорости вращения передних колес, поперечное ускорение. Сигнал с датчика изменяет дальность действия локаторов в зависимости от радиуса кривизны дороги.
Дальность действия локатора должна варьироваться и в зависимости от интенсивности дорожного движения. Для автоматического управления дальностью в местах изменения интенсивности движения (например, на въездах и выездах из города) устанавливают специальные указатели. Эти указатели монтируются на полотне дороги и представляют собой магнитные элементы. На поверхность дороги наносят поперечные полосы, имеющие иной коэффициент отражения света и т. д.
Принципиально новый подход к проблеме повышения помехозащищенности, разрабатываемый американскими специалистами, основан на имитации процесса распознавания человеком препятствий на дороге. Для того чтобы система могла отличать реальные опасные объекты от прочих, ее необходимо этому «научить». Обучение заключается в введении в память устройства большого количества разнообразных радиолокационных изображений, которые могут встретиться на дорогах.
При приеме сигнала определенной формы и значения специальная программа сравнивает его с имеющимися в памяти изображениями и таким образом идентифицирует препятствие.
Для реализации подобной системы, основанной на классификации и распознавании образов, требуется ЭВМ с большим объемом памяти и высоким быстродействием, что Обусловлено необходимостью функционирования в реальном масштабе времени.. Широко используемые электромеханические запоминающие устройства (магнитные диски, ленты) не могут применяться в подобных системах в связи с малым быстродействием и низкой надежностью, большим потреблением тока и т. д.
Однако все большее распространение получают полупроводниковые запоминающие устройства. Постоянное снижение их стоимости дает реальную возможность создания на базе микропроцессорной техники подобных систем управления скоростью с доступной ценой.
Работы в области создания систем управления скоростью ведутся весьма интенсивно. Но ожидать быстрых успехов в создании систем с высокой надежностью не приходится. Острой проблемой является создание по-мехозащищенных и надежных устройств.
Имеются и другие препятствия на пути внедрения систем управления скоростью. Широкое применение радиолокаторов н-а автомобилях может привести к появлению проблемы микроволнового загрязнения атмосферы (микроволнового смога), не только создающего помехи для радиоэлектронной аппаратуры, но и опасного для здоровья человека. Для уменьшения взаимных помех локаторов и уровня радиации предложено системы управления скоростью включать только при движении за городом.
При использовании систем, автоматически поддерживающих безопасное расстояние между автомобилями, и устройств автоматического торможения возникают проблемы психологического и юридического плана. Человек может очень быстро привыкнуть к подобным устройствам, постоянно надеяться на их помощь и даже дисквалифицироваться как водитель. При внезапном отказе устройства в связи с моральной неподготовленностью и низкой квалификацией водителя возможно возникновение ДТП. Можно ли в этом случае считать водителя единственным виновником аварии?
Однако возможности и удобства, получаемые с помощью автоматизированных и автоматических систем управления скоростью, настолько велики, что необходимость их широкого внедрения не вызывает сомнений. Их применение позволяет водителю безопасно и в то же время полностью использовать скоростные свойства автомобиля. Вследствие этого повышается эффективность использования автомобильных дорог и транспортных средств. Уменьшается количество ДТП, а материальные потери от тех ДТП, которые все-таки произойдут, будут существенно ниже, так как торможение будет начинаться раньше. Уменьшается психофизиологическая и физическая загрузка водителя, что не только облегчит его тяжелую и ответственную работу, но и повысит надежность работы человека по выполнению оставшихся после автоматизации управления скоростью функций.
Предотвращение неправильных действий водителя и пассажиров. Известны устройства, блокирующие те действия находящихся в автомобиле людей, которые могут привести к нежелательным последствиям. Можно выделить два подхода к выбору недопустимых ситуаций.
