Строй-Техника.ру
Строительные машины и оборудование, справочник
Для управления двигателями постоянного тока, установленными на механизмах передвижения, применяют контакторную схему П. На рис. 124 изображена элементная схема управления типа П, а на рис. 2 —схема включения двигателя при управлении по этой схеме.
В первом положении последовательно с обмоткой якоря включено все сопротивление PI — Р5. Момент двигателя в первом положении составляет около 50% номинального момента, поэтому следует иметь в виду, что тяжело нагруженные кран или тележка могут в первом положении контакторной схемы не сдвинуться с места.
Во втором положении выводится сопротивление PI — Р2, увеличиваются напряжение на якоре двигателя и вращающий момент двигателя.
Рекламные предложения на основе ваших интересов:
Дополнительные материалы по теме:
В третьем положении один за другим с помощью реле времени автоматически выводятся сопротивления Р2 — РЗ, РЗ — Р4, Р4 — Р5. После того как все сопротивления будут выведены, двигатель начнет вращаться с максимальной скоростью. При движении Назад последовательность вывода сопротивлений такая же, как и при движении Вперед.
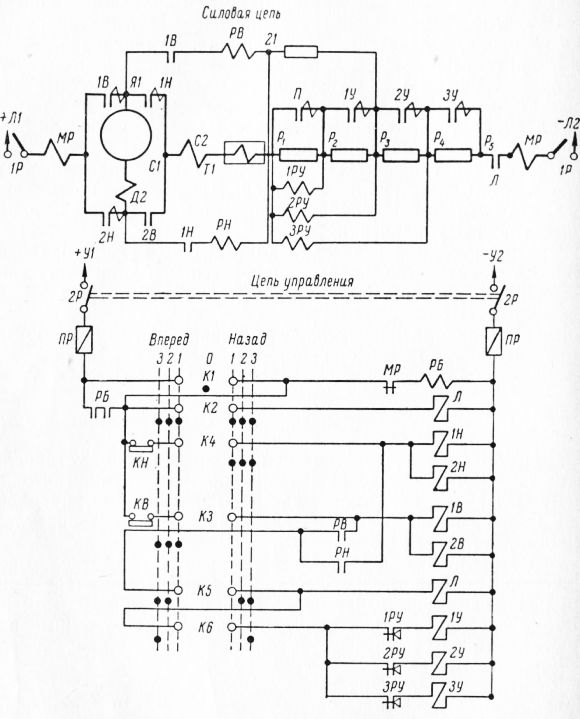
Рис. 1. Элементная схема управления типа П
В схеме П предусмотрено торможение противовключением. При переводе рукоятки командоконтроллера из любого положения Вперед в любое положение Назад ступень сопротивления PI — Р2 не будет выведена до тех пор, пока двигатель не остановится, после чего начнется нормальный пуск двигателя. Вывод и ввод сопротивления PI — Р2 при торможении двигателя осуществляется автоматически при помощи реле противовключения РВ и РН. Эти реле замыкают свои контакты в цепи катушек реверсивных контакторов, когда скорость двигателя близка к нулю. С этого момента начинается разгон двигателя в обратную сторону.
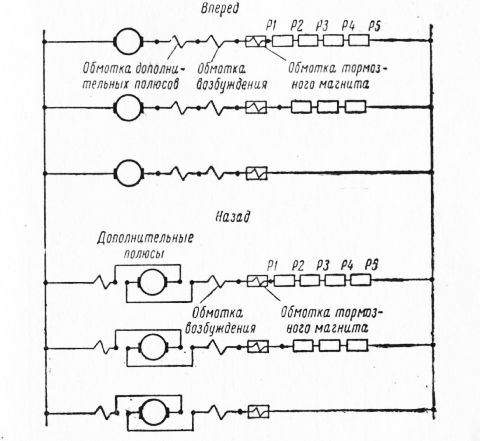
Рис. 2. Схема включения двигателя при управлении по схеме типа П
Реле ускорения 1РУ, 2РУ, ЗРУ служат для создания выдержек времени между включением контакторов Я, 1У, 2У, ЗУ и обеспечивают определенную последовательность их включения. Таким образом, благодаря реле противовключения реле ускорения, торможение ,и запуск двигателя, управляемого по схеме П, полностью автоматизированы, что дает возможность избежать больших толчков тока при быстром переводе рукоятки ко-мандо-контроллера из третьего положения Вперед в третье положение Назад.
