Строй-Техника.ру
Строительные машины и оборудование, справочник
Типовые технологические схемы комплексной механизации погрузочно-разгрузочных работ в силу традиционных технологических решений не используют промышленные роботы и манипуляторы. Однако при рассмотрении комплексно-механизированных и автоматизированных складов упоминается об использовании робототехнических систем.
В современных транспортно-складских комплексах широко используют тележки с автоматическим направлением движения. Часто они оборудуются перегрузочными манипуляторами. Это позволяет не только перемещать грузы по заданному маршруту к определенным рабочим позициям, но и перегружать их. Наибольшее распространение получили тележки с индуктивным управлением (ТИУ)- Под полом склада в специальной траншее прокладывают управляющий кабель, по которому подают с определенной частотой импульсы электрического тока. Вокруг управляющего кабеля возникает магнитное поле, которое взаимодействует с электромагнитными катушками, расположенными на тележках. Последние соединены с управляющим механизмом тележек. Однако ТИУ обладают существенными недостатками: большие затраты на прокладку кабеля, на высокочастотный генератор и другое оборудование, возможны помехи от других электромагнитных полей.
Предпочтение отдают другим направляющим системам для тележек. К ним относятся инерционные, оптические, лазерные, ренер-ные и др. Инерционные направляющие системы основаны на применении гироскопа. Любое отклонение от установленного пути движения создает ускорение, направленное перпендикулярно этому пути, что воспринимается гироскопом и преобразуется в корректирующее действие сервомеханизма системы управления.
Рекламные предложения на основе ваших интересов:
Дополнительные материалы по теме:
В оптических и лазерных направляющих устройствах по маршруту движения тележек укладывается специальная лента или наносится краской полоса. На тележке устанавливают излучатель ультрафиолетовых лучей или лазер, направленный на ленту. Различное по спектру отражение считывается и преобразуется в сигналы управления направлением движения тележки. В ренерных направляющих системах предусмотрено использование набора нескольких широких и узких полос из краски или установка в определенных местах маяков базового положения. В запоминающем устройстве бортового компьютера на тележке заложены коды набора полос или карта размещения маяков. Это позволяет автоматически изменять направления и маршруты движения тележек.
Транспортные рельсовые тележки с автоматизированным управлением, разработанные ВИАС, получили название трансроботы. Они выполнены в виде четырехколесных тележек, перемещаемых по рельсовому пути и снабженных перегрузочным устройством.
В автоматизированных складах для транспортирования и накопления тарно-штучных грузов используют конвейеры. По сравнению с грузовыми тележками они имеют фиксированную трассу транспортирования грузов. Перестановка их требует значительных материальных и трудовых затрат.
Тарно-штучные грузы, перевозимые мелкими повагонными отправками и контейнерами, являются наиболее массовыми на железнодорожном транспорте. Однако погрузочно-разгрузочные работы с ними мало механизированы. Для этих целей во ВНИИЖТе разработан монорельсовый загрузочный манипулятор ММЗ-1 грузоподъемностью 1 т. Он предназначен для загрузки и разгрузки бортовых автомобилей одиночными грузами и пакетами на поддонах. В кузове автомобиля их располагают в два ряда по ширине и в два яруса по высоте. Он может быть оснащен различными грузозахватными приспособлениями в зависимости от вида груза.
В Ленинградском институте инженеров железнодорожного транс^ порта разработан манипулятор с трехчелюстным захватом, предназначенный для выгрузки из рефрижераторных вагонов мороженых полутуш длиной до 2,5 м. Он снабжен механизмом передвижения шагающего типа.
Для загрузки и разгрузки конвейерных систем в складах, подачи, порожних поддонов, тары, оберточных и упаковочных материалов можно использовать транспортный робот «Спрут-1». Он состоит из двух манипуляторов (Mi и М2), транспортной рельсовой трассы (Трс) и устройства управления. Последнее имеет пульт оператора (П0п), с помощью которого задается программа робота. Она включает адреса, между которыми необходимо произвести транспортную операцию, и режим работы механизмов робота. Программный блок (БП) обеспечивает автоматическое выполнение роботами транспортных операций с перемещением по кратчайшему пути. Блок связи (БС) осуществляет передачу команд роботу и прием от него сигналов по бесконтактной линии связи. Грузоподъемность манипулятора 250 кг, скорость передвижения 0,5 м/с, скорость подъема и опускания 0,26 м/с.
Транспортный робот МАК-1-50 используют для укладки грузов на поддоны при пакетировании, для передачи грузов с конвейеров на тележки и другие транспортные средства. Кинематическая схема робота реализует следующие перемещения (показано стрелками): 1 — вдоль конвейера; 2 — тележки с манипулятором по направляющим перпендикулярно к трассе конвейера; 3 — поворот манипулятора в вертикальной плоскости; 4 — замыкание захвата; 5 — подъем и опускание колонны.
