Строй-Техника.ру
Строительные машины и оборудование, справочник
Аппарат задания и контроля хода АЗК-1 шахтной подъемной машины предназначен для управления шахтной одно- и двухбарабанной и многоканатной подъемной машиной и контроля ее работы.
Аппарат АЗК-1 выполняет следующие функции: выдает импульсы в отдельных точках пути движения подъемного сосуда для осуществления необходимых переключений в схеме автоматического управления;
— преобразовывает угловое перемещение вала барабана подъемной машины для измерения электрическими указателями глубины пути, пройденного подъемным сосудом;
— задает программу изменения скорости хода подъемной машины на максимальной и сниженной скоростях;
— осуществляет контроль фактической скорости в период разгона, равномерного хода и замедления;
— производит корректировку элементов аппарата в соответствии с положением подъемных сосудов в стволе шахты при проскальзывании или переползании канатов относительно канатоведущего шкива многоканатных подъемных машин или при перестановке барабанов двухбарабанных подъемных машин, а также производит компенсацию ошибки при вытяжке каната или износе футеровки; осуществляет защиту от переподъема;
— осуществляет контроль целостности кинематических цепей, передающих вращение от подъемной машины, и своих собственных.
Конструктивной особенностью аппарата АЗК-1 является симметричная схема приводного редуктора с независимой синхронизацией одной части относительно другой, что позволяет применять аппарат для разных типов подъемных машин.
Рекламные предложения на основе ваших интересов:
Дополнительные материалы по теме:
В схемах управления двухбарабанными подъемными установками при перестановке барабанов одна часть аппарата остается соединенной с подъемной машиной, а другая в процессе перестановки синхронизируется со «своим» сосудом в стволе шахты.
При вытяжке каната и износе футеровки барабана синхронизация обеих частей аппарата производится отдельно.
При управлении многоканатными подъемными установками обе части аппарата будут синхронизироваться раздельно, в соответствии с положением сосуда в стволе шахты. Синхронизация элементов аппарата в соответствии с положением подъемного сосуда в стволе возможна как автоматически, так и дистанционно (при ручном управлении).
Основными узлами аппарата АЗК-1 являются:
1) шкаф с приводом типа ШПА-1, содержащий: привод аппарата, корректирующее устройство (2 шт.), блок сельсин-датчиков (2 шт.) и блок этажных выключателей (2 шт.);
2) блок программирования при разъездах на максимальной скорости типа БПМ-1, содержащий редуктор с электромагнитной муфтой и программное устройство;
3) блок программирования при разъездах на пониженной скорости типа БПП-1, содержащий редуктор с электромагнитной муфтой и программное устройство;
4) два реле контроля вращения типа РКВ-1;
5) электрический ограничитель скорости типа ЭОС-2.
Аппарат АЗК-1 имеет три шкафа:
1) шкаф с приводом типа ШПА-1;
2) блок программирования при разъездах на максимальной скорости типа БПМ-1;
3) блок программирования при разъездах на пониженной скорости типа БПП-1.
Шкаф привода с блоками программных устройств соединяется с помощью пальцевых муфт.
Наилучшими условиями эксплуатации аппарата АЗК-1 является непосредственное присоединение (напрямую) к коренному валу машины со стороны редуктора или барабана. Для соединения применяют две шарнирные муфты и вал, длина которого определяется условиями привязки аппарата.
Предусмотрен также вариант установки аппарата АЗК-1 с одним программным блоком БПМ-1.
Привод аппарата состоит из одноступенчатого промежуточного Редуктора, двух дифференциалов, двух червячных и зубчатых передач к валам блоков этажных выключателей.
Все элементы привода расположены в чугунном литом корпусе с вставкой и картером.
Вращение от вала подъемной машины передается через промежуточный редуктор к дифференциалам, затем к валам рычажной системы этажных выключателей. С помощью сменных шестерен возможно изменение скорости вращения валов программных устройств.