Контакторная схема типа ДП предназначена для управления Двухдвигательными приводами и представляет собой сдвоенную схему П.
Для управления двигателями постоянного тока механизмов подъема служит схема контакторного управления типа ПС. На рис. 3 приведена элементарная схема типа ПС, а на рис. 4 — схема включения двигателя при управлении по этой схеме.
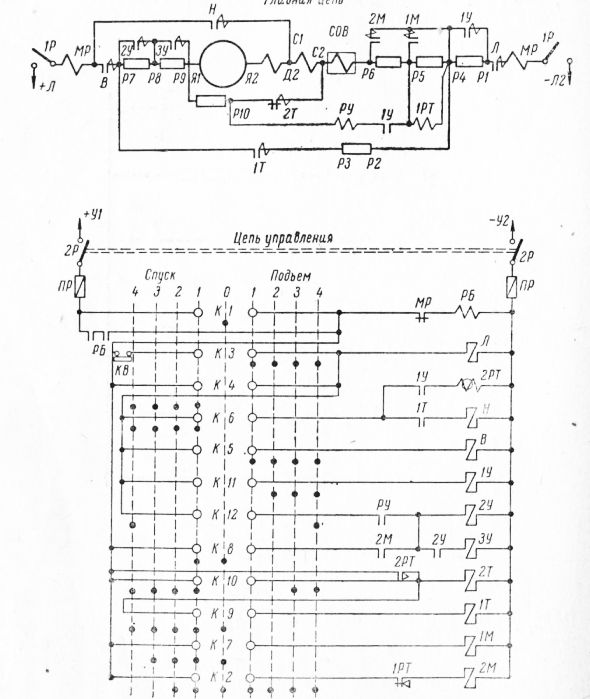
Рис. 3. Элементная схема управления типа ПС
В нулевом положении командоконтроллера якорь двигателя вместе с последовательно включенной обмоткой возбуждения замкнут при помощи нормально закрытого контакта контактора 2Т на сопротивление Р9 — Р10. (Этим создается контур динамического торможения.)
Динамическое торможение позволяет в случае поломки механического тормоза и отсутствия напряжения на кране спустить даже тяжелый груз с безопасной скоростью: для этого необходимо лишь поставить командоконтроллер в нулевое положение.
В первом и втором положениях подъема параллельно якорю двигателя и последовательной обмотке возбуждения, включенным последовательно, включено сопротивление Р9—Р10, что обеспечивает малые скорости подъема легких грузов.
Во втором положении скорость вращения двигателя будет больше за счет вывода сопротивления Р4 — Р1, включенного последовательно с якорем.
В третьем и четвертом положениях подъема скорость двигателя увеличивается вследствие повышения напряжения на двигателе. При этом в четвертом положении скорость увеличивается в две ступени и переход из положения подъема 4А в положение подъема 4Б происходит автоматически.
Длительность работы двигателя в положении 4А определяется собственным временем работы контактора ЗУ (0,2— 0,3 сек).
В четвертом положении двигатель работает с максимальной скоростью.
Во всех положениях спуска обмотка возбуждения двигателя включена параллельно с якорем двигателя. Это необходимо для получения таких характеристик двигателя, которые обеспечили бы двигательный режим при спуске легких грузов, когда груз не может преодолеть сил трения в механизме, и тормозной режим при спуске тяжелых грузов.
