Строй-Техника.ру
Строительные машины и оборудование, справочник
Грузоподъемное устройство является тем механизмом, благодаря которому электропогрузчик становится подъемно-транспортной машиной. С его помощью совершается прием, подъем, спуск и освобождение груза.
Одно и то же грузоподъемное устройство с определенной гру3о. подъемностью может быть смонтировано на машинах различных типов. Благодаря этому создаются условия максимальной унификации устройств. Различные конструкции грузоподъемных устройств могут присоединяться к одному и тому же электропогрузчику, благодаря чему расширяется сфера применения электропогрузчиков.
Заменив только грузоподъемное устройство, можно получить электропогрузчики с высотой подъема 2200, 2800, 3300, 4500 или 5600 мм. Согласно документам СЭВ высоту подъема в 3300 мм принято называть номинальной, т. е. основной (базовый) электропогрузчик поднимает груз на максимальную высоту до 3300 мм; поднятый груз является номинальной грузоподъемностью машины. Когда высота подъема ниже номинальной, грузоподъемность равна номинальной грузоподъемности. Если высота подъема выше.
Рекламные предложения на основе ваших интересов:
Дополнительные материалы по теме:
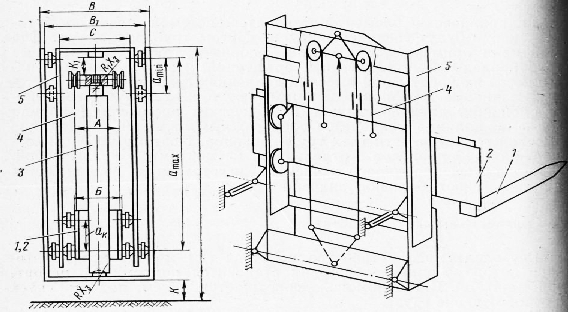
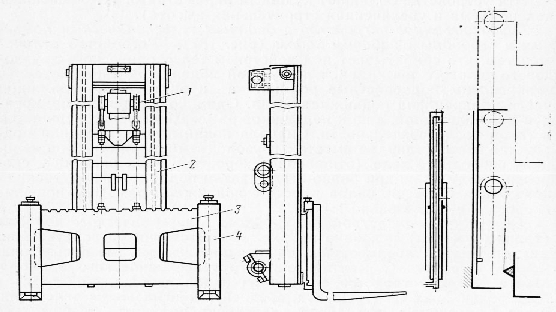
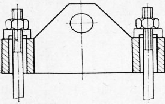
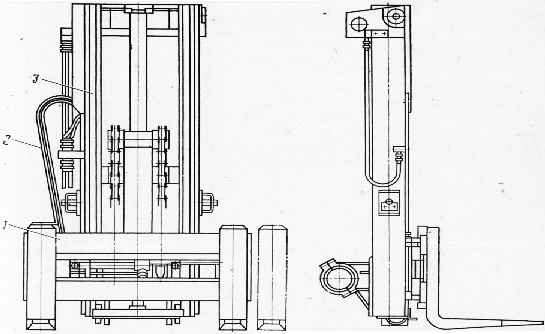
1 — цепной полиспаст; 2 — мачта; 3 — грузоподъемная каретка; 4 — вилка
Грузоподъемные устройства электропогрузчиков. На рис. 183 даны комплектные узлы грузоподъемных устройств. Рабочий орган имеет вид вилки (или платформы). Грузоподъемная каретка несет рабочий орган и совершает вертикальное движение в зависимости от хода подъема устройства. Мачта создает рельсовый путь для грузоподъемной каретки и обеспечивает рельсовый путь на протяжении всего хода подъема. Мачта состоит из двух или трех рам, телескопически смонтированных одна относительно другой. Цепной полиспаст 4 передает движение от приводного гидравлического силового подъемного цилиндра грузоподъемной каретке и мачте.
Существуют грузоподъемные устройства нескольких видов.
Роль мачты выполняет только одна рама. Такие уст-отТ?пп нмеют относительно небольшой ход подъема и применяются преимущественно для электропогрузчиков, занятых в технологическом процессе данного производства.
Силовой цилиндр приводит в действие полиспаст, состоящий из двух цепей и двух цепных роликов, соединенных с балкой. Один конец каждой цепи прикреплен к мачте, а второй — к грузоподъемной каретке. При подъеме силовым цилиндром цепные ролики вращаются, поднимая каретку на высоту удвоенного хода. Грузоподъемная каретка направляется ходовыми роликами в профилях, образованных мачтой.