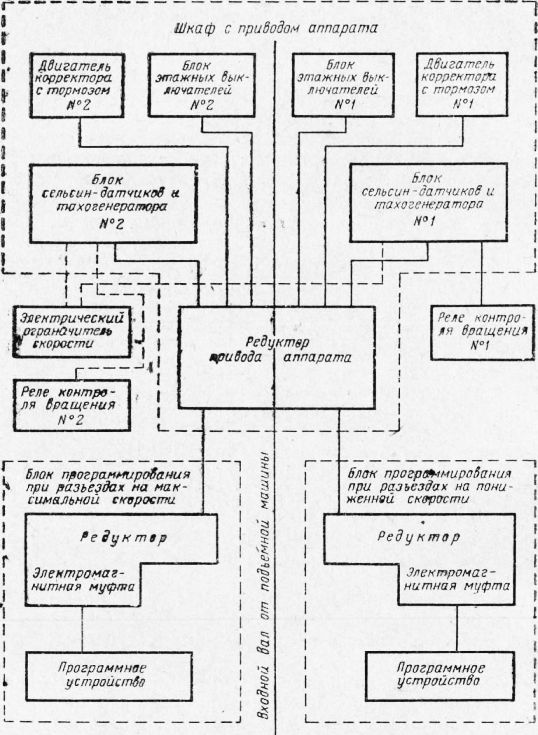
Рис. 1. Структурная схема аппарата АЗК-1
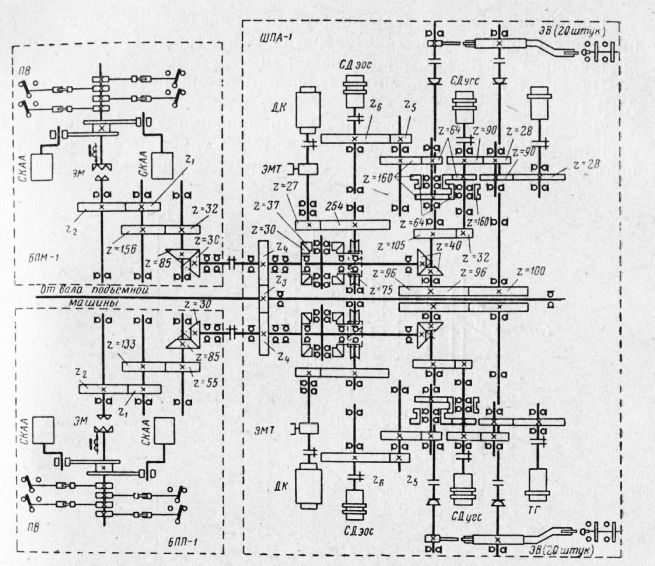
Рис. 2. Кинематическая схема аппарата АЗК-1
Вращение к блокам сельсин-датчиков указателей глубины, ограничителя скорости и к тахогенераторам контроля вращения передается через соответствующие шестерни.
На рис. 3 показана кинематическая схема редуктора привода АЗК-1.
Для приведения в соответствие положения механизмов управления АЗК-1 и электрических указателей глубины с положением подъемных сосудов в стволе в шкафу привода аппарата применены
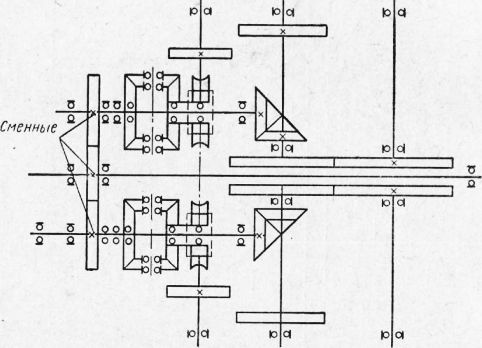
Рис. 3. Кинематическая схема редуктора привода аппарата АЗК-1
два корректора. Коррекция элементов аппарата должна производиться в период нахождения подъемного сосуда на верхней приемной площадке.
Корректор состоит из асинхронного электродвигателя с электромагнитным тормозом, зубчатой передачи, червячной передачи и дифференциала.
Трехфазный электродвигатель AOJI21-4 имеет мощность Р = 0,27 Вт; скорость вращения вала ротора п = 1500 об/мин, напряжение U = 220/380 В. Исполнение электродвигателя ФЗ.
Для устранения влияния выбега ротора двигателя применен электромагнитный тормоз с катушкой 1 на 220 В постоянного тока.
Электрическая схема включения электромагнитного тормоза корректора показана на рис. 87.
С подачей напряжения на двигатель одновременно должно подаваться напряжение и на катушку 4 электромагнита через балластное сопротивление R6 типа ПЭВ-75 на 200 Ом и выпрямительный мост из диодов Д205, диск притягивается, и происходит растормаживание двигателя. Катушка рассчитана на кратковременный режим работы с ПВ-65%.
В аппаратах АЗК-1, выпускаемых с 1969 г., применена измененная схема включения тормозных муфт корректирующих устройств. В схеме предусмотрена защита электродвигателей корректирующих устройств в случае преждевременного выхода из строя диодов выпрямительного моста Д, питающего электромагниты тормозных муфт.
Мост Д питается от источника переменного тока напряжением 127 В. При выходе из строя одного из диодов моста реле РМ отключается и отключает цепь катушек пускателей П1 и П2. Для увеличения коэффициента возврата и защиты реле РМ от перенапряжения последовательно в цепь катушки последнего включено сопротивление R6 на 330 Ом.
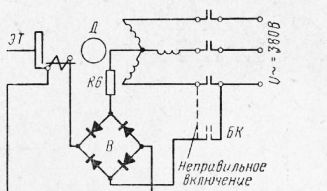
Рис. 4. Схема включения электромагнитного тормоза
Для снятия импульса обратного напряжения, возникающего на обмотках электромагнитов тормозных муфт (M1 и М2) в момент разрыва цепи питания, катушки муфт (Ml и М2) зашунтированы диодами.
