Строй-Техника.ру
Строительные машины и оборудование, справочник
При проектировании машин приходится определять необходимое тяговое усилие или усилие, развиваемое основным двигателем машины, если он приводит ходовой механизм, либо выбрать двигатель, если он специально предназначен для привода ходового механизма. В обоих случаях следует сначала определить необходимые для машины тяговые усилия при движении -по хорошей дороге, при движении в тяжелых условиях и при предельном подъеме, а зная их, в первом случае определить возможные для данного двигателя скорости передвижения в указанных условиях. Во втором случае по полученным тяговым усилиям и желательным для данной машины скоростям движения выбирают необходимую мощность и параметры ходового двигателя или двигателей (при раздельном приводе движителей).
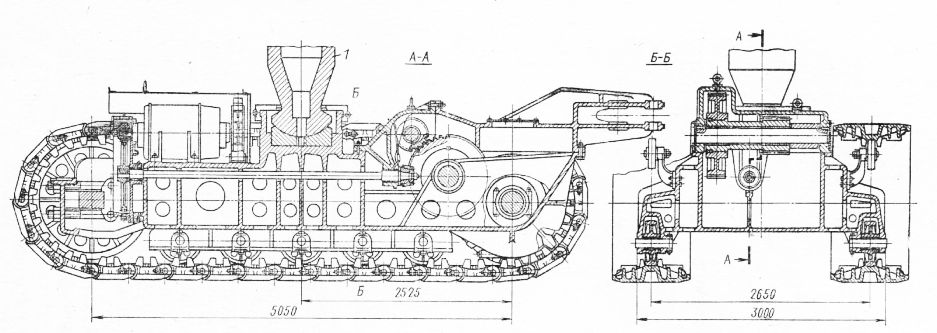
Рис. 1. Двухгусеничный движитель васьмигусеничной машины
Рекламные предложения на основе ваших интересов:
Дополнительные материалы по теме:
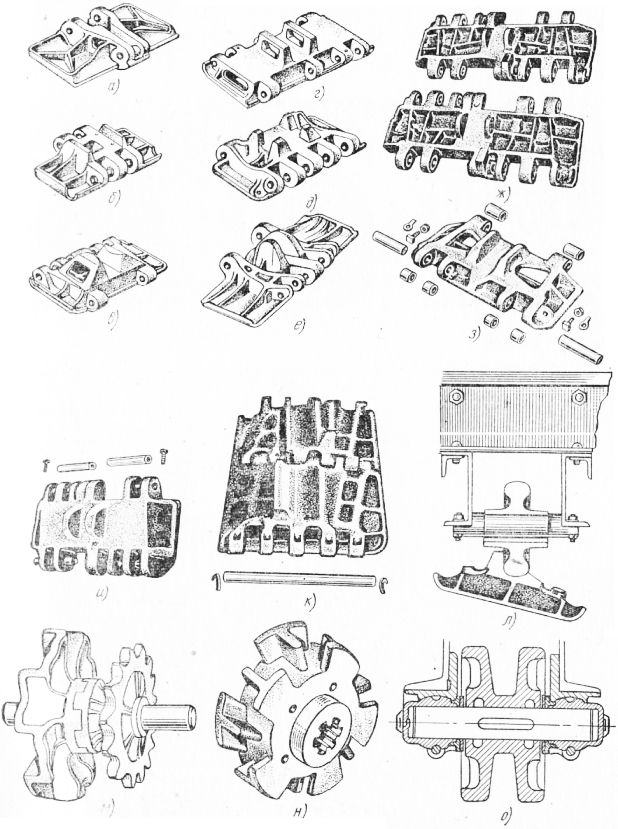
Рис. 2. Конструкции гусеничных звеньев, ведущих звездочек и опорных катков:
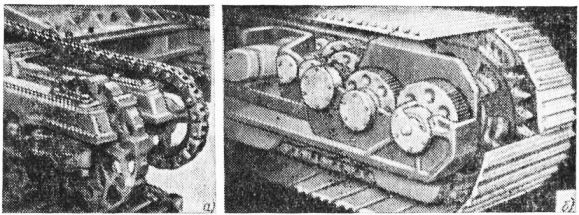
Рис. 3. Типовые ведущие колеса:
а – для двухгребневого зацепления; б – для пальцевого зацепления (колесо-звездочка)
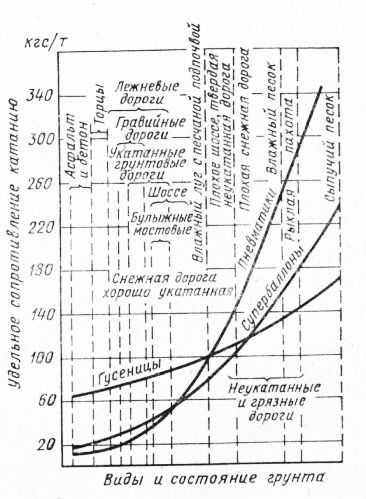
Рис. 4. Сопротивление качению колесных и гусеничных машин
При расчете тяговых усилий следует различать силу тяги, развиваемую двигателем, и силу тяги по сцеплению с грунтом, которая учитывает фактическое тяговое усилие, исходя из состояния грунта (дороги) — влажности, коэффициента трения, величины шпор гусениц, лыж или грунтозацепов шин, а также исходя из скорости с учетом буксования (особенно при тяговом расчете колесных машин). Кроме того, при буксовании приходится учитывать дополнительную просадку машин помимо статической просадки от веса, при которой также необходимо принимать во внимание конструкцию опорной части ходового движителя.
