Строй-Техника.ру
Строительные машины и оборудование, справочник
Вопросам рационального управления подъемно-транспортными машинами уделяется большое внимание, так как система управления оказывает существенное влияние и на производительность машины, на ее долговечность, и на условия работы обслуживающего персонала.
В большинстве случаев управление кранами производится из кабин управления, прикрепленных к металлоконструкции крана или тележки. В зависимости от типа, назначения и условий работы крана конструктивное выполнение кабин может быть различным — от самых элементарных до весьма сложных. Конструкция кабины управления и пульта управления, обзор поля действия оказывают существенное влияние на производительность крана и на работоспособность крановщика.
На кранах небольшой грузоподъемности, работающих с невысокими скоростями и в ненапряженном режиме, в помещении с чистым воздухом и нормальной температурой можно ограничиться весьма простой открытой кабиной. Для кранов, работающих на открытом воздухе, а также в загазованных цехах и в цехах с повышенной температурой, применяются закрытые кабины, снабженные устройствами для отопления и вентиляции, а иногда и герметические кабины, оборудованные установками для кондиционирования воздуха, обеспечивающими постоянство температуры воздуха внутри кабины в пределах от +22 до +26 °С при температуре окружающей среды, изменяющейся до +75 °С.
Рекламные предложения на основе ваших интересов:
Дополнительные материалы по теме:
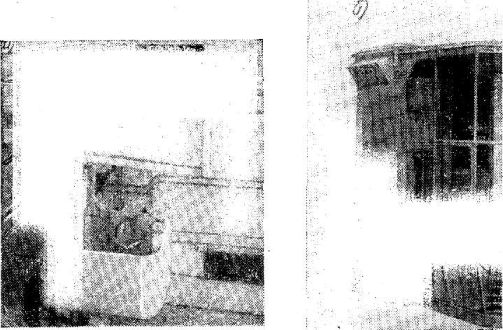
Рис. 1. Кабины управления кранами:
а — открытая; б — закрытая
Высота кабины должна быть не менее 1,8 м при работе в ней стоя и не менее 1,5 м при работе сидя. Площадь пола кабины, согласно требованиям института гигиены труда и профзаболеваний и органов охраны труда, для рационального размещения кресла крановщика и электрооборудования и для улучшения условий труда, должна быть не менее 2 м2. Расположение кабины на кране, а также ее остекление и расположение аппаратов управления должно быть таким, чтобы с места управления можно было бы наблюдать за грузозахватным органом и грузом в течение всего цикла работы машины.
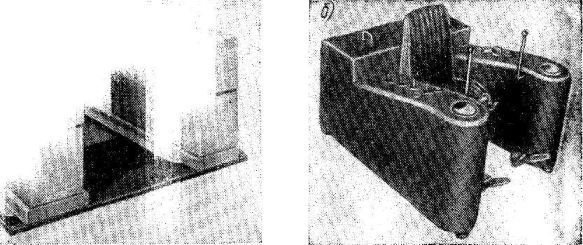
Рис. 2. Пульты управления
Пульты управления, обеспечивающие комфортабельное положение крановщика, представлены на рис. 2. Рычаги командоконтроллеров управления механизмами подъема и передвижения тележки расположены соответственно в правом и левом подлокотниках кресла. Педаль рычага командоконтроллера движения моста находится на полу и управляется правой ногой, т. е. для каждой руки и ноги крановщика предусмотрена только одна определенная операция, что уменьшает утомляемость крановщика и делает управление механизации более четким и безошибочным. На электрических кранах мостового типа и на консольных кранах кабины располагаются под металлоконструкцией моста и соединяются с ней лестницей. На башенных кранах предусматриваются выносные кабины, прикрепляемые к башне крана.
Необходимость повышения производительности подъемно-транспортных машин, улучшения условий работы обслуживающего персонала, повышения надежности и долговечности работы элементов
машины обусловили создание новых, более совершенных систем управления машинами и частичной или полной автоматизации их работы. Подача сигналов крановщику голосом или условными знаками недостаточно надежны, особенно в производствах, где шум, дым, пар или пыль мешают наблюдению.
В ряде случаев, например при монтажных работах с крупногабаритными изделиями, а также при разгрузке трюмов судов, из кабины крана нельзя видеть положение крюка и груза, а связь между крановщиком и рабочим, находящимися в непосредственной близости от груза, затруднена. В металлургическом производстве, при работе со взрывоопасными материалами, а также при работе с веществами, выделяющими вредные для здоровья человека газы, пары или ради-активные излучения, нельзя находиться около груза.
