Строй-Техника.ру
Строительные машины и оборудование, справочник
В настоящее время гидравлический привод механизмов грузоподъемных машин находит все более широкое применение благодаря наличию ряда преимуществ этого типа привода, к которым относятся:
1) большая перегрузочная способность по мощности и по моменту; возможность передавать большие моменты и мощности при малых размерах и весах гидропередачи;
2) возможность бесступенчатого регулирования скоростей в широких пределах;
3) возможность плавного реверсирования и частых быстрых переключений скорости движения;
4) легко осуществимое автоматическое предохранение машины и гидропередачи от перегрузок;
5) возможность дистанционного управления работой машины, регулирование и автоматизация рабочего процесса, достигаемая простыми средствами;
6) малый момент инерции вращающихся масс с большими ускорениями и замедлениями;
7) возможность одновременного подвода энергии к нескольким рабочим механизмам;
8) устойчивая работа при любых скоростных режимах;
9) высокая износоустойчивость элементов гидропривода.
В настоящее время с гидравлическим приводом выпускаются стреловые самоходные краны на безрельсовом и железнодорожном ходу, а в отдельных случаях плавучие, портальные и мостовые краны. Применение гидравлических приводов механизмов подъема, поворота и изменения вылета портальных кранов позволило существенно увеличить производительность крана, так как скорость поворота и подъема может автоматически регулироваться в зависимости от величины транспортируемого груза, предельная величина которого также устанавливается автоматически в зависимости от вылета стрелы. Так как гидрофицированные механизмы кранов могут работать при постоянном включении и постоянной скорости вращения электродвигателей, то это дает возможность применять наиболее надежные и дешевые электродвигатели с короткозамкнутым ротором.
Гидравлический привод грузоподъемных машин имеет приводной Двигатель, насос, подающий рабочую жидкость, используемую как средство преобразования и передачи энергии в рабочий цилиндр или гидродвигатель, исполнительный механизм и систему трубопроводов и клапанов управления.
Рекламные предложения на основе ваших интересов:
Дополнительные материалы по теме:
Давление жидкости в приводах современных грузоподъемных машин достигает 250 am. Увеличение давления способствует уменьшению габаритов передачи и потерь на трение, но одновременно увеличивает объемные потери и требует повышения надежности уплотнений.
Гидродвигатели, преобразующие энергию потока жидкости в механическую энергию, так же как и насосы, подразделяются на роторные и неротационные. К числу неротационных гидродвигателей относятся силовые цилиндры, которые значительно проще конструктивно, дешевле и более надежны в работе, чем роторные гидродвигатели. Поэтому они получили широкое применение в различных подъемно-транспортных машинах. В этих приводах жидкость, нагнетаемая насосом в силовой цилиндр, перемещает в нужном направлении поршень со штоком и части машины, соединенные со штоком. При этом наиболее просто осуществляется прямолинейное возвратно-поступательное движение, но движение штока может быть использовано и для получения вращательного движения. В случае необходимости совершения работы на большом пути перемещения, когда применение силовых цилиндров становится нецелесообразным, в качестве гидродвигателя используют роторные двигатели с вращательным выходным движением, подразделяемые на гидродвигатели малого момента и гидродвигатели высокого момента.
Применение в гидроприводах грузоподъемных машин высокомоментных гидродвигателей, позволяющих приводить механизмы в движение непосредственно от вала гидродвигателя без использования редукторов, является весьма перспективным. Однако низкомоментные гидродвигатели имеют меньшие колебания угловой скорости выходных валов и в несколько раз большую глубину регулирования, чем высокомоментные гидродвигатели. Плавное, бесступенчатое регулирование числа оборотов вала гидродвигателя достигается или изменением расхода жидкости (использование насосов регулируемой производительности), или путем изменения рабочего объема двигателя, или дросселированием (изменением величины потока рабочей жидкости, подводимой к гидродвигателю).
