Строй-Техника.ру
Строительные машины и оборудование, справочник
Управление и регулирование процесса рыхления осуществляют изменением скорости и тягового усилия базового трактора, а также дистанционным управлением положением рабочего органа: при заглублении-выглублении, регулировании угла рыхления и шага зубьев (многозубых рыхлителей).
В условиях интенсификации производства земляных работ на различных видах строительства дальнейшее повышение эффективности использования рыхлителей может быть достигнуто путем автоматизации управления основными операциями рабочего процесса, что одновременно позволяет улучшить условия труда водителя.
Полностью автоматизировать процесс рыхления грунтов сложно вследствие непрерывно меняющихся условий и технологии проведения работ, разнообразия и неоднородности физико-механических свойств грунтов, нестационарного характера возмущающих воздействий на движители, неровностей рельефа местности и других факторов. Для рыхлителей с бульдозерами наиболее приемлема автоматизация частичная и комплексная с участием и контролем водителя машины. При этом выполнение функции управления и регулирование процесса рыхления автоматами существенно снижает утомляемость водителя и является предпосылкой увеличения производительности и безопасности труда, надежности машины, уменьшения топливоэнергетических затрат.
Рекламные предложения на основе ваших интересов:
Дополнительные материалы по теме:
Различают автоматизацию контроля, защиты и регулирования процесса рыхления.
Автоматический контроль процесса на рыхлителе осуществляется с использованием предупредительной сигнализации и автоматического наблюдения главным образом за состоянием узлов и агрегатов базового трактора. В частности, на бульдозере с рыхлителем мод. D-155W (фирма «Комацу») для подводных работ предусмотрены средства сигнализации об опасных положениях машины и состоянии узлов: попадании воды в герметизированный отсек двигателя, нарушении герметизации других узлов, недостаточном количестве топлива, утечке рабочей жидкости из гидросистемы, опасном уклоне машины.
Известные попытки автоматического контроля за состоянием наконечника зуба рыхлителя, величиной заглубления, изменением вылета зуба, угчом рыхления не нашли практического применения вследствие небольшой их надежности и неоправданного усложнения конструкции оборудования.
В настоящее время в основном используют визуальный контроль за состоянием оборудования в рабочих положениях непосредственно с места водителя. На рыхлителях фирмы «Катерпиллер Трактор» с регулируемым углом рыхления установлен указатель угла рыхления, расположенный на гидроцнлиндре регулирования в зоне видимости водителя. На однозубых рыхлителях фирмы «Комацу» изменение вылета стойки зуба контролируют по совмещению поперечных отметок передней грани стойки и верхней плоскости рабочей балки.
При механизированной разработке грунтов применяют автоматический контроль загрузки двигателя базового трактора, что облегчает водителю выбор наиболее оптимальных режимов работы с использованием ручной корректировки. Известно автоматизированное устройство контроля загрузки двигателя базового трактора с ультразвуковыми датчиками замера действительной скорости движения и тензодатчиком нагрузки, встроенным в силовой контур навесного оборудования. Генератор направленных ультразвуковых колебаний частотой 40 кГц установлен в задней части трактора. Отраженный сигнал от поверхности грунта воспринимает приемник ультразвуковых колебаний. Заданный и отраженный сигналы передаются в электронный блок, преобразующий величину рассогласования в электрический сигнал напряжением 0—10 В. Системы осуществляют измерение нагрузки на рабочем оборудовании и одновременно вырабатывают электрический сигнал 2—10 В. Автоматическое перемножение сигналов, характеризующее тяговую мощность базового трактора, подается водителю в звуковой форме (через наушники) или в форме показаний цифрового (стрелочного) прибора, смонтированного на панели управления. Водитель корректирует режим работы машины в зависимости от сообщаемого сигнала.
Автоматическая защита на рыхлителях служит для предотвращения выхода из строя главным образом узлов гидросистемы базового трактора и элементов гидропривода: гидроцилиндров подъема-опускания и регулирования угла рыхления навесного оборудования. В частности, в конструкции гидроцилиндров рыхлителя ДП-29ХЛ предусмотрена установка гидрозамков (предохранительных клапанов), защищающих привод от перегрузок наибольших реактивных давлений при рыхлении прочного грунта.
В качестве автоматической защиты гидросистемы от перегрузок следует рассматривать шарнирно-рычажный механизм фирмы «Катерпиллер Трактор», связывающий нижнюю тяговую раму рыхлителя с рукоятью гидрораспределителя управления подъемом-опусканием зуба. При достижении зубом крайних (верхнего или нижнего) положений золотник распределителя автоматически устанавливается в нейтральную позицию. С этой же целью в гидроцилиндрах подъема-опускания некоторых рыхлителей устанавливают переливные клапаны для разгрузки гидросистемы при достижении штоком крайних положений. Ввиду сложности исполнения и незначительного влияния на работоспособность оборудования указанные системы в современных конструкциях распространения не получили.
Система автоматического регулирования (САР) предназначена для поддержания параметров процесса рыхления в определенных пределах с целью получения максимальной производительности в заданных технологических и грунтовых условиях с наибольшим использованием эффективной мощности двигателя.
