Строй-Техника.ру
Строительные машины и оборудование, справочник
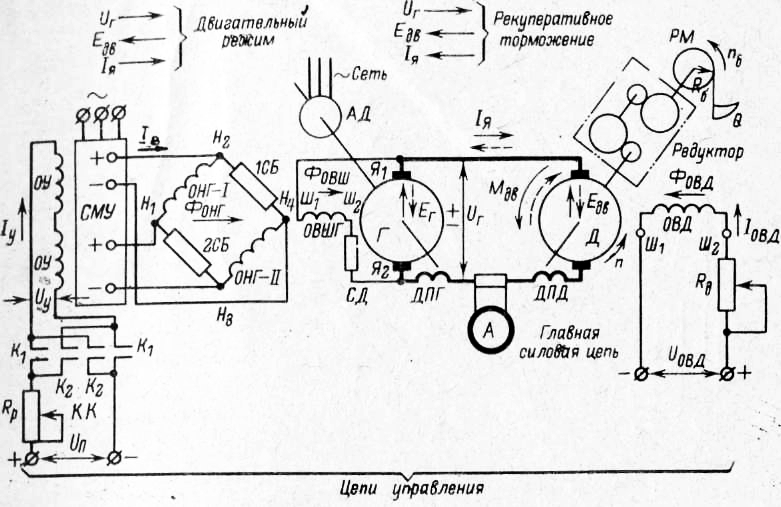
В системе Г—Д экскаватора типа Э-2503, упрощенная схема которой изображена на рис. 1, различают главную силовую (якорную) цепь и цепь управления возбуждением генератора и двигателя.
Главная силовая цепь в системе Г—Д. Якорь двигателя Д каждого рабочего механизма подъема, поворота, напора электрически соединяется с якорем генератора Г. В замкнутый контур главной силовой цепи вводятся обмотки дополнительных полюсов генератора ДПГ и двигателя ДПД, а также включается шунт для присоединения амперметра, измеряющего ток в главной цепи.
В системе Г—Д любой режим рабочего двигателя (пуск, торможение, регулирование частоты вращения) может быть получен изменением величины и знака подводимого к зажимам рабочего двигателя напряжения.
Рекламные предложения на основе ваших интересов:
Дополнительные материалы по теме:
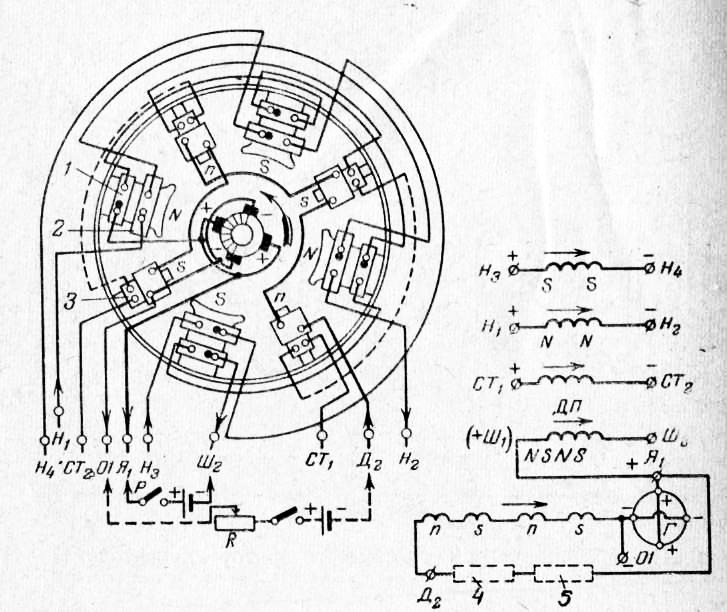
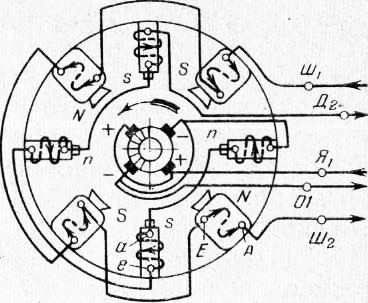
Генераторы типа ПЭМ экскаватора Э-2503 состоят из следующих основных частей (рис. 2): станины с четырьмя главными и четырьмя дополнительными полюсами, якоря с коллектором и траверсы со щеткодержателями. На главных полюсах помещается по две обмотки возбуждения (независимая и параллельная).