При одном подходе электронные устройства ограничивают действия, которые могут выполняться человеком специально. Примером такого прибора, блокирующего не только случайные, но и преднамеренные нарушения правил дорожного движения, служит ограничитель, не позволяющий водителю превышать некоторое значение скорости. Устройства блокировки «сознательных» действий людей не нашли широкого применения, за исключением, конечно, случаев, когда их установка регламентировалась законодательством, таких как ремней безопасности. В системах блокировки не учитывается особенность психики человека, заключающаяся в отрицательном отношении к запретам.
Не всегда реализуемые устройством ограничения разумны и повышают безопасность. При эксплуатации автомобиля возможны ситуации, когда нарушение ограничений может стать целесообразным. Учет же всех возможных ситуаций, в которых ограничение допустимо и оправдано, в ряде случаев приводит к очень сложным и громоздким условиям. Формализация этих условий и их последующая реализация в виде электронного прибора могут вызывать определенные сложности.
Более перспективным, на наш взгляд, является другой подход в развитии систем предотвращения неправильных действий. Он основан на построении устройств, не допускающих случайные действия, ошибки водителя и пассажиров. В качестве примера такого устройства может рассматриваться прибор, устанавливаемый на автомобилях концерна «Ниссан». Он автоматически блокирует замки дверей при скорости движения более 10 км/ч. Для управления включением механизма блокировки поименяются контакты,. установленные в спидометре. При скорости, превышающей 10 км/ч, эти контакты размыкаются и выдают команду блокировки.
Развитие систем, блокирующих ошибочные действия людей, находящихся в автомобиле, представляется важным направлением работ по повышению безопасности движения. Особое внимание следует уделять поиску признаков, с помощью которых можно выявитьv ошибочные действия водителя по управлению автомобилем.
Управление ремнями безопасности. Работы по созданию систем активной безопасности не увенчались пока полным успехом. Поэтому большое внимание в автомобилестроении уделяется повышению пассивной безопасности автомобиля. Вводятся легко деформируемые при столкновении автомобиля с препятствием элементы кузова, рулевого управления, механизмы, позволяющие открывать двери после аварии, и т. д. Но принятие данных мер не исключает возможности удара водителя и пассажиров об элементы автомобиля. Для ограничения- их перемещения относительно автомобиля при динамических нагрузках используются ремни и мешки безопасности.
Наибольшее распространение получили ремни безопасности, но практика показала, что не все водители их пристегивают. Поэтому в США стала выпускаться электронная система, напоминающая подачей звукового сигнала о непристегнутых ремнях. Оказалось, что эффективность подобного прибора невысока. Устройство, названное «Интерлок» (США) работает по другому принципу. Оно блокирует пуск двигателя до тех пор, пока находящиеся на переднем сиденье пассажир и водитель правильно не закрепят ремни.
Концерн «Дженерал моторе», помимо электромеханической системы, разработала и систему, использующую электронику. Применение принципов электроники позволило разработать приборы, исключающие обман со стороны водителя и пассажира (например, ремень прикреплен, но не удерживает человека, так как он сидит на нем). Устройства также выявляют ситуации, когда пассажир на переднем сиденье отсутствует или когда разрешается не применять ремни.
Опишем работу нескольких устройств. В ремне безопасности концерна «Форд» на месте, соответствующем груди водителя, расположен кварцевый ультразвуковой передатчик. Сигнал передатчика воспринимается приемным устройством, находящимся в рулевой колонке.
В сиденье имеется микропереключатель, контакты которого замыкаются под действием массы человека. Логическое устройство выключает зажигание, если эти цепи разомкнуты. Исключение составляют случаи, когда автомобиль стоит, движется задним ходом или включена низшая передача.