Механизм передвижения робота состоит из гидромотора и одноступенчатого зубчатого цилиндрического редуктора, на выходном валу которого закреплена звездочка. Она сцепляется с втулочно-роликовой цепью, неподвижно закрепленной вдоль конвейера. Манипулятор выполнен в виде поворотного рычага с двумя зубьями на конце. Передний зуб рычага жесткий, а задний подвижной по типу обратной защелки. Поворот рычага осуществляют гидроцилиндром. Подъем и опускание колонны от гидроцилиндра осуществляют через цепной полиспаст. Механизм передвижения тележки аналогичен механизму передвижения робота. Управление роботом ручное или автоматическое с помощью управляющей машины МЦК-МЧ 3/3.
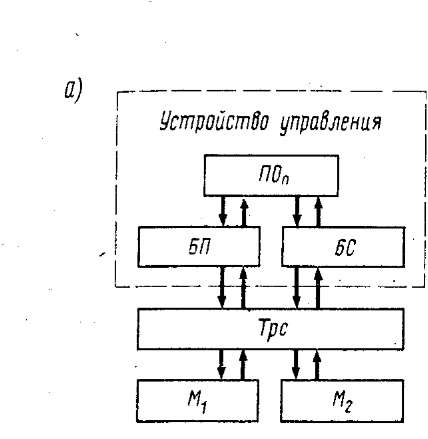
Рис. 1. Транспортный робот «Спрут-1»:
а — структурная схема б — конструкция манипулятора
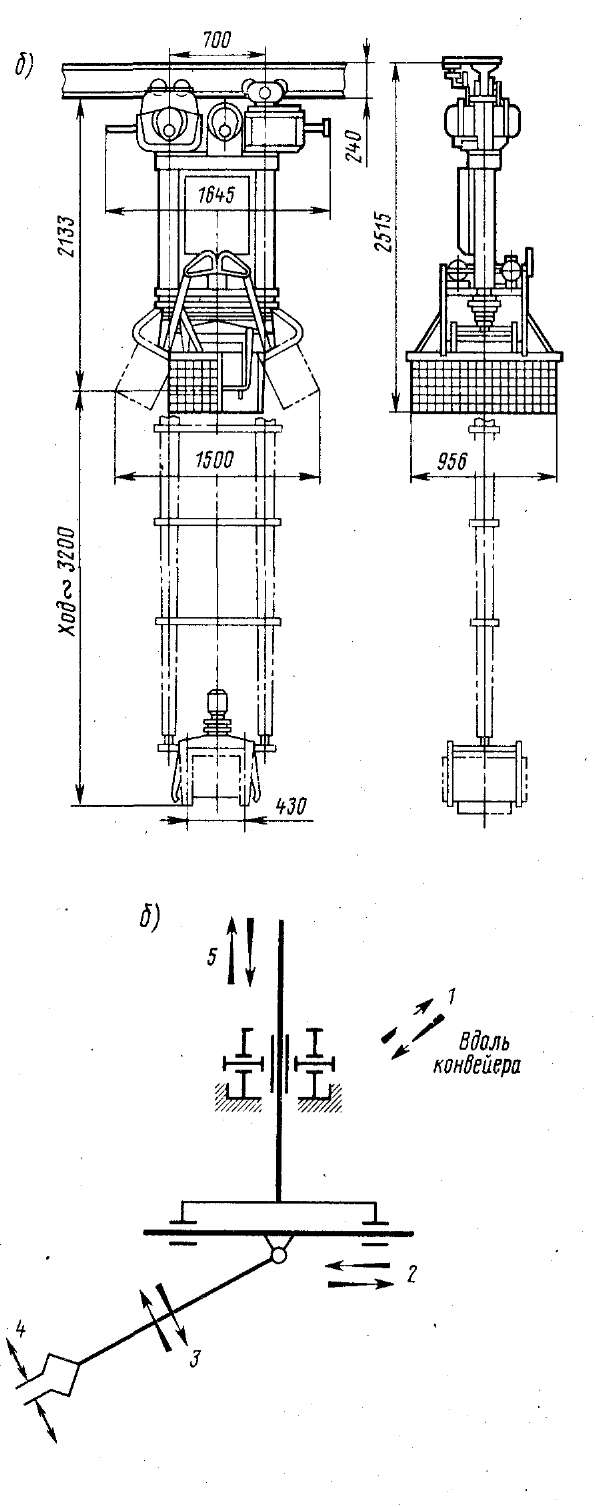
Рис. 2. Транспортный робот МАК-1-50:
а—конструкция; б—кинематическая схема
В автоматизированных складах для передачи грузов с одного подвесного конвейера на другой применяют транспортный робот МАК-2. У него манипулятор с грузозахватным устройством поворачивается вдоль оси конвейера и на боковые стороны. Гидроприводы механизмов поворота манипулятора и передвижения робота снабжены гидрораспределителями, обеспечивающими точную фиксацию их в промежуточных положениях.