Одним из средств улучшения управления грузоподъемными машинами является передача сигналов по телефону или по радио. В этом случае возможность ошибки резко снижается, а точность проведения работ увеличивается. Развитие радиоэлектронной техники привело к созданию дистанционного управления механизмами кранов. В этом случае широко применяется так называемое управление с пола, когда механизмами крана управляют с пульта управления, расположенного в отдалении от крана.
Пульт управления может быть стационарным или переносным. Применение переносного пульта дистанционного управления повышает точность монтажно-сборочных и перегрузочных работ, так как обслуживающий персонал может находиться в непосредственной близости от транспортируемого объекта. Современная полупроводниковая аппаратура позволяет создать весьма легкие и портативные переносные пульты управления, не затрудняющие оператора при его перемещении. Дистанционное управление является также необходимым и в тех случаях, когда по условиям работы обслуживающий персонал должен находиться в отдалении от транспортируемого груза. При дистанционном управлении становится возможным осуществление управления одним оператором несколькими машинами с одного пульта управления.
Дистанционное управление осуществляется либо при помощи пульта управления, соединенного с машиной проводами, либо при помощи радиосигналов. Первый способ находит более широкое применение, так как он обеспечивает повышенную надежность, и при применении переменного тока звуковой частоты позволяет передавать по одним и тем же проводам сигналы различной частоты к различным исполнительным механизмам. В диапазоне от 200 до 10 000 гц по одному проводу можно передавать сигналы примерно на 20 частотах без взаимного влияния сигналов и появления помех. При необходимости в большем удалении пульта управления от места работы, а также при перемещении машины на значительные расстояния, когда применение системы проводов становится неудобным, применяется беспроволочное управление механизмами при помощи радио, при котором командоаппаратом на вход радиопередатчика подаются команды в виде комбинаций импульсов тональной частоты.
Радиопередатчик преобразует импульсы тональной частоты в импульсы радиочастоты и передает их по радиоканалу. Радиоприемник принимает эти сигналы, преобразует их в сигналы тональной частоты, усиливает и подает на вход приемника телеуправления. В приемнике телеуправления сигналы тональной частоты выделяются соответствующими полосовыми фильтрами, детектируются и заставляют срабатывать соответствующее приемное реле. Контакты этих реле управляют
схемой дешифратора. Дешифратор расшифровывает команды и при этом срабатывает одно из реле, управляющих работой электропривода магнитных станций.
Радиоаппаратура для управления работой кранов на расстоянии состоит из пульта управления весом примерно 3 кГ (рис. 299), легко переносимого человеком, и приемной аппаратуры, установленной на кране. Пульт управления состоит из передатчика и блока генераторов командных частот с коман-доаппаратом. Каждому механизму крана соответствует определенная рукоятка на пульте управления. Так, перемещение рукоятки 7 вверх или вниз приводит к включению механизма подъема соответственно на подъем или спуск груза. Рукоятка 2 управляет движением моста крана; рукоятка 4 — движением тележки; рукоятка 5 — включением подъемного электромагнита. При нажатии кнопки 6 включается
сигнальный звонок на кране; выключение тумблера 3 приводит к обесточиванию всего крана. Разработанная система управления дает возможность регулирования скорости двигателей механизмов. В последних моделях пульта управления антенна 1 передатчика закладывается в лямки прибора, что делает передвижение оператора еще более свободным. При управлении по радио весьма удобным является применение телевизионных камер, значительно расширяющих поле зрения, так как по экрану телевизора можно наблюдать за перемещением груза.
Автоматизация многих отраслей промышленности требует обязательного осуществления автоматического управления подъемно-транспортными машинами, В основном автоматизация идет по линии автоматизации управления электроприводом и междуагрегатным транспортом. В настоящее время в ряде научно-исследовательских институтов (например, в институте автоматики и телемеханики АН СССР, ВНИИПТМАШе и др.) и заводов страны проводятся исследования автоматической следящей системы регулирования скорости различных механизмов подъемно-транспортных машин, схем автоматического торможения, ведутся работы по созданию автоматических устройств, повышающих безопасность работы кранов — ограничителей грузоподъемности и путей перемещения, противоугонных устройств и т. п., а также работы по совершенствованию телеуправления и автоматического адресования грузов и по созданию автоматических грузозахватных приспособлений.