Блок электрических датчиков имеет два сельсин-датчика типа БД-501Аи тахогенератор ТГ-2С, установленные в литом алюминиевом корпусе. К корпусу сельсины и тахогенератор крепят болтом и гайкой. Корпус соединен с основанием восемью болтами. В основании установлен направляющий стакан для обеспечения зацепления шестерни с колесом.
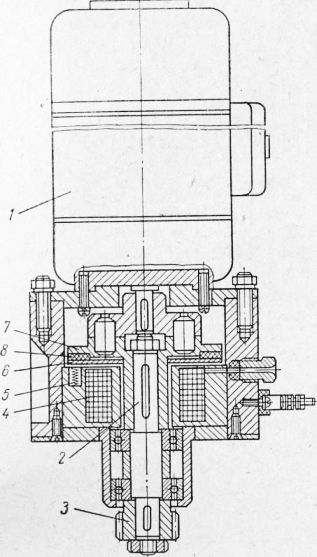
Рис. 5. Электромагнитный тормоз:
1 — двигатель; 2 — вал; 3 — шестерня; 4 — катушка электромагнита; 5 — пружины; 6 — диск; 7 — полумуфта; 8 — тормозное кольцо
Первый датчик, получающий до 98,5 оборота за подъем, предназначен для выдачи сигнала сельсин-приемнику указателя глубины УГС-4.
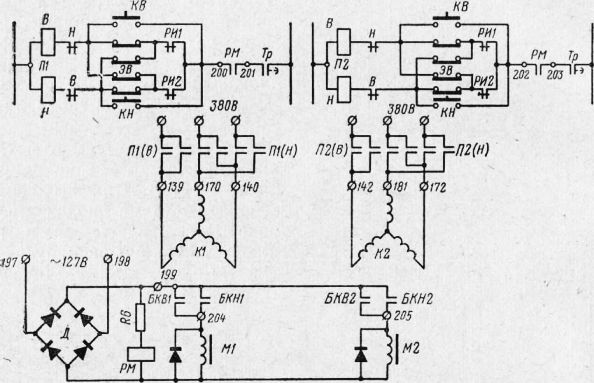
Рис. 6. Измененная схема включения тормозных муфт корректирующих устройств
Вал второго датчика за путь замедления подъемной машины должен повернуться на 60—70°.
Для замены шестерен достаточно отсоединить крышки с сельсином от корпуса. Сельсин-датчик служит датчиком пути электрического ограничителя скорости ЭОС-2.
Тахогенератор ТГ-2С за подъемную операцию получает до 1017 оборотов и служит для выдачи сигналов на реле контроля целостности кинематической цепи аппарата.
Этажные выключатели предназначены для выдачи импульсов в зависимости от положения сосудов. Система этажных выключателей состоит из выключателей, шарнирных рычагов и рычагов-толкателей. Предусмотрено 40 этажных выключателей, по 20 в каждом блоке. 10 выключателей срабатывают при правом вращении входного вала аппарата и 10 — при левом.
После срабатывания этажный выключатель остается во включенном положении, входной вал АЗК-1 продолжает вращаться в том же направлении или останавливается. В исходное положение этажный выключатель устанавливается при обратном направлении вращения входного вала АЗК-1.
Каждый этажный выключатель имеет один замыкающий и один размыкающий контакты. Разрывная мощность контактов в цепях постоянного тока напряжением до 220 В с индуктивной нагрузкой до 2 Гн не более 50 Вт и не более 500 ВА. Длительно допустимый ток через контакты 5 А.
Для настройки на срабатывание этажного выключателя необходимо:
— установить груженый подъемный сосуд (скип, клеть) в положение, при котором должен сработать настраиваемый этажный выключатель;
— ослабить фиксирующие болты пружинного толкателя и кулака, относящиеся к настраиваемому выключателю (эти операции выполняют с помощью торцового ключа);
— повернуть на своих валах пружинный толкатель и кулак таким образом, чтобы кулак сдвинул толкатель до положения, при котором коромысло переключит путевой выключатель;
— затянуть торцовым ключом фиксирующие болты пружинного толкателя и кулака.
После этого можно переходить к настройке следующего этажного выключателя, начав ее с установки груженого сосуда в очередное положение, фиксируемое схемой управления.
Блок программирования БПМ-1 осуществляет регулирование разгона и замедления подъемной машины на максимальной скорости. Механически, с помощью пальцевой муфты, блок соединяется с шкафом привода аппарата. БПМ-1 представляет собой шкаф со специальным основанием, на котором смонтированы: редуктор с командоаппа-ратами, реле и программными дисками; микровыключателп и клеммный набор.
Редуктор блока БПМ-1 передает вращение от привода аппарата к профильным дискам программного устройства. Все элементы редуктора расположены в чугунном литом корпусе 1 с крышкой 2.
