Строй-Техника.ру
Строительные машины и оборудование, справочник
Машины напольного транспорта должны иметь высокую маневренность. Это означает, что радиус поворота должен быть минимальным. Управление этими машинами можно осуществить тремя способами:
— рулем и рулевым механизмом;
— рычагами (ручное управление);
— ножным управлением (наклоняется платформа, на которой стоит водитель).
Достижение высокой маневренности является основной трудностью при создании устройства управления. Оно должно обладать компактностью конструкции, кинематической точностью, простотой обслуживания, а также другим специфическим требованиям.
Кинематика управления должна быть особо точной, поскольку машина с меньшим радиусом поворота имеет большую стоимость.
Рекламные предложения на основе ваших интересов:
Дополнительные материалы по теме:
В связи с тем что для достижения высокой маневренности необходимо часто приводить в действие устройство управления, усилия при повороте руля должны быть минимальными. Для этого чаще всего встраивают гидросервоусилители, особенно в машинах с большой грузоподъемностью.
При рассмотрении тормозного устройства показаны устройства управления и торможения машин, управляемых с пола. Управление здесь упрощено, так как с помощью рычага можно повернуть управляющую и ведущую колонну в нужную сторону.
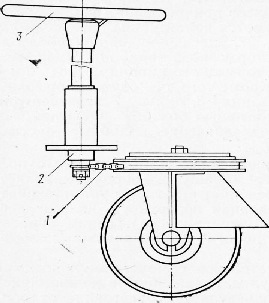
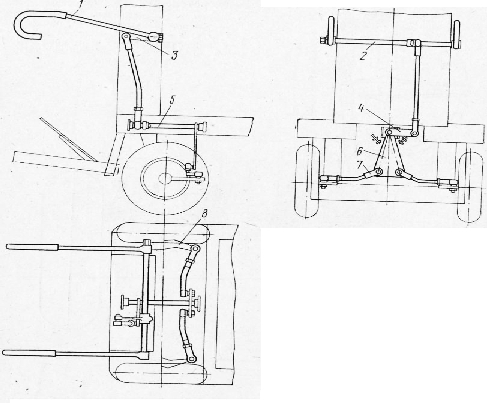
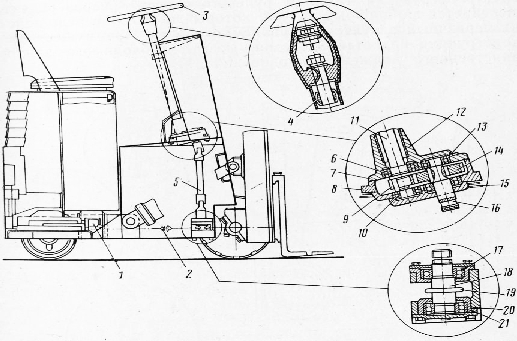
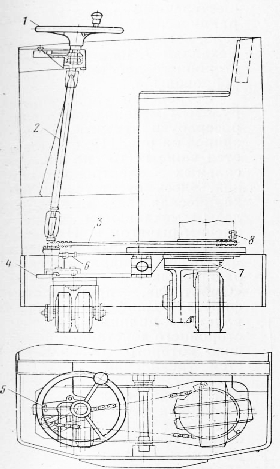
Устройство управления электротягачей состоит из руля, рулевого механизма и передающей цепи.
Рулевой механизм прикреплен к шасси ригелем, в котором с помощью шарикоподшипников присоединен вал. На верхнем конце вала шпонкой прикреплен руль и прижат гайкой. К нижнему концу присоединена звездочка с передающей Цепью. На кронштейне, смонтированном на рулевом механизме, находится рычаг реверсора.
Поворот руля передается через рулевой механизм и звездочку с передаточным отношением 1:4,2 к переднему колесу. Переднее колесо встроено в колонну, закрепленную в опорах на наклонной балке шасси. Таким образом, получается стабилизирующий момент и при отпускании руля управляемое колесо выравнивается.
