Строй-Техника.ру
Строительные машины и оборудование, справочник
Для привода крановых и вспомогательных металлургических механизмов, работающих в повторно-кратковременных или кратковременных режимах, применяются электродвигатели трехфазного тока серий МТ и МТК, а для работы при повышенной температуре окружающей среды создана серия МТВ-МТКВ с теплостойкой стеклянной изоляцией. Основным номинальным режимом их является повторно-кратковременный с относительной продолжительностью включения ПВ-25%. Электродвигатели серий МТ, МТК, МТВ и МТКВ изготовляются на напряжения 220/380 и 500 в для частоты 50 гц.
Электродвигатели серии МТ с фазовым ротором изготовляются на 1000, 750 и 600 синхронных об/мин.
Электродвигатели серии МТК короткозамкнутые, повышенного скольжения изготовляются в односкоростном и двух-скоростном исполнениях. Односкоростные двигатели серии МТ изготовляются на 1000 и 750 синхронных об!мин.
Рекламные предложения на основе ваших интересов:
Дополнительные материалы по теме:
Двухскоростные двигатели МТК (В) предназначены для крановых механизмов, требующих регулирования скорости.
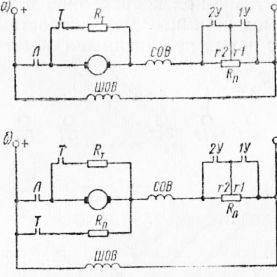
Рис. 1. Схема динамического торможения двигателя смешанного возбуждения
Последовательное соединение быстроходной и тихоходной обмоток в комбинации с сопротивлениями дает возможность получить ряд искусственных характеристик двухскоростных электродвигателей. Они предназначены для работы в повторно-кратковременном режиме с частыми пусками и торможениями. Двухскоростные двигатели изготовляются с двумя независимыми обмотками на статоре на напряжение 220, 380 или 500 в.
Быстроходные обмотки имеют соединение фаз звездой или треугольником. От быстроходной обмотки в коробку выводов выведено три провода.
Тихоходные обмотки при всех напряжениях имеют соединение фаз звездой, в коробку выводов выведено шесть проводов — начала и концы обмоток фаз.
Это дает возможность осуществлять последовательное соединение быстроходной и тихоходной обмоток для ограничения максимального генераторного момента при переходе с большой скорости на малую, а также непрерывно питать двигатель при переходе с одной скорости на другую. При последовательном соединении обеих обмоток необходимо, чтобы двигатель имел одно направление вращения при раздельной работе на каждой из обмоток.
На рис. 2 и 3 показаны схемы включения двухскоростных электродвигателей.
Обозначения выводов двухскоростных электродвигателей МТК сделаны в соответствии с ГОСТом 183—66.
Перед буквой С стоит число, указывающее количество полюсов обмотки. Перед обозначением зажимов тихоходной обмотки стоит буква Т. Обозначения выводов обеих обмоток соответствуют одному направлению вращения при работе на различных скоростях.
При включении в сеть одной из обмоток вторая обмотка может быть замкнута накоротко.
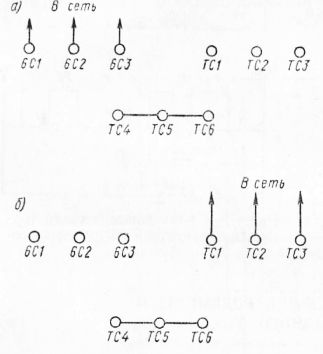
Рис. 2. Схемы включения в сеть двухскоростных двигателей серии МТК
Кроме серии МТК двигателей с короткозамкнутым ротором разработана серия двухскоростных двигателей типа МТКМ конструктивно с небольшими изменениями, выполненных так же, как и двигатели односкоростной серии МТК (В), но с изоляцией класса Н.
Эти электродвигатели выпускаются только на одно напряжение 220, 380 или 500 в без переключения со звезды на треугольник. В клемм-ную коробку выводятся от быстроходной обмотки три провода. Тихоходная обмотка рассчитана на соединение звездой при всех напряжениях. От тихоходной обмотки в коробку зажимов выводятся все шесть выводов обмотки (начала и концы фаз).
На рис. 76 показаны характеристики электродвигателя МТКВ 52-6/20 при последовательном включении обеих обмоток, а также характеристика при последовательном включении обеих обмоток и шунтировке фаз быстроходной обмотки активным сопротивлением.
Последовательное соединение быстроходной и тихоходной обмоток в комбинации с сопротивлениями дает возможность получить ряд искусственных характеристик двухскоростного электродвигателя.
Электродвигатели нормального исполнения 1—5-й величин имеют изоляцию класса А (типы МТ и МТК), электродвигатели 6 и 7-й величин изготовляются в металлургическом исполнении с изоляцией класса В (типы МТВ и МТКВ).
Электродвигатели серий МТ и МТК отличаются повышенной перегрузочной способностью и имеют соответственно повышенную механическую прочность; они допускают присоединение к механизму посредством муфты или зубчатой передачи.
