Строй-Техника.ру
Строительные машины и оборудование, справочник
Стеллажные краны-штабелеры изготовляют в настоящее время в различных странах. Конструктивные их решения обусловлены традициями, технологическими возможностями, наличием освоенного производства узлов подъемно-транспортных машин, систем управления. В принципе компоновки стеллажных кранов-штабелеров однотипны.
Современный стеллажный кран-штабелер выполнен в виде нижней ходовой балки, оборудованной двумя без-ребордными колесами, к которой крепят одну или две колонны, имеющие сверху горизонтально расположенные направляющие ролики. Если устанавливают две колонны, то верхние их концы соединяют горизонтальной балкой. По колонне с помощью канатного или реже цепного привода механизма подъема перемещается консольно установленный грузоподъемник, несущий кабину управления и выдвижной телескопический- захват. На стеллажных кранах-штабелерах, предназначенных для поштучного отбора грузов, так называемых комплектовочных кранах-штабелерах, вместо выдвижных телескопических захватов можно устанавливать гладкие или роликовые столы, а также другие приспособления для укладки в стеллажи и отбора из стеллажей грузов.
Одноколонный стеллажный кран-штабелер имеет нижнюю ходовую балку, на которой установлены приводное и холостое колеса. К балке крепят колонну, на верхней части которой установлены горизонтальные ролики, удерживающие кран-штабелер в вертикальном положении.
Рекламные предложения на основе ваших интересов:
Дополнительные материалы по теме:
По колонне перемещается консольный грузоподъемник с кабиной оператора. Кабина оператора имеет небольшой свободный ход относительно грузоподъемника для того, чтобы полностью использовать высоту склада. На два телескопических захвата грузоподъемника устанавливается груз. Грузоподъемник по колонне перемещается с помощью канатного механизма подъема. Шкаф с электрооборудованием соединен с колонной кронштейном.