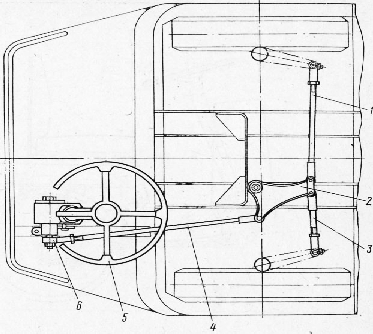
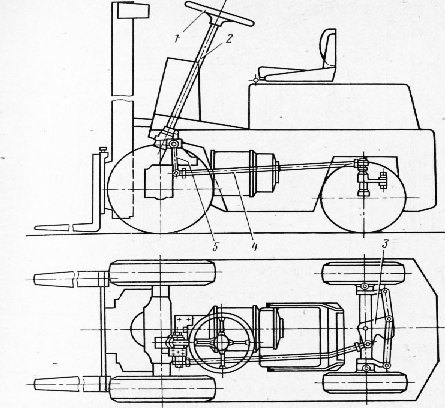
Устройство управления четырехопорного электротягача состоит из руля с рулевым механизмом типа ГАЗ-51, рычага, тяг, плиты и рычагов поворотного кулака.
От руля движение передается рычагу, тяге и плите, которая может поворачиваться вокруг неподвижной оси. Вращение плиты
зависит от поворота руля, и с помощью тяг и рычагов поворотного кулака осуществляется поворот электротягача направо и налево.
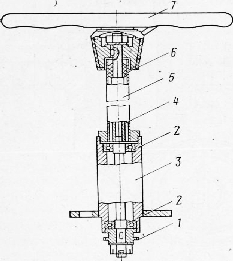
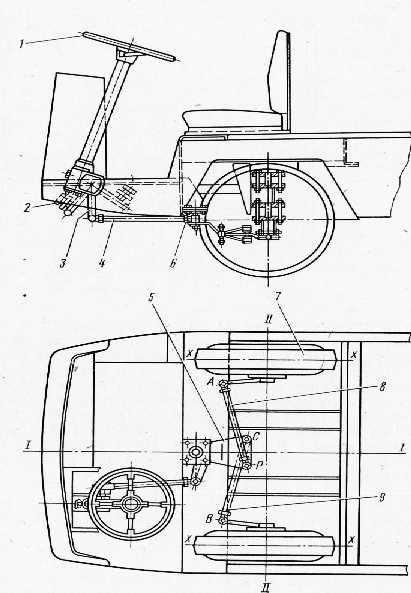
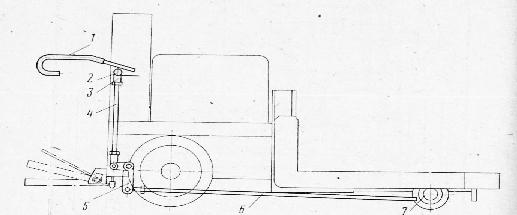
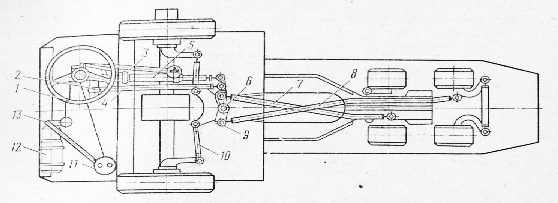
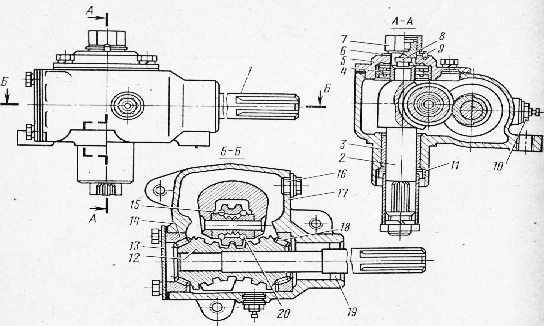
Устройство управления электротележек состоит из руля, рулевого механизма автомобиля ГАЗ-51, рычага со шлицевым отверстием продольной тяги, плиты и поперечных тяг, смонтированных на поворотных кулаках.