В блокировочном устройстве концерна «Фольксваген» проверяется соблюдение определенной последовательности действий водителя и пассажира — от посадки на сиденье и закрепления ремней безопасности до включения двигателя и изменения положения рукоятки ручного тормоза. Система, кроме выполнения основных требований, имеет и’ усовершенствования, например, после перерыва, не превышающего 3 мин, предусмотрена возможность пуска двигателя независимо от положения ремней безопасности. Эта возможность используется в случаях, когда надо загнать автомобиль в гараж. Водитель выключает двигатель и выходит из автомобиля, чтобы открыть дверь гаража. Вновь пустив двигатель, водитель, не застегивая ремней, может поставить автомобиль в гараж. Допускается возможность с пристегнутыми ремнями на 10—30 с приподняться на сиденье для изменения позы, поиска наилучшего положения.
Представляет интерес алгоритм работы системы индикации, применяемой в данном устройстве. При попытке пуска двигателя с непристегнутыми ремнями подается предупредительный звуковой сигнал и загорается, как в самолете, световое табло с надписью «Пристегните ремни». Предупредительный сигнал появляется и при отстегивании ремней во время движения. Если двигатель включен, но автомобиль стоит, отстегивание ремней не вызовет подачи предупредительного сигнала, так как автомобиль может остановиться на достаточно длительный срок, например, перед железнодорожным переездом.
В некоторых устройствах типа «Интерлок» предусмотрены кнопка отключения прибора при его неисправности и возможность пуска двигателя независимо от состояния ремней при нейтральном положении коробки передач.
Несмотря на огромное количество выпущенных устройств блокировки зажигания при незастегнутых ремнях безопасности, их обязательное применение было отменено. Вместо систем типа «Интерлок» регламент-ровано применение прибора, сигнализирующего световым сигналом о том, что ремни не пристегнуты.
Причин отказа от устройств блокировки зажигания называется много. Высказывались претензии к надежности аппаратуры, наличию чувства дискомфорта при использовании ремней безопасности. Значительные сложности вызывала неоднозначность требований к алгоритму работы устройства блокировки и т. д.
Несмотря на отказ от систем типа «Интерлок», регламентирование их применения послужило мощным толчком к разработке автомобильных электронных устройств.
В связи с отказом от принудительной установки устройств блокировки зажигания, а также для устранения неудобств, связанных с использованием традиционных (пассивных) ремней безопасности, разрабатываются конструкции так называемых активных ремней. Эти ремни автоматически застегиваются при ударе или в течение малого отрезка времени, предшествующего столкновению. Так работает падающий ремень, который за несколько миллисекунд закрепляет верхнюю чабть туловища (одновременно может удерживаться голова) и прижимает нижние конечности к сиденью. Электронные устройства управления активными ремнями схожи с приборами, применяемыми в системах управления воздушными подушками.
Управление воздушными подушками. Пассивные ремни безопасности выполняют свою основную функцию лишь при аварии автомобиля, а должны быть закреплены в течение всей поездки. Воздушные же мешки (надувные подушки) используются лишь при ударе. В остальное время положение водителя и пассажиров в автомобиле не ограничивается. Наполненный воздухом мешок предохраняет человека от травм благодаря своей упругости. После столкновения воздух выпускается из подушек. Мешок, предназначенный для водителя, может помещаться в рулевом колесе, а для пассажира, сидящего на переднем сиденье, — на передней панели.
Для подачи сигнала на наполнение подушки воздухом применяются разнообразные , датчики, которые милм.х разделить на фиксирующие момент столкновения “(контактные) и прогнозирующие удар автомобиля.
1 Принцип действия простого механического датчика, фиксирующего столкновения, основан на том, что подвешенная масса притянута постоянным магнитом. Эта масса отделяется от магнита при превышении ускорением заданной величины. Отделившийся грузик соприкасается с находящейся рядом пластиной, что приводит к замыканию электрической цепи.
Конструкция срабатывает даже, если удар происходит под углом 60° к выбранному при ориентации датчика направлению.
