Строй-Техника.ру
Строительные машины и оборудование, справочник
Грузовые подъемные установки характеризуются циклическим режимом работы. Для грузолюдских подъемных установок характерна, кроме того, необходимость различного рода маневровых операций.
Цикл подъема состоит из трех основных периодов: разгона, равномерного хода и замедления.
Для обеспечения необходимой точности остановки сосудов в положении разгрузки период замедления разбивают на три периода:
1) период замедления, в течение которого скорость привода уменьшается от максимального значения и до малой скорости, безопасной для соприкосновения подъемного сосуда с разгрузочными кривыми или педалью загрузочного устройства;
2) период «дотягивания» — движения с малой скоростью, в течение которого компенсируется неточность движения в период замедления и обеспечивается подход к месту стопорения с малой безопасной скоростью;
3) период стопорения, когда производится остановка подъемных сосудов и наложение рабочего тормоза. Период разгона в ряде случаев также разбивают на два периода: период движения в разгрузочных кривых, в течение которого скорость привода ограничивается значением допустимой скорости движения в разгрузочных кривых, и период разгона, когда скорость привода возрастает до максимального значения. На установках с опрокидными сосудами скорость движения сосудов в разгрузочных кривых ограничивается технологическими требованиями.
Рекламные предложения на основе ваших интересов:
Дополнительные материалы по теме:
На рис. 1 показаны типовые тахограммы и диаграммы усилий скиповых и клетевых подъемных установок.
Диаграмма движущих усилий уравновешенной подъемной установки с неопрокидными скипами характеризуется тормозным режимом замедления и двигательным режимом в период дотягивания. Диаграмма движущих усилий неуравновешенной двух-концевой подъемной установки с опрокидными сосудами характеризуется дополнительной неуравновешенностью системы в период дотягивания при разгрузке сосуда. В период дотягивания в этом случае в начале движения сосуда в разгрузочных кривых требуется двигательный режим, а по мере высыпания груза — тормозной.
Диаграмма усилий клетевой подъемной установки при подъеме гРуза одноэтажной клетью, работающей на один горизонт, характеризуется в начале и конце цикла экстренными Усилиями, связанными с переподъемом клети над кулаками при нижней клети, стоящей на брусьях.
При многоэтажных клетях и при работе на несколько горизонтов диаграммы движущих усилий клетевых подъемных установок обусловливаются маневрами на верхней приемной площадке и горизонтах.
При спуске груза клетевым подъемом движущие усилия обычно отрицательны во все периоды цикла.
На скиповых подъемных установках, осуществляющих преимущественно подъем груза с одного горизонта, в период замедления, в зависимости от величины концевой нагрузки и параметров подъемной установки, привод может работать в одном из режимов: тормозном, свободного выбега или двигательного замедления. При перегоне порожних сосудов всегда требуется работа привода в тормозном режиме. Двигательный режим замед- : ления, присущий небольшому числу подъемных установок, в большинстве случаев может быть приведен к режиму свободного выбега, если принять более высокие значения ускорений.
В периоды дотягивания, в зависимости от конструкции грузовых сосудов (скипы с донной разгрузкой, опрокидные скипы, опрокидные клети) и конструкции разгрузочных кривых, возможны двигательный или тормозной режимы, а при опрокидных сосудах, ввиду” изменения знака и величины нагрузки во время высыпания груза, режим работы привода изменяется с двигательного на тормозной.
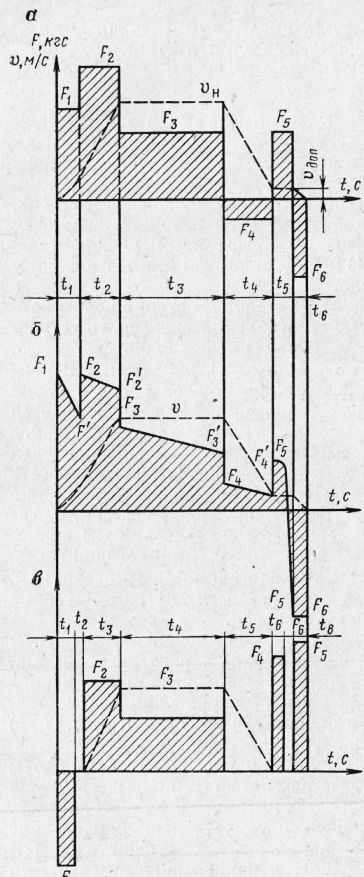
Рис. 1. Типовые тахограммы и диаграммы усилий
Диаграммы скорости клетевых подъемных установок более сложны, так как при подходе клети к местам загрузки требуется выполнение сложных маневров, а при разъездах между ближайшими горизонтами и транспортировке различных грузов — движение с пониженной скоростью.
Исходя из режимов работы подъемных установок, к электроприводу подъемных машин, предназначенных для работы как при ручном так и при автоматическом управлении, предъявляются следующие основные требования:
1) точное выполнение заданной диаграммы скорости независимо от величины нагрузки, изменяющейся в пределах 0—120% номинальной статической нагрузки подъемного двигателя для грузовых подъемных установок и ±100% для клетевых подъемных установок;
2) возможность работы в период замедления в тормозном режиме или режиме свободного выбега. Величина тормозного момента должна регулироваться в заданных пределах;
3) возможность получения устойчивой, независимой от величины и знака нагрузки малой скорости дотягивания (0,3—0,5 м/с);
4) возможность осуществления малой скорости (0,5—1,0 м/с) при ревизии канатов и ствола.
Очевидно, что выполнение указанных выше требований возможно только в том случае, если электропривод обладает хорошей управляемостью, высокими регулировочными свойствами и стабильностью работы как в двигательном, так и тормозном режимах.
Для привода подъемных машин применяют асинхронный электропривод переменного тока и электропривод постоянного тока.
Рекламные предложения:
Главная → Справочник → Статьи → Форум
Механизация земляных работ
Механизация строительства
Механизация дорожных работ
Автоматизация строительства
→ Бетонные работы
→ Мини-тракторы
 Разделы
Разделы
Строительные машины и оборудование
→ Для специальных земляных работ
→ Дорожно-строительные машины
→ Строительное оборудование
→ Асфальтоукладчики и катки
→ Большегрузные машины
→ Строительные машины, часть 2,
→ Дорожные машины, часть 2
→ Ремонтные машины
→ Ковшовые машины
→ Автогрейдеры
→ Экскаваторы
→ Бульдозеры
→ Скреперы
→ Грейдеры
Эксплуатация строительных машин
→ Эксплуатация средств механизации
→ Эксплуатация погрузочных машин
→ Эксплуатация паровых машин
→ Эксплуатация экскаваторов
→ Эксплуатация подъемников
→ Эксплуатация кранов перегружателей
→ Эксплуатация кузовов машин
→ Крановщикам и стропальщикам
Ремонт строительных машин
Ремонт дорожных машин
Ремонт лесозаготовительных машин
Ремонт автомобилей КАмаЗ
Техническое обслуживание автомобилей
Очистка автомобилей при ремонте
Материалы и шины
Остались вопросы по теме:
"Режимы работы подъемных установок и требования к электроприводу"
— воспользуйтесь поиском.
→ Машины городского хозяйства
→ Естественная история машин
→ Транспортная психология
→ Пожарные автомобили
→ Автомобили-рефрижераторы
→ Монтаж и эксплуатация лифтов
→ Тракторы