Независимая обмотка возбуждения выполняется в виде двух полуобмоток — ветвей (Hi—Я2 и Яз—Я4), работающих согласованно, питающихся от блока силовых магнитных усилителей СМУ (см. рис. 2). Шунтовая обмотка имеет маркировку Шi—Ш2 (рис. 2).
У всех генераторов ПЭМ один конец обмотки дополнительных полюсов выводится на доску зажимов, а другой присоединяется внутри машины непосредственно к щеткам (т. е. к якорю). От этой точки присоединения сделан отвод на доску зажимов для подключения цепей управления. Катушки главных и дополнительных полюсов генераторов постоянного тока должны иметь правильное чередование полярностей главных и дополнительных полюсов между ними и обмоткой якоря (при правильном чередовании за положительным главным полюсом должен быть расположен по направлению вращения дополнительный полюс противоположной полярности). Если чередование нарушено, щетки недопустимо искрят.
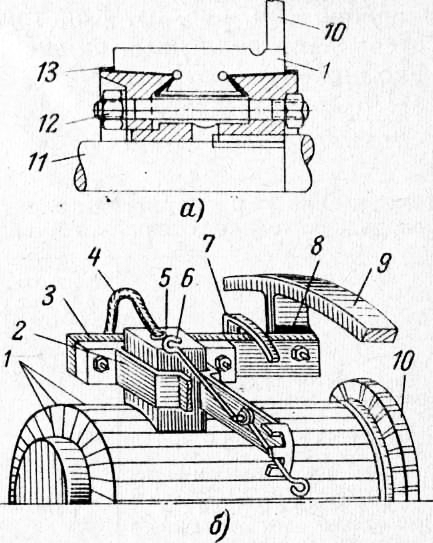
Коллектор (рис. 4) собран из клинообразных пластин твердотянутой электротехнической меди, изолированных миканитом.
Щеточная траверса крепится к специальной заточке в ступице подшипникового шита, укрепляемого на корпусе генератора. К ней привинчиваются четыре бракета (штыря) 3, изолированных от траверсы изоляционными прокладками. К бракетам крепятся щеткодержатели со вставленными щетками марки ЭГ-4.
Генераторы постоянного тока типа ПЭМ, питающие электродвигатели главных рабочих механизмов (подъема, напо<ра, поворота), комплектуются в одну генераторную группу, называемую главным преобразовательным агрегатом. Главный преобразовательный агрегат устанавливают на поворотной платформе в кузове экскаватора. На экскаваторе Э-2503 установлен главный преобразовательный агрегат, состоящий из двух однокорпусных ашрегатов типов
ОПАМ 140-160/1470 и ОППМ55-36/1470. Оба агрегата монтируются на одной фундаментной плите и соединяются муфтой сцепления, образуя один общий преобразовательный агрегат.
Однокорнуонып агрегат типа ОПАМ 140-160/1470 состоит из двух электрических машин: генератора подъема типа ПЭМ-1320 и приводного сетевого асинхронного двигателя с короткозамкнутым ротором типа МА-94-74/16. Обе электрические машины смонтированы на двух щитовых подшипниках качения. Сдвоенный якорь имеет один свободный конец вала со стороны двигателя. Одно-корпусный агрегат типа ОППМ55-36/1470 состоит из генератора поворота типа ПЭМ-750 и генератора напора типа ПЭМ-400. Оба генератора смонтированы на общем валу в одном корпусе на двух щитовых подшипниках качения. Свободный конец сдвоенного якоря расположен со стороны генератора поворота.
Главные электродвигатели постоянного тока типов ДПВ и ДПЭ используются как приводные двигатели главных рабочих механизмов: подъема и хода, поворота и напора. Конструктивное исполнение двигателей, установленных на экскаваторе типа Э-2503 опи сано ниже.
При работе двигателя всегда имеет место равновесие э. д. е., а также моментов.
Отсюда очевидно, что величина тока в главной цепи в установившемся режиме машины (двигателя) с независимым возбуждением (Фовд=пост) прямо пропорциональна величине статической нагрузки на валу двигателя Мс.
Полученные уравнения дают возможность определить значения тока в главной цепи системы Г—Д и частоты вращения двигателя для любого установившегося режима.

Учитывая, что электрическое сопротивление якоря генератора имеет величину того же порядка, что и сопротивление якоря двигателя, необходимо считаться с падением напряжения в якоре генератора. При неизменном значении э. д. с. генератора напряжение на его зажимах изменяется с изменением нагрузки. Таким об? разом, для точных расчетов в уравнении механической характеристики двигателя за неизменный параметр следует принять не напряжение генератора Ur, как это принято было нами выше, а э. д. с. генератора Ег, которая не зависит от нагрузки.