Рис. 3. Пульт управления работой крана по радио
Степень автоматизации работы подъемно-транспортной машины может быть весьма различной. Для грузоподъемных машин она большей частью ограничивается автоматизацией выполнения отдельных операций их работы. Так, например, широко автоматизируются процессы разгона и торможения механизмов, процессы регулирования скоростей движения, уменьшения скорости движения перед остановкой, а также остановка машин в определенном заданном месте. Необходимо отметить, что без обеспечения автоматизации процессов разгона и торможения, а также регулирования скорости практически невозможно осуществить и дистанционное управление подъемно-транспортными машинами.
Даже автоматизация некоторых процессов работы грузоподъемной машины приводит к значительному повышению ее производительности, так как плавное автоматическое уменьшение скорости перед остановкой и обеспечение точной посадки груза позволяет в несколько раз увеличить скорость перемещения груза и пустого крюка, что приводит к уменьшению необходимого числа грузоподъемных машин, уменьшению количества обслуживающего персонала, повышению срока службы машины, облегчению труда рабочих.
Полная автоматизация работы подъемно-транспортной машины, требующая строгой ритмичности работы всего производства, хоро-щей организации рабочих мест и особой четкости ведения работы, осуществляется при автоматизации всего технологического процесса, составной частью которого является работа данной подъемно-транспортной машины. В этом случае широко применяются различные типы машин непрерывного транспорта, различные устройства для загрузки и разгрузки тележек, конвейеров, станков и т. п. Загрузка и разгрузка нескольких линий транспортеров, загрузка и разгрузка бункерных устройств и т. д. может производиться почти без участия человека.
Обслуживающий персонал осуществляет лишь наблюдение за работой системы.
Возможно применение полностью автоматизированной работы грузоподъемной машины отдельно без наличия автоматизации всего технологического процесса. Так, например, уже осуществляют полностью автоматизированную работу перегрузочных мостов; грейферных кранов, работающих по перегрузке сыпучих грузов, прибывающих на баржах; пассажирских и грузовых лифтов, работающих по определенному графику и т. п.
Автоматизация работы пассажирских лифтов открывает большие возможности повышения их производительности. Для этого используют так называемое собирательное управление одним или группой лифтов, сосредоточенных в одном здании, при котором собирают и регистрируют все распоряжения, поступающие от вызывных кнопок. Система автоматического управления автоматически распределяет все поступившие вызовы между всеми лифтами и выполняет их в наиболее рациональной последовательности, а после выполнения этих распоряжений лифты автоматически возвращаются на место основной стоянки.
Такое управление позволяет получить выигрыш во времени более чем в два раза, по сравнению с обычной системой одиночных вызовов. В часы наибольшей загрузки лифтов можно обеспечить их автоматическую работу по заданной программе; при этом некоторые лифты обслуживают определенные зоны и часть пути проходят без остановки. Система автоматического управления лифтами может включать в себя также грузовой индикатор, связанный с настилом пола кабины. В этом случае лифт начинает движение, если кабина загружена не менее чем на 80% номинальной грузоподъемности. Если же нагрузка меньше этой величины, то лифт включается только по истечении определенного отрезка времени.
В ряде случаев возможна автоматическая работа подъемно-транспортных машин, управляемых счетно-решающими устройствами. Необходимо иметь в виду, что автоматизация процесса работы подъемно-транспортных машин и осуществление дистанционного управления ими требует повышения надежности работы различных предохранительных устройств (конечных выключателей, устройств, ограничивающих грузоподъемность, и т. п.).
Программное управление, т. е. автоматическая работа машины по заданной программе, необходимо в случаях, когда из-за вредности производства (наличие газов, пыли, радиактивных веществ, высокой температуры и т. д.) недопустимо пребывание человека вблизи различных машин и аппаратов, осуществляющих технологический процесс, а также там, где напряженность производственного цикла настолько велика, что не может контролироваться непосредственно человеком.
Для осуществления программного управления применимы различные способы. Простейшим из способов программного управления является введение программы путем установки электромеханических включателей, действующих поочередно по мере выполнения тех или иных технологических операций. В ряде случаев этот способ может быть дополнен применением задатчика программы — автоматического ко-мандо аппарата, действующего в функции времени. Этот способ программирования удобен и надежен, если не приходится часто менять программу работы и не меняются резко условия работы.
Если же условия работы и программа должны меняться, то этот способ программирования оказывается недостаточно совершенным, даже для осуществления полуавтоматической работы. Например, трудно осуществить программную работу портальных кранов с механизмами поворота, работа которых зависит от силы и направления ветра, состояния тормозов и т. д. В большинстве случаев не удается обойтись без серьезного усложнения схемы, без введения различного рода обратных связей и следящих систем.