С помощью шпонки и гайки рулевое колесо прикрепляется к верхнему концу полого передающего вала. На нижнем конце этого же вала насажен глобоидальный червяк, опорами которого в картере рулевого механизма служат конические роликовые подшипники. Подшипником для крепления верхнего конца вала служит текстолитовая втулка, насаженная на трубу. Подшипники прижаты крышкой. С глобоидальным червяком зацепляется ролик, смонтированный на валу. Опорами вала служат бронзовая втулка и роликовый подшипник, который прижат крышкой. Резиновая прокладка сжимается пружиной и предохраняет масло от утечки из картера. Среднее передаточное отношение рулевого устройства равно 1:18,2.
При вращении рулевого колеса влево и вправо глобоидальный червяк перемещает вверх или вниз ролик, который поворачивает вал 10 со шлицевым концом и посредством его рычаг со шлицевым отверстием. Продольная тяга, плита и поперечные тяги соединены шарнирно, и с их помощью меняется положение управляемых колес.
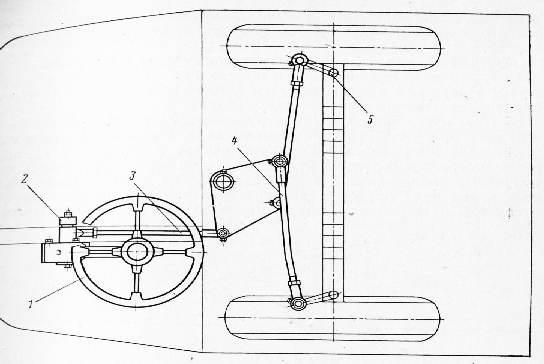
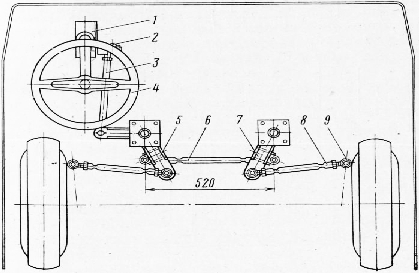
На рис. 5 показан поворот управляемых колес, осуществляемый с помощью рулевого механизма (типа ГАЗ-51), рычага 6 со шлицевым отверстием, продольной тяги, плиты и поперечных тяг, концы которых рычагами соединены с поворотными кулаками управляемых колес. Все тяги соединены между собой сферическими шарнирами.
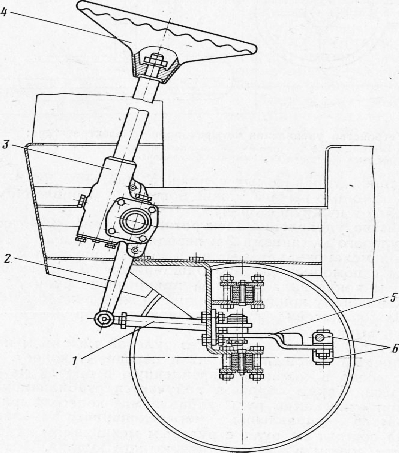
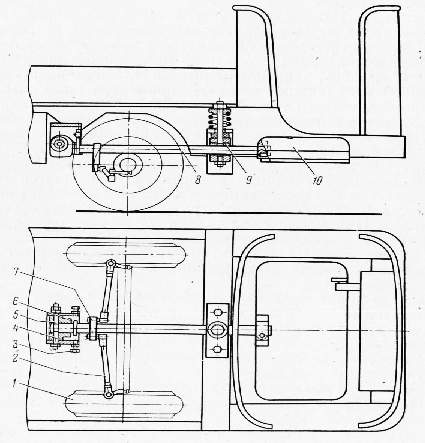
На рис. 6 показано устройство управления, подобное рассмотренным ранее. Среднее передаточное число рулевого механизма равно 1:20,5. Плита закреплена на опоре с помощью Двух игольчатых подшипников. Опора 6 прикреплена к шасси.