Из уравнения механической характеристики следует, что при заданных, например, номинальных значениях э. д. с. генератора и тока возбуждения двигателя частота вращения двигателя зависит от нагрузки. Чем,больше момент сопротивления двигателя, тем меньше частота вращения двигателя. Такая мехамическая характеристика двигателя изобразится прямой, показанной на рис. 9. Угол наклона этой прямой к (горизонтальной оси определяется величиной сопротивления главной цепи, точнее падением напряжения на этом сопротивлении. Чем значительнее падение, тем более мягкая характеристика двигателя и, наоборот, если скорость мало изменяется даже при значительно возросшей нагрузке двигателя, его характеристика считается жесткой.
Различают регулирование частоты вращения двигателя и ее изменение соответственно механической характеристике, вызванное изменением момента сопротивления рабочего механизма.
Под регулированием скорости вращения понимается принудительное (искусственное) ее изменение при заданном моменте.
Конструктивное исполнение рабочих электродвигателей постоянного тока типов ДПЭ и ДПВ. Конструктивно каждый двигатель выполнен из тех же составных частей, что и генератор типа ПЭМ: стального корпуса с подшипниковыми щитами, четырех главных и четырех добавочных полюсов с катушками, якоря с коллектором и 4 комплектами щеткодержателей, закрепленных на поворотной траверсе, которая позволяет при наладке двигателя устанавливать щеткодержатели на нейтрали.
Главные и дополнительные полюсы должны плотно прилегать к корпусу электродвигателя. Если между корпусом электродвигателя и сердечником полюса остается незначительный зазор, то вследствие уменьшения магнитного потока главного полюса может повыситься частота вращения электродвигателя. Неплотное прилегание сердечников дополнительных полюсов к корпусу двигателя может быть также причиной возникновения искрения под щетками.
У двигателей за главным полюсом в направлении вращения якоря должен следовать дополнительный полюс той же полярности. При неправильной полярности или чередовании главных и дополнительных полюсов электродвигатель будет сильно искрить и не сможет развивать вращающий момент достаточной величины.
Цепь управления возбуждением генератора и двигателя в системе Г—Д служит для целей регулирования частоты вращения двигателя того или иного рабочего механизма при работе экскаватора Э-2503.
В системе Г—Д применяются два способа регулирования частоты вращения рабочего двигателя: изменением э. д. с. (напряжения, приложенного к двигателю) и изменением величины магнитного потока возбуждения двигателя.
При первом способе частота вращения двигателя Д регулируется регулировочным реостатом. От сопротивления этого реостата зависят величина тока /у в об-отке управления ОУ силового магнитного усилителя СМУ, ток выхода последнего, поток возбуждения генератора и, следовательно, э. д. с.
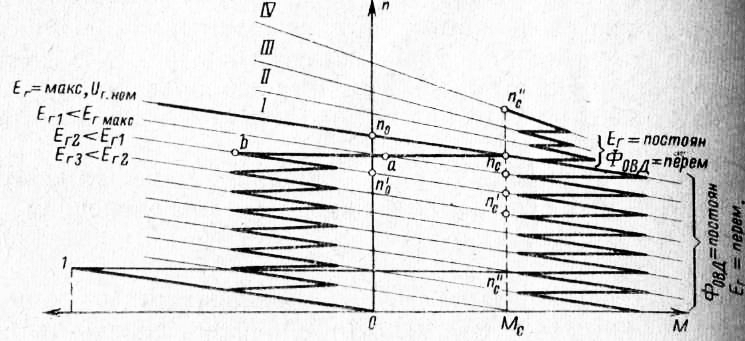
Очевидно, что каждому значению тока возбуждения генератора соответствует определенное значение его э. д. с. и, следовательно, своя механическая характеристика, т. е. получается семейство механических характеристик, параллельных основной характеристике, причем все семейство характеристик располагается ниже основной механической характеристики. Следовательно, изменяя ток возбуждения 1 в или напряжение UB, приложенное к обмотке возбуждения генератора ОНГ, можно регулировать частоту вращения двигателя Д. Это — первая зона регулирования.