Другим способом программирования является задание программы записью на магнитную ленту. Наряду с некоторыми преимуществами, к которым относятся простота перестройки программы, возможность записи и передачи командного кода по одной физической линии и по радио и т. д., эта система в простейшем виде не лишена недостатков. Например, появляется нарастающая ошибка, которую необходимо корректировать при помощи обратной связи (корректировка по пути, в функции выполнения технологических операций, непрерывная корректировка при помощи специальных устройств и т. д.).
Способ задания программы перфокартами целесообразен, если могут быть заданы типичные программы работы, не требующие корректировки. Важное значение при использовании перфокарт имеет способ считывания информации, которую несут перфокарты. Применительно к подъемно-транспортным машинам могут быть использованы как механические способы считывания, так и электромеханические (путевые переключатели), индуктивные (использующие изменение магнитного сопротивления) и фотоэлектрические.
Электрические и фотоэлектрические способы программирования являются наиболее прогрессивными, так как они позволяют записать большое число различных сигналов при небольших размерах перфокарт и считывающих устройств и используют современные технические средства. Перевод крана на автоматическую работу по заданной программе целесообразен тогда, когда кран выполняет ряд следующих друг за другом операций, например, если кран выполняет работу поу перегрузке сыпучих грузов, работает по завалке мартеновских печей, подаче штучных грузов из цеха на склад или со склада на погрузку.
Введение программного управления приводит к увеличению производительности как самого крана, так и обслуживаемого им участка, улучшает условия работы механизмов и электрооборудования кранов, позволяет уменьшить число рабочих. Все это дает определенный технико-экономический эффект. Программа работы крана составляется с учетом требований технологического процесса и должна обеспечить достаточно длительный период работы без вмешательства человека.
Задача выбора программы сводится к разбивке всей программы технологического цикла на ряд отдельных программ, выполняемых последовательно одна за другой. Отдельная программа выполняется автоматически после подачи соответствующего пускового импульса. Затем кран останавливается и оператор должен задать новую программу и дать новый пусковой импульс. Программа должна задаваться не только в функции времени, так как при длительном периоде работы происходит неизбежное накопление ошибок в пути тележки и моста, особенно в периоды их неустановившегося движения. Поэтому программа должна содержать в себе и определенные задания положения рабочих элементов крана. Можно программировать работу и отдельных механизмов кранов и других подъемно-транспортных машин.
В этом случае предусматривается лишь частичное программирование работы машины.
Все более широкое применение находит автоматическое адресование транспортируемых грузов, т. е. отправка грузов на заданное место, автоматически выполняемое при помощи электрических или электромеханических устройств. Автоматическое адресование значительно уменьшает число рабочих, занятых на транспортировке, и ускоряет процесс доставки груза к месту назначения. Наиболее часто автоматическое адресование используется при применении подвесных цепных конвейеров толкающего типа.
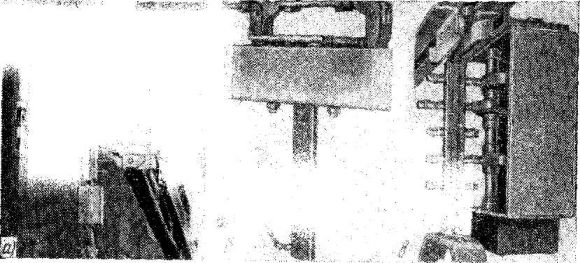
Рис. 4. Система адресования переставными штифтами:
а — подвеска тележки с адресоносителем; б — установка штифтов вручную; в — автоматическая установка штифтов кулачками
Применяются две принципиально различные схемы адресования. В первой системе подача сигнала на перевод той или иной стрелки производится с центрального пульта при помощи следящего устройства. В этом случае каждая тележка, выходящая на приводной участок пути, при прохождении контрольного пункта отмечается, и при дальнейшем ее движении в соответствии с заданной программой следящее устройство готовит путь для этой тележки. Сама тележка при этом не несет на себе никаких адресующих устройств.
Во второй системе маршрут следования тележки закладывается в кодированном виде в адресующее устройство, смонтированное на тележке. В этом случае тележка сама подготавливает себе путь. Естественно, что на сложных трассах возможно совмещение обеих схем адресования. Выбор системы автоматического адресования тесно связан с организацией производства в целом и методом его управления. В настоящее время наибольшее применение имеет вторая система адресования.