Каждый механизм грузоподъемной машины с гидравлическим при- , водом может выполняться как с индивидуальным приводом, так и с групповым приводом при питании нескольких гидродвигателей от одного насоса. Групповой привод находит применение в машинах малой грузоподъемности, а также в тех случаях, когда приводы нескольких механизмов вместе с гидродвигателями перемещаются относительно других приводов. При групповом приводе возможна как поочередная работа механизмов, так и одновременная работа механизмов, в зависимости от выбранной производительности насоса и мощности привода.
Существенным отличием гидравлического привода от механического является отсутствие жесткой связи между приводным двигателем и рабочим органом механизма. Это свойство гидропривода обеспечивает предохранение привода и рабочего органа от перегрузок, но в то же время неизбежное наличие утечек уменьшает скорость вращения вала гидродвигателя или скорость перемещения поршня гидроцилиндра и приводит к тому, что невозможно остановить вал гидродвигателя затормаживанием приводного электродвигателя, если на вал гидродвигателя действует статическая нагрузка.
Так как для большинства механизмов грузоподъемных машин перемещение рабочего органа при выключенном приводе является нежелательным, то основным критерием пригодности гидропривода для механизмов грузоподъемных машин является возможность работы со статической нагрузкой и величина допускаемого перемещения от нее При остановленном приводе.
В двигателях вращения поршневого типа утечки составляют 2—3%, а в лопастных двигателях могут даже превысить 10%. Поэтому если опускание максимального груза со скоростью от 2 до 10% от номинальной скорости является недопустимым, то для удержания поднятого груза в неподвижном состоянии следует установить тормоз на валу барабана.
В механизмах передвижения и поворота, где нет постоянной статической нагрузки, нет необходимости в установке тормоза и полную остановку механизма можно производить путем затормаживания ведущего вала. В механизмах подъема применение гидропривода обеспечивает плавное регулирование скоростей подъема и спуска в весьма широком диапазоне. Так, при применении гидромашин лопастного типа диапазон регулирования можно получить порядка от 8 до 15, для гидромашин поршневого типа — от 20 до 25. Минимальная величина скорости опускания груза ограничивается величиной утечек в гидродвигателе и при малых нагрузках существенно снижается.
В механизмах изменения Еылета передвижных кранов и кранов экскаваторов обычно применяется гидропривод поступательного движения как в случае качающейся, так и в случае телескопической выдвижной стрелы. Эта система обеспечивает существенное упрощение конструкции механизма. Очень часто совмещают качание стрелы с телескопическим выдвижением части ее, что повышает маневренность крана и позволяет совместить большой вылет с малыми габаритами механизм!.
В мостовых кранах гидропривод находит также все большее применение. Так, для механизмов передвижения мостовых кранов создан гидропривод с использованием высокомоментных гидродвигателей. Механизм выполнен по схеме раздельного привода с системой синхронизации движения концевых балок. Приводы размещены непосредственно около концевых балок. Каждый гидропривод состоит из радиально-поршневого регулируемого насоса 5 типа НДП, приводимого в движение от асинхронного короткозамкнутого двигателя и высокомоментного гидродвигателя типа ВГД-400, соединенного валом-вставкой с ходовым колесом.
Кроме того, в состав привода входит узел управления, монтируемый в кабине крановщика, и система трубопроводов. Насос при увеличении объема рабочей камеры создает вакуум, вследствие чего под Действием атмосферного давления рабочая жидкость засасывается из. бака и затем нагнетается через реверсивный золотник в высокомоментным гидродвигатель, вращающий ходовое колесо. Из сливного канала гидродвигателя жидкость через реверсивный золотник поступает к всасывающей полости насоса. Реверсивное устройство золотникового типа с электрогидравлическим управлением предназначено для реверсирования вращения гидродвигателя и перекрытия трубопроводов. Крайние положения золотника используются для получения реверса, а средние — для перекрытия потоков жидкости и торможения механизма. При торможении крана или при аварийном выключении тока золотник перемещается в среднее положение и перекрывает потоки жидкости. Мостовой кран, двигаясь по инерции, вращает ротор гидродвигателя и жидкость перемещается из одной ветви трубопровода в другую и действует на один из клапанов тормозного устройства. Меняя степень сжатия пружины клапана, можно получить различные тормозные характеристики. Пиковые нагрузки при пуске и торможении ограничиваются предохранительным клапаном, расположенным в насосе, дроссельным устройством и тормозными клапанами гидродвигателя. Дроссели служат также для автоматической синхронизации движения концевых балок моста крана при различных сопротивлениях движению каждой из них.