Двухколонные стеллажные краны-штабелеры применяют при больших высоте подъема и грузоподъемности. Кран-штабеллер имеет нижнюю опорную балку, на которой установлены приводное и холостое колеса. К опорной балке крепят две колонны, соединенные верхними концами продольной балки. На этой балке установлены две пары горизонтальных роликов 9 и механизм синхронизации, применяемый для уменьшения амплитуды перемещения верхней части колонны относительно ее нижней части.
Между колонн перемещается грузоподъемник, представляющий собой платформу, с двух сторон оборудованную каретками, ролики которых обкатываются по направляющим колонн. На грузоподъемнике установлена кабина оператора и выдвижные телескопические захваты, служащие для установки в стеллажи пакетированного груза. Грузоподъемник поднимается с помощью канатного механизма подъема, который установлен на одной колонне, а на второй — шкаф 8 с электрооборудованием. Для обслуживания механизма подъема и механизма синхронизации на одной из колонн крепят рабочие площадки, к которым по лестнице поднимается обслуживающий персонал.
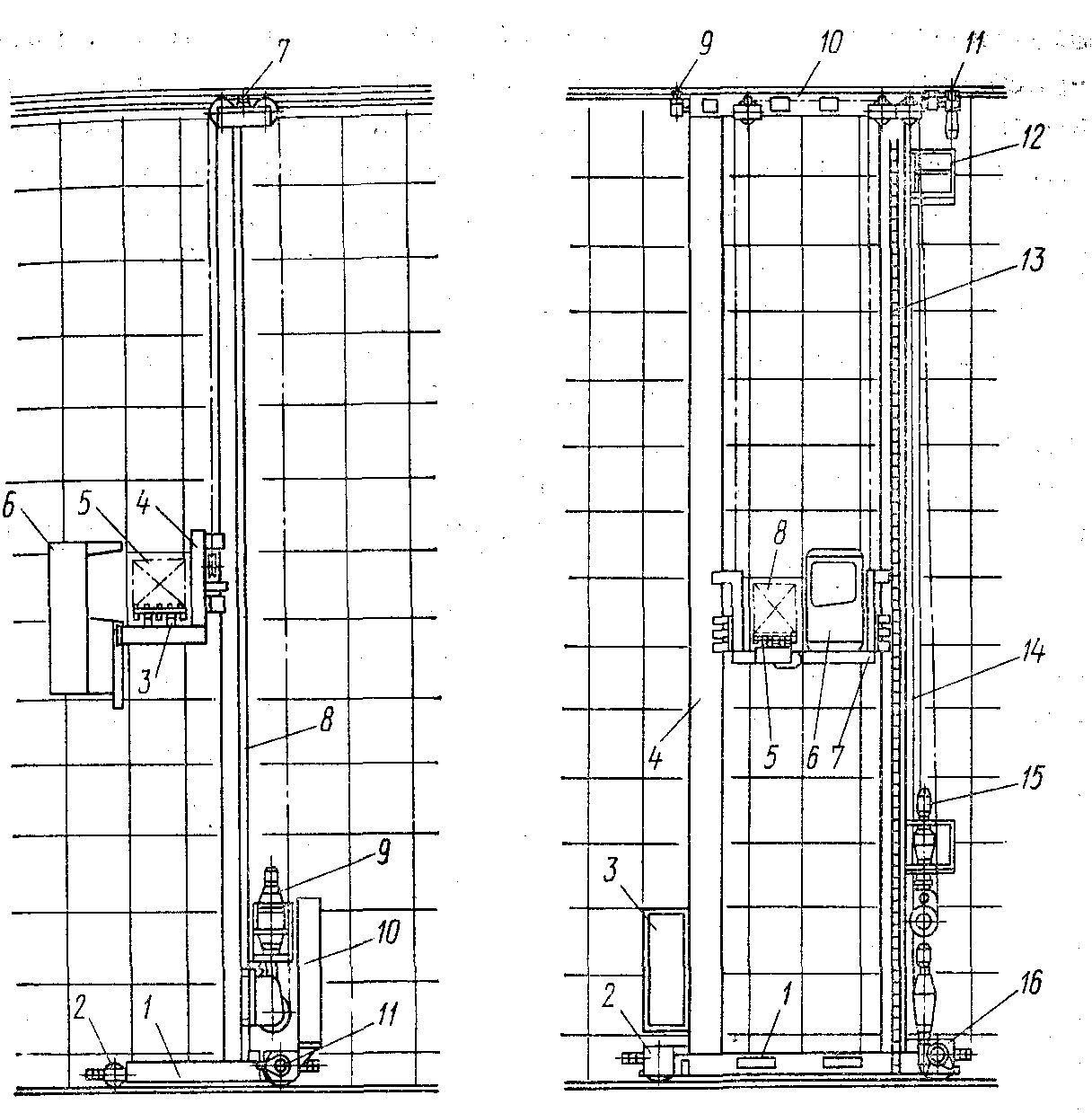
Рис. 1. Схема одноколонного стеллажного крана-штабелера
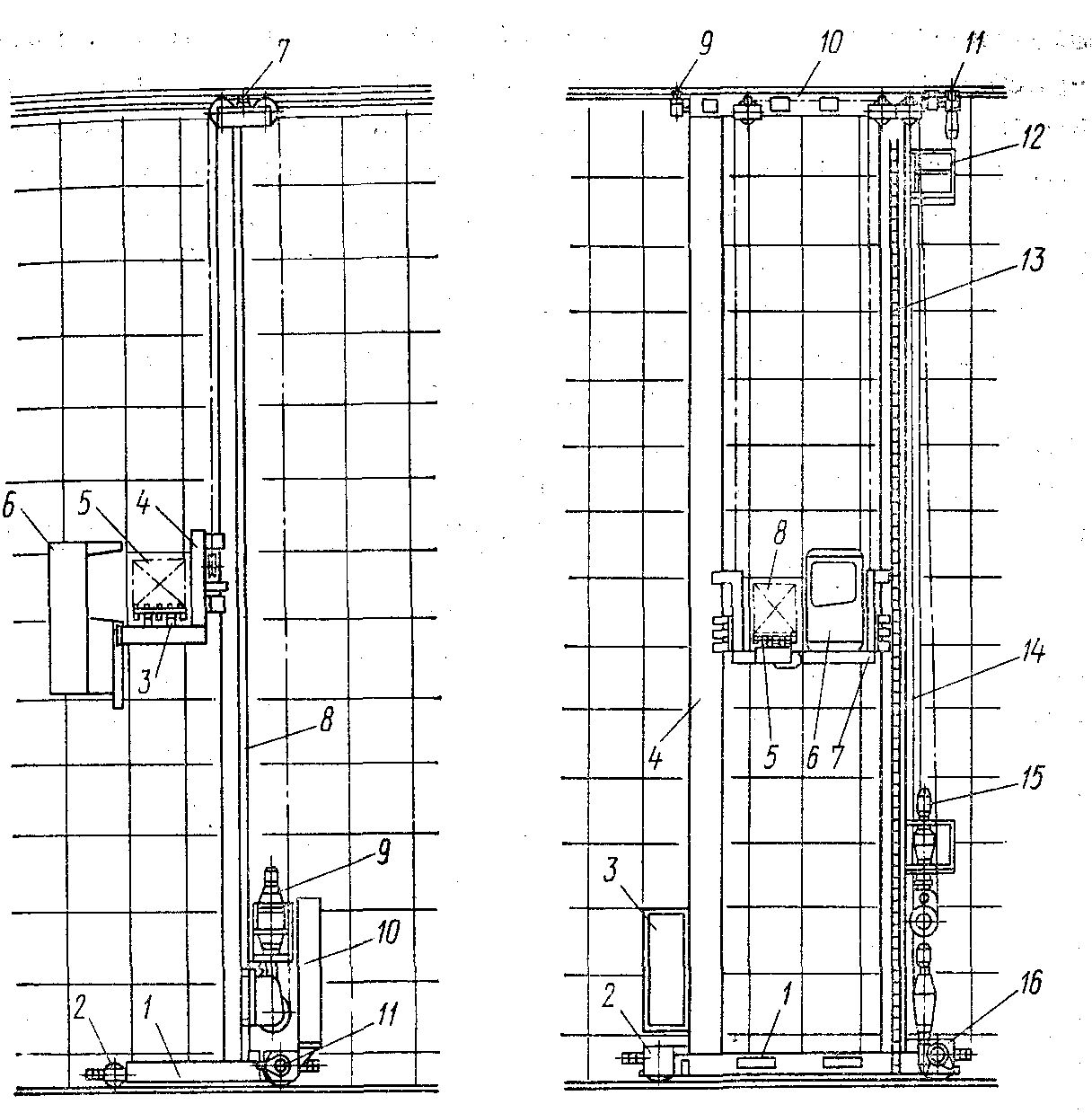
Рис. 2. Схема двухколонного стеллажного крана-штабелера
Сравнивая схемы этих кранов, нетрудно увидеть, что использование полезной высоты склада при применении двухколонных кранов-штабеле-ров хуже, чем в одноколонных (во-первых, из-за наличия верхней балки, соединяющей колонны, и, во-вторых, из-за того, что кабина не может вертикально перемещаться относительно грузоподъемника).
Одноколонную или двухколонную схему крана-штабелера выбирают прежде всего из условий обеспечения фиксированного положения груза на грузоподъемнике. При выдвижении груза инерционные силы приводят к поперечному перемещению рамы грузоподъемника в результате зазоров направляющих роликов грузоподъемника и закручивания колонн в поперечной плоскости. Очевидно, что это поперечное перемещение консольного грузоподъемника существенно