В простейшей электромеханической контактной системе автоматического адресования подвеска грузовой тележки имеет горизонтальную или вертикальную траверсу (адресоноситель) с отверстиями, в которые в определенном порядке вручную вставляются штифты или автоматически выдвигаются при помощи адресователя. При наличии адресователей у рабочего места устанавливается отдельный пульт с кнопками, число которых соответствует числу адресов, куда направляются грузы с данного рабочего места. При нажатии на кнопку штифты автоматически, при помощи системы электромагнитов и кулачков, устанавливаются в нужное положение. Эти штифты в определенном месте движения тележки воздействуют на соответствующие кулачки выключателей приемного («считывающего») устройства, управляющего приводом путевой стрелки.
Комбинация положения штифтов на траверзе тележки и конечных выключателей у стрелки обеспечивает каждой тележке с грузом определенный адрес перемещения. Обычно комбинации составляются из одного, двух, трех и четырех штифтов при их общем количестве в 4—12 шт. Так, например, комбинация двух штифтов из десяти дает 45 адресов. При большом количестве стрелок устройство данного типа получается сложным и недостаточно надежным.
Наиболее рациональной системой автоматического адресования является способ с применением в качестве носителя информации перфокарты, а в качестве элемента считывания — фотосопротивления. На перфокарте при помощи отверстий или создания выпуклостей записаны команды. Каждый пункт остановки или перевода стрелок имеет свой собственный адрес, на который настраивается считывающее устройство. Если мимо проходит тележка с перфокартой, на которой записан адрес этого пункта, то срабатывает соответствующая аппаратура и направляет тележку в требуемом направлении, осуществляя остановку или другие операции.
Перфокарта изготовляется из картона, пластмассы или из металлического листа толщиной 0,8—1,0 мм с износостойким покрытием с рабочей стороны. Размеры перфокарты зависят от общего числа команд, количества операций, числа пунктов остановки и т. п., а также от величины отверстий, пробиваемых на перфокарте. Система автоматического адресования легко увязывается с автоматическим учетом числа деталей, узлов, тележек и готовых изделий, для чего применяются электронные быстродействующие регистрирующие и счетно-регистрирующие устройства. Результаты учета оформляются буквопечатающими аппаратами и различными счетчиками.
При работе башенных строительных кранов, основным назначением которых при монтаже полносборных зданий является не только подача конструкций к месту установки, но и точная их установка, применяется комбинированная система управления, объединяющая в себе два устройства: для управления краном по заранее заданной программе и для дистанционного управления краном — программно-дистанционное управление. При этой системе операции по доставке деталей со склада (или непосредственно с транспортных средств) на здание осуществляются автоматически посредством системы адресования и программного управления двигателями, а точное позиционирование обеспечивается управлением по радио на малых (ползучих) скоростях подъема и опускания груза.
Рекламные предложения:
Главная → Справочник → Статьи → Форум
Механизация земляных работ
Механизация строительства
Механизация дорожных работ
Автоматизация строительства
→ Бетонные работы
→ Мини-тракторы
 Разделы
Разделы
Строительные машины и оборудование
→ Для специальных земляных работ
→ Дорожно-строительные машины
→ Строительное оборудование
→ Асфальтоукладчики и катки
→ Большегрузные машины
→ Строительные машины, часть 2,
→ Дорожные машины, часть 2
→ Ремонтные машины
→ Ковшовые машины
→ Автогрейдеры
→ Экскаваторы
→ Бульдозеры
→ Скреперы
→ Грейдеры
Эксплуатация строительных машин
→ Эксплуатация средств механизации
→ Эксплуатация погрузочных машин
→ Эксплуатация паровых машин
→ Эксплуатация экскаваторов
→ Эксплуатация подъемников
→ Эксплуатация кранов перегружателей
→ Эксплуатация кузовов машин
→ Крановщикам и стропальщикам
Ремонт строительных машин
Ремонт дорожных машин
Ремонт лесозаготовительных машин
Ремонт автомобилей КАмаЗ
Техническое обслуживание автомобилей
Очистка автомобилей при ремонте
Материалы и шины
Остались вопросы по теме:
"Управление работой подъемно-транспортных машин"
— воспользуйтесь поиском.
→ Машины городского хозяйства
→ Естественная история машин
→ Транспортная психология
→ Пожарные автомобили
→ Автомобили-рефрижераторы
→ Монтаж и эксплуатация лифтов
→ Тракторы