Передача вращения к электромагнитной зубчатой муфте 3 производится шестернями zlf za, z3, z4, z6 и ze. Шестерни z5 и z6 являются сменными, они применяются для получения на валу 4 от 0,89 до 21,1 оборота за подъем, что соответствует отношению максимальной высоты подъема Н к пути разгона и замедления.
Программное устройство состоит из двух программных дисков, сидящих на общем валу, двух командоаппаратов СКАА-111, четырех конечных микровыключателей и зубчатой электромагнитной муфты. Один профильный диск со своим командоаппаратом предназначен для разгона и замедления вниз, а второй профильный диск со вторым профильным командоаппаратом — для задания программы разгона и замедления вверх.
Программа разгона подъемной машины задается одной частью оборота программного диска, программа замедления — второй частью оборота.
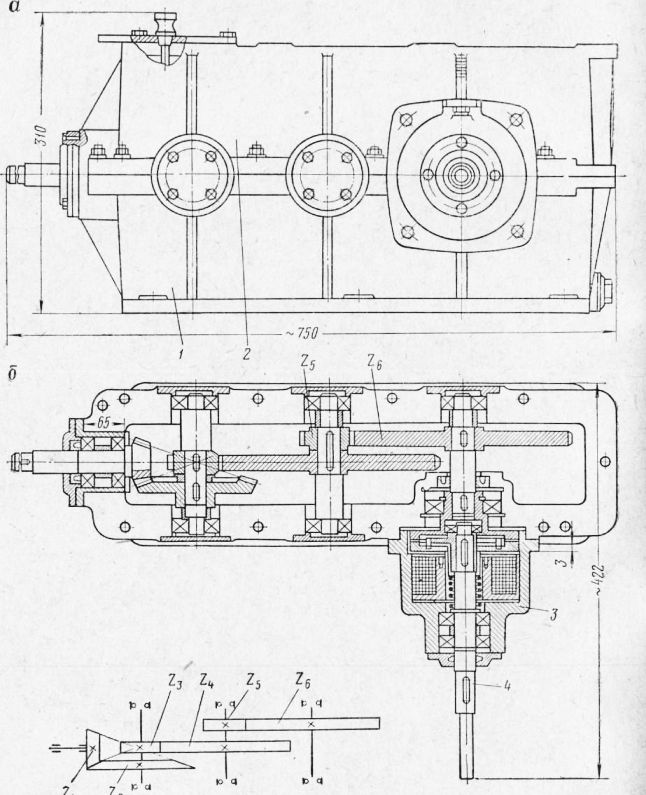
Рис. 7. Редуктор блока БПМ-1:
а — общий вид; б — кинематическая схема
В зависимости от направления движения подъемного сосуда включается тот или другой командоаппарат соответствующего программного устройства. Включается программное устройство зубчатой электромагнитной муфтой от импульса этажного выключателя через промежуточное реле или контактор или от импульса датчика, установленного в стволе. Отключается программное устройство, а значит и разъединяется муфта, от импульса конечного микровыключателя программного устройства через промежуточное реле или контактор.
При включении катушки под напряжение муфта расцепляется с редуктором и затормаживает профилированные диски. При этом последовательно с катушкой контактами реле времени РЭВ-817 включается балластное сопротивление на 1 кОм.
Реле времени срабатывает от того же промежуточного реле или контактора.
Рычаги, воздействующие на конечные микровыключатели, насажены на вал вместе с программными дисками. Микровыключатель с роликом обеспечивает надежную работу при перемещении ролика не более 2 мм.
В качестве программных аппаратов в аппарате АЗК-1 применены сельсинные командоаппараты СКАА-111» Сельсинный командоаппарат автоматического управления СКАА-111 является путевым датчиком напряжения, в котором в качестве потенциал-регулятора использован сельсин БД-501А.
Однофазная обмотка сельсина включается в сеть переменного тока напряжением 110 В. Напряжение, индуктируемое в обмотке синхронизации, выпрямляется встроенным в командоаппарат выпрямительным мостом. Выпрямленное напряжение зависит от угла поворота ротора относительно статора.
Аппарат с программным диском рычагом связан с консольным роликом, собранным на шарикоподшипниках, диаметр ролика 40 мм, ширина 30 мм.
Величина управляющего сигнала изменяется при вращении ротора сельсина БД-501А, которое осуществляется за счет отклонения рычага с роликом от нулевого положения программным диском. За нулевое положение рычага с роликом принято такое, при котором рычаг с роликом отклонен от упора на угол 12°. Полный угол поворота рычага составляет 40°.
Направление вращения рычага изменяется перестановкой поводка. Поворот ротора сельсина осуществляется через ускоряющую зубчатую передачу. При этом если рычаг отклонится на 40°, то ротор сельсина повернется на 80°.