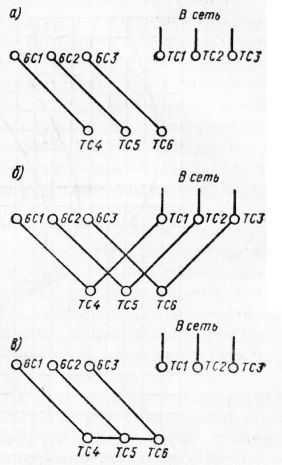
Рис. 3. Схемы включения в сеть двухскоростных электродвигателей серии МТК: а — при последовательном соединении обмоток; б — на большую скорость; в — на малую скорость
Станина и подшипниковые щиты — чугунные, станина имеет аксиально расположенные ребра, увеличивающие поверхность охлаждения электродвигателя и направляющие поток охлаждающего воздуха вдоль нее.
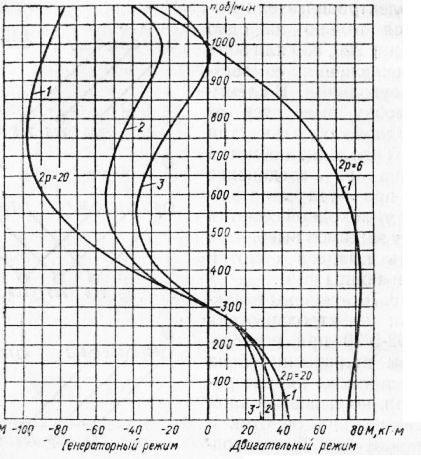
Рис. 4. Характеристики двухскоростного электродвигателя МТКВ 52-6/20:
1 — естественные; 2 — при последовательном соединении сбмоток с шунтированием фаз быстроходной обмотки активным сопротивлением; 3 — при последовательном соединении обмоток; 2р — число пар полюсов
Коробка выводов обмотки статора располагается на верхней части станины и имеет по одному отверстию с левой и правой стороны для ввода питающих кабелей; неиспользуемое отверстие закрывается заглушкой. Выводные концы обмоток статора заканчиваются в клеммной коробке кабельными наконечниками.
В электродвигателях на 220/380 в для переключения с одного напряжения на другое выведено 6 концов обмотки статора. С внутренней стороны к крышке коробки прикреплена схема присоединения питающих проводов к двигателю.
Ввод проводов, идущих от обмоток ротора электродвигателей серии МТ, сделан с боковых сторон подшипникового щита. Провода присоединяются прямо к щеткодержателям. Подшипники электродвигателей 1—4-й величин — шариковые, 5—7-й величин — роликовые.
Пуск в ход асинхронного двигателя с короткозамкнутым ротором производится прямым включением сетевого рубильника. При неподвижном роторе скорость пересечения его обмотки переменным магнитным полем равна 100% и поэтому э. д. е., индуктируемая в обмотке ротора, велика, отсюда велик и ток в роторе, а следовательно, и ток статора, который во время пуска в пять-шесть раз выше тока полной нагрузки. При таком большом токе двигатель быстро нагреется, а быстрое нарастание вращающего момента вызовет механические удары.
Для уменьшения пускового тока и момента обмотку ротора делают разомкнутой, соединенной внутри машины звездой или треугольником, концы которой присоединяют к контактным кольцам. При включении двигателя вводят в цепь ротора пусковое сопротивление, которое соответствует выбранному значению тока и момента. Если момент двигателя превысит момент нагрузки, двигатель начнет вращаться, а скольжение, ток и момент будут уменьшаться.
При неизменном сопротивлении в цепи ротора двигатель будет разгоняться до тех пор, пока момент, развиваемый им, не станет равным моменту нагрузки. После этого он будет вращаться с постоянной, но пониженной скоростью. Для дальнейшего разгона надо уменьшить сопротивление настолько, чтобы ток и момент вновь возросли до первоначального пускового значения. Таким последовательным уменьшением пускового сопротивления доводят скорость вращения двигателя до номинальной. Очевидно, что чем больше число пусковых ступеней, тем более плавным будет нарастание скорости.
Когда разгон закончен, обмотку ротора можно замкнуть накоротко, если далее двигатель будет работать продолжительно и не требуется регулирование его скорости. Для крановых двигателей такой режим не применим. Вслед за разгоном следует отключение двигателя от сети, торможение и снова пуск.
Скорость асинхронного двигателя, работающего без дополнительных сопротивлений в цепи ротора, мало отличается от синхронной. При работе крана часто требуется снижать скорость, увеличивая для этого скольжение ротора.
Наиболее простым и удобным способом увеличения скольжения является включение регулировочного сопротивления в цепь ротора. При добавочном сопротивлении ток ротора снизится и двигатель не сможет развить вращающий момент, необходимый для преодоления момента нагрузки. Для увеличения тока в роторе при повышенном сопротивлении внешней цепи ротора необходимо увеличить э. д. с. ротора, чтобы поддержать величину тока на прежнем уровне, а это произойдет автоматически за счет увеличения скольжения.