больше, чем перемещение грузоподъемника, имеющего направляющие ролики, расположенные с обеих сторон по направлению движения крана-шатебелера. Поэтому при грузах массой более 2 т, при грузах, длина которых более 2—2,5 м и при большой высоте подъема (свыше 20 м) применяют двухколонные краны-штабелеры.
Одноколонные краны-штабелеры по сравнению с двухколонными имеют минимальные собственные массу и размеры; позволяют лучше использовать высоту помещения и более удобны при монтаже. Недостатками одноколонных стеллажных кранов-штабелеров являются относительно большое поперечное перемещение грузоподъемника и увеличенные нагрузки на направляющие катки грузоподъемника в результате его консольного расположения, и, как следствие этого, — большой износ катков и направляющих колонны.
Эти недостатки не оказывают существенного влияния при грузоподъемности кранов-штабелеров до 2,0—2,5 т. Однако при грузоподъемности свыше 2 т и при больших (свыше 2,5 м) размерах груза устранение этих отрицательных влияний путем увеличения прочности и жесткости металлоконструкций, увеличения диаметров направляющих катков грузоподъемника и расстояния между ними приводит к неоправданному увеличению массы и размеров кранов-штабелеров. В этих случаях предпочтение следует отдать двухколонной схеме, при которой кран-штабелер работает в значительно более благоприятных условиях.
Металлоконструкции кранов-штабелеров выполняют самыми различными способами. Нижние ходовые и верхние балки двухколонных кранов-штабелеров имеют, как правило, коробчатое сечение. Колонны кранов-штабелеров изготовляют в виде балок постоянного сечения или пространственных ферм.
Одноколонные краны-штабелеры чаще всего выполняют с колоннами в виде коробчатых балок.
Прямоугольное сечение колонн с приваренными направляющими в виде швеллеров достаточно технологично, особенно при использовании швеллеров с повышенной точностью проката. Однако оно может быть применено на кранах-штабелерах небольшой грузоподъемности.
