Строй-Техника.ру
Строительные машины и оборудование, справочник
Автоматизацию застропки и отстропки среднетоннажных контейнеров обеспечивают автостропы ЦНИИ—ХИИТ, а крупнотоннажных контейнеров — автоматические спредеры. В последние годы все шире применяют дистанционное управление погрузочно-разгрузочными машинами при переработке контейнеров. Это позволяет повысить производительность труда и сократить обслуживающий машины персонал. Дистанционное управление может быть косвенным, телемеханическим или по радио. При косвенном управлении команды передаются на кран с переносного пульта по многопроводному кабелю. Для включения и выключения электродвигателей его механизмов служат реле слабого тока, которые связаны с переносным пультом.
Для каждой команды, реализуемой машиной, требуется отдельный привод, поэтому кабели управления получаются многожильными и тяжелыми, перемещение их во время работы затруднительно.
При телемеханическом дистанционном управлении команды передаются кодами по ограниченному числу проводов. Коды отличаются частотой и фазой. В приемном устройстве они расшифровываются и преобразовываются в управляющие сигналы исполнительным механизмом. По сравнению с косвенным управлением в этом случае требуются кабели с меньшим числом жил, меньше габариты и масса командоаппаратов, выше их надежность работы. Однако, если число команд большое, резко усложняется приемно-передающая аппаратура и замедляется процесс управления краном. При радиоуправлении команды на кран, где установлена приемная радиостанция, передает оператор при помощи переносного радиопередатчика. В Институте автоматики и телемеханики АН СССР разработана система радиоуправления кранами с переда- J чей импульсов через приемник на двух частотах с разностью в 60 Гц.Ц На выходе приемника импульсы проходят через канальные раздели-Я тели и поступают на промежуточные реле бесконтактной циклической Я системы управления краном. Радиооборудование выполнено на пе-ч| чатных схемах по блочному принципу. Масса радиоприемника 40 кг, а радиопередатчика 2…2,5 кг. Срок службы аккумуляторных батарей при трехсменной работе 30 сут. Радиус действия радиопередатчика 60 м.
Рекламные предложения на основе ваших интересов:
Дополнительные материалы по теме:
В зависимости от воздействия на исполнительные органы механизмов кранов системы управления бывают ручные, полуавтоматические и автоматические.
При ручном управлении отдельные движения механизмов крана выполняются командоконтроллером. Одновременно с перемещением контейнера координаты его положения непрерывно фиксируются в памяти ЭВМ. Параллельно в машину посылают данные о контейнере (масса, размеры и тип) при помощи клавишного набора на пульте управления.
При полуавтоматическом управлении программа движения механизмов крана набирается на клавишном пульте. Пуск механизмов подъема, передвижения тележки и крана осуществляется отдельными кнопками на пульте управления. Работа приводов заканчивается автоматически, когда контейнер достигает заданной позиции.
Система автоматического управления бывает разомкнутой, с обратной связью и самонастраивающейся. В разомкнутой системе процесс управления осуществляется по заданной программе и контролируется машинистом. В системах с обратной связью на пульт управления подается информация о регулируемых величинах, и последующие операции самокорректируются. Самонастраивающиеся автоматические системы работают длительное время по заданной программе, причем самокорректировка их зависит от состояния системы и внешних условий.
На крупных контейнерных пунктах применяют автоматическую систему управления (АСУ) «Строп», которая работает следующим образом. Информация о прибытии вагонов с контейнерами на станцию с натурных листов поезда передается из станционного технологического центра обработки поездной информации и поездных документов (СТЦ) в ЭВМ, установленную на контейнерном пункте. После поступления перевозочных документов в товарную контору-товарный кассир, используя накладную, контролирует правильность введенной информации и дополняет ее’ новыми реквизитами: род и масса груза, наименование (код) получателя и отправителя, станция отправления, станция назначения (для транзитных контейнеров). Одновременно по мере накопления вагонов с контейнерами на пути сортировочного парка происходит их списывание с указанием последовательности расположения контейнеров в вагонах. Эта информация с дисплея в СТЦ также вводится в ЭВМ, установленную на контейнерном пункте. После подачи вагонов с контейнерами на площадку старший приемосдатчик списывает номера вагонов с указанием их места расположения на контейнерной площадке.
На основании предварительной информации из СТЦ с учетом планируемого завоза-вывоза грузов и контейнеров, находящихся на контейнерных площадках, ЭВМ составляет план комплектообразо-вания, при котором минимизируются суммарные пробеги кранов.
Завоз контейнеров на контейнерный пункт планируется на основании завизированных накладных и планов погрузки. Информация о завезенных контейнерах вводится оператором. в ЭВМ, которая составляет план работы кранов по перегрузке контейнеров, а также выдает для водителя автомобиля-экспедитора наряд на вывоз очередных контейнеров. Кроме того, водителю выдается план оптимального объезда зон контейнерных площадок, если автомобиль обрабатывает несколько зон.
При оперативном планировании работы кранов по обработке вагонов и автомобилей преследуется цель обеспечить максимальный объем перегрузки по прямому варианту (вагон — автомобиль и автомобиль—вагон), а также минимизировать время работы крана, а следовательно, и простои вагонов и автомобилей. Выработанные ЭВМ команды передаются на табло машинистам кранов и для контроля на дисплей приемосдатчику. Машинист крана осуществляет перегрузочные операции. При вывозе контейнеров с контейнерного пункта их номера также вводятся в ЭВМ с дисплея, установленного на выезде с территории. Работа всех операторов с ЭВМ ведется в диалоговом режиме. В памяти ЭВМ заложена модель контейнерной площадки, где фиксируются все перемещения контейнеров. Таким образом автоматически решается проблема поиска нужного контейнера.