Устройство управления электротележки, показанное на рис. 7, состоит из руля, рулевого механизма, рычага со шлицевым отверстием, продольной тяги, поперечной тяги, поперечных тяг и опор.
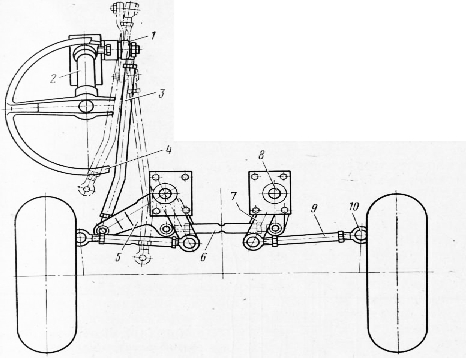
Поворот управляемых колес у устройства, изображенного, осуществляется так же, как и у рассмотренных уже устройств.
Поперечная тяга разделена на две части, внутренние концы которых соединены шарнирно с плитами. Плиты соединены между собой с помощью тяги.
При повороте рулевого колеса с помощью рычага и тяги движение передается плите, которая поворачивается вокруг неподвижной оси опоры. Тягой движение передается правой опоре; приводятся в движение тяги и рычаги, поворачивающие управляемые колеса.
На рис. 9 и 10 показаны устройства с рычажным управлением. Управление осуществляется передвижением рычагов вверх или вниз, что соответствует правому или левому повороту.
На обоих концах вала, проходящего через управляющую коробку, закреплены рычаги. С помощью вилки, закрепленной неподвижно к валу, промежуточного рычага и планки промежуточного вала вращательное движение передается плите, приваренной к промежуточному валу. Вращательное движение передается тягам, концы которых прикреплены к поворотным кулакам колес.
На рис. 11 показано устройство управления электротележки. Площадка, смонтированная в передней части шасси тележки, поворачивает вал, закрепленный к шасси с помощью пружинного устройства (пружину можно регулировать в зависимости от веса водителя). При наклоне площадки влево или вправо вал поворачивает управляемые колеса.
Этот способ управления нельзя применять при неровной дороге и больших скоростях из-за нестабильного горизонтального положения водителя.
Устройство управления электротележки с низким подъемом. При повороте руля отклоняется шлицевой рычаг, вытягивающий продольную тягу. Тяга и рычаг соединены с одним из управляемых колес вилкой. Радиус поворота определяется ограничением углового хода шлицевого рычага посредством регулирующих болтов.
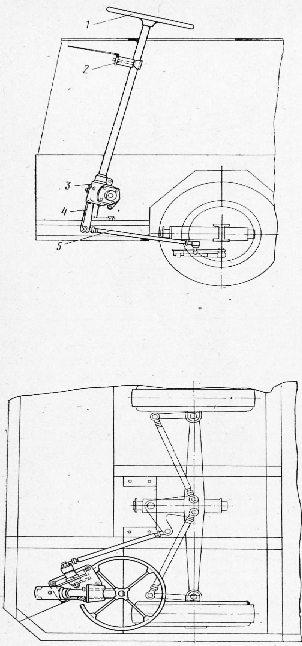
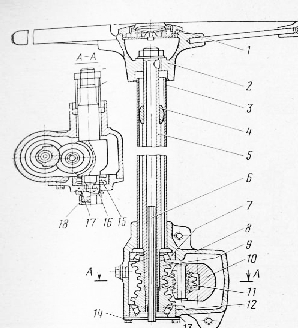
Устройство управления трехопорного электропогрузчика состоит из рулевого механизма, вала с шарнирами, передаточного вала и цепи.