Работа датчика столкновения может быть основана на использовании пьезоэффекта. В этом случае некоторая масса, контактируя с кристаллом, оказывает на него давление, пропорциональное ускорению автомобиля. Напряжение, снимаемое с кристалла, пропорционально его деформации, и, следовательно, ускорению. В соответствии с давлением массы возможно также изменение сопротивления пьезокристалла.
При использовании датчиков, фиксирующих момент удара, необходимо как можно быстрее наполнить воздухом подушки. Резкое изменение объема мешков приводит к быстрому повышению давления воздуха в салоне с закрытыми окнами, из-за чего могут пострадать барабанные перепонки, глаза, внутренние органы людей.
Для уменьшения давления воздуха в салоне предложено в момент аварии выбивать стекла. Для того чтобы несколько уменьшить скорость нарастания давления, рекомендуется помещать мешок внутрь другого упругого мешка. Упругая оболочка замедляет скорость нарастания давления в мешке и тем самым уменьшается травматизм.
Без описанных устройств вполне можно обойтись, если использовать для управления воздушными мешками ( или активным ремнем безопасности) датчик, прогнозирующий столкновение. Этот датчик подает сигнал на подачу воздуха в мешок раньше, чем контактный. Давление при этом может нарастать относительно медленно и не представлять опасности для людей. На срабатывание всей системы безопасности требуется определенный промежуток времени (25—50 мс). Поэтому при больших скоростях движения система с контактным датчиком, подающим команду на подачу воздуха при ударе, не успевает наполнить воздухом мешки. При использовании же датчиков, прогнозирующих удар на расстоянии 1—2 м, безопасная скорость автомобиля увеличивается до 96 км/ч. Недостатком датчиков удара является также возможное срабатывание при тряске на плохих дорогах.
В качестве датчиков, прогнозирующих столкновение, могут использоваться различные устройства. Но опыт показал,- что емкостные и индуктивные датчики громоздки, плохо защищены от помех, ими часто невозг можно измерить скорость и размеры препятствия. Работоспособность оптических датчиков зависит от дождя, снега, пыли, грязи и т. п.
Наиболее перспективными в системах управления воздушными подушками или активными ремнями безопасности являются радиолокационные и ультразвуковые датчики. Известно, что по ряду параметров они превосходят, а по большинству сравнимы с другими устройствами. Однако радиолокационные- датчики, рассчитанные на обнаружение препятствий на расстоя- ‘ нии до 2 м, сложны, а в показания ультразвуковых датчиков могут вносить неопределенность акустические шумы.
Условия, в которых формируется команда на срабатывание защитной системы, отличаются в различных разработках. В одном из устройств команда подается в случае, если скорость сближения с препятствием на расстоянии от него 0,9 м превышает 27 км/ч.
Специалисты концерна «Ниссан» при выборе условий, в которых подается команда на заполнение воздухом подушек (или затягивание предварительно надетых ремней), руководствовались тем, что невозможно предотвратить столкновение автомобиля, находящегося в двух или менее метрах от препятствия и сближающегося с ним с относительной скоростью, превышающей 32 км/ч. Время обнаружения препятствия должно быть не меньше 20 мс, так как при скорости 160 км/ч автомобиль за 20 мс перемещается почти на 1 м. В качестве наименьшего обнаруживаемого препятствия выбран фонарный столб уличного освещения, так как столкновение с препятствием меньшего размера обычно не сопрб—вождается травмами людей.
Возможны и другие принципы формирования команд на срабатывание защитной системы. В одном из датчиков сигнал на заполнение надувных подушек подается, если расстояние до препятствия (измеряемое по’ задержке излучаемого импульса) оказывается первоначально равным 0,6—1,8 м, а в следующем измерении составляет 0,6—0,9 м при скорости движения автомобиля, превышающей заданное значение.
В некоторых датчиках для увеличения помехозащищенности, помимо указанных величин, проверяется, находится ли встречный объект на курсе следования. Такая проверка необходима в связи с возможностью приема радиосигналов встречных транспортных средств.