Второй способ регулирования скорости рабочего механизма осуществляется путем изменения тока возбуждения двигателя с помощью реостата в цепи его обмотки возбуждения (см. рис. 6). Увеличивая сопротивление реостата Rn, можно уменьшить магнитный поток двигателя Фовд (ослабить его поле возбуждения). При этом, если к двигателю подведено номинальное напряжение £Л-.ном, то частота вращения двигателя в области малых нагрузок изменяется в сторону увеличения от номинального значения, так как частота вращения его согласно формуле (7) обратно пропорциональна величине магнитного потока двигателя. В области больших нагрузок (выше номинальной) прямые II—IV пересекают основную механическую характеристику и располагаются ниже ее.
Таким образом, при изменении магнитного потока двигателя характеристика его частично располагается выше основной механической характеристики. Это — вторая зона регулирования.
Необходимо заметить, что если ток возбуждения двигателя ослабляется, допустим, в 2 раза, то при этом вследствие насыщения магнитной цени двигателя в номинальном режиме скорость возрастает не в 2 раза, а не более чем в 1,5—1,6 раза.
Следовательно, каждому значению э. д. с. генератора и магнитного потока двигателя соответствует своя механическая характеристика.
Реверсирование двигателя осуществляется изменением направления тока в обмотке возбуждения генератора при помощи контактов командоконтроллера. При этом изменяется полярность наряжении на щетках генератора, а следовательно, и направление вращения двигателя.
Обмотка независимого возбуждения рабочего двигателя Д питается от независимого источника постоянного тока, в качестве которого на экскаваторе Э-2503 используется вспомогательный генератор-возбудитель В типа П-52 (6,8 кет, 115 в, 1 450 об/мин), входящий в состав вспомогательного преобразовательного агрегата. В состав последнего входит также приводной асинхронный корогкозамкнутый двигатель типа А061-4 (10 кет, 380 в, 1 450 об/мин). Вспомогательный возбудительный агрегат устанавливается над главным преобразовательным агрегатом.
Перед пуском в ход двигателя в системе Г—Д в его обмотке возбуждения ОВД устанавливают номинальный ток, что позволяет обеспечить достаточный пусковой момент двигателя.
Ток возбуждения генератора, вращаемого двигателем с постоянной частотой, в начале пуска равен нулю. Затем, уменьшая сопротивление реостата Rp, т. е. увеличивая ток /в генератора, повышают э. д. с. генератора. Это приводит к появлению тока в якорной цепи и возникновению вращающего момента двигателя. После того как вращающий момент станет больше статического, якорь двигателя начнет вращаться.
При уменьшении сопротивления Rp меняется величина тока /в и происходит переход с одной механической характеристики на. другую. Обычно реостат, а точнее командоконтроллер в цепи обмотки возбуждения генератора имеет несколько ступеней, однако из-за значительной индуктивности обмотки возбуждения нарастание тока в ней происходит плавно.
Поэтому вращающий момент двигателя увеличивается постепенно, что позволяет получить очень плавный пуск двигателя.
Для того чтобы уменьшить частоту вращения вплоть До полной остановки двигателя, работающего, допустим, а характеристике, соответствующей номинальному напряжению гУг,ном, постепенно увеличивают сопротивление реостата Rp. Это приводит к уменьшению тока возбуждения генератора, а следовательно, к снижению его магнитного потока. Вследствие этого э. д. с. Ег генератора также начинает снижаться.
начнет уменьшаться, что приведет к снижению вращающего момента двигателя. Под действием статической нагрузки Мс скорость будет падать и произойдет замедление двигателя. Если ток возбуждения уменьшить до такой степени, чтобы э. д. с. Ег стало меньше э. д. с. Еяв, то согласно (8) ток в цепи якорей изменит направление. Двигатель перейдет в режим генератора, преобразуя запасенную механическую энергию в электрическую и отдавая ее генератору управления Г, который будет работать в режиме двигателя. Его вращающий момент вследствие изменения знака тока якоря изменит направление и будет действовать согласно с вращающим моментом двигателя АД (см. рис. 6). Последний перейдет в генераторный режим, станет преобразовывать полученную от генератора управления, работающего двигателем, механическую энергию в электрическую и отдавать ее в сеть переменного тока. Такой режим работы системы Г—Д, называемый рекуперативным, будет продолжаться до тех пор, пока э. д. с. генератора будет меньше э. д. с. двигателя.
Рекуперативное торможение относится к числу наиболее экономичных видов торможения, и его следует ти-менять всегда, если для этого есть возможность. Кроме этого вида торможения, имеются еще и другие: динамическое и противовключением, на рассмотрении которых останавливаться не будем.