Перед включением командоаппарата в работу необходимо выставить электрический нуль, для чего следует:
установить рычаг в условное нулевое положение, за которое принимают такое, при котором рычаг повернут на 12° от упора. Если при касании ролика рычага на участке минимального радиуса программного диска этот угол не равен 12°, нужно освободить гайки и соответственно повернуть рычаг, после чего гайки вновь туго затянуть;
проверить напряжение на выходе командоаппарата при подаче питания 410 В переменного тока на входе.
Напряжение на выходе измеряют вольтметром постоянного тока с пределом измерения не более 5 В. Если в нулевом положении напряжение на выходе превышает 0,5 В, то поворотом статора сельсина добиваются нулевого показания вольтметра.
Для поворота статора надо отпустить планки, которые крепят сельсин, и затем снова закрепить их.
Блок программирования БПП-1 осуществляет регулирование разгона и замедления подъемной машины на пониженной скорости.
По конструкции блок БПП-1 аналогичен блоку БПМ-1.
Редуктор благодаря сменным шестерням обеспечивает вращение профильных дисков 1,85—42,5 оборота за подъем.
Реле контроля вращения РКБ-1
Для контроля целостности кинематической цепи от вала подъемной машины к валу редуктора программного устройства на валу последнего устанавливают тахогенераторный датчик с выходом на переменном или постоянном токе, а в комплекте с аппаратом АЗК — реле контроля вращения РКВ-1. Принципиальная схема реле контроля вращения показана на рис. 90. Здесь ТГ-1 — тахогенераторный датчик, связанный с редуктором программного устройства АЗД, ТГ-2 — тахогенератор, кинематически связанный с валом подъемного двигателя. При неподвижной машине сигналы, снимаемые с тахо-генераторов ТГ-1 и ТГ-2, равны пулю. При этом транзисторы Т1 и ТЗ закрыты; транзисторы Т2 и Т4 открыты токами, текущими по сопротивлениям. Реле Р1 и Р2 втянуты и своими замыкающими контактами замыкают цепь реле РЗ, контакты которого введены в цепь защиты подъемной установки. При разгоне подъемной машины до скорости 0,7—0,8 м/с открывается транзистор Т1. При этом обмотка реле Р1 обесточивается, так как транзистор Т2 закрывается. При отпадании якоря Р1 его контактами размыкается цепь сопротивления ПЗ, благодаря чему открывается транзистор ТЗ и закрывается транзистор Т4, реле Р2 обесточивается. Отключение реле Р2 происходит практически одновременно с отключением реле Р1, благодаря чему реле РЗ остается втянутым, питаясь через размыкающие контакты реле Р1 и Р2. При максимальной скорости машины реле Р1 и Р2 остаются обесточенными.
При замедлении подъемной машины реле Р1 втянется при скорости 0,7—0,8 м/с, при этом подключается сопротивление ПЗ, транзистор ТЗ закрывается, открывается транзистор Т4 и втягивается реле Р2.
Реле РКВ-1 срабатывает и вызывает предохранительное торможение при следующих возможных неисправностях.
Поломка в кинематической цепи АЗК или обрыв в цепи тахо-генератора ТГ-1 (в обоих случаях исчезает сигнал на базе транзистора Т1). Если при этом подъемная машина двигалась с большой скоростью (реле Р1 и Р2 отключены), произойдет запирание транзистора Т1 и включение реле Р1-, реле Р2 останется обесточенным, так как сигнал тахогенератора ТГ-2 продолжает открывать транзистор ТЗ. Реле РЗ обесточится замыкающим контактом Р1. Если при аварии скорость машины была менее 1,5 м/е, реле Р2 будет включено и цепь реле РЗ замкнута. Однако при возрастании скорости до 1,5 м/с
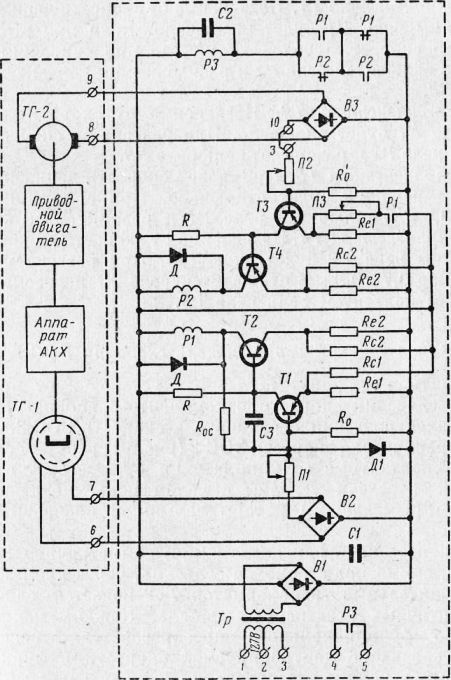
Рис. 8. Принципиальная схема реле контроля вращения РКВ-1
Обрыв цепи тахогенератора ТГ-2. Если при этом скорость машины была выше 1,5 м/с (реле Р1 и Р2 обесточены), исчезает сигнал на базе транзистора ТЗ, что приведет к включению реле Р2, которое своим размыкающим контактом разомкнет цепь реле РЗ. Если при обрыве цепи ТГ-2 машина была неподвижна или двигалась со скоростью менее 0,7—0,8 м/с, реле Р1 и Р2 будут включены. Однако при достижении скорости 0,7—0,8 м/с отключится реле Р1, а реле Р2 останется включенным. Замыкающими контактами Р1 отключится реле РЗ.