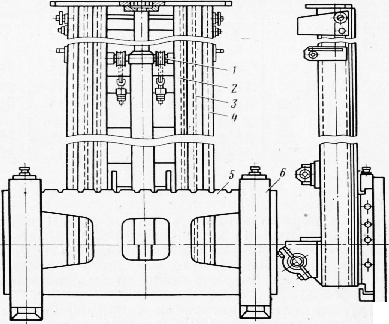
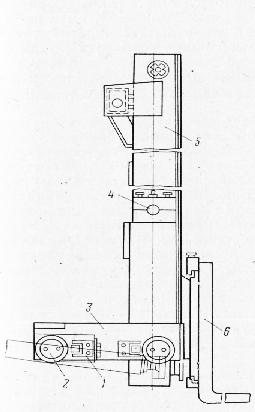
Грузоподъемное устройство с мачтой двойного телескопического подъема (дуплекс-мачта) показано на рис. 3. Это устройство применяется чаще всех других. Грузоподъемная каретка двигается в телескопической мачте, состоящей из одной подвижной и одной неподвижной рамы, благодаря чему обеспечивается нормальный ход подъема (обычно от 2800 до 3300 мм). Это устройство делают двух типов: либо с транспортным свободным ходом (от 150 до 350 мм), либо с рабочим свободным ходом (от 1200 до 1600 мм).
Первая разновидность устройства нашла широкое применение.
В некоторых конструкциях грузоподъемных устройств с транспортным свободным ходом из-за принятой низкой строительной высоты и большого свободного хода телескопически удлиненная мачта не обеспечивает рельсовый путь для грузоподъемной каретки в конце хода подъема. Поэтому, чтобы ролики не выходили за пределы мачты, к концу хода подъема каретка захватывает подвижную раму и поднимает ее вместе с собой. Захват осуществляется с помощью двух консолей, расположенных в задней части рамы каретки и поднимающих подвижную раму.
Применяются также грузоподъемные устройства, у которых подвижная рама присоединена неподвижно к подвижной части-силового цилиндра. Свободный ход получается уменьшением высоты подвижной рамы относительно высоты неподвижной рамы.
Эти устройства обладают худшими параметрами (уменьшенный ход подъема-и увеличенная строительная высота).
Грузоподъемное устройство с двойным телескопическим подъемом и свободным рабочим ходом. Устройство отличается тем, что срабатывает под действием телескопического двухходового силового цилиндра, к наружной подвижной части которого прикреплены полиспастные ролики, а к внутренней подвижной части прикреплена подвижная рама. Один конец цепей прикреплен к неподвижной, а не к подвижной раме. Движение совершается в такой последовательности. Сначала поднимается наружная подвижная часть цилиндра вместе с грузоподъемной .кареткой на величину свободного хода (отношение скорости и хода каретки к скорости и ходу цилиндра равно 2:1), а затем поднимается внутренняя подвижная часть цилиндра вместе с подвижной рамой (отношение скоростей и ходов равно 1:1).
Грузоподъемное устройство тройного телескопического подъема (триплекс-мачта) показано на рис. 188. Этот тип устройства применяется для штабелирования на большие высоты, где нельзя применить устройство с мачтой двойного телескопического подъема. Мачта такого устройства состоит из одной неподвижной рамы и двух подвижных (внутренней и средней), совершающих телескопическое движение. Устройство позволяет получить сравнительно большой ход подъема (от 4500 до 5700 мм). Существуют две разновидности устройства: с транспортным свободным ходом или с рабочим свободным ходом.
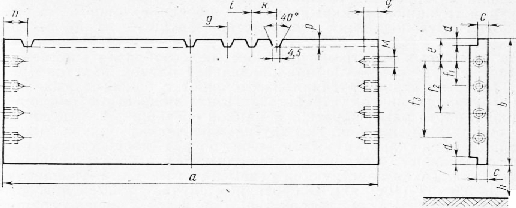
Нормальным рабочим органом электропогрузчиков является вилка. Ее образуют два клыка, смонтированных на плите грузоподъемной каретки.
Клыки состоят из рабочей части и двух кронштейнов (нижний и верхний) для закрепления к плите каретки. Верхний кронштейн имеет фиксирующее устройство, которое устанавливает клык вилки на определенном месте по длине плиты. На каждом клыке (место А) должна быть обозначена его грузоподъемность при номинальном расстоянии от его боковой поверхности до центра тяжести груза.
Рабочая часть оформлена таким образом, чтобы обеспечить простой прием груза. Для обеспечения высокой прочности в месте изгиба материал обрабатывают до получения с наружной стороны . прямого угла с минимальным закруглением. Рабочую часть изготавливают из стали с пределом текучести не меньше 35,3-104 кН/м2 (35 кг/мм2).