Для улучшения помехозащищенности используют иногда комбинацию датчиков. Так, на скоростях до 40 км/ч применяется сигнал только от механического контактного датчика. В диапазоне скоростей 40—80 км/ч рекомендуется принимать в рассмотрение сигналы от контактного и прогнозирующего датчиков. Подача воздуха в подушки должна происходить лишь при наличии двух сигналов. При скоростях, больших 80 км/ч, система работает в•зависимости от показаний только прогнозирующего датчика. Особенностью данного предложения является то, что порог срабатывания прогнозирующего радиолокационного датчика выбирается таким образом, чтобы вероятность правильного срабатывания была максимальной при скоростях выше 80 км/ч. Сопутствующее этому уменьшение надежности работы локатора в диапазоне скоростей 40—80 км/ч компенсируется безотказной работой контактного датчика.
Большое внимание, уделяемое повышению помехозащищенности систем управления пассивными средствами защиты, не случайно. По мнению американских исследователей, вероятность ложного срабатывания системы должна находиться в пределах, ограниченных вероятностью столкновения (один случай в четыре года или около 2000 ч езды) и вероятностью смертельного исхода при аварии (один случай за 10 лет на 250 автомобилей).
Характерной особенностью современных электронных средств управления воздушными подушками является наличие средств самодиагностики. В устройстве концерна «Дженерал моторе» имеется встроенный диагностический блок, который непрерывно контролирует работоспособность основных частей системы. Если обнаруживаются какие-либо отклонения от нормы, из-за которых подушки могут не сработать, включается световой сигнал предупреждения, видимый и пассажиру автомобиля.
Устройства управления надувными подушками содержат в своем составе бортовые регистраторы, записывающие в свою память время обнаружения неисправности и регистрирующие скорость в момент удара. Это необходимо для того, чтобы установить причины ДТП, а в случае отказа системы подачи воздуха в подушки установить своевременность ремонта. Таким образом регистратор является свидетелем, отвечающим на вопрос, может ли быть признан виновным водитель в происшедшем ДТП и его последствиях.
Проверка состояния водителя. Свыше 50% случаев со смертельным исходом в США связано с потреблением алкоголя. Ожидается, что эта цифра будет возрастать в связи с увеличением алкоголя на душу населения. Поэтому ряд фирм работает над созданием электронных устройств «Тестеров трезвости», препятствующих включению двигателя человеком, находящимся в нетрезвом состоянии.
Принцип работы тестеров трезвости, обычно базируется на том, что у человека, принявшего алкоголь, нарушается координация движения, увеличивается время реакции. Рассмотрим два устройства, в рснову работы которых положен данный принцип.
Устройство, разработанное концерном «Дженерал Моторс», представляет собой электронный блок, похожий на микрокалькулятор. На экране в течение 1 с появляется пятизначное случайное число. Водитель должен набрать на клавиатуре в заданное время (около 3 с) такое же число. При трех неудачных попытках двигатель нельзя завести в течение 30 мин. Через это время можно вновь попытаться уехать на автомобиле.
В другой системе той же компании проверка возможности человека управлять автомобилем заключается в том, чтобы, поворачивая рулевое колесо при выключенном двигателе, остановить стрелку прибора, движущуюся по квазислучайному закону. Тест продолжается Ю с. ‘
Системы, основанные на проверке перед поездкой реакции и координации движения водителя, не свободны’ от недостатков. Водитель может попросить кого-либо завести двигатель. Он также может не выключать двигатель, зная о том, что будет принимать спиртные напитки. В тестере необходимо предусмотреть ситуации, в которых включение двигателя не должно блокироваться, например при пуске заглохшего двигателя. Не проверяется состояние человека в процессе поездки.