Обрыв в цепи питания. При этом отключится реле РЗ.
Пробой транзистора Т1. Независимо от скорости движения подъемной машины реле Р1 будет отключено. Если при этом машина двигалась со скоростью более 1,5 м/с, то при снижении скорости ниже 0,4 м/с включится реле Р2 и размыкающим контактом разорвет цепь реле РЗ.
Пробой транзистора Т2. Независимо от скорости подъемной машины реле Р1 будет включено. При разгоне до скорости 1,5 м/с отключится реле Р2 и разомкнет цепь реле РЗ.
Пробой транзистора ТЗ. При любой скорости движения подъемной машины реле Р2 будет отключено. При снижении скорости ниже 0,7—0,8 м/с включится реле Р1 и разомкнет цепь реле РЗ.
Пробой транзистора Т4. Независимо от скорости движения подъемной машины реле Р2 будет включено. При разгоне машины до скорости выше 0,7—0,8 м/с отключится реле Р1 и разомкнет своим размыкающим контактом цепь реле РЗ.
Электрический ограничитель скорости ЭОС-2
Для защиты рудничных подъемных установок от превышения допустимых значений скорости в комплекте с аппаратурой АЗК-1 применяют электрический ограничитель скорости ЭОС-2.
Схема ограничителя скорости ЭОС-2 работает следующим образом. Бесконтактные сельсин-датчики СД1 и СД2 с помощью понижающей передачи связаны с валом подъемной машины. За путь разгона (замедления) роторы сельсинов поворачиваются на 60-70°.
В период разгона и замедления (при симметричной диаграмме) напряжение, снимаемое с обмотки сельсина, через клеммы и разделительный трансформатор Тр2 подается одновременно на два идентичных независимых канала. Каждый канал состоит из диодного функционального преобразователя, позволяющего осуществлять задание контролируемой скорости в функции пути по^ требуемому закону, узла сравнения действительной и заданной скоростей (нуль-орган) и исполнительного устройства.
Напряжения, снимаемые с диодных функциональных преобразователей ДФП, подаются на входы нуль-органов Т1 и Т2. Последовательно с выходными напряжениями ДФП к нуль-органам подключается выход согласующего элемента, который задает напряжение, пропорциональное максимальной контролируемой скорости.
Таким образом, заданная скорость пропорциональна сумме напряжений от ДФП и согласующего элемента. На вторые входы нуль-органов через делитель подается от тахогенераторов (клеммы 11, 12 и 13, 14) напряжение, пропорциональное действительной скорости. При превышении действительной скорости над заданной в нуль-органах происходит срыв колебаний блокинг-генераторов, вследствие чего исчезает сигнал на входе исполнительных устройств Б01, Б02 и выходные реле отпадают.
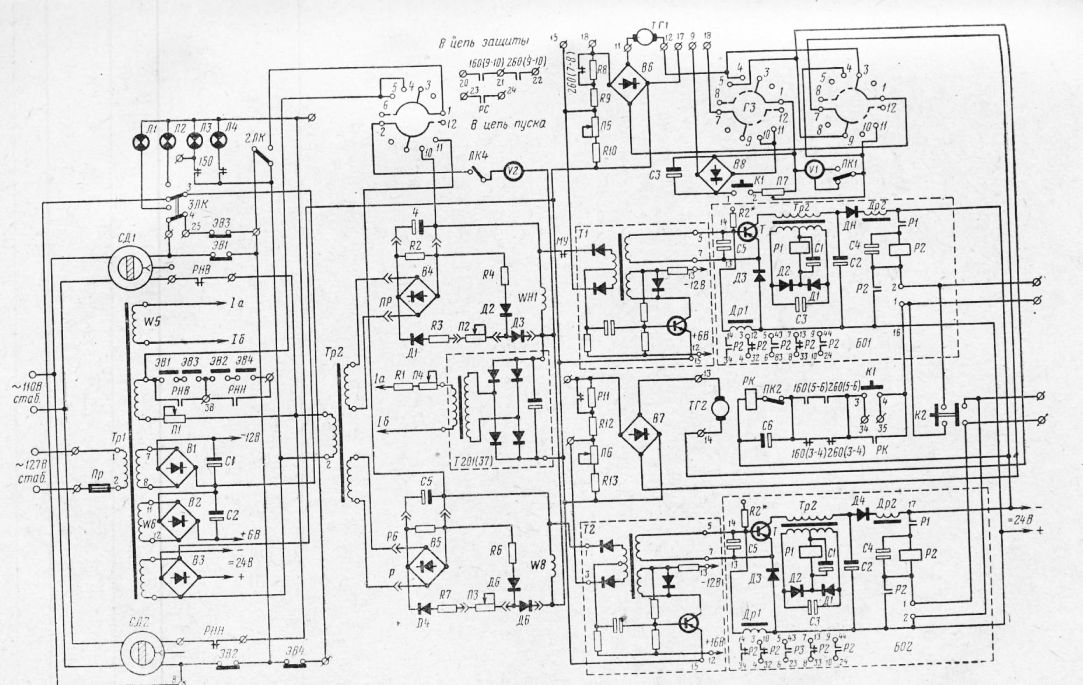
Рис. 9. Схема ограничителя скорости ЭОС-2
По окончании разгона этажные выключатели ЭВ1 и ЭВЗ размыкают цепь выходной обмотки сельсина СД1 и подключают на вход разделительного трансформатора напряжение постоянной уставки.