При неизменной нагрузке на валу двигателя скольжение ротора примерно пропорционально сопротивлению цепи ротора.
Увеличивая сопротивление роторной цепи в четыре раза, мы увеличиваем также и скольжение в четыре раза.
Для электродвигателя типа МТ 51-8 мощностью 22 кет синхронное число оборотов в минуту — 750, номинальное число оборотов при полной нагрузке — 723 и скольжение — 3%.
Увеличив сопротивление роторной цепи в четыре раза, получим увеличение скольжения 12%, т. е. скорость этого двигателя теперь будет: 750 – 660 об!мин. Отсюда
видно, что, зная нагрузку электродвигателя, можно определить сопротивление цепи ротора, соответствующее заданной скорости вращения, которая всегда меньше синхронной.
Для регулирования скорости вращения кранового электродвигателя делают 5—6 ступеней сопротивления, и тогда двигатель может работать не только на своей естественной характеристике, но и на любой из искусственных.
Этот способ регулирования скорости вращения двигателя очень прост, но расход электроэнергии из сети будет таким, как если бы двигатель работал с полной мощностью. Происходит это потому, что при неизменном моменте нагрузки мощность, потребляемая двигателем из сети, остается неизменной, а полезная мощность при этом тем меньше, чем меньше скорость вращения.
Потери энергии расходуются на нагрев регулировочных сопротивлений. Устройство ротора асинхронного двигателя с обмоткой только и требуется для регулирования скорости вращения. Скорость вращения двигателя с короткозамкнутым ротором таким способом регулировать нельзя.
Для остановки электродвигателя достаточно отключить его от сети и, если скорость движения механизма мала и нет внешних сил, воздействующих на механизм, он быстро остановится под действием сил трения. Однако чаще всего после отключения двигателя механизмы крана продолжают двигаться по инерции или под действием поднятого груза.
Правила безопасности требуют применять торможение для быстрой остановки крановых механизмов и для удержания их в неподвижном состоянии после отключения двигателя.
Торможение бывает механическое и электрическое.
Устройство механических тормозов обязательно на каждом кране.
На быстроходных кранах для быстрой остановки часто применяют электрическое торможение.
Наиболее простой способ электрического торможения — торможение противовключением. При этом делается реверс двигателя — он переключается для работы в противоположном направлении, хотя ротор его продолжает вращаться в прежнем направлении, против поля статора. Теперь скорость пересечения проводников ротора магнитным полем статора будет больше синхронной, скольжение больше единицы, момент двигателя изменит направление и станет тормозным. Напряжение ротора в этом случае будет больше напряжения при неподвижном роторе, и поэтому ток и тормозной момент двигателя необходимо ограничить включением большого сопротивления в цепь ротора. Как только механизм остановится, двигатель необходимо немедленно отключить от сети, иначе он начнет двигать механизм в противоположном направлении.
Торможение быстроходных тяжелых мостовых кранов производится одновременно электрическим и механическим тормозами.
Двигатель механизма подъема, совершая работу по подъему груза, часть энергии превращает в потенциальную энергию поднятого груза, которая превратится в кинетическую при опускании груза.
Для опускания груза не требуется включать двигатель, достаточно только освободить тормоз и груз сам начнет опускаться, вращая механизм, а с ним и ротор двигателя. Теперь двигатель может быть генератором и должен отдать в сеть часть энергии опускающегося груза.
Если двигатель включить на опускание груза, то груз будет увеличивать скорость ротора и она быстро достигнет синхронной и даже превысит ее.
Скольжение двигателя станет отрицательным при сверх-синхронной скорости, т. е. ротор будет вращаться быстрее магнитного поля статора, будет опережать его.
В обмотке ротора, вращающегося со скоростью, большей скорости поля, индуктируется э. д. е., пропорциональная скольжению, и возникает ток, если цепь будет замкнута.
Ток ротора, взаимодействуя с магнитным полем статора, создает вращающий момент, направленный против момента, создаваемого грузом.
Если скорость вращения двигателя настолько превысит синхронную, что момент двигателя уравновесит момент груза, увеличение скорости прекратится.
Чем больше груз и чем больше сопротивление цепи ротора, тем больше будет и установившаяся скорость. Вращаясь со сверхсинхронной скоростью, двигатель автоматически превращается в генератор и отдает часть электроэнергии в сеть. Особенность асинхронного двигателя переходить из двигательного режима в генераторный очень удобна для кранового механизма из-за простоты и надежности этого способа управления. При спуске легкого груза или пустого крюка двигатель должен работать в сторону спуска, помогая грузу преодолевать сопротивление трения в механизме. При подъеме груза момент двигателя увеличивается за счет потерь на трение в механизмах, а при спуске полного груза эти потери снижают нагрузку двигателя на 30—40% момента, которым был нагружен двигатель при подъеме.
Для кранов с небольшой скоростью подъема способ спуска груза с торможением при сверхсинхронной скорости вполне удовлетворяет условиям эксплуатации.
Для быстроходных механизмов подъема, особенно при повышенной точности посадки груза, этот способ становится непригодным.