Одновременное действие всех указанных сопротивлений не следует принимать в расчет, так как поворот с одновременным подъемом при предельных значениях последнего делать нецелесообразно. Поэтому при расчете принимается большее из значений максимального сопротивления подъема при движении по прямой или максимального сопротивления повороту при движении по горизонтали.
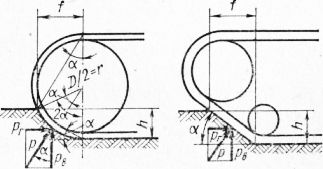
Рис. 5. Схема смятия грунта при качении гусеницы
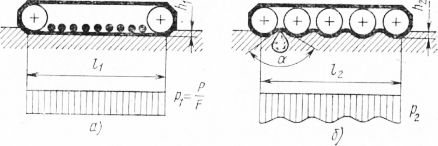
Рис. 6. Статические эпюры давлений под катками многоопорной (а) и малоопорной (б) гусениц
Рис. 7. Схема к определению Л4тр
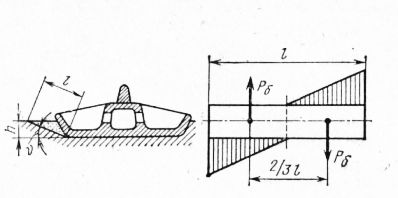
Рис. 8. Схема к определению момента скалывания грунта при повороте гусеницы
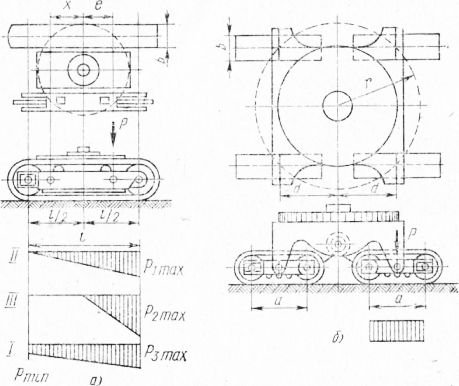
Рис. 9. Схемы к определению давления на грунт двухгусеничной (а) и многогусеничной (б) машин
Шагающее ходовое оборудование применяется для машин, имеющих вращающуюся платформу (экскаваторы и краны); в последнее время находит применение и для других машин.
Его достоинства заключаются: а) в меньшем давлении на грунт, которое для средних значений ниже, чем у гусеничного хода в 2— 2,5 раза, а для наибольших значений меньше в 8—10 раз; б) в маневренности, так как разворот машины заменен поворотом вращающейся платформы на нижней раме, поскольку лыжи шагающего хода и ходовой механизм расположены на вращающейся платформе.
Нижняя рама или база представляет собой коробчатую круглую пластину высотой от 0,3 до 2,0 м с основными балками, расположенными радиально и связанными концентрически установленными распорками, или с балками, расположенными крест-накрест. Диаметр базы обеспечивает среднее давление на грунт при работе от 0,3 до 1,5 кгс/см2.
Верхний лист может быть тоньше нижнего в 2 раза, а вертикальные-— примерно в 1,3 раза. Наиболее целесообразно рельс опорного круга располагать возможно ближе к краю базы.
Ходовые механизмы состоят из лыж, механизма, приводящего их в действие, и привода.
Размер шага колеблется от 1,0 до 2,3 м при механических и от 0,6 до 1 м при гидравлических системах. Соответственно продолжительность шага меняется от 21 до 30 с и от 40 с до 1 мин.