При переменной концевой нагрузке изменение скорости в процессе разгона различно и отклонение скорости достигает значений больше уставки ограничителя скорости. Однако эти отклонения вполне допустимы, и поэтому для исключения ненужных срабатываний защиты в последних моделях ограничителя скорости ЭОС-2 контроль скорости разгона устранен.
При подходе к точке начала замедления этажные выключатели ЭВ2 и ЭВ4 разрывают цепь постоянной уставки и подключают выходную обмотку сельсина СД2.
При движении подъемного сосуда в противоположном направлении задание контролируемой скорости происходит в обратной последовательности. Ограничитель обеспечивает защиту подъемной установки от превышения допустимой скорости движения в период разгона и равномерного хода не выше avm (где а — допустимое ПБ превышение фактической скорости над расчетным значением vm в период равномерного хода), т. е. на этих участках включается уставка максимальной скорости. При подходе к точке начала замедления уставка максимальной скорости переключается на выходную обмотку сельсина СД1 или СД2 в зависимости от направления движения.
Контроль цепей диодных функциональных преобразователей осуществляется с помощью магнитоуправляемого контакта, который в некоторых моделях отсутствует. Обмотки WMl и Wm2 магнитоуправляемого контакта служат нагрузкой ДФП. Обмотки включены таким образом, что их магнитные потоки направлены встречно. При этом размыкающий контакт МУК обеспечивает подачу напряжения, пропорционального заданной скорости, на вход нуль-органа Т1.
При всяком повреждении цепей диодных функциональных преобразователей изменяется величина тока в обмотке WMl или [WM2. Неуравновешенная составляющая магнитного потока одной из обмоток производит размыкание МУК. При движении подъемной машины это приводит к отпаданию выходного реле исполнительного устройства Б01.
Для проверки цепей действительной скорости кроме реле РКВ1 и РКВ2, которые подсоединяются соответственно к клеммам, установлено реле контроля РК. Реле РК втянуто только в том случае, если выходные реле блоков Б01 и Б02 находятся в одинаковом состоянии, т. е. оба втянуты или обесточены.
При эксплуатации аппарата АЗК-1 необходимо руководствоваться следующим.
1. Один раз в неделю производить детальный осмотр элементов аппарата, проверяя состояние этажных выключателей с подвижными рычагами, пружин с роликами микровыключателей, командоаппара-тов и программных дисков.
2. Один раз в полгода проверять состояние зубчатых передач привода аппарата, блоков сельсин-датчиков, редукторов программных устройств, устраняя ьсе обнаруженные Hcucnpai-ности.
3. Для предупреждения износа трущихся деталей периодически их смазывать и контролировать наличие смазки в узлах аппарата:
а) в приводе аппарата — смазку индустриальное масло «40» заливать до второго деления масломера с помощью резинового шланга длиной 0,5 м и лейки. Смазывать зубчатые передачи корректоров с помощью масленки, находящейся между двигателями, в которую масло заливать один раз в месяц;
б) в блоках сельсин-датчиков — смазку заливать в такую же масленку, как и для смазки зубчатой передачи корректоров;
в) в редукторах программных устройств — смазку индустриальное масло «40» заливать до второго деления масломера.
Выше рекомендуемых уровней масло заливать запрещается. В остальные подшипниковые узлы смазку закладывают при выпуске аппарата с завода.
4. В соответствии с правилами по обслуживанию подъемной установки перед началом каждой смены проверять исправность электрического ограничителя скорости.
Элементы схемы, позволяющие осуществлять такую проверку, вынесены на лицевую сторону крышки корпуса.
Возможна проверка срабатывания ограничителя в различных точках пути.