В корпусе смонтирована передача, состоящая из двух зубчатых колес, опорами которых служат шариковые подшипники. В крышку корпуса вставлена труба, через которую проходит вал. Нижний конец вала сцеплен клином с малым зубчатым колесом 9, а опорой верхнего конца служит втулко-вый подшипник. На конусном конце штыря клином и гайкой закреплен руль.
Между фланцами корпуса и шасси поставлены регулировочные пластины.
Передаточный вал изготовлен как одно целое со звездочкой и закреплен в опорах с помощью двух шариковых подшипни ков. На звездочку накинута роликовая цепь, концы которой присоединены к устройству для натяжения цепи, находящемуся на управляемой колонне. На втулку нижнего подшипника по ставлены регулирующие шайбы. Шлицевой (свободный) конец вала сцеплен с нижним шарниром.
Микропереключатели тяговых электродвигателей смонтированы на валу рулевого механизма трехопорного электропогрузчика и служат для отключения или реверсирования тяговых электродвигателей на поворотах.
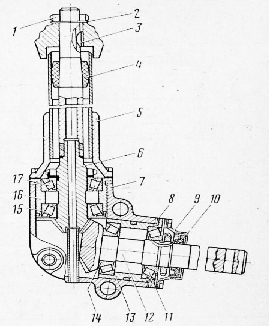
Конструкция устройства, изображенного на рис. 14, подобна конструкции, показанной на рис. 13.
Рулевой вал с заклиненным на нем рулем закреплен с помощью подшипников скольжения в редукторе, присоединенном к шасси болтами.
Через шарнирное соединение, вал и шарнир со шлицами вращение рулевого колеса передается валу, который отлит вместе со звездочкой и закреплен в опорах с помощью двух подшипников скольжения.
Звездочка поворачивает управляемую колонну с помощью цепи, прикрепленной к колонке планкой. В зависимости от угла поворота управляемой колонны через микропереключатели обеспечивается последовательное соединение тяговых электродвигателей или выключение одного из них.
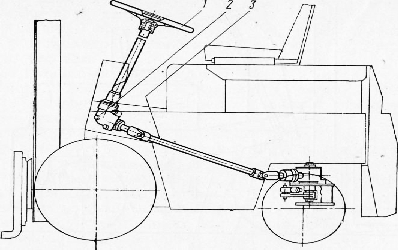
Устройство управления четырехопорного электропогрузчика отличается от рассмотренного выше лишь тем, что продольная тяга поворачивает трехплечий рычаг, к которому прикремены поперечные тяги.
Поворот рулевого колеса через редуктор передается карданному валу, который в свою очередь действует на червячный редуктор управляемого моста. Преимуществом этой конструкции является экономия места, необходимого для пространственного движения продольной тяги.
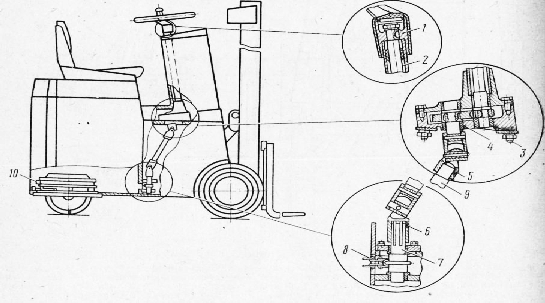
Устройство управления электропогрузчиков с продольным выдвижением грузоподъемного устройства. Устройство управления состоит из руля, рулевого механизма и цени.
Рулевой механизм крепится с помощью стойки к раме ведущего и управляемого моста, а посредством картера редуктора — к шасси. Рулевой механизм состоит из вала, промежуточного вала и вала со звездочкой. Валы соединены между собой шарниром и шарниром со шлицами, который скольжением шлицев принимает боковые отклонения ведущего и управляемого моста при движении электропогрузчика с продольным выдвижением грузоподъемного устройства.