Мощность привода хода обычно позволяет реализовать скорость хода от 0,25 до 0,3 км/ч (больше — для менее тяжелых машин) и легко преодолевать подъемы от 7 до 15° (большие значения — для машин меньшей мощности).
Трансмиссия привода ходового механизма обычно трех- пятиступенчатая с передаточным числом от 170 до 700.
Все механические системы дают постоянную траекторию всех точек экскаватора при каждом шаге. Гидравлическрш ход позволяет в известных пределах менять высоту подъема и даже передвигаться, почти не поднимая базы от земли.
Наиболее просто определение реакций в элементах шагающего хода любой конструкции производится графически. Для положения, в котором база приподнята одним краем, на машину действуют три силы: сила тяжести G, реакция А грунта на край базы и реакция В рамы и башмаков на эксцентрик. Направление силы А, которое известно, если задаться коэффициентом трения Ц2, проводится до пересечения с направлением силы G в точке К. Из точки касания ролика кривошипа с рамой проводится известное нам направление реакции рамы R, а из точки касания эксцентрика с башмаком — направление силы D.
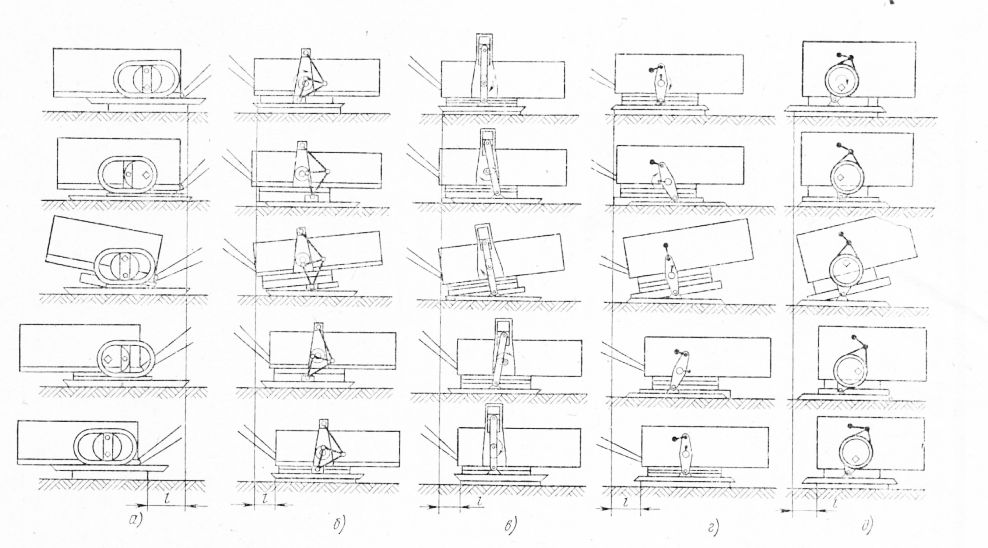
Рис. 10. Схемы шагающего хода с постоянной траекторией:
а — кривошипно-эксцентриковый; б — г — кривошипно-шарнирные; б — с треугольной рамой; в — крейцкопфный; г — с серьгой (НКМЗ); д — кривошипно-эксцентриковый с серьгой
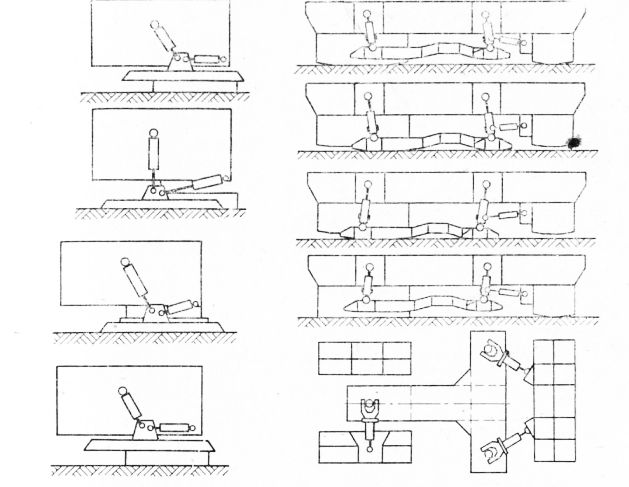