Проверку производят при неподвижной подъемной машине в определенном порядке:
а) правый подъемный сосуд устанавливают в нормальное верхнее положение. Галетный переключатель ставят в положение 2.
Переменным резистором П1 (кнопка взвода РК нажата) по вольтметру Fj на соответствующем пределе измерения устанавливают напряжение, соответствующее минимальной скорости.
Когда напряжение достигнет указанной величины, ЭОС-2 должен сработать, что определяется по загоранию лампы JI3.
Если для ограничителя скорости используется один тахогенера-тор и между клеммами 18 и 19 стоит перемычка, должна загораться и лампа JI4.
Аналогично производится проверка в положении 3 галетного переключателя. При этом должна загораться лампочка JI4;
б) тумблер ПК2 ставят в положение «Проверка». Переменным резистором П7 (кнопка взвода К1 нажата) устанавливают напряжение, соответствующее максимальной допустимой скорости защитной тахограммы.
При срабатывании ЭОС-2 в положении 2 и 3 галетного переключателя соответственно загораются лампы Л3 и Л4. Тумблер ПК2 возвращают в положение «Работа», галетный переключатель ставят в положение 1:
в) тумблер ПКЗ ставятся в положение «Проверка». Лампа JI1 должна загораться, это свидетельствует об исправности этажного выключателя ЭБЗ;
г) подъемный сосуд устанавливают на расстоянии 0,5 хр. Переменным резистором П1 (кнопка взвода РК нажата) устанавливают напряжение, соответствующее допустимой скорости защитной диаграммы. При этом в положении 2 и 3 галетного переключателя ЭОС-2 должен сработать;
д) подъемный сосуд перегоняют в точку, расположенную между срабатыванием этажных выключателей ЭВ1 и ЭВ2. В этом положении лампа JI1 должна погаснуть. Переменным резистором П1 (кнопка взвода РК нажата) устанавливают напряжение, соответствующее максимальной допустимой скорости защитной тахограммы. При этом в положении 2 и 3 галетного переключателя ЭОС-2 должен сработать, соответственно загорятся лампы JI3 и JI4. Галетный переключатель возвращается в положение 1
е) подъемный сосуд устанавливают в точку между срабатыванием ЭВ2 и ЭВ4. Лампа JI2 должны быть погашена. Остальная проверка по пункту д;
ж) подъемный сосуд устанавливают в нормальное крайнее положение. Лампа JI должна загореться как только подъемный сосуд опустится ниже точки срабатывания ЭВ4. Остальная проверка по пункту а.
Тумблер ПКЗ ставят в положение «Работа», галетный переключатель в положение 1, тумблер ПК4 в положение «Отключено».
Если при проверке не выполняется хотя бы один из пунктов, значит имеется неисправность ограничителя скорости. При неисправности отъемного блока ДФП и этажных выключателей их следует заменять.
Остальные повреждения устраняют на месте.
5. При эксплуатации необходимо:
— периодически проверять надежность затяжки клеммных зажимов и фиксирующих гаек переменных резисторов;
— периодически проверять качество заземления;
— следить за состоянием контактов реле блоков Б01, Б02, реле РК и этажных выключателей ЭВ;
— производить государственную поверку электроизмерительных приборов в сроки, установленные Государственным комитетом стандартов.
Рекламные предложения:
Главная → Справочник → Статьи → Форум
Механизация земляных работ
Механизация строительства
Механизация дорожных работ
Автоматизация строительства
→ Бетонные работы
→ Мини-тракторы
 Разделы
Разделы
Строительные машины и оборудование
→ Для специальных земляных работ
→ Дорожно-строительные машины
→ Строительное оборудование
→ Асфальтоукладчики и катки
→ Большегрузные машины
→ Строительные машины, часть 2,
→ Дорожные машины, часть 2
→ Ремонтные машины
→ Ковшовые машины
→ Автогрейдеры
→ Экскаваторы
→ Бульдозеры
→ Скреперы
→ Грейдеры
Эксплуатация строительных машин
→ Эксплуатация средств механизации
→ Эксплуатация погрузочных машин
→ Эксплуатация паровых машин
→ Эксплуатация экскаваторов
→ Эксплуатация подъемников
→ Эксплуатация кранов перегружателей
→ Эксплуатация кузовов машин
→ Крановщикам и стропальщикам
Ремонт строительных машин
Ремонт дорожных машин
Ремонт лесозаготовительных машин
Ремонт автомобилей КАмаЗ
Техническое обслуживание автомобилей
Очистка автомобилей при ремонте
Материалы и шины
Остались вопросы по теме:
"Аппарат задания и контроля хода АЗК-1"
— воспользуйтесь поиском.
→ Машины городского хозяйства
→ Естественная история машин
→ Транспортная психология
→ Пожарные автомобили
→ Автомобили-рефрижераторы
→ Монтаж и эксплуатация лифтов
→ Тракторы