При электрическом торможении со сверхсинхронной скоростью установившаяся скорость не может быть меньше синхронной и для небольших перемещений или для снижения скорости перед остановкой приходится включать двигатель толчками, не давая ему развить полную скорость. Для этого способа управления при быстроходных механизмах требуется высокая квалификация крановщика. При применении этого вида торможения быстро изнашиваются двигатели и аппаратура, поэтому используют нижесинхронное торможение. Наиболее простой способ нижесинхронного торможения — способ противовключения, который позволяет значительно снизить скорость спуска тяжелого груза перед посадкой и разгрузить механический тормоз, которому придется сделать лишь часть тормозной работы.
Этот способ торможения обладает двумя недостатками:
1) скорость спуска зависит от веса груза и даже при небольшом изменении веса груза скорость его спуска значительно меняется;
2) если груз недостаточно велик, чтобы преодолеть момент двигателя, возможен подъем груза вместо спуска.
Эти недостатки усложняют управление по такому способу и иногда создают определенную опасность.
Торможение противовключением наиболее применимо для грейферных и магнитных кранов, быстроходные механизмы подъема которых требуют интенсивного торможения, а указанные недостатки не имеют места, так как груз на крюке всегда будет значительным—вес грейфера и магнита достаточно велик для того, чтобы на положениях спуска они не могли быть подняты.
Торможение двигателя при нижесинхронной скорости можно получить способом динамического торможения постоянным током.
Обмотка статора двигателя при этом питается постоянным током, а ротор замыкается на сопротивление. Постоянный ток создает неподвижное магнитное поле в статоре; ротор, вращаясь в этом магнитном поле, индуктирует в своих обмотках э. д. е., а так как обмотки замкнуты на сопротивление, в цепи ротора пойдет ток и создаст свое магнитное поле, которое создаст определенный тормозной момент. Очевидно, что чем выше скорость ротора, тем выше и индуктированная э. д. е., а следовательно, и тормозной момент.
Способ динамического торможения постоянным током применяется редко вследствие сложности электрооборудования, а также вследствие того, что нижесинхронная скорость спуска возможна только при тяжелых грузах.
Значительно проще способ торможения однофазным питанием статора. Обмотки статора для получения тормозного эффекта включаются по схеме на рис. 6.
Ротор при этом способе также замыкается на сопротивление.
Способ этот очень простой, но он имеет и недостатки — повышенный ток и повышенный нагрев статора, а при малых грузах — неудовлетворительное регулирование.
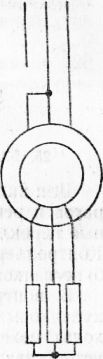
Рис. 6. Схема торможения однофазным питанием статора
В современном краностроении применяют чаще всего электрооборудование трехфазного переменного тока. Это объясняется преимуществами машин переменного тока по сравнению с машинами постоянного тока: меньше их масса, габариты и стоимость, выше КПД; проще в обслуживании, долговечнее и надежнее двигателей постоянного тока. Но электродвигатели переменного тока хуже поддаются регулированию частоты вращения и развивают меньшие пусковые моменты. В зависимости от исполнения ротора различают асинхронные электродвигатели с фазным ротором, имеющим контактные кольца, и двигатели с короткозамкнутым ротором.
На холостом ходу у двигателя скольжение очень мало и скорость ротора близка к синхронной. Номинальное скольжение асинхронного электродвигателя лежит в пределах 0,03—0,1.
Скольжение s = 1, когда ротор электродвигателя неподвижен при включенной обмотке статора. Такой режим называется режимом короткого замыкания электродвигателя. Пуск асинхронного электродвигателя всегда начинается именно с этого режима. Под действием постороннего источника механической энергии, например опускаемого груза, ротор электродвигателя может вращаться с частотой больше синхронной. В этом случае скольжение считается отрицательным.
Отрицательным будет и скольжение асинхронного электродвигателя при работе в генераторном режиме, Когда под действием опускаемого груза ротор вращается в ту же сторону, что и магнитное поле статора, с частотой больше синхронной. Если ротор асинхронного электродвигателя под действием опускаемого груза вращается в направлении, противоположном направлению вращения магнитного поля статора, то такой режим называется режимом противовключения.
Вращающий момент асинхронного электродвигателя создается за счет взаимодействия между вращающимся магнитным потоком статора и токами в обмотке ротора. Скольжение характеризует частоту вращения ротора относительно магнитного поля статора. Вращающий момент пропорционален квадрату напряжения сети, и поэтому даже незначительное снижение напряжения питающей сети приводит к резкому снижению вращающего момента. Допустимое снижение напряжения — не более 10%.
Для асинхронных электродвигателей так же, как и для двигателей постоянного тока, различают естественные и искусственные механические характеристики. Асинхронный электродвигатель работает по естественной механической характеристике в том случае, если его ста-торная обмотка включена в сеть трехфазного тока, напряжение и частота тока которой соответствуют номинальным значениям, и в цепи ротора отсутствуют какие-либо дополнительные сопротивления.