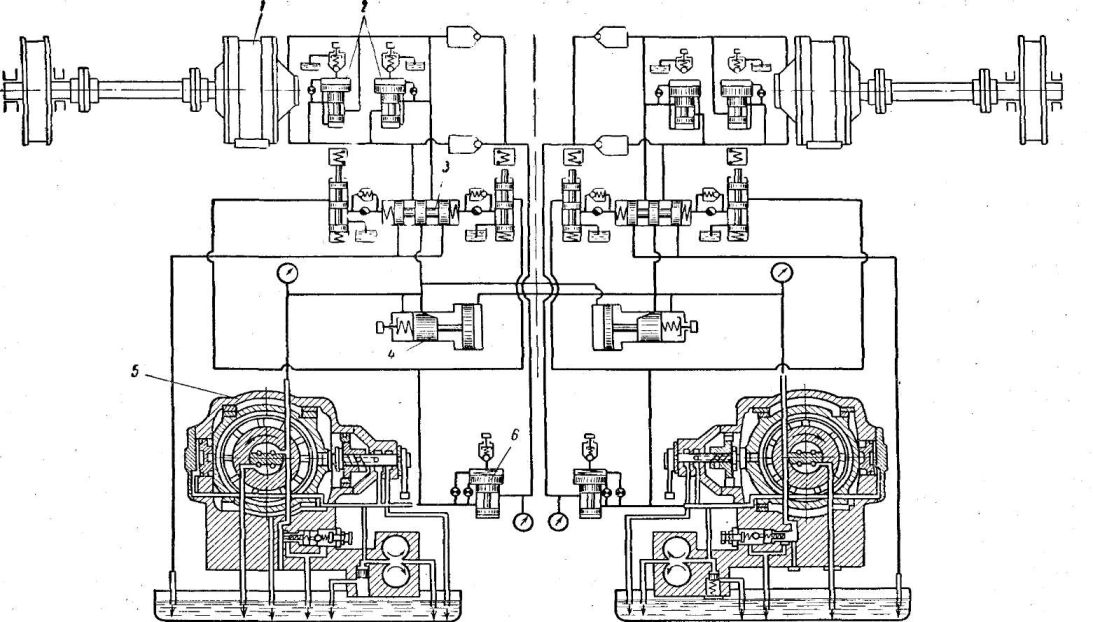
Рис. 1. Гидравлическая схема механизма передвижения мостового крана с высокомоментным гидродвигателем
Принцип действия дросселя основан на отводе определенного количества жидкости, пропорционального разности нагрузок, от нагнетающей полости насоса. Пружина дросселя настраивается на преодоление давления жидкости, соответствующего 125% номинального момента гидродвигателя. При дальнейшем увеличении давления поршень дросселя перемещается, сжимая пружину и открывая отверстие соответствующего размера, и определенное количество жидкости отводится в бак от насоса забежавшей стороны.
Регулирование скорости вращения вала гидродвигателя осуществляется посредством изменения производительности регулируемого гидронасоса.
Производительность насоса, регулируемая величиной эксцентриситета насоса, зависит от давления на выходе редукционного клапана. Узел управления с редукционным клапаном монтируется в кабине крановщика и для удобства выполнен педального типа.