Оба шарнира защищены от загрязнения резиновыми предохранителями. Вал крепится в картере редуктора с помощью шарикоподшипников, а вал прикреплен к стойке с помощью двух шарикоподшипников. Стрелка поворачивается редуктором, состоявшим из зубчатых шестерней.
Втулковая цепь входит в зацепление со звездочкой, а концы цепи посредством планки соединяются с тяговым электродвигателем ведущей колонны.
При повороте руля цепь поворачивает в ту же сторону ведущую колонну, и одновременно с этим редуктором поворачивается и стрелка, указывающая направление колонны (ведущего колеса).
Устройство управления электропогрузчиков с боковым выдвижением подъемного устройства отличается от устройства управления четырехопорного электропогрузчика наличием переднего управляемого моста. Тяга у электропогрузчиков с боковым выдвижением подъемного устройства укорочена, а кинематические устройства усложнены, так как необходимо, чтобы шлицевой рычаг двигался в плоскости, непараллельной продольной оси электропогрузчика.
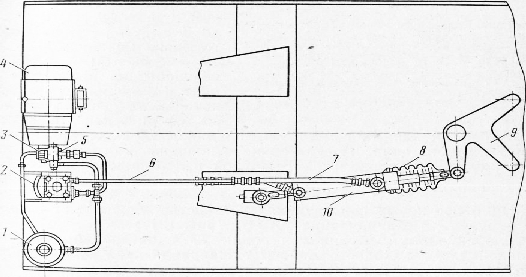
При необходимости приложения больших усилий обычно встраивают гидросервоусилители. При повороте шлицевого рычага перемещается продольная тяга, прикрепленная к управляемому кронштейну, который вращается вокруг вертикальной оси. Тяга служит для поворота средних управляемых колес, тяга — для поворота передних управляемых колес, а тяга — для поворота задних управляемых и ведущих колес. Для облегчения усилия водителя в корпусе рулевого механизма, встроен распределитель, подающий масло под давлением к цилиндру двустороннего действия, один конец которого прикреплен к управляемому кронштейну 9.4 В гидравлическую систему устройства входят насосный электродвигатель, шестеренный насос, гидравлический распределитель, встроенный в рулевой механизм, цилиндр. двустороннего действия и трубопроводы.
Устройство управления с рулевым механизмом с гидросервоусилителями, показанное на рис. 21, применяется чаще всего на универсальных электропогрузчиках. Здесь отсутствует механическая связь между рулевым механизмом и трех-плечим рычагом. Нагнетаемое шестеренным насосом масло через гидравлический распределитель (типа «Орбитрол», производство фирмы «Данфос») направляется к цилиндру двустороннего действия, с помощью которого поворачивается трехплечий рычаг. В схему включен клапан для ограничения нагрузки. Резиновая манжета 8 предохраняет поршневой штырь от загрязнения (необходимо иметь в виду, что цилиндр расположен под аккумуляторной батареей).
Основным элементом устройства управления является рулевой механизм.
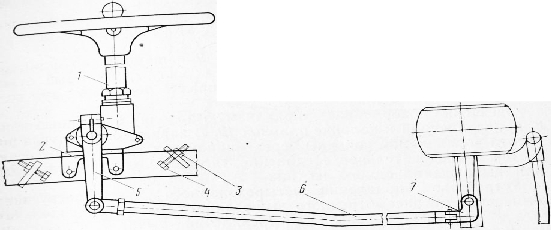
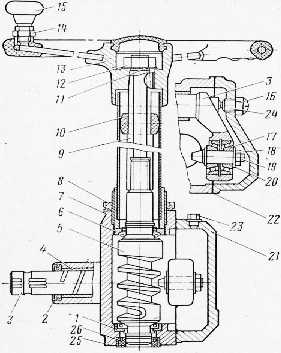
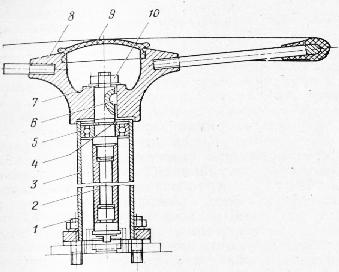
Одна из самых старых конструкций рулевого механизма машин показана на рис. 22. При поворачивании руля вращательное движение передается валу и передаточному винту посредством шпонки.