Для выгрузки из крытых вагонов бочек и других штучных грузов применяют манипуляторы с ручным управлением. На прямоугольной раме установлена поворотная платформа с шарнир-но-сочлененной телескопической рукоятью, на конце которой расположен клещевой захват. Сиденье оператора размещено на поворотной платформе рядом с подъемной рукоятью (манипулятором). Управляющая рукоятка представляет собой механизм, кинематически подобный исполнительному манипулятору, и связан с ним следящими приводами. Манипулятор переносной. Его устанавливают вилочным погрузчиком в дверной проем вагона. Манипулятор укладывает бочки из вагона на поддон в два яруса, а затем пакет на поддоне вилочным погрузчиком перемещается в склад или автотранспортное средство.
При пакетировании грузов на поддонах внутри складов применяют передвижные манипуляторы с органами управления, расположенными непосредственно на захватном устройстве. Крестообразная сварная рама опирается на четыре колесика рояльного типа. На раме установлена поворотная телескопическая колонна, на которой закреплен манипулятор с двумя ведущими шарнирами. Один из них расположен в вертикальном пазу и снабжен электрическим, гидравлическим или пневматическим приводом. Второй шарнир расположен в горизонтальном пазу. Неподвижность его при отсутствии усилия со стороны оператора обеспечивает балансир-ное устройство пружинного или другого типа. Орган управления размещен непосредственно вблизи вакуумного или другого грузозахватного устройства. Он имеет две степени подвижности, поворачиваясь вокруг горизонтальной оси вверх и вниз на угол до 30°. Рукоятка подпружинена и автоматически возвращается в исходное горизонтальное положение. Движение рукоятки вверх и вниз соответствует подъему и опусканию груза. Угол наклона рукоятки соответствует задаваемой скорости вертикального передвижения. Вращение вокруг вертикальном оси и радиальные перемещения груза осуществляются усилием оператора, управляющего оператором. Так как все элементы манипулятора уравновешены, усилие на перемещение груза массой 100 