Проведенные исследования показали, что гидропривод с высоко-моментным гидродвигателем в механизмах передвижения мостовых кранов имеет следующие преимущества перед электромеханическим приводом:
1. Значительно упрощается механическая часть и электрическая схема: отсутствуют редукторы, муфты, трансмиссия, тормоза, нет необходимости в применении регулируемых электродвигателей и сложной электрической аппаратуры, что приводит к снижению на 20% веса и стоимости механизма.
2. Обеспечивается бесступенчатое и плавное регулирование скорости при постоянном моменте на валу гидродвигателя, плавный пуск и торможение.
Процесс пуска и торможения происходит без колебательных нагрузок в упругих звеньях механизма, что благоприятно влияет на Работу крана, подкрановых путей и зданий цехов.
По сравнению с реостатным регулированием электродвигателей, наиболее распространенным в краностроении, общий к. п. д. гидропривода почти на всем диапазоне регулирования значительно выше.
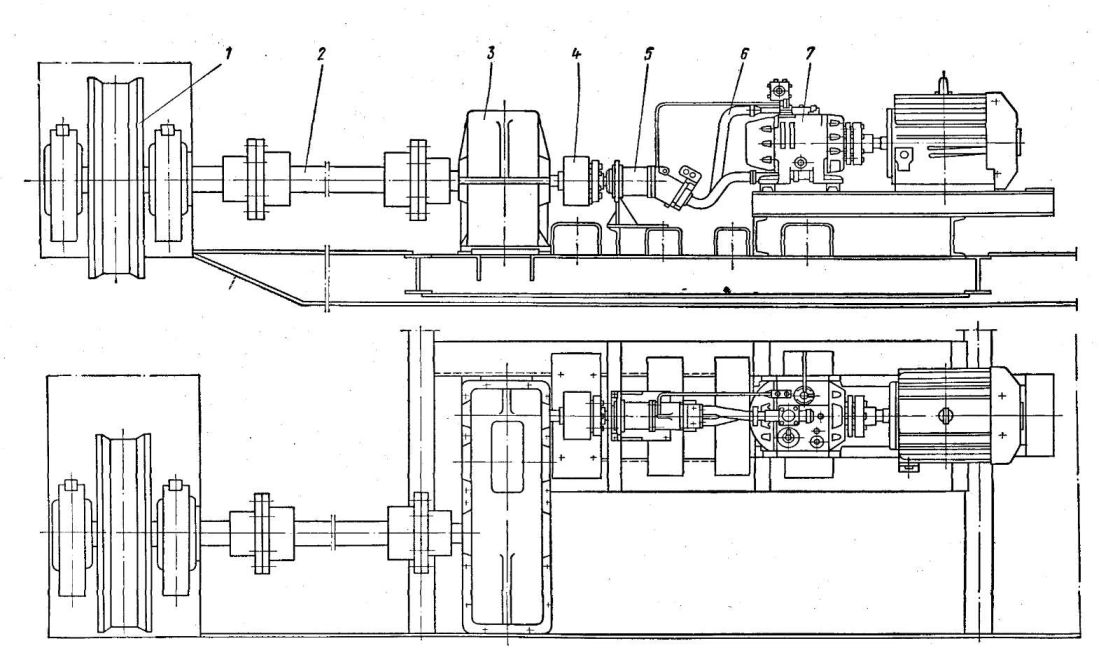
Рис. 2. Гидропривод механизма передвижения мостового крана с низкомоментным гидродвигателем
Имеются схемы механизмов передвижения мостовых кранов и с низкомоментным гидродвигателем. При этом необходимая скорость рабочих движений достигается благодаря применению редуктора. Такая конструкция приведена на рис. 2. Опыт ее использования показал, что глубина регулирования скорости вращения выходного вала низкомоментного (высокооборотного) гидродвигателя в несколько раз выше, чем у высокомоментного гидродвигателя. Необходимая скорость передвижения крана достигается установкой редуктора. Гидропривод в этой конструкции работает по замкнутой системе с номинальным давлением 100 am. Давление, развиваемое насосом, передается по трубопроводу в гидродвигатель, где энергия жидкости преобразуется во вращательное движение, передающееся через упругую муфту редуктору и далее через вал на ходовое колесо. Установки тормоза в данной конструкции не требуется, так как регулирование скорости и затормаживание крана осуществляются путем регулирования объема насосом.