В первом положении спуска ток, протекающий через обмотки двигателя, ограничивается сопротивлением PI — Р4 в общей Цепи и сопротивлением РЗ — Р2, включенным последовательно в цепь якоря.
Во втором положении командоконтроллера размыкаются контакты контакторов ускорения 2У и ЗУ, вводя в цепь якоря сопротивление Р7 — Р8 — Р9. Введение этого сопротивления уменьшает вращающий момент двигателя. Поэтому при опускании грузов, вес которых недостаточен для преодоления сил трения в механизме при переходе из первого положения спуска во второе, скорость движения уменьшается. В случае опускания тяжелых грузов, когда двигатель работает в тормозном режиме, скорость движения груза при переходе из первого положения спуска во второе возрастает.
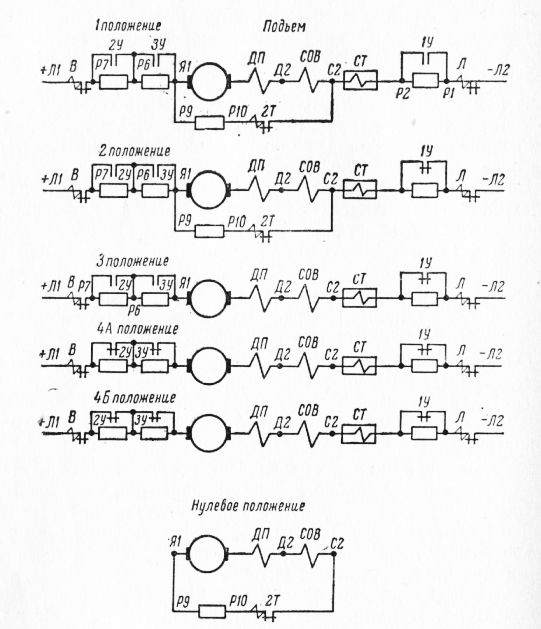
Рис. 5. Схема включения двигателя при управлении по схеме ПО
Скорость опускания груза при постановке командоконтроллера в четвертое положение спуска увеличивается автоматически в три ступени.
Вторая ступень (положение 4Б)—по мере разгона двигателя растет напряжение на его якоре и после достижения на нем определенной величины напряжения при помощи реле напряжения РУ, не показанного на схеме, включается контактор 2У, выводящий сопротивление Р7—Р8, вследствие чего повышается напряжение на якоре двигателя.
Третья ступень (положение 4)—контактор ЗУ автоматически включается и выводит сопротивление Р8 — Р9.
В четвертом положении командоконтроллера груз опускается с максимальной скоростью.
При быстром переводе командоконтроллера из четвертого положения спуска в нулевое положение создается схема, соответствующая первой ступени динамического торможения, обмотка возбуждения двигателя и обмотка тормозного магнита через сопротивления Р7 — Р8 — Р9 — Р2 — РЗ и Р5 — Р6 включены последовательно с обмоткой якоря двигателя (нормально открытый контакт контактора 1Т замкнут, нормально закрытый контакт контактора 2Т разомкнут; механический тормоз разомкнут).
Как видно из элементной схемы ПС при переводе из 4-го положения спуска в нулевое положение замыкается контактор 1М, следовательно, теряет питание катушка тормозного реле 1 рт. Это реле с выдержкой времени 0,5 сек замыкает свои контакты в цепи катушки контактора 2’М. Контактор 2Мг замыкая свои контакты, шунтирует сопротивление Р5 — Р6У уменьшая этим сопротивление в контуре динамического торможения,— наступает вторая ступень динамического торможения. Механический тормоз при этом разомкнут, так как обмотку тормозного магнита обтекает ток. Кроме того, при постановке командоконтроллера в пулевое положение обесточивается катушка реле 2рт, которое через 0,75 сек разрывает свои контакты в цепи катушки контактора 2Т, который, замыкая свои нормально замкнутые контакты, .создает контур динамического торможения якорь— обмотка возбуждения — сопротивление Р9 — Р10. Наступает третья ступень динамического торможения, при этом двигатель тормозится как электрически, так и механически, так как ток не протекает через обмотку тормоза. Механический тормоз замкнут.