Движение пальца в пазах винта приводит к повороту выходного вала. Для удобства вращения руля предусмотрена рукоятка. Опорами передающего винта в картере рулевого механизма служат подшипники. Для упрощения монтажа выходного вала предусмотрена крышка. Положение вала фиксируется опорой, законтренной гайкой. Подшипником для верхнего конца вала служит пластмассовая втулка.
Позднее была создана конструкция рулевого механизма с полым валом (приваренным к передаточному винту) и звуковым сигналом.
В другой конструкции рулевого механизма палец заменен гайкой, навинчивающейся на передаточный винт и несущий штифт, на котором закреплена втулка со сферической поверхностью. Втулка занимает место подшипников в консольной части выходного вала. Передаточное отношение этого типа рулевого механизма равно 1:40.
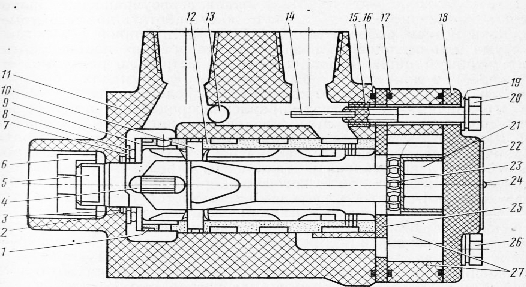
На более новых конструкциях устройство управления встроено в рулевой механизм типа ГАЗ-51.
Глобоидальный червяк и ролик смонтированы в консольной части выходного вала. Направляющая, приваренная к крышке, служит пазом для укладки проводов, ведущих к звуковому сигналу. Выходной вал имеет цилиндрические шли-цевые пазы, что упрощает изготовление шлицевого рычага. Зацепление регулируется винтом, законтренным гайкой.
Все рассмотренные типы рулевого механизма предназначены для механических устройств-управления.
Передаточный вал, оканчивающийся коническим зубчатым колесом, поворачивает выходной вал.
У некоторых электропогрузчиков момент сопротивления в управляемых колесах настолько возрастает, что усилие на колесе становится очень большим. В таких случаях устройство управления снабжено рулевым механизмом с гидросёрвоусилителем. Этот механизм состоит из двух частей: рулевого привода и гидравлического распределителя.
Рулевой привод, показанный на рис. 26, состоит из руля и вала, имеющего наконечник для присоединения к гидравлическому распределителю. Шпильками и гайками рулевой привод прикреплен к шасси, чтобы моменты изгиба не оказывали влияния на работу распределителя.
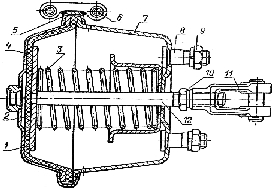
На рис. 27 показан гидравлический распределитель «Орбит-Рол», являющийся второй составной частью рулевого механизма с гидросервоусилителем. Гидравлический распределитель «Орбит-рол» производится фирмой «Данфос».
В нейтральном положении, т. е. когда к рулю не прикладывается усилие, рабочая жидкость, поступившая под давлением через правое отверстие, заполняет рабочий объем, проходит через соответствующие пазы и возвращается обратно в резервуар. В этом положении отверстия вала и трубы с пазами не соединены между собой и жидкость не может поступить в камеры, образованные распределительным кольцом и распределителем.
Когда поворачивают руль влево или вправо, пластинчатая пружина сжимается, пазы вала и трубы становятся друг против друга и, таким образом, создаются три пути рабочей жидкости: первый — от входного правого отверстия до одной из камер распределителя; второй — от второй камеры через соответствующее выходное отверстие до рабочего объема за поршнем цилиндра двустороннего действия; третий — от рабочего объема за поршнем цилиндра; через корпус, соответствующие пазы вала и трубу с пазами и через левое отверстие ведет до резервуара.