При введении в цепь ротора дополнительных сопротивлений зависимость частоты вращения ротора от момента будет прямолинейной.
При пуске асинхронные электродвигатели потребляют из питающей сети значительные пусковые токи. В момент пуска скольжение асинхронного электродвигателя — 100%, а в номинальном режиме не превышает 5 %.
Рис. 1. Упрощенные механические характеристики асинхронного электродвигателя
1 — естественная; 2 и 3 — искусственные
Значит, в момент пуска вращающееся магнитное поле статора в 20 раз чаще пересекает обмотку ротора. При пуске, продолжительность которого составляет доли секунды, ток возрастает, как указывалось выше, в 5—6 раз. За это время обмотка электродвигателя не успеет перегреться, и пусковой ток для него не опасен. Однако большие толчки тока приводят к толчкам напряжения, что неблагоприятно сказывается на режиме работы других потребителей. В связи с этим принимают меры по ограничению пусковых токов асинхронных электродвигателей. В то же время эти двигатели, потребляя большие пусковые токи, развивают сравнительно небольшой вращающий момент. Цель применения искусственных схем пуска асинхронных двигателей — не только снизить пусковые токи, но и повысить пусковые моменты.
Пуск асинхронного электродвигателя с фазным ротором, т. е. ротором, имеющим контактные кольца, производится при помощи пускового реостата, включенного в цепь ротора. Введение реостата уменьшает пусковой ток и позволяет получить требуемый пусковой момент вплоть до критического.
Критическое скольжение, при котором момент имеет максимальное значение, зависит от активного сопротивления фазы ротора. Таким образом, подобрав соответственное сопротивление, можно получить необходимый момент.
Рис. 2. Пусковая диаграмма асинхронного электродвигателя
Рассмотренному способу пуска асинхронных электродвигателей с фазным ротором свойственны простота и надежность. Он позволяет снизить пусковой ток и повысить при необходимости пусковой момент вплоть до опрокидывающего момента. Недостатками данного способа следует считать значительные потери энергии в пусковых реостатах, а также их большие габариты при большом числе ступеней. Поскольку пусковые реостаты слишком громоздки, в крановых схемах часто применяют реостаты с так называемой несимметричной схемой, когда сопротивление выводится не одновременно из трех фаз роторной цепи, а постепенно.
В начальный момент пуска в роторную цепь электродвигателя введено все сопротивление. Затем постепенно, по мере разгона электродвигателя, с помощью барабанного или кулачкового контроллера выводится первая ступень сопротивления из цепи первой фазы, потом второй, затем третьей; при следующем положении контроллера выводится вторая ступень сопротивления из цепи первой фазы, и так до тех пор, пока при последнем положении контроллера не будет выведено все сопротивление и замкнута накоротко цепь ротора.
Такой способ пуска создает некоторую асимметрию токов роторной цепи, что, однако, опасности для электродвигателя не представляет и позволяет в то же время несколько уменьшить габариты пусковых реостатов и контроллеров.
Пуск мощных асинхронных электродвигателей с ко-роткозамкнутым ротором связан с рядом трудностей, так как ограничить пусковые токи, введя дополнительные сопротивления в цепь ротора, в данном случае невозможно. Как правило, в подъемно-транспортных машинах находят применение электродвигатели с коротко-замкнутым ротором сравнительно небольшой мощности, вследствие чего обычно не возникает необходимости ограничивать пусковые токи. При питании асинхронного электродвигателя с короткозамкнутым ротором от мощной сети пуск в большинстве случаев производится подключением обмотки статора к полному напряжению питающей сети.
Для привода крановых и вспомогательных металлургических механизмов, работающих в повторно-кратковременных или кратковременных режимах, применяют электродвигатели трехфазного тока серий МТ и МТК, а для эксплуатации при повышенной температуре окружающей среды созданы серии МТВ и МТКВ с теплостойкой стеклянной изоляцией. Их основным номинальным режимом является повторно-кратковременный с относительной продолжительностью включения ПВ = 25 %.
Электродвигатели серий МТ, МТК, МТВ и МТКВ рассчитаны на напряжения 220, 380 и 500 В и частоту 50 Гц, электродвигатели серии МТ с фазовым ротором — на синхронную частоту вращения 1000, 750 и 600 об/мин. Электродвигатели серии МТК короткозамкнутые, повышенного скольжения имеют одно- и двухскоростное исполнения. Синхронная частота вращения односкоростных двигателей серии МТ составляет 1000 и 750 об/мин.
Двухскоростные двигатели МТК предназначены для крановых механизмов, частоту вращения которых требуется регулировать. Последовательное соединение быстроходной и тихоходной обмоток в комбинации с резисторами дает возможность получить ряд искусственных характеристик двухскоростных электродвигателей. Они предназначены для работы в повторно-кратковременном режиме с частыми пусками и торможениями. Двухскоростные двигатели изготовляют с двумя независимыми обмотками на статоре на напряжение 220, 380 или 500 В.