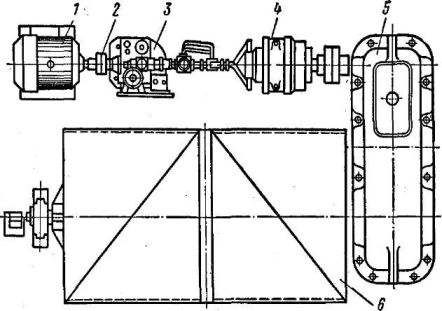
Рис. 3. Электрогидравлический привод механизма подъема монтажного крана
Механизмы подъема монтажных кранов, в которых необходимо создание весьма малых посадочных скоростей и плавного пуска при подъеме тяжелых блоков, также снабжаются гидроприводом. Приводной двигатель через упругую муфту передает вращение приводному валу регулируемого гидронасоса типа ПД, давление от которого передается высокомоментному гидродвигателю типа МР-Т4/10 со встроенным дисковым тормозом. Этот тормоз выполнен так, что торможение гидродвигателя осуществляется механическим путем — сжатием фрикционных дисков пружинами, а растормаживание — гидравлическим способом, подведением давления под плунжеры, которые сжимают пружины и снимают усилие давления с дисков. При прекращении подачи жидкости или при обрыве трубопровода груз надежно удерживается тормозом. Вращение от выходного вала гидродвигателя через редуктор передается на барабан. В отличие от ранее применяемой схемы с электроприводом здесь удалось снять один редуктор и получить глубину регулирования до 1 : 1500, которая недостижима при использовании других типов передач. В данном механизме применена замкнутая гидравлическая схема с номинальным давлением жидкости 100 am.
Так как приводной электродвигатель запускается при нулевой производительности насоса, то создаются благоприятные условия пуска и торможения, что позволяет применять более дешевые электродвигатели общего назначения типа А, АО и др.
Рекламные предложения:
Главная → Справочник → Статьи → Форум
Механизация земляных работ
Механизация строительства
Механизация дорожных работ
Автоматизация строительства
→ Бетонные работы
→ Мини-тракторы
 Разделы
Разделы
Строительные машины и оборудование
→ Для специальных земляных работ
→ Дорожно-строительные машины
→ Строительное оборудование
→ Асфальтоукладчики и катки
→ Большегрузные машины
→ Строительные машины, часть 2,
→ Дорожные машины, часть 2
→ Ремонтные машины
→ Ковшовые машины
→ Автогрейдеры
→ Экскаваторы
→ Бульдозеры
→ Скреперы
→ Грейдеры
Эксплуатация строительных машин
→ Эксплуатация средств механизации
→ Эксплуатация погрузочных машин
→ Эксплуатация паровых машин
→ Эксплуатация экскаваторов
→ Эксплуатация подъемников
→ Эксплуатация кранов перегружателей
→ Эксплуатация кузовов машин
→ Крановщикам и стропальщикам
Ремонт строительных машин
Ремонт дорожных машин
Ремонт лесозаготовительных машин
Ремонт автомобилей КАмаЗ
Техническое обслуживание автомобилей
Очистка автомобилей при ремонте
Материалы и шины
Остались вопросы по теме:
"Гидравлический привод"
— воспользуйтесь поиском.
→ Машины городского хозяйства
→ Естественная история машин
→ Транспортная психология
→ Пожарные автомобили
→ Автомобили-рефрижераторы
→ Монтаж и эксплуатация лифтов
→ Тракторы