При использовании тормозного электромагнита параллельного включения его обмотка получает питание через контакты специального контактора, катушка которого включается через’ контакты командоконтроллера.
Для управления двухдвигательными приводами используют схему ДПС, которая представляет собой две панели ПС с одним общим управлением.
Для управления трехфазными асинхронными двигателями с фазовым ротором, установленными на механизмах передвижения, применяют схему контакторного управления типа Т, имеющую 6 положений Вперед и 6 положений Назад. Элементная схема этой панели приведена на рис. 6. Ограничение пусковых токов и регулирование скорости достигают в схеме введением сопротивления в цепь ротора.
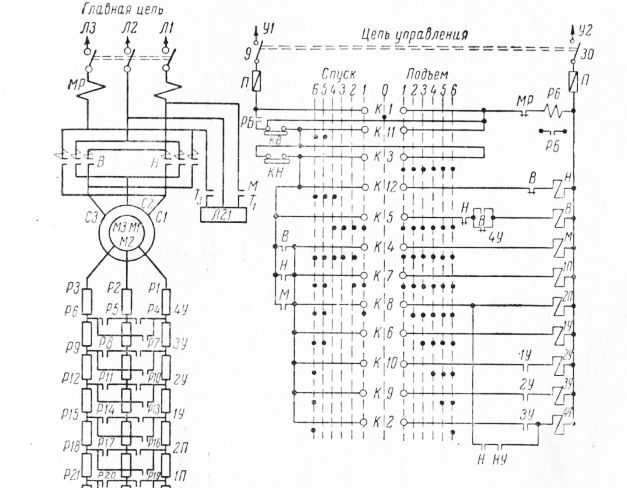
Рис. 6. Элементная схема управления типа Т
Схема типа Т допускает торможение противовключением, но следует помнить, что протекание процессов пуска и торможения в схеме типа Т не автоматизировано, поэтому во избежание больших толчков тока пуска и торможения рукоятку командоконтроллера нужно переводить, останавливаясь на каждом положении.
В первом положении командоконтроллера момент двигателя равен 50% номинального.
Рекламные предложения:
Главная → Справочник → Статьи → Форум
Механизация земляных работ
Механизация строительства
Механизация дорожных работ
Автоматизация строительства
→ Бетонные работы
→ Мини-тракторы
 Разделы
Разделы
Строительные машины и оборудование
→ Для специальных земляных работ
→ Дорожно-строительные машины
→ Строительное оборудование
→ Асфальтоукладчики и катки
→ Большегрузные машины
→ Строительные машины, часть 2,
→ Дорожные машины, часть 2
→ Ремонтные машины
→ Ковшовые машины
→ Автогрейдеры
→ Экскаваторы
→ Бульдозеры
→ Скреперы
→ Грейдеры
Эксплуатация строительных машин
→ Эксплуатация средств механизации
→ Эксплуатация погрузочных машин
→ Эксплуатация паровых машин
→ Эксплуатация экскаваторов
→ Эксплуатация подъемников
→ Эксплуатация кранов перегружателей
→ Эксплуатация кузовов машин
→ Крановщикам и стропальщикам
Ремонт строительных машин
Ремонт дорожных машин
Ремонт лесозаготовительных машин
Ремонт автомобилей КАмаЗ
Техническое обслуживание автомобилей
Очистка автомобилей при ремонте
Материалы и шины
Остались вопросы по теме:
"Схемы постоянного тока кранов"
— воспользуйтесь поиском.
→ Машины городского хозяйства
→ Естественная история машин
→ Транспортная психология
→ Пожарные автомобили
→ Автомобили-рефрижераторы
→ Монтаж и эксплуатация лифтов
→ Тракторы