Puc. 11. Схемы шагающих гидравлических механизмов с регулируемыми траекторией и шагом

Рис. 12. Графическое определение
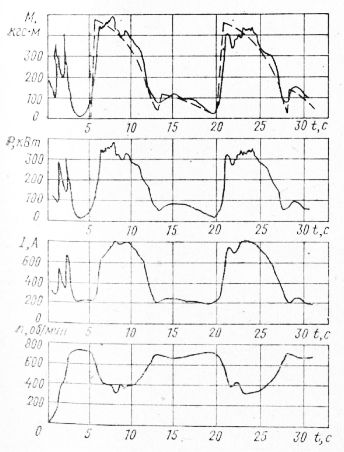
Рис. 13. Диаграммы М, Р, I и п при шагании машины массой 180 т
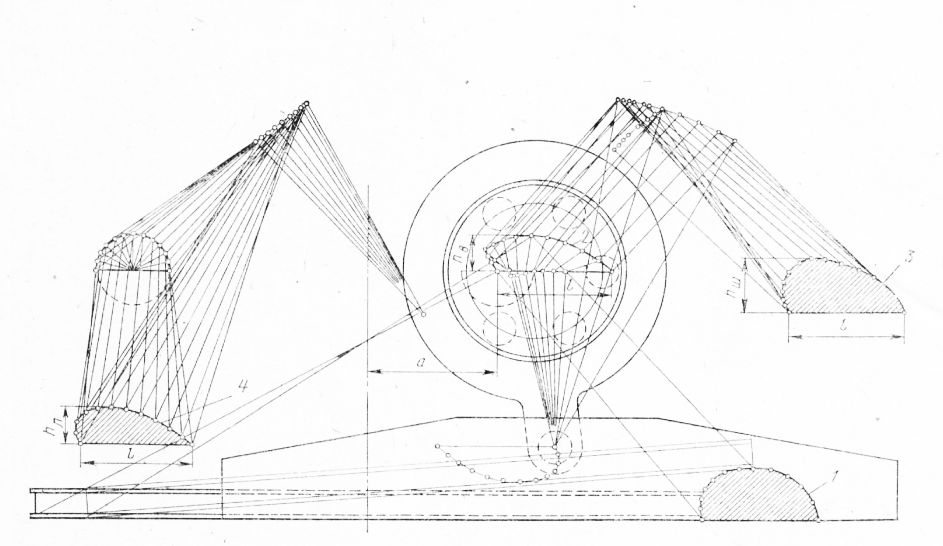
Рис. 14. Кинематика кривошипно-шарнирного механизма с серьгой (W = 600 Рансом):
1 —траектория края ходовой рамы; 2 — траектория оси кривошипного вала; 3 — траектория нижнего шарнира серьги; 4— траектория шарнира подвески лыжи
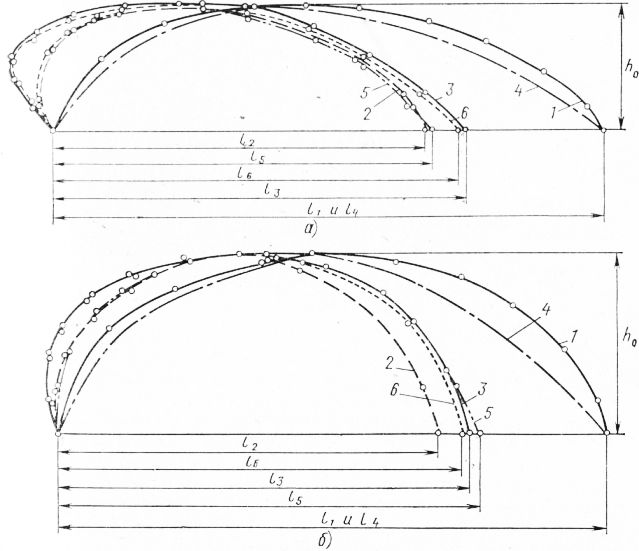
Рис. 15. Сопоставление траекторий ходового вала (а) и края нижней рамы (б) при различных механизмах шагания:
1 — кривошипно-эксцентриковом; 2 — кривошипно-крейцкопфном; 3 – с треугольной рамой; 4 — с серьгой; 5—с верхней, серьгой; 6 — с задней серьгой
этом повышение необходимого момента на валу и увеличивая крутизну траектории в конце шага. Уменьшение ср увеличивает смещение базы назад в начале шага. Наиболее выгодные параметры получаются при ф«10-М2° и длине нижнего плеча опорной стойки, равной 5—5,5 длины кривошипа. Хотя в этих условиях для одинакового размера шага с кривошипно-эксцентрико-вым механизмом длину кривошипа выбирают несколько больше, все же необходимый момент и мощность на валу получаются на 12—15% меньше за счет устранения трения эксцентрика о раму. К. п. д. юривошипно-шарнирных механизмов колеблется от 0,84 До 0,87 у крейцкопфа за счет уменьшения шарниров.