Увеличение подвижности рыхлительного оборудования, появление дистанционно управляемых механизмов подъема-опускания оборудования, изменения угла рыхления и шага зубьев в сочетании с увеличением единичной мощности базового трактора позволяет повысить эффективность САР путем адаптации рабочего органа к широко изменяющимся грунтовым условиям и технологии ведения работ. В соответствии с анализом существующих тенденций автоматизации предпочтение отдается системам с программным управлением, согласно которым параметры рыхлителя и процесса рыхления изменяют по заданному закону.
Известны решения САР положения рабочих органов для рыхлителей четырехзвенного типа с регулируемым углом рыхления.
Для автоматического регулирования угла рыхления при заглублении или установившемся процессе оборудуют нижнюю тяговую раму рыхлителя потенциометрическим датчиком высотного регулирования — для задания глубины перехода от режима внедрения зуба в массив к установившемуся рыхлению. На корпус гидроци-линдра регулирования угла рыхления монтируют датчик перемещений, содержащий четыре пары точечных источников света и фоторезисторов. В центральной части датчика перемещений установлен стержень — перекрывающий световой поток между источниками света и фоторезисторами в определенных положениях штока гидроцилиндра регулирования угла рыхления.
Сигнал от потенциометрического датчика подается на электронный блок сравнения и усиления с задающим сигналом и далее на блок реле для включения электромагнитного гидрораспределителя управления гидроцилиндром изменения угла рыхления. В блоке предусмотрены реле, управляемые от фотооптического датчика перемещения. При включении САР рычагом задающего устройства устанавливают глубину изменения режима работы, а углы установки рабочего органа регулируют автоматически, большие — при заглублении и меньшие — при установившемся рыхлении. Ручная корректировка угла рыхления предусмотрена в небольших пределах путем продольного смещения фотооптического датчика на корпусе гидроцилиндра.
Для автоматического регулирования угла и глубины рыхления может быть использован тензодатчик, установленный в наиболее нагруженных местах на опорной раме или нижней тяге. При превышении нагрузок заданного значения блок реле включает электромагнитный гидрораспределитель системы управления, подающий рабочую жидкость к гидроцилиндру сервоуправления гидрораспределителем привода цилиндров подъема-опускания. Для управления им может быть использован также сигнал от датчика давления, установленного в поршневой полости одного из гидроцилиндров регулирования угла резания. Вверху опорной рамы устанавливают поворотное кулачковое устройство с конечными выключателями, имеющими регулируемые упоры, связанные шарнирно-рычажной системой с корпусом гидроцилиндра регулирования угла резания. Устройство выключает распределитель управления гидроцилиндрами подъема-опускания при достижении оборудования крайних верхнего и нижнего положений. Нижнее положение оборудования соответствует глубине оптимального рыхления и определяется положением одного из кулачков устройства САР. Предусмотрена также на рычаге переключения передач установка датчика автоматического подъема оборудования при движении трактора назад в режиме холостого хода. Включение САР контролируется сигнальными лампами.
Во ВНИИСтройдормаше разработана полностью гидрофициро-ванная система совмещения операций (ССО) заглубления-выглубления и изменения параметров рыхлителя (угла или шага рыхления) с использованием гидропривода базового трактора и серийной гидроаппаратуры, освоенной отечественной промышленностью ССО позволяет бесступенчато регулировать и совмещать ряд операций рабочего цикла рыхлителя с использованием одного рычага, что облегчает работу водителя при рыхлении грунтов с разными свойствами. ССО содержит основной и дополнительный насосы подачи рабочей жидкости через распределители к гидроцилиндрам подъема-опускания и адаптации рабочего органа (изменения угла или шага рыхления), фильтр, бак. Для реализации совмещения операций предусмотрена установка клапана или гидрораспределителя управления гидрораспределителем, гидрозамков, обратного клапана разгрузки гидроцилиндров.
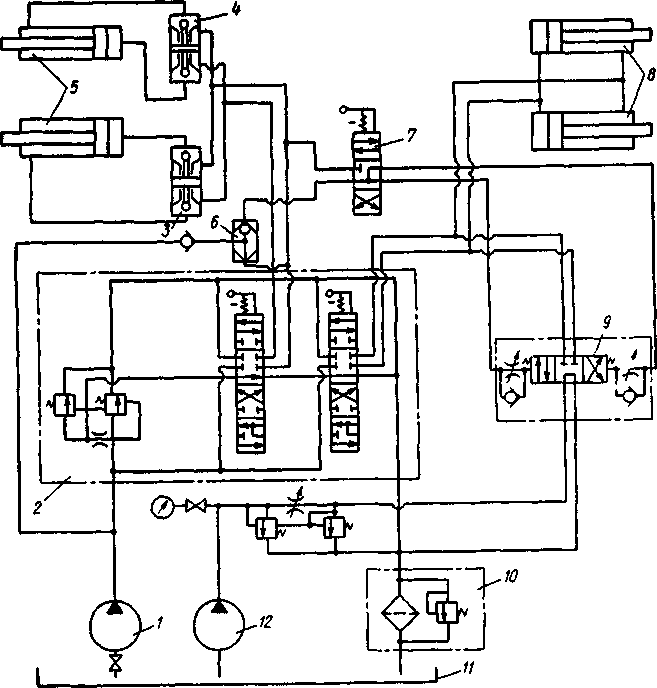
Рис. 1. Схема гидросистемы рыхлителя с полуавтоматической адаптацией рабочего органа
Раздельное управление операциями подъема-опускания и адаптации осуществляют с использованием потока рабочей жидкости от насоса при раздельном включении золотников распределителя. Золотники гидрораспределителей, в нейтральном положении.