В следующий момент благодаря действию пружины восстанавливается начальное расположение вала и трубы и прекращается действие сервоусилителя. Для продолжения поворота необходим новый импульс — небольшой поворот руля, после чегоследует описанный цикл.
Аналогично проходит цикл при повороте руля в обратную сторону, пока полностью используется ход цилиндра двустороннего действия. Для нейтрализации возникающих в этом случае сверхдавлений предусмотрен клапан, с помощью которого лишняя рабочая жидкость возвращается обратно в резервуар.
Когда по какой-либо причине снижается давление поступающей рабочей жидкости, то вследствие более высокого давления жидкости в выходном пазу шарик перемещается, и рабочая жидкость совершает круговорот в самом сервоуправлении.
В этом случае, хотя и с большим усилием со стороны водителя, сервоуправление продолжает работать до того момента, пока потеря рабочей жидкости станет причиной образования вакуума или поглощения воздуха. Этого времени достаточно для того, чтобы машина прошла около ста метров до ремонтной мастерской или для того, чтобы убрать ее с дороги для обеспечения движения остальных транспортных средств.
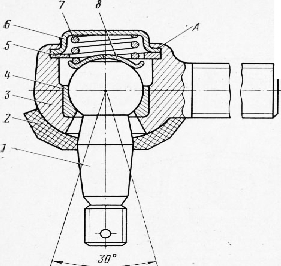
В различных устройствах управления продольные и поперечные тяги соединены с остальными элементами шаровыми соединениями. Шаровое соединение показано в разрезе на рис. 28. Болт заканчивается сферой. Соединения различаются диаметром этой сферы. Сфера закреплена в стакане и тарелке прижимающей пружиной и крышкой, которая запрессована в гнездо на поверхности А. Болт прикреплен к соответствующей детали по конической поверхности, а гнездо, соединенное с тягой, имеет наконечник с резьбой. Снизу сфера защищена прокладкой. Для смазывания соединения предусмотрена колпачковая масленка. Такое соединение позволяет оси болта отклоняться от среднего положения на определенный угол во всех направлениях, что необходимо из-за пространственного вида устройства управления.
Рекламные предложения:
Главная → Справочник → Статьи → Форум
Механизация земляных работ
Механизация строительства
Механизация дорожных работ
Автоматизация строительства
→ Бетонные работы
→ Мини-тракторы
 Разделы
Разделы
Строительные машины и оборудование
→ Для специальных земляных работ
→ Дорожно-строительные машины
→ Строительное оборудование
→ Асфальтоукладчики и катки
→ Большегрузные машины
→ Строительные машины, часть 2,
→ Дорожные машины, часть 2
→ Ремонтные машины
→ Ковшовые машины
→ Автогрейдеры
→ Экскаваторы
→ Бульдозеры
→ Скреперы
→ Грейдеры
Эксплуатация строительных машин
→ Эксплуатация средств механизации
→ Эксплуатация погрузочных машин
→ Эксплуатация паровых машин
→ Эксплуатация экскаваторов
→ Эксплуатация подъемников
→ Эксплуатация кранов перегружателей
→ Эксплуатация кузовов машин
→ Крановщикам и стропальщикам
Ремонт строительных машин
Ремонт дорожных машин
Ремонт лесозаготовительных машин
Ремонт автомобилей КАмаЗ
Техническое обслуживание автомобилей
Очистка автомобилей при ремонте
Материалы и шины
Остались вопросы по теме:
"Устройство управления электрокаров"
— воспользуйтесь поиском.
→ Машины городского хозяйства
→ Естественная история машин
→ Транспортная психология
→ Пожарные автомобили
→ Автомобили-рефрижераторы
→ Монтаж и эксплуатация лифтов
→ Тракторы