Прямоугольное сечение с поперечной диафрагмой более технологично. Сечение образовано приваркой двух корытных профилей к диафрагме из листовой стали, которая обрабатывается только по наружным кромкам. Сечение может быть использовано на кранах-штабелерах различной грузоподъемности, так как толщина диафрагмы может быть выбрана в зависимости от действующих нагрузок. Недостатком является неэффективное использование металла, так как диафрагма расположена вблизи нейтральной линии сечения.
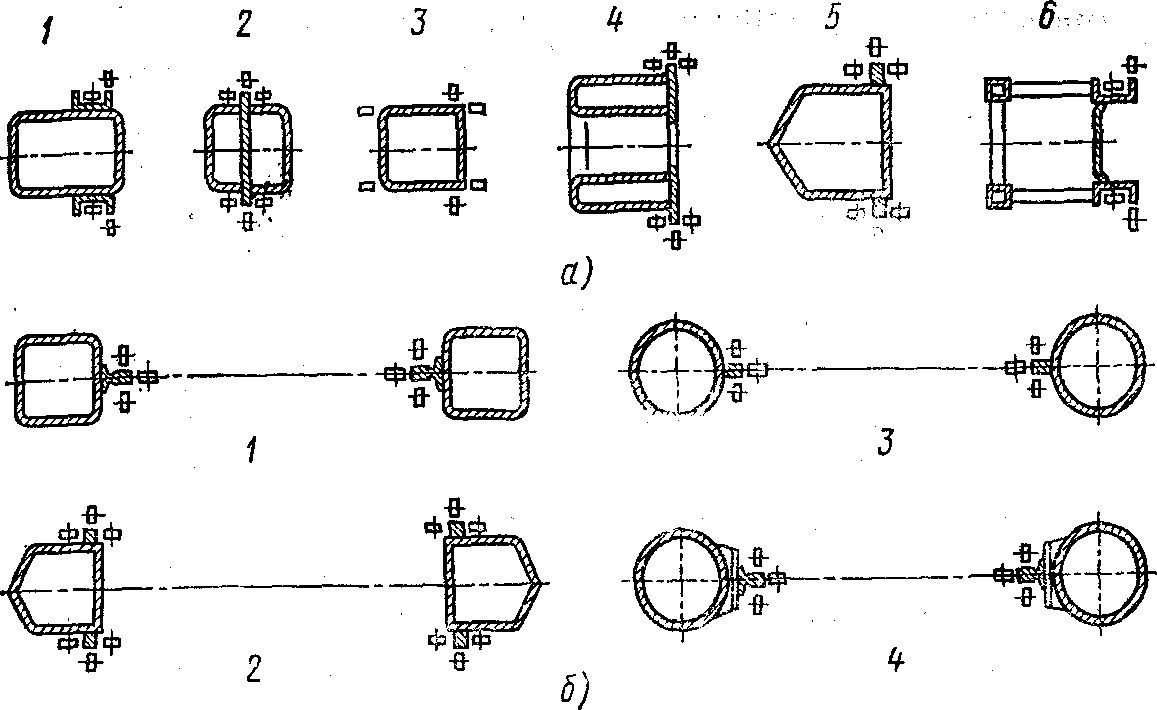
Рис. 3. Сечения различных типов колонн стеллажных кранов-штабелеров:
а — одноколонных; б — двухколонных
Прямоугольное или квадратное сечение колонн без направляющих применяют ограниченно, так как требуется большая точность сборки и сварки коробки во избежание зазоров в грузоподъемнике.
Составная колонна из двух профилей корытного сечения, замкнутых полосой из листовой стали, достаточно технологична, так как требуется обработка только наружных кромок полосы. В этом сечении более эффективно использован металл, чем в сечении 2, так как полоса находится в зоне максимальных напряжений и ее толщина может быть выбрана исходя из действующих нагрузок.
В коробчатом сечении 5 с приваренными обрабатываемыми направляющими наиболее эффективно использован металл. Колонны подобного сечения широко применяют. В результате обработки направляющих по трем плоскостям катания роликов, несмотря на определенное удорожание конструкции, обеспечиваются минимальные зазоры при работе грузоподъемника.
Решетчатая колонна в виде пространственной фермы 6 имеет сжатый пояс, который образован обработанными направляющими, выполненными из толстостенных специальных швеллеров. Растянутый пояс фермы, а также поперечные планки и раскосы выполнены из прямоугольных труб. Несмотря на относительную сложность изготовления, это сечение позволяет в максимальной степени уменьшить расход металла. Сечение подобного типа имеют стеллажные краны-штабелеры, выпускаемые Стахановским машиностроительным заводом.
Сечения колонн, выполненные в виде балок постоянного сечения и применяемые на двухколонных кранах-штабелерах, показаны на рис. 5, б.