Фазы быстроходных обмоток соединяют звездой или треугольником. От быстроходной обмотки в коробку выводов выведены три провода. Фазы тихоходных обмоток при всех напряжениях соединяют звездой, в коробку выводов выведены шесть проводов — начала и концы фаз.
Это дает возможность осуществлять последовательное соединение быстроходной и тихоходной обмоток для ограничения максимального генераторного момента при переходе с большой частоты вращения на малую, а также непрерывно питать двигатель при переходе с одной частоты вращения на другую. При последовательном соединении обеих обмоток необходимо, чтобы двигатель имел одно направление вращения при раздельной работе на каждой из обмоток.
Обозначения выводов обеих обмоток соответствуют одному направлению вращения при работе на различных частотах вращения. При включении в сеть одной из обмоток вторая обмотка может быть замкнута накоротко.
Кроме двигателей серии МТК с короткозамкнутым ротором разработана серия двухскоростных двигателей МТКМ, выполненных так же, как и односкоростные двигатели серии МТК, но с изоляцией класса Н. Эти электродвигатели выпускают только на одно напряжение (220, 380 или 500 В) без переключения со звезды на треугольник. В клеммную коробку выводятся от быстроходной обмотки три провода. Тихоходная обмотка рассчитана на соединение звездой при всех напряжениях. От тихоходной обмотки в коробку зажимов выводятся все шесть выводов обмотки (начала и концы фаз).
Рис. 3. Схемы включения в сеть двухскоростных электродвигателей серии МТК: а — при последовательном соединении обмоток; б — на большую скорость; в — на малую скорость
Рис. 4. Характеристики двухскоростного электродвигателя МТКВ 52-6/20
1- естественные; 2 — при последовательном соединении обмотки с шунтированием фаз быстроходной обмотки активным сопротивлением; 3 — при последовательном соединении; 2р — число пар полюсов
Последовательное соединение быстроходной и тихоходной обмоток в комбинации с сопротивлениями дает возможность получить ряд искусственных характеристик двухскоростного электродвигателя. Электродвигатели нормального исполнения 1—5-й величин имеют изоляцию класса А (типы МТ и МТК), электродвигатели 6-й и 7-й величин в металлургическом исполнении — изоляцию класса В (типы МТВ и МТКВ). Электродвигатели серий МТ и МТК обладают повышенной перегрузочной способностью и соответственно повышенной механической прочностью. Их можно присоединять к механизму посредством муфты или зубчатой передачи.
Станина и подшипниковые щиты чугунные. Аксиально расположенные ребра станины увеличивают площадь поверхности охлаждения электродвигателя и направляют поток охлаждающего воздуха вдоль нее.
Коробка выводов обмотки статора, расположенная на верхней части станины, имеет по одному отверстию с левой и правой сторон для ввода питающих кабелей. Неиспользуемое отверстие закрывают заглушкой. Выводные концы обмоток статора заканчиваются в клеммной коробке кабельными наконечниками.
В электродвигателях, рассчитанных на напряжения 220 и 380 В, для переключения с одного напряжения на другое выведены шесть концов обмотки статора. С внутренней стороны крышки коробки прикреплена табличка со схемой присоединения питающих проводов к двигателю.
Ввод проводов, идущих от обмоток ротора электродвигателей серии МТ, сделан с боковых сторон подшипникового щита. Провода присоединяются прямо к щеткодержателям. Подшипники электродвигателей 1—4Г-й величин шариковые, 5—7-й величин роликовые.
Пуск асинхронного двигателя с короткозамкнутым ротором производят прямым включением сетевого рубильника. При неподвижном роторе скорость пересечения его обмотки переменным магнитным полем равна !00 %, и поэтому ЭДС, индуктируемая в обмотке ротора, велика; отсюда велик и ток ротора, а следовательно, и ток статора, который во время пуска в пять-шесть раз превышает ток полной нагрузки. При таком большом токе быстрое нарастание вращающего момента вызовет механические удары.
Для уменьшения пускового тока и момента обмотку ротора делают разомкнутой, соединенной внутри машины звездой или треугольником. Концы обмотки присоединяют к контактным кольцам. При включении двигателя вводят в цепь ротора пусковое сопротивление, которое соответствует выбранным значениям тока и момента. Если момент двигателя превысит момент нагрузки, двигатель начнет вращаться, скольжение, ток и момент будут уменьшаться.
При неизменном сопротивлении в цепи ротора двигатель разгоняется до тех пор, пока момент, развиваемый им, не станет равным моменту нагрузки. После этого он будет вращаться с постоянной, но пониженной частотой вращения. Для дальнейшего разгона надо уменьшить сопротивление настолько, чтобы ток и момент вновь возросли до первоначального пускового значения. Таким последовательным уменьшением пускового сопротивления доводят частоту вращения двигателя до номинальной. Чем больше число пусковых ступеней, тем более плавно нарастает частота вращения.
Когда разгон закончен, обмотку ротора можно замкнуть накоротко, если двигатель будет работать продолжительно и не требуется регулировать его скорость. Для крановых двигателей такой режим неприемлем. Вслед за разгоном следуют отключение двигателя от сети, торможение и снова пуск.