Обычно в системах Г—Д ток возбуждения в обмотке ОНГ генератора имеет небольшую величину по сравнению с током якоря. Поэтому размеры и вес аппаратуры управления невелики, а потери энергии на управление незначительны. Однако с целью некоторого снижения необходимой мощности независимого возбуждения используется шунтовая обмотка ОВШГ, постоянно подключенная на напряжение генератора к его якорю.
Рациональным соотношением мощностей независимого и параллельного возбуждения генераторов, применяемых на экскаваторе Э-2503, считается: независимого 70—75 и параллельного 25—30%’ номинальной мощности возбуждения. Все-таки, даже применяя шунтовую обмотку генератора, при тех мощностях привода, которые используются на экскаваторе Э-2503, ток возбужде-ния /в оказывается относительно большим (порятка 0,4—8,5 а) и для уменьшения потерь управления, а также с целью создания возможности формирования экскаваторных характеристик в цепь возбуждения вводят силовой магнитный усилитель СМУ.
Силовые магнитные усилители трехфазные двухтактные типа ПДД1.1В. Для выяснения принципа действия трехфазного магнитного усилителя, используемого на экскаваторе Э-2503, рассмотрим принцип работы простейшего магнитного усилителя.
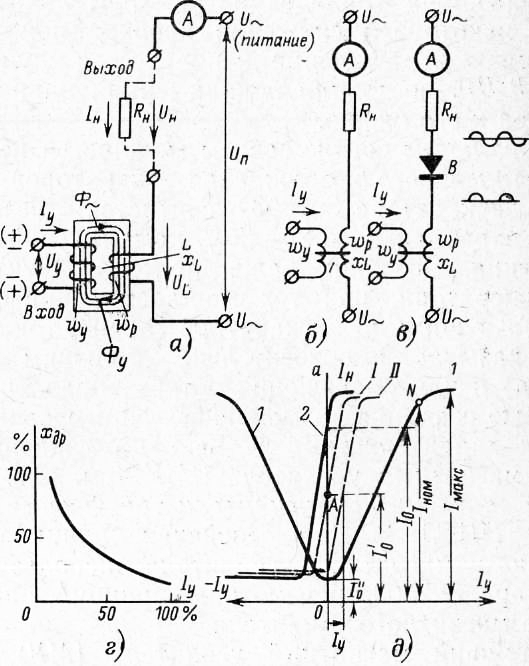
Простейший магнитный усилитель (МУ) представляет собой управляемый дроссель, изображенный на рис. 8,а. Усилитель состоит из последовательно соединенных сопротивлений Rn (которое принято называть нагрузкой) и индуктивной катушки (дросселя) L, состоящей из витков, намотанных на стальной сердечник.
Индуктивное или реактивное сопротивление обмотки дросселя как ее принято называть, силовая, рабочая нагрузочная обмотка определяется ее параметрами и магнитным состоянием сердечника, на котором она намотана.
Сердечник дросселя характеризуется двумя крайними магнитными состояниями: при котором индуктивное сопротивление дросселя близко к нулю (равноценно сопротивлению обмотки без сердечника) и при котором индуктивное сопротивление дросселя максимально (наличие сердечника).
Промежуточные режимы соответствуют как бы изменяемому сечению сердечника. Изменение сечения сердечника практически осуществить нельзя. Однако этот же эффект может быть достигнут путем пропускания постоянного тока по добавочной обмотке, намотанной на том же сердечнике и называемой обмоткой управления wy. Этот ток подмагничивания называется током управления.
Промежуточные значения рабочего тока можно получить, изменяя величину постоянного тока в обмотке управления.
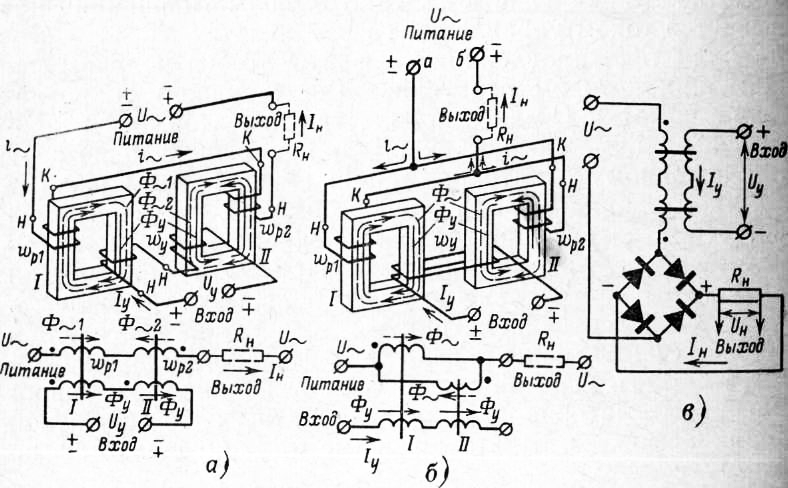
Отличительным признаком схемы промышленного магнитного усилителя является наличие двух рабочих обмоток, включенных встречно. Это связано с необходимостью предотвращения попадания в обмотку управления трансформаторной э. д. е., наводимой рабочими обмотками. В результате встречного включения рабочих обмоток в обмотке управления трансформаторная э. д. с. не наводится.