Сечение 1 колонны, образованное двумя прямоугольными балками с приварными или съемными направляющими рельсами, установленными по центру сечения в продольной плоскости, является наиболее распространенным сечением. Направляющие могут быть как обработанными, так и необработанными в зависимости от условий работы крана-штабелера. В обоих случаях зазоры в грузоподъемнике и его поперечные смещения в этой конструкции колонн сведены к минимуму. Большой интерес представляет применение съемных направляющих, которые могут быть выверены по месту при монтаже крана-штабелера. При этом снижается стоимость обработки металлоконструкций крана-штабелера.
Сечение 2, образованное двумя коробчатыми колоннами с приваренными с двух сторон обработанными направляющими, позволяет обеспечить высокую степень унификации. При относительно еысокой стоимости изготовления колонн достигается Еысокая точность их сборки, создающая благоприятные условия работы грузоподъемника.
Сечения 3, 4 из труб с приваренными или съемными направляющими принципиально не отличаются от сечения. Применение труб позволяет снизить стоимость сборочно-сварочных работ при изготовлении колонн.
Стеллажные краны-штабелеры с колоннами решетчатой конструкции предназначены для работы на складах с большой высотой (до 40 м). Решетчатая пространственная конструкция позволяет создать необходимые прочность и жесткость металлоконструкций при сравнительно небольшой ее массе. Одним из преимуществ подобной конструкции является возможность размещения внутри фермы лестницы и площадки для входа в кабину крана-штабелера и его эвакуации в случае необходимости.
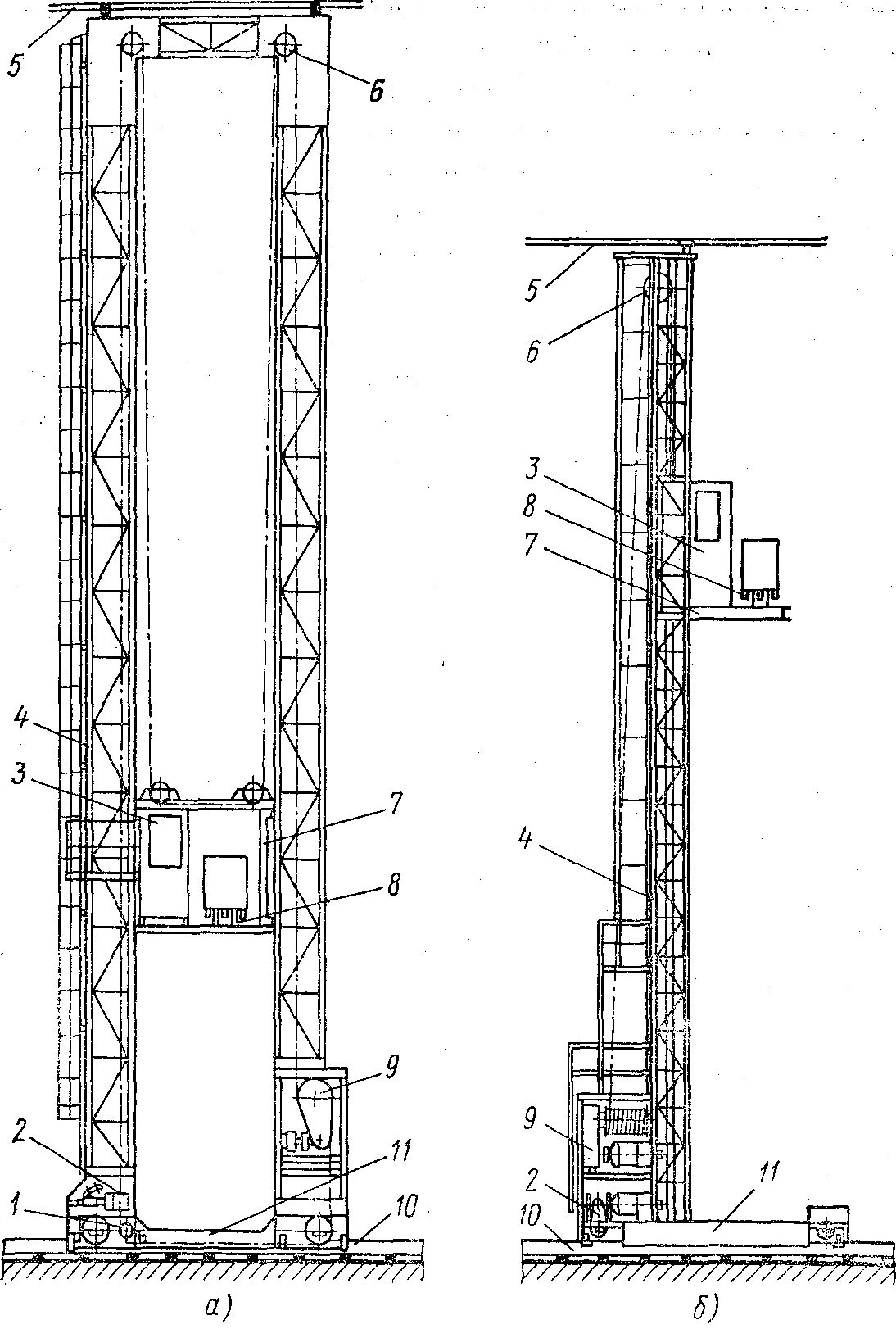
Рис. 6. Стеллажные кран-штабелеры фирмы «Манкесманн Гейзел»:
а — двухколонный; б — одноколонный; 1 нижний блок грузового каната; 2 — привод передвижения; 3 — кабина; 4 — колонна; 5 — направляющий рельс; 6 — верхний блок грузового каната; 7 — грузоподъемник; 8 »- телескопический захват; 9 привод подъема; 10 — крановый рельс; 11 – нижняя балка рамы
С этой целью грузоподъемник оборудуют дополнительной площадкой, с которой входят в кабину оператора по лестнице, проходящей внутри фермы. Подобное решение для складов, в которых хранятся грузы большого размера (до 1,6—2,0 м по ширине) и большой массы (2,0—2,5 т), очень эффективно, так как нет необходимости увеличивать размеры межстеллажных проходов.
При высоте складов более 20 м колонны обычно транспортируют секциями, собираемыми непосредственно на стройплощадке склада. В этих случаях колонны в виде ферм особенно удобны, так как стыки металлоконструкций выполняют традиционными способами, при которых не требуется специальная обработка фланцев и их точная подгонка. Направляющие для грузоподъемника на кра-нах-штабедерах с колоннами из отдельных секций устанавливают при монтаже крана-штабелера на месте.