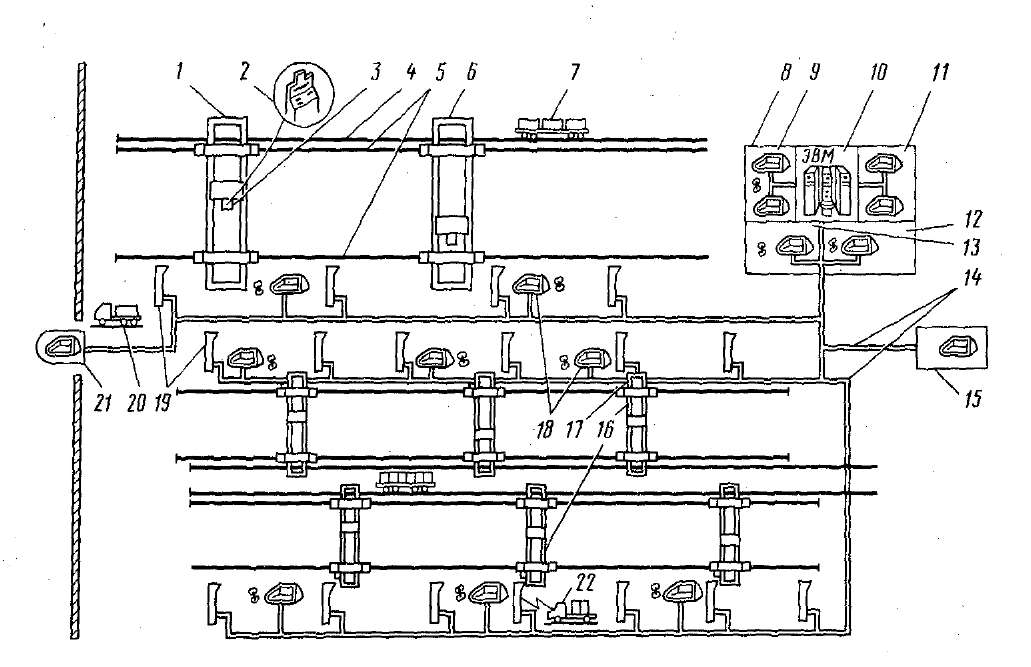
Рис. 1. Схема автоматизированного контейнерного пункта:
1, 6 — краны для крупнотоннажных контейнеров; 2 — пульт машиниста; 3 — кабина крана; 4 — железнодорожный путь; 5 — подкрановые рельсы; 7 — железнодорожные платформы; 8 — центральный пульт управления; 9 — дисплеи старших приемосдатчиков; 10 — зал ЭВМ; 11—дисплеи товарных кассиров; 12— дисплеи диспетчера системы; 13—дисплеи в СТЦ; 14 — каналы передачи данных; 15 — дисплей автодиспетчера; 16 — краны для среднетоннажных контейнеров; 17 — кабина крана; 18 — дисплеи приемосдатчиков; 19 — устройство ввода жетонов; 20 — автомобиль с контейнерами на выходе с контейнерного пункта; 21 —дисплей контрольно-пропускного пункта; 22 — автомобиль под погрузочно-разгрузочными операциями
Научно-исследовательскими институтами стран—членов МОЭС под руководством ВНИИЖТ разработана АСУ контейнерной транспортной системой. Схема автоматизированного контейнерного пункта показана на рис. 1. Она предусматривает автоматическое управление контейнерными кранами и спредерами при перегрузочных операциях, а также обработку коммерческой документации.
Рекламные предложения:
Главная → Справочник → Статьи → Форум
Механизация земляных работ
Механизация строительства
Механизация дорожных работ
Автоматизация строительства
→ Бетонные работы
→ Мини-тракторы
 Разделы
Разделы
Строительные машины и оборудование
→ Для специальных земляных работ
→ Дорожно-строительные машины
→ Строительное оборудование
→ Асфальтоукладчики и катки
→ Большегрузные машины
→ Строительные машины, часть 2,
→ Дорожные машины, часть 2
→ Ремонтные машины
→ Ковшовые машины
→ Автогрейдеры
→ Экскаваторы
→ Бульдозеры
→ Скреперы
→ Грейдеры
Эксплуатация строительных машин
→ Эксплуатация средств механизации
→ Эксплуатация погрузочных машин
→ Эксплуатация паровых машин
→ Эксплуатация экскаваторов
→ Эксплуатация подъемников
→ Эксплуатация кранов перегружателей
→ Эксплуатация кузовов машин
→ Крановщикам и стропальщикам
Ремонт строительных машин
Ремонт дорожных машин
Ремонт лесозаготовительных машин
Ремонт автомобилей КАмаЗ
Техническое обслуживание автомобилей
Очистка автомобилей при ремонте
Материалы и шины
Остались вопросы по теме:
"Автоматизация перегрузки контейнеров"
— воспользуйтесь поиском.
→ Машины городского хозяйства
→ Естественная история машин
→ Транспортная психология
→ Пожарные автомобили
→ Автомобили-рефрижераторы
→ Монтаж и эксплуатация лифтов
→ Тракторы