кг в горизонтальной плоскости не превышает 50…70 Н. Расположение рукоятки управления вблизи захвата ускоряет укладку грузов на поддон и повышает точность их размещения в пакете. Преимущества: меньше времени на вспомогательные операции, руки оператора освобождены для свободного позиционирования, плавного перемещения и пространственной ориентации грузов. Однако они имеют недостатки: ограниченная грузоподъемность (до 500 кг) и дальность перемещения грузов.
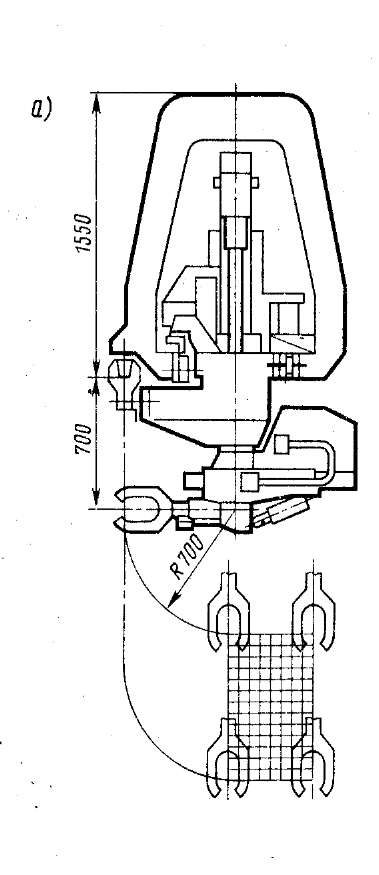
Рис. 3. Транспортный робот МАК-2
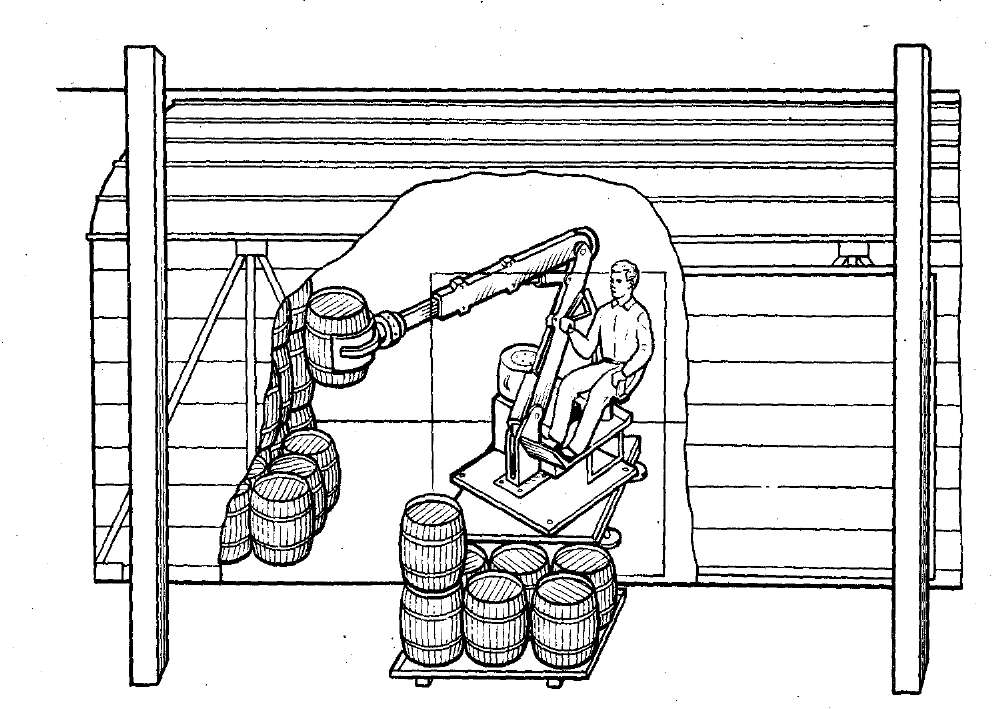
Рис. 4. Переносной манипулятор с ручным управлением
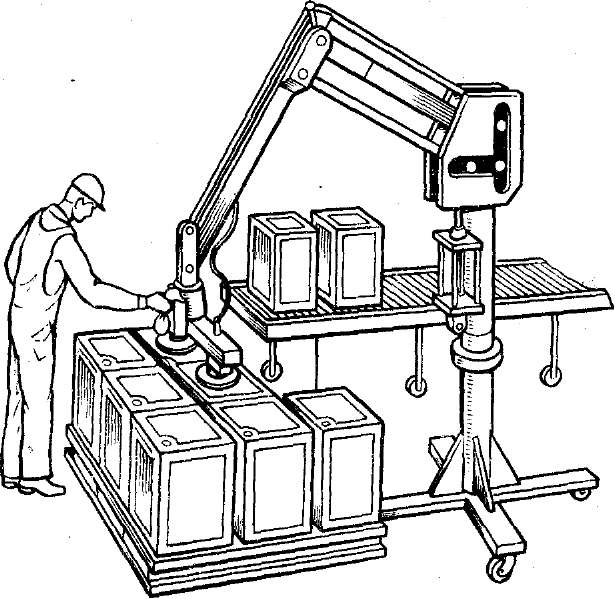
Рис. 5. Манипулятор с органами управления на грузозахватном устройстве
Рекламные предложения:
Главная → Справочник → Статьи → Форум
Механизация земляных работ
Механизация строительства
Механизация дорожных работ
Автоматизация строительства
→ Бетонные работы
→ Мини-тракторы
 Разделы
Разделы
Строительные машины и оборудование
→ Для специальных земляных работ
→ Дорожно-строительные машины
→ Строительное оборудование
→ Асфальтоукладчики и катки
→ Большегрузные машины
→ Строительные машины, часть 2,
→ Дорожные машины, часть 2
→ Ремонтные машины
→ Ковшовые машины
→ Автогрейдеры
→ Экскаваторы
→ Бульдозеры
→ Скреперы
→ Грейдеры
Эксплуатация строительных машин
→ Эксплуатация средств механизации
→ Эксплуатация погрузочных машин
→ Эксплуатация паровых машин
→ Эксплуатация экскаваторов
→ Эксплуатация подъемников
→ Эксплуатация кранов перегружателей
→ Эксплуатация кузовов машин
→ Крановщикам и стропальщикам
Ремонт строительных машин
Ремонт дорожных машин
Ремонт лесозаготовительных машин
Ремонт автомобилей КАмаЗ
Техническое обслуживание автомобилей
Очистка автомобилей при ремонте
Материалы и шины
Остались вопросы по теме:
"Роботы и манипуляторы для перегрузочных работ"
— воспользуйтесь поиском.
→ Машины городского хозяйства
→ Естественная история машин
→ Транспортная психология
→ Пожарные автомобили
→ Автомобили-рефрижераторы
→ Монтаж и эксплуатация лифтов
→ Тракторы