Основным узлом крана-штабелера, с помощью которого устанавливают в стеллаж грузы и вынимают их из стеллажа, является грузоподъемник, представляющий собой металлоконструкцию, в которую входят: ролики перемещения по направляющим колонны; канатные блоки или устройства для крепления цепей; выдвижной телескопический захват или загрузочный стол; кабина оператора и электрооборудование; ловители, обеспечивающие посадку грузоподъемника на колонну в случае обрыва несущих органов (каната, цепи) или при увеличении скорости опускания сверх допустимой.
На некоторых кранах-штабелерах, обычно с небольшой высотой подъема, имеющих автоматическое управление, кабину оператора на грузоподъемнике не устанавливают. В этом случае не требуются и ловители.
Грузоподъемники в зависимости от конструкции рамы крана-штабелера выполняют или консольными — для одноколонных кранов-штабелеров или подвесными — для двухколонных.
Консольный грузоподъемник имеет Ь-образную раму, на вертикальной стойке которой установлены ролики, охватывающие направляющие колонны, канатный блок (или устройство для крепления грузовой цепи), ловители и другие элементы, взаимодействующие с колонной. На горизонтальной части рамы установлены выдвижной телескопический захват (или приемный стол) с приводом и кабина оператора. Кабина оператора с целью максимального использования высоты подъема должна иметь определенный свободный ход (0,6—1,0 м) относительно грузоподъемника. Для этого на кабине устанавливают направляющие, по которым она может перемещаться относительно грузоподъемника, а на последнем на необходимой высоте — упор.
Выдвижной телескопический захват и кабина оператора могут быть различно расположены относительно вертикальной стойки грузоподъемника (колонны), что вызвано прежде всего необходимостью снижения нагрузок, передаваемых грузоподъемником на колонну. При грузоподъемности крана-штабелера 0,5 т и выше масса телескопических захватов с грузом больше, чем масса кабины с оператором. При расположении телескопических захватов между колонной и кабиной центр масс находится ближе к колонне, чем при расположении кабины между колонной и телескопическими захватами. Поэтому в первом случае как статическая нагрузка на колонну от массы грузоподъемника, так и динамическая нагрузка, возникающая при выдвижении захвата и закручивающая колонну, уменьшаются.
На кранах-штабелерах грузоподъемностью свыше 0,5 т, как правило, кабина оператора расположена на свободном конце грузоподъемника, противоположном колонне. При этом и упрощается конструкция грузоподъемника, уменьшается его масса и улучшаются условия входа оператора в кабину.