При работе крана часто требуется снижать частоту вращения, увеличивая для этого скольжение ротора. Наиболее простым и удобным способом увеличения скольжения является включение регулировочного сопротивления в цепь ротора.
При добавочном сопротивлении ток ротора снизится и двигатель не сможет развить вращающий момент, необходимый для преодоления момента нагрузки. Чтобы увеличить ток в роторе при повышенном сопротивлении внешней цепи ротора, следует повысить ЭДС ротора, что позволит поддержать ток на прежнем уровне, а это произойдет автоматически за счет увеличения скольжения. При неизменной нагрузке на валу двигателя скольжение ротора примерно пропорционально сопротивлению цепи ротора. Увеличивая сопротивление роторной цепи в четыре раза, мы увеличиваем также и скольжение в четыре раза.
Для электродвигателей типа МТ 51-8 мощностью 22 кВт синхронная частота вращения составляет 750 об/мин, номинальная частота вращения при полной нагрузке — 723 об/мин и скольжение — 3 %. Повысив сопротивление роторной цепи в четыре раза, получим увеличение скольжения на 12 %, т. е. частота вращения этого двигателя будет равна 750 (1—12/100) = 660 об/мин. Отсюда видно, что, зная нагрузку электродвигателя, можно определить сопротивление цепи ротора, соответствующее заданной частоте вращения, которая всегда меньше синхронной.
Для регулирования частоты вращения кранового электродвигателя делают пять-шесть ступеней сопротивления, и тогда двигатель может работать не только по своей естественной характеристике, но и по любой из искусственных. Этот способ регулирования частоты вращения двигателя очень прост, но расход электроэнергии из сети будет таким, как если бы двигатель работал с полной мощностью.
Происходит это потому, что при неизменном моменте нагрузки мощность, потребляемая двигателем из сети, не изменится, а полезная мощность при этом тем меньше, чем меньше частота вращения.
Потери энергии расходуются на нагрев регулировочных сопротивлений. Ротора асинхронного двигателя с обмоткой достаточно для регулирования частоты вращения. Частоту вращения двигателя с короткозамкнутым ротором таким способом регулировать нельзя.
Для остановки электродвигателя отключают его от сети и, если частота вращения механизма мала и нет внешних сил, воздействующих на механизм, то под действием сил трения он быстро остановится. Однако чаще всего после отключения двигателя механизмы крана продолжают двигаться по инерции или под действием поднятого груза.
Согласно правилам безопасности требуется применять торможение для быстрой остановки крановых механизмов и удержания их в неподвижном состоянии после отключения двигателя. Торможение бывает механическим и электрическим. Механические тормоза обязательно предусматривают на каждом кране (см. гл. 2). На быстроходных кранах для быстрой остановки часто применяют электрическое торможение.
Наиболее простой способ электрического торможения— торможение противовключением. При этом делается реверс двигателя: он переключается для работы в противоположном направлении, хотя ротор продолжает вращаться в прежнем направлении против поля статора. Теперь скорость пересечения проводников ротора магнитным полем статора будет больше синхронной, скольжение превысит единицу, момент двигателя изменит направление и станет тормозным. Напряжение ротора в этом случае будет больше напряжения при неподвижном роторе, и поэтому ток и тормозной момент двигателя необходимо ограничить, включив большое сопротивление в цепь ротора. Как только механизм остановится, двигатель необходимо немедленно отключить от сети, иначе механизм начнет двигаться в противоположном направлении.
Торможение быстроходных тяжелых мостовых кранов производят одновременно электрическим и механическим тормозами.
Двигатель механизма подъема, совершая работу по подъему груза, часть энергии превращает в потенциальную энергию поднятого груза, которая перейдет в кинетическую при опускании груза. Чтобы опустить груз, не требуется включать двигатель; достаточно только освободить тормоз, и груз сам начнет опускаться, вращая механизм, а с ним и ротор двигателя. Теперь двигатель может быть генератором и должен отдать в сеть часть энергии опускающегося груза.
Если двигатель включить на опускание груза, то под воздействием груза частота вращения ротора увеличится, быстро достигнет синхронной и даже превысит ее. Скольжение двигателя станет отрицательным при сверхсинхронной частоте вращения, т. е. ротор будет вращаться быстрее магнитного поля статора, опережать его.
В обмотке ротора, обгоняющего магнитное поле, индуктируется ЭДС, пропорциональная скольжению, и возникает ток, если цепь замкнута. Ток ротора, взаимодействуя с магнитным полем статора, создает вращающий момент, направленный против момента, создаваемого грузом.
Если частота вращения двигателя настолько превысит синхронную, что момент двигателя уравновесит момент груза, увеличение частоты вращения прекратится. Чем больше масса груза и чем выше сопротивление цепи ротора, тем больше установившаяся частота вращения.