Нагрузочные обмотки включаются последовательно-встречно или параллельно-встречно. Обмотки управления, как правило, соединяются последовательно-согласно и обычно представляют собой единую обмотку, охватывающую оба сердечника.
Основная характеристика представляет собой зависимость тока нагрузки (выхода) от тока управления /н=/(/у) и называется зависимостью «вход — выход» (внешней характеристикой). Ток нагрузки для каждой точки характеристики определяется выражением. Внешняя характеристика МУ симметрична относительно оси ординат при токах управления разных полярностей. Это означает, что работа такого протекает совершенно одинаково независимо от направления подмагничивания сердечника потоком, т. е. независимо от изменения полярности сигнала управления.
Следует отметить, что магнитный усилитель может иметь не одну, а несколько управляющих обмоток, включенных в схему управления главными электроприводами, и направления токов в них могут быть различными. В таком случае одни обмотки управления могут создавать магнитные потоки одного направления, допустим будут подмагничивать сердечник, а другие обмотки (с противоположной полярностью) будут создавать магнитные потоки другого направления, встречно предыдущим, т. е. будут размагничивать сердечники. Следовательно, создаваемые обмотками управления магнитные потоки будут как намагничивающими, так и размагничивающими сердечники усилителя и тогда ток его нагрузки в конечном итоге определится алгебраической суммой ампер-витков (намагничивающая сила) всех обмоток управления, т. е. результирующей н. с.
При необходимости питания нагрузки постоянным током ее включают через выпрямительный мост, получая с выходом на постоянном токе. Внешняя характеристика при этом остается такой же, как и с выходом на переменном токе.
Изменение направления тока в обмотке управления не вызывает изменения направления тока в нагрузке, т. е. простейший усилитель является однотактным (нереверсивным), что является одним из самых крупных недостатков МУ. Кроме того, простейший МУ имеет недостаточный коэффициент усиления.
Магнитные усилители, собранные по схеме с самонасыщением, имеют коэффициент усиления значительно выше, что позволило именно им найти самое широкое применение. Это обусловлено тем, что в процессе изменения магнитного состояния сердечника участвует не только ток обмотки управления, но и ток рабочей обмотки, что равносильно эквивалентному увеличению тока управления в 8—10 раз.
Для лучшего понимания работы с самонасыщением сравним схемы, показанные на рис. 9,6 и в. В первом случае вентиль отсутствует, ток через амперметр А весьма мал и определяется величинами xL и Дн-Включение вентиля В, пропускающего ток лишь одну половину периода, допустим верхние полуволны тока (однополупериодное выпрямление рабочего тока), вызывает появление пульсирующего тока с постоянной составляющей, которая создает дополнительное подмагни-чивание сердечника (самоподмагничивание); переменная же составляющая пульсирующего тока по-прежнему играет роль рабочего тока в усилителе.
Рабочей частью является правая, более крутая часть характеристики.
Необходимо остановиться на цепи смещения.
Пропуская по обмотке wсм постоянный ток /см (от источника постоянного тока либо от сети переменного тока через выпрямители), создают постоянное подмаг-ничивающее поле ФСм одного направления (начальное подмагничивание), независимое от потока Фу обмотки управления. Выбирая полярность и величину тока в обмотке wсм, можно внешнюю характеристику МУ перемещать вдоль горизонтальной оси в любом направлении. Для самонасыщающихся МУ полярности обмотки смещения выбирают таким образом, чтобы создаваемое поле было направлено навстречу полю самоподмагничивания и, следовательно, снижало величину тока /о усилителя. Характеристика при этом как бы смещается вправо, а величина начального тока /<> уменьшается. Обычно начальную рабочую точку усилителя устанавливают так, чтобы она лежала примерно посредине рабочей части его характеристики.