В кранах-штабелерах малой грузоподъемности, а также в кранах-штабелерах, предназначенных для поштучного отбора грузов и оборудованных гладкими или роликовыми приемными столами, масса кабины больше массы приемного стола с грузом. Поэтому кабину устанавливают со стороны колонны. В раме грузоподъемника вырезают окно для кабины,- которая с помощью направляющих вертикально перемещается в этом окне для полного использования высоты складов. В кабину входят со стороны приемного стола, который опускается в крайнее нижнее положение.
На двухколонных кранах-штабелерах передаваемые на колонны нагрузки не зависят от взаимного расположения телескопических захватов (приемных столов) и кабины оператора, так как грузоподъемник выполняют подвесным (на двух канатах или цепях). Вход в кабину оператора осуществляется через боковые двери, причем для входа и выхода оператора кран-штабелер должен быть выдвинут за пределы стеллажей. При аварийной остановке крана-штабелера внутри межстеллажного прохода эвакуировать оператора очень сложно. Для этого на двухколонных кранах-штабелерах или устанавливают специальные площадки, как например на кранё-штабелере фирмы «Маннесманн Гейзел», или кабину оператора выносят за пределы колонн. В последнем случае легче обеспечить необходимые условия безопасной работы оператора крана-штабелера, так как имеется возможность его эвакуировать, установить ловители, которые подхватывают лишь кабину, без грузоподъемника. Однако ухудшается обзор из кабины рабочих органов крана-штабелера, так как колонна закрывает обзор средней части грузоподъемника. На кранах-штабелерах с автоматическим управлением ухудшение обзора малосущественно.
Конструкция кабин операторов, телескопических захватов и приемных столов зависит от назначения кранов-штабелеров (для пакетной или поштучной переработки грузов). Конструкция приводов механизмов подъема, передвижения или выдвижения захватов в основном зависит от технических параметров кранов-штабелеров: грузоподъемности, высоты подъема груза, рабочих скоростей.
Работа механизмов при таких скоростях возможна только при большом диапазоне регулирования скоростей механизмов. Для остановки крана-штабелера (грузоподъемника) точно против требуемой ячейки (позиционирование) необходимо, чтобы кран-штабелер и грузоподъемник подходили к ячейке на низких установочных скоростях. При ручном управлении эти скорости не должны превышать 6— 8 м/мин, при автоматическом — 2—4 м/мин. При этих скоростях можно с точностью до нескольких миллиметров останавливать соответствующий механизм. Для приводов подъема и передвижения наиболее часто применяют тиристорные преобразователи постоянного или переменного тока. За рубежом находят применение специальные электродвигатели с микроприводами, позволяющие получить низкие установочные скорости (0,8—1,2 м/мин) при сохранении необходимого крутящего момента. Эти приводы значительно дороже, чем приводы с обычными электродвигателями, однако позволяют достигать высокой точности позиционирования.
Краны-штабелеры оборудованы тиристорными преобразователями и электродвигателями постоянного тока с диапазоном регулирования 50 : 1. Недостатком применения тиристорных приводов является уменьшение крутящего момента на валу электродвигателя (приводного колеса) и отсюда — повышение требований к качеству монтажа кранового пути.
Краны-штабелеры с относительно низкими скоростями механизмов (подъема — 8—12 м/мин, передвижения — 60—80 м/мин), с ручным управлением оборудуют двух-или многоскоростными асинхронными электродвигателями. Стоимость таких приводов значительно меньше стоимости тиристорных приводов, равно как и стоимость обслуживания и ремонта. Двухскоростные электродвигатели с соотношением скоростей 8 : 1 широко применяют на стеллажных кранах-штабелерах производства НРБ.
Механизмы подъема стеллажных кранов-штабелеров принципиально мало отличаются от соответствующих механизмов других грузоподъемных машин. В подавляющем большинстве на стеллажных кранах-штабелерах применяют канатные механизмы подъема. Механизм подъема, как правило, состоит из электродвигателя, тормоза, редуктора и канатного барабана. Эти механизмы имеют определенные ширину, ограниченную шириной межстеллажного прохода, и длину, непосредственно зависящую от длины крана-штабелера. Поэтому наибольшее распространение получила вертикальная компоновка механизма подъема. Основой механизма является вертикальный конусно-цилиндрический редуктор, который крепят к задней стенке колонны. Канатные барабаны устанавливают или на двух концах выходного вала по обе стороны редуктора (в этом случае используют канат без полиспаста), или на одном конце вала, тогда груз поднимают с помощью полиспаста, а свободный конец каната через блоки крепят к ограничителю грузоподъемности. На редуктор сверху помещают фланцевый вертикальный электродвигатель. Тормоз устанавливают на тормозной муфте, соединяющей редуктор с электродвигателем.