Вращаясь со сверхсинхронной частотой вращения, двигатель автоматически превращается в генератор и отдает часть электроэнергии в сеть. Особенность асинхронного двигателя переходить из двигательного режима в генераторный очень удобна для кранового механизма ввиду простоты и надежности этого способа управления. Экономия электроэнергии при опускании грузов обычно незначительна.
При спуске легкого груза или пустого крюка двигатель должен работать в сторону спуска, помогая грузу преодолевать сопротивление трения в механизме. При подъеме груза момент двигателя увеличивается за счет потерь на трение в механизмах, а при спуске полного груза эти потери снижают нагрузку двигателя на 30— 40 % момента, которым был нагружен двигатель при подъеме.
Для кранов с небольшой частотой вращения механизмов подъема спуск груза с торможением при сверхсинхронной частоте вращения двигателя вполне удовлетворяет условиям эксплуатации. Для быстроходных механизмов подъема, особенно при повышенной точности посадки груза, этот способ становится непригодным.
Рис. 5. Схема торможения однофазным питанием статора
При электрическом торможении двигателя со сверхсинхронной частотой вращения установившаяся частота вращения не может быть меньше синхронной, и для небольших перемещений или снижения частоты вращения перед остановкой приходится включать двигатель толчками, не давая ему развить полную частоту вращения. При этом способе управления быстроходными механизмами требуется высокая квалификация крановщика. Поскольку при таком виде торможения быстро изнашиваются двигатели и аппаратура, применяют нижесинхронное торможение.
Наиболее простой способ нижесинхронного торможения — противовключение, позволяющее значительно снизить скорость спуска тяжелого груза перед посадкой и разгрузить механический тормоз, которому придется сделать лишь часть тормозной работы. Этот способ торможения обладает двумя недостатками:
скорость спуска зависит от массы груза, и даже при небольшом изменении массы груза скорость его спуска значительно меняется;
если массы груза недостаточно, чтобы преодолеть момент двигателя, возможен подъем груза вместо спуска.
Эти недостатки усложняют такой способ управления и иногда создают определенную опасность.
Торможение противовключением наиболее пригодно для грейферных и магнитных кранов, быстроходные механизмы подъема которых требуется интенсивно тормозить. При этом отсутствуют указанные недостатки, так как масса груза на крюке, а также масса грейфера и магнита достаточно велика для того, чтобы при спуске не могло быть подъема.
Торможение двигателя при нижесинхронной частоте вращения можно получить способом динамического торможения постоянным током. Обмотка статора двигателя при этом питается постоянным током, а ротор замыкается на сопротивление. Постоянный ток создает неподвижное магнитное поле в статоре. Ротор, вращаясь в этом магнитном поле, индуктирует в своих обмотках ЭДС, а так как обмотки замкнуты на сопротивление, в цепи ротора пойдет ток и возникнет магнитное поле, которое создаст определенный тормозной момент. Чем выше частота вращения ротора, тем больше индуктированная ЭДС, а следовательно, и тормозной момент.
Способ динамического торможения постоянным током применяют редко из-за сложности электрооборудования, а также вследствие того, что нижесинхрониая частота вращения механизма спуска возможна только при тяжелых грузах.
Значительно проще осуществить торможение однофазным питанием статора. Обмотки статора для получения тормозного эффекта включаются по схеме, представленной на рис. 5. Ротор при этом способе также замыкается на сопротивление. Этот способ очень прост, но имеет и недостатки: повышенные ток и нагрев статора, а при малых массах грузов — неудовлетворительное регулирование.
Рекламные предложения:
Главная → Справочник → Статьи → Форум
Механизация земляных работ
Механизация строительства
Механизация дорожных работ
Автоматизация строительства
→ Бетонные работы
→ Мини-тракторы
 Разделы
Разделы
Строительные машины и оборудование
→ Для специальных земляных работ
→ Дорожно-строительные машины
→ Строительное оборудование
→ Асфальтоукладчики и катки
→ Большегрузные машины
→ Строительные машины, часть 2,
→ Дорожные машины, часть 2
→ Ремонтные машины
→ Ковшовые машины
→ Автогрейдеры
→ Экскаваторы
→ Бульдозеры
→ Скреперы
→ Грейдеры
Эксплуатация строительных машин
→ Эксплуатация средств механизации
→ Эксплуатация погрузочных машин
→ Эксплуатация паровых машин
→ Эксплуатация экскаваторов
→ Эксплуатация подъемников
→ Эксплуатация кранов перегружателей
→ Эксплуатация кузовов машин
→ Крановщикам и стропальщикам
Ремонт строительных машин
Ремонт дорожных машин
Ремонт лесозаготовительных машин
Ремонт автомобилей КАмаЗ
Техническое обслуживание автомобилей
Очистка автомобилей при ремонте
Материалы и шины
Остались вопросы по теме:
"Крановые электродвигатели трехфазного тока"
— воспользуйтесь поиском.
→ Машины городского хозяйства
→ Естественная история машин
→ Транспортная психология
→ Пожарные автомобили
→ Автомобили-рефрижераторы
→ Монтаж и эксплуатация лифтов
→ Тракторы