Рассмотренные однофазные нереверсивные (одно-тактные) МУ применяются только в маломощных цепях.
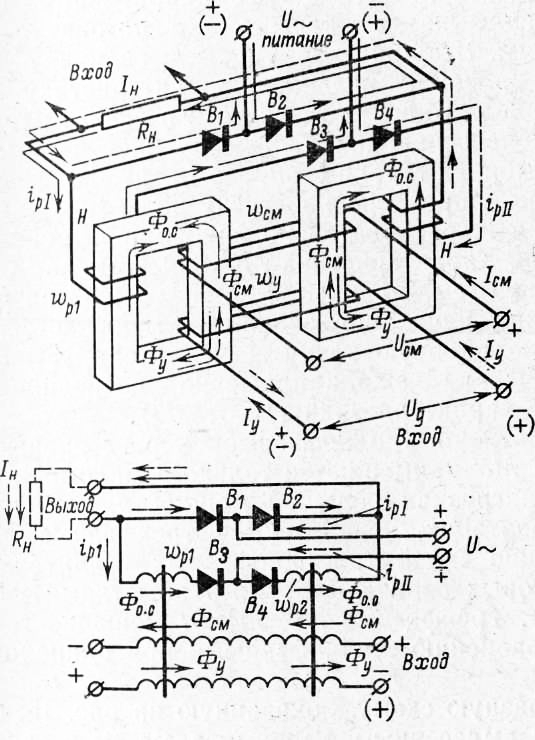
При нагрузках большой мощности, имеющих место на экскаваторах, используются трехфазные МУ, представляющие собой три однофазных усилителя, сердечники которых охвачены общими обмотками управления. Трехфазные МУ имеют меньшие габариты и вес по сравнению с однофазными при одинаковой мощности.
Трехфазную схему, показанную на рис. 11, называют схемой с вынесенным выпрямителем В4 в связи с тем, что в ней одна группа выпрямителей В2 служит только для создания внутренней обратной положительной связи (потока самоподмагничивания Ф0.с), другая (в мосте Ларионова) —для выпрямления (в МУ, изображенном на рис. 10, одни и те же выпрямители одновременно выполняют обе эти функции). Такие усилители используются при индуктивном характере нагрузки. В схеме на рис. 11 устраняется влияние индуктивности нагрузки на работу МУ вследствие замыкания паразитных токов через выпрямительные мосты без протекания их по обмоткам МУ.
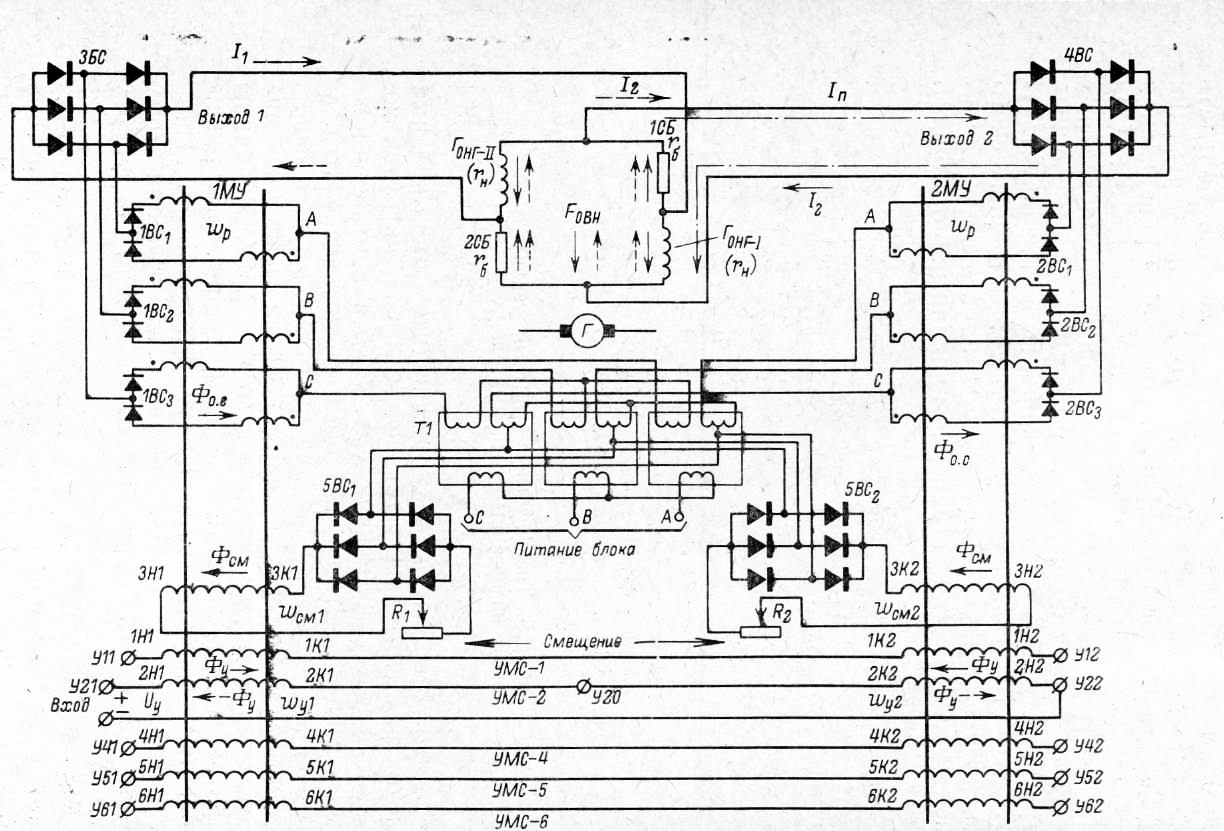
Для реверсивного управления главными электроприводами экскаватора Э-2503, когда требуется получать изменения направления рабочего тока при переменах полярности входного сигнала, используется реверсивная (двухтактная) схема включения МУ (рис. 12). Она представляет собой комбинацию из двух однотактных трехфазных, подобных на рис. 11, включенных встречно. Поэтому и внешняя характеристика двухтактного усилителя является результатом алгебраического суммирования характеристик однотактных усилителей. Для устранения влияния работы одного на другой питание их производится от отдельных обмоток разделительных трансформаторов, нагрузка же их включена по мостовой схеме. Двумя противоположными плечами моста служит обмотка независимого возбуждения, разделенная на две части, двумя другими — балластные резисторы. К диагоналям моста подключены выходы магнитных усилителей. Величины сопротивлений балластных резисторов примерно равны величинам сопротивлений полуобмоток возбуждения, т. е. мост получается уравновешенным. Благодаря этому работа одного практически не влияет на работу другого.