У кривошипно-шарнирного механизма с треугольной рамой фирмы Марион в момент начала шага наклон передней стороны рамы не более 5—7°. Длина опорной стороны Рамы выбирается как нижнее плечо опорной стойки кривошипно-крейцкопфного механизма, исходя из целесообразной для конструкции высоты главного вала над землей. Верхний шарнир тяги в моменты начала и конца шага должен быть расположен на продолжении опорной стороны. При этом расстояние от пальца кривошипа до верхнего шарнира должно быть на 20— 30% длиннее опорной стороны рамы. Верхняя ее сторона равна опорной.
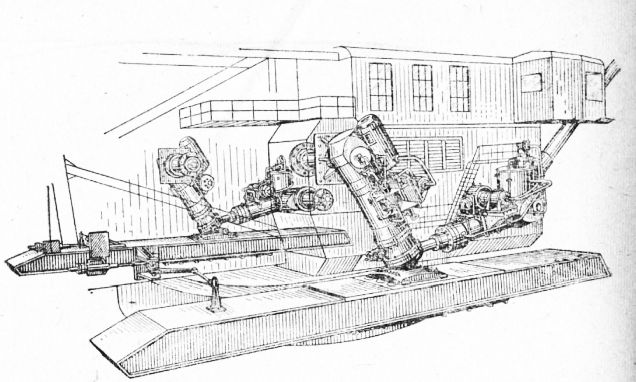
Рис. 16. Новый гидравлический шагающий механизм УЗТМ
Шарнир но-эксцентриковые механизмы при наибольшей сложности конструкции отличаются высокой надежностью. Принципиально они не отличаются от кривошипно-шарнирных механизмов с серьгой. Формулы расчета кривошипно-шарнирных механизмов пригодны и для шарнирно-эксцентриковых.
Кривошипно-эксцентриковый механизм с серьгой отличается наиболее простой, надежной и компактной конструкцией, что позволяет избежать установки высоких мощных колонн, необходимых во- всех кривошипно-шарнирных механизмах.
Вариант с креплением серьги внизу в платформе (Рансом 1400) позволяет, как и в случае кривошипно-эксцентриков’ого механизма, отказаться от стоек для крепления верхних шарниров.
На рис. 15 дано сопоставление траекторий главного ходового вала (а) и края нижней рамы (б) при различных механизмах.
На рис. 16 показан новый гидравлический шагающий механизм УЗТМ, отличающийся почти горизонтальным расположением тягового цилиндра, что более выгодно, чем прежнее, сильно наклонное его положение.
Рекламные предложения:
Главная → Справочник → Статьи → Форум
Механизация земляных работ
Механизация строительства
Механизация дорожных работ
Автоматизация строительства
→ Бетонные работы
→ Мини-тракторы
 Разделы
Разделы
Строительные машины и оборудование
→ Для специальных земляных работ
→ Дорожно-строительные машины
→ Строительное оборудование
→ Асфальтоукладчики и катки
→ Большегрузные машины
→ Строительные машины, часть 2,
→ Дорожные машины, часть 2
→ Ремонтные машины
→ Ковшовые машины
→ Автогрейдеры
→ Экскаваторы
→ Бульдозеры
→ Скреперы
→ Грейдеры
Эксплуатация строительных машин
→ Эксплуатация средств механизации
→ Эксплуатация погрузочных машин
→ Эксплуатация паровых машин
→ Эксплуатация экскаваторов
→ Эксплуатация подъемников
→ Эксплуатация кранов перегружателей
→ Эксплуатация кузовов машин
→ Крановщикам и стропальщикам
Ремонт строительных машин
Ремонт дорожных машин
Ремонт лесозаготовительных машин
Ремонт автомобилей КАмаЗ
Техническое обслуживание автомобилей
Очистка автомобилей при ремонте
Материалы и шины
Остались вопросы по теме:
"Тяговые расчеты и давление на грунт"
— воспользуйтесь поиском.
→ Машины городского хозяйства
→ Естественная история машин
→ Транспортная психология
→ Пожарные автомобили
→ Автомобили-рефрижераторы
→ Монтаж и эксплуатация лифтов
→ Тракторы