Значительную сложность при разработке тестеров трезвости представляет широта диапазона рассеяния оценок, характеризующих состояние водителя. Поэтому устройство, работающее со 100%-ной гарантией, пока отсутствует. Однако в результате работ надежность тестеров трезвости постоянно растет. Так, первое устройство концерна «Дженерал Моторс» работало с 50%-ной надежностью, т. е. выявляло 50% людей с концентрацией алкоголя в крови, большей 0,1%. К 1977 г. надежность была доведена до 78%, и исследования в этом направлении продолжаются.
В литературе высказывается мнение о том, что в работе блокирующих зажигание тестеров трезвости не учитывается психология человека. Эти устройства противодействуют водителю, не позволяя ему завести двигатель. Поэтому при обязательной установке на автомобиле тестера могут появиться устройства, дающие возможность начать движение без всяких проверок. Учитывая данное обстоятельство, предлагается не блокировать зажигание. Система должна только регистрировать ошибки водителя и оповещать его о превышении допустимого значения, погрешностей, подавая звуковой и световой сигналы. Водитель, убедившись в том, что он не может работать без ошибок, остановит автомобиль без насильственных действий со стороны автоматики.
Для контроля состояния водителя в процессе управления автомобилем в Японии разработано устройство, измеряющее количество движений рулевого колеса за некоторый промежуток времени.
Если количество движений меньше некоторого значения, зависящего от скорости автомобиля, то раздается сигнал тревоги. Принцип действия данного устройства базируется на результатах исследования, показавшего, что на скорости 14 м/с (50 км/ч) водитель на оживленной улице поворачивает рулевое колесо не реже раза в 2 с. При утомлении водителя частота поворота рулевого колеса уменьшается в 1,7—2 раза.
Значение оценок, характеризующих состояние водителя (например, частота поворота рулевого колеса), отличается для различных водителей и зависит от условий движения. Поэтому в будущем подобные системы должны быть адаптируемыми. В этом случае удастся учесть индивидуальные особенности людей и конкретные условия движения.
Учет индивидуальных особенностей водителя предлагается осуществлять, сравнивая значения его воздействий на органы управления автомобилем с нормативными. В результате обработки результатов сравнения может быть вычислен показатель качества управления автомобилем. Если водитель устал или находится в состоянии опьянения, то значение показателя качества будет низким, и устройство выключит двигатель или проинформирует водителя о низком качестве управления автомобилем.
Рекламные предложения:
Главная → Справочник → Статьи → Форум
Механизация земляных работ
Механизация строительства
Механизация дорожных работ
Автоматизация строительства
→ Бетонные работы
→ Мини-тракторы
 Разделы
Разделы
Строительные машины и оборудование
→ Для специальных земляных работ
→ Дорожно-строительные машины
→ Строительное оборудование
→ Асфальтоукладчики и катки
→ Большегрузные машины
→ Строительные машины, часть 2,
→ Дорожные машины, часть 2
→ Ремонтные машины
→ Ковшовые машины
→ Автогрейдеры
→ Экскаваторы
→ Бульдозеры
→ Скреперы
→ Грейдеры
Эксплуатация строительных машин
→ Эксплуатация средств механизации
→ Эксплуатация погрузочных машин
→ Эксплуатация паровых машин
→ Эксплуатация экскаваторов
→ Эксплуатация подъемников
→ Эксплуатация кранов перегружателей
→ Эксплуатация кузовов машин
→ Крановщикам и стропальщикам
Ремонт строительных машин
Ремонт дорожных машин
Ремонт лесозаготовительных машин
Ремонт автомобилей КАмаЗ
Техническое обслуживание автомобилей
Очистка автомобилей при ремонте
Материалы и шины
Остались вопросы по теме:
"Повышение безопасности движения"
— воспользуйтесь поиском.
→ Машины городского хозяйства
→ Естественная история машин
→ Транспортная психология
→ Пожарные автомобили
→ Автомобили-рефрижераторы
→ Монтаж и эксплуатация лифтов
→ Тракторы