Стеллажные краны-штабелеры могут иметь иную компоновку механизма подъема. На них используют стандартные червячные или цилиндрические крановые редукторы и тормозы вертикального исполнения. Редуктор и электродвигатель установлены горизонтально по продольной оси крана-штабелера. Канатный барабан установлен или на выходном валу редуктора, или соединен с редуктором зубчатой передачей. Длина подобного механизма больше, чем механизма при вертикальной компоновке. Однако на размерах крана-штабелера такая компоновка механизма подъема не сказывается, так как его встраивают внутрь решетчатой колонны.
Описанная компоновка механизма подъема выгодна тем, что при ее использовании не требуются специальные конусно-цилиндрические редукторы, стоимость которых больше, чем червячных или- цилиндрических.
Механизмы передвижения принципиально не отличаются от механизмов передвижения других грузоподъемных устройств. Они состоят из электродвигателя, тормоза и редуктора, соединенного с ходовым колесом. Подобно механизмам подъема, механизмы передвижения, как правило, имеют вертикальную компоновку. Механизмы передвижения большинства зарубежных фирм выполнены в виде вертикального конусно-цилиндрического или червячного редуктора, установленного на валу приводного колеса или соединяемого с. ним открытой зубчатой передачей. На редукторы вертикально устанавливают фланцевые электродвигатели со встроенным тормозом. Широко применяют электродвигатели с микроприводом, обеспечивающие большой диапазон регулирования скоростей при постоянном крутящем моменте.
На многих типах кранов-штабелеров, в том числе на стеллажных кранах-штабелерах отечественного производства, механизм передвижения выполнен в виде вертикального цилиндрического редуктора с полым выходным валом, насаженного на вал приводного колеса. Выходной вал редуктора соединен с электродвигателем с помощью тормозной муфты. Электродвигатель расположен горизонтально над ходовой балкой крана-штабелера. Такая компоновка более эффективна, так как этот механизм лучше вписывается в габариты крана. С целью сокращения длины кранов-штабелеров механизм подъема, как правило, расположен над механизмом передвижения. При большой высоте механизма передвижения механизм подъема приходится устанавливать достаточно высоко, что усложняет его обслуживание.
Механизм передвижения всегда выполняют на одном из ходовых колес, расположенном для двухколонных кранов-штабелеров со стороны более нагруженной колонны и для одноколонных — со стороны колонны.
Механизмы выдвижения телескопических захватов чрезвычайно разнообразны по конструкции. Их компоновка зависит от конструкции телескопических захватов и других конструктивных решений. Они состоят из электродвигателя, тормоза и редуктора. Редукторы соединены с приводными валами телескопических захватов различными способами: карданными валами, цепными и зубчатыми цилиндрическими передачами и т. п.
Рекламные предложения:
Главная → Справочник → Статьи → Форум
Механизация земляных работ
Механизация строительства
Механизация дорожных работ
Автоматизация строительства
→ Бетонные работы
→ Мини-тракторы
 Разделы
Разделы
Строительные машины и оборудование
→ Для специальных земляных работ
→ Дорожно-строительные машины
→ Строительное оборудование
→ Асфальтоукладчики и катки
→ Большегрузные машины
→ Строительные машины, часть 2,
→ Дорожные машины, часть 2
→ Ремонтные машины
→ Ковшовые машины
→ Автогрейдеры
→ Экскаваторы
→ Бульдозеры
→ Скреперы
→ Грейдеры
Эксплуатация строительных машин
→ Эксплуатация средств механизации
→ Эксплуатация погрузочных машин
→ Эксплуатация паровых машин
→ Эксплуатация экскаваторов
→ Эксплуатация подъемников
→ Эксплуатация кранов перегружателей
→ Эксплуатация кузовов машин
→ Крановщикам и стропальщикам
Ремонт строительных машин
Ремонт дорожных машин
Ремонт лесозаготовительных машин
Ремонт автомобилей КАмаЗ
Техническое обслуживание автомобилей
Очистка автомобилей при ремонте
Материалы и шины
Остались вопросы по теме:
"Общая компоновка кранов-штабелеров"
— воспользуйтесь поиском.
→ Машины городского хозяйства
→ Естественная история машин
→ Транспортная психология
→ Пожарные автомобили
→ Автомобили-рефрижераторы
→ Монтаж и эксплуатация лифтов
→ Тракторы