Совмещение операции подъема-опускания и адаптации производят с использованием обоих насосов привода, что обеспечивает ускоренный переход от режима заглубления зуба к режиму рыхления. Совмещение операции обусловлено включением гидрораспределителя в одно из двух рабочих положений. Дальнейшее управление производят одним рычагом основного распределителя, часть рабочей жидкости которого через распределитель дистанционно воздействует на золотник распределителя, при включении которого рабочая жидкость дополнительного насоса подается к гидроцилиндрам адаптации рабочего органа. При установке золотника гидрораспределителя в нейтральное положение сброс остаточного давления в напорных магистралях происходит через клапан ИЛИ, обратный клапан и переливной клапан распределителя. Предохранение напорных магистралей от воздействия реактивных давлений в гидроцилиндрах при рыхлении осуществляют гидрозамками. При рабочем ходе гидроцилиндров обратный клапан находится в запертом положении в результате разности давления в магистралях.
Для регулирования скоростей совмещения операции адаптации рабочего органа в напорной магистрали насоса может быть установлен дроссель с регулятором. При использовании ССО для работы на рыхлителе с изменяемым шагом зубьев в напорных магистралях гидроцилиндров изменения шага устанавливают делители потока рабочей жидкости.
Проведенные исследования работоспособности ССО применительно к рыхлителю (МП-83) с изменяемым шагом рыхления на базе трактора Т-130 показали, что система обеспечивает постоянное отношение скоростей совмещения операций при различных режимах работы трактора, а также совмещение операции как увеличением, так и уменьшением шага при изменении глубины рыхления для получения сплошного разрушения за один проход па ширину захвата рыхлителя грунтов с разными свойствами.
Дальнейшее внедрение САР применительно к бульдозерному и рыхлительному оборудованию связано с созданием широкого класса функциональных приборов и узлов на базе микропроцессоров — программируемых логических устройств, изготовленных на базе больших интегральных схем.
Микропроцессорные системы (совокупность микропроцессора, памяти и устройства ввода — вывода), используемые в современной землеройной технике, обеспечивают оптимизацию процесса, повышают уровень безопасности работы водителя, облегчают управление машиной водителями с относительно низкой квалификацией, способствуют экономии топлива, особенно при работе мощных базовых тракторов. Фирма «Комацу» использует микропроцессорную систему для автоматизации управления трактором D-555 мощностью 746 кВт с бульдозерным и рыхлительным оборудованием. Первоначально осуществляют работу машины в режиме «память» с ручным управлением операциями рабочего цикла. В этом случае в микрокомпьютер закладывают данные относительно режимов работы машины в зависимости от свойств разрабатываемого грунта. Затем работу осуществляют в режиме «управление», в котором оптимальные параметры работы реализуются автоматически под контролем водителя.
Рекламные предложения:
Главная → Справочник → Статьи → Форум
Механизация земляных работ
Механизация строительства
Механизация дорожных работ
Автоматизация строительства
→ Бетонные работы
→ Мини-тракторы
 Разделы
Разделы
Строительные машины и оборудование
→ Для специальных земляных работ
→ Дорожно-строительные машины
→ Строительное оборудование
→ Асфальтоукладчики и катки
→ Большегрузные машины
→ Строительные машины, часть 2,
→ Дорожные машины, часть 2
→ Ремонтные машины
→ Ковшовые машины
→ Автогрейдеры
→ Экскаваторы
→ Бульдозеры
→ Скреперы
→ Грейдеры
Эксплуатация строительных машин
→ Эксплуатация средств механизации
→ Эксплуатация погрузочных машин
→ Эксплуатация паровых машин
→ Эксплуатация экскаваторов
→ Эксплуатация подъемников
→ Эксплуатация кранов перегружателей
→ Эксплуатация кузовов машин
→ Крановщикам и стропальщикам
Ремонт строительных машин
Ремонт дорожных машин
Ремонт лесозаготовительных машин
Ремонт автомобилей КАмаЗ
Техническое обслуживание автомобилей
Очистка автомобилей при ремонте
Материалы и шины
Остались вопросы по теме:
"Автоматизация рыхлителей"
— воспользуйтесь поиском.
→ Машины городского хозяйства
→ Естественная история машин
→ Транспортная психология
→ Пожарные автомобили
→ Автомобили-рефрижераторы
→ Монтаж и эксплуатация лифтов
→ Тракторы