Если подмагнитить второй усилитель и одновременно размагнитить, то результирующая н. с. уже будет направлена в другую сторону и результирующий ток в этом случае будет определяться в левой части графика на рис. 12. Таким образом, получается реверсирование тока (а значит, и магнитного поля) на выходе двухтактного (реверсивного) усилителя.
Указанная система подмагничивания одного усилителя и одновременного размагничивания другого достигается встречно-последовательным включен и ем обмоток управления однотактных усилителей. Обмотки смещения, которые хотя и питаются от отдельных источников тока, получаются как бы включенными согласно и последовательно. С их помощью выбирают рабочую точку А по-прежнему на середине статической характеристики каждого усилителя.
Рекламные предложения:
Главная → Справочник → Статьи → Форум
Механизация земляных работ
Механизация строительства
Механизация дорожных работ
Автоматизация строительства
→ Бетонные работы
→ Мини-тракторы
 Разделы
Разделы
Строительные машины и оборудование
→ Для специальных земляных работ
→ Дорожно-строительные машины
→ Строительное оборудование
→ Асфальтоукладчики и катки
→ Большегрузные машины
→ Строительные машины, часть 2,
→ Дорожные машины, часть 2
→ Ремонтные машины
→ Ковшовые машины
→ Автогрейдеры
→ Экскаваторы
→ Бульдозеры
→ Скреперы
→ Грейдеры
Эксплуатация строительных машин
→ Эксплуатация средств механизации
→ Эксплуатация погрузочных машин
→ Эксплуатация паровых машин
→ Эксплуатация экскаваторов
→ Эксплуатация подъемников
→ Эксплуатация кранов перегружателей
→ Эксплуатация кузовов машин
→ Крановщикам и стропальщикам
Ремонт строительных машин
Ремонт дорожных машин
Ремонт лесозаготовительных машин
Ремонт автомобилей КАмаЗ
Техническое обслуживание автомобилей
Очистка автомобилей при ремонте
Материалы и шины
Остались вопросы по теме:
"Основные элементы системы г—д"
— воспользуйтесь поиском.
→ Машины городского хозяйства
→ Естественная история машин
→ Транспортная психология
→ Пожарные автомобили
→ Автомобили-рефрижераторы
→ Монтаж и эксплуатация лифтов
→ Тракторы