Кронштейны (верхний и нижний) присоединяют к рабочей части с. помощью сварки. Несущим элементом является верхний кронштейн, поэтому необходимо особое внимание уделять при его сварке. Очень хорошие результаты получаются при сварке в защитной среде из С02. По той же причине не разрешается применять перевернутые клыки, т. е. подвешенные на нижнем кронштейне. Рекомендуется каждый клык снабжать скобой для подъема, что упрощает монтаж, снятие и перемещение клыка по длине плиты вертикальной каретки.
Размеры клыков нормализованы, за исключением клыков для электрокаров, применяемых на железной дороге, где допускается уменьшение длины клыка до 820 мм. Допускается и увеличение высоты клыков, предназначенных для устройств с большим просветом над грунтом (электрокары с боковым выдвижением грузоподъемного устройства).
При эксплуатации электропогрузчиков применяются вилки с отклоняющимися клыками. Рабочая часть таких клыков может отклоняться в горизонтальной плоскости под действием внешнего усилия (упор в заграждение). После прекращения действия усилия рабочая часть под действием пружинного устройства снова занимает вертикальное положение. Такие клыки применяют для работы в узких коридорах, где после установки поддона электропогрузчик должен сделать крутой поворот, прежде чем вынуть вилку из-под поддона.
Применяются также сгибаемые клыкй, горизонтальная часть которых может занимать вертикальное положение, благодаря чему
уменьшается длина электропогрузчика при вхождении без груза в лифт, грузовик и др.
При работе с вилкой необходимо соблюдать следующее условие: длина горизонтальной части клыка вилки должна быть больше 2/3 длины поддона или любого груза. Если невозможно выполнить это условие, обязательно нужно применять удлинители. Грузоподъемная каретка состоит из рамы, ходовых и поперечных роликов. Основным элементом рамы является плита. К плите прикреплены не только клыки вилок, но и все сменные рабочие органы, применяемые для манипуляции с различными видами грузов, не устанавливаемых на поддоны. Плита каретки имеет два зуба — верхний и нижний, которые служат для захвата кронштейнов рабочих органов. Верхний зуб имеет прорези, предназначенные для фиксирования положения клыков вилки по длине плиты. С обеих сторон плита имеет по четыре отверстия для закрепления предохранительной решетки и некоторых сменных рабочих органов.
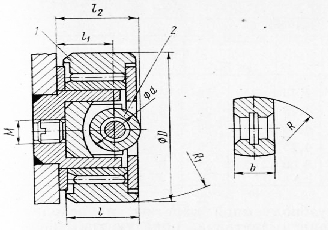
Грузоподъемная каретка движется посредством ходовых роликов в профилях мачты. Поперечные ролики принимают на себя случайные усилия, и их габариты гораздо меньше ходовых роликов.
Ходовые ролики закреплены в опорах с помощью подшипников качения на цапфах, приваренных к раме грузоподъемной каретки.
В общий узел объединены ходовой и поперечный ролики. Зазор между кареткой и мачтой в поперечном направлении регулируется винтовым устройством. Расстояние между поперечными роликами увеличено, что является преимуществом этого узла. В некоторых конструкциях поперечные ролики монтируются на осях, которые несут консоли вилок, закрепляемые винтами к раме каретки. Зазоры регулируются установкой различного числа прокладок между консолью вилки и рамой.
Основным требованием к узлу роликов является достижение минимального размера по ширине и диаметру ролика. Это требование является причиной применения игольчатых подшипников, работающих при больших нагрузках. Для лучшего самоустанавливания к направляющей поверхности ролики должны быть бочкообразной формы — это сказывается на долговечности подшипников.
В некоторых конструкциях грузоподъемных устройств рабочий орган и грузоподъемная каретка объединены. Рабочий орган представляет собой два клыка вилки, приваренные консоль-но к плите каретки. Клыки представляют собой тонкостенную конструкцию, прикрывающую передние опоры машины, когда грузоподъемное устройство опущено в нижнее положение.
На некоторых электропогрузчиках целесообразно применять грузоподъемную каретку с наклоняющейся плитой каретки. Такие электропогрузчики изготовляют с боковым выдвижением грузоподъемного устройства. Плита подвешена шарнирно к верхней части рамы каретки, а наклон совершается с помощью двух силовых цилиндров. На других электропогрузчиках плита грузоподъемной каретки выдвигается вперед посредством шарнирного рычажного механизма, приводимого в действие силовыми цилиндрами. Такая конструкция рекомендуется для грузоподъемности до 9,8 кН (1000 кг). В противном случае применение рычажного механизма и устройства является нецелесообразным из-за их большого веса. Конструкция находит ограниченное применение на электропогрузчиках по указанной причине, а также и потому, что необходима высокая точность ..изготовления шарнирного рычажного механизма.
Особо важное значение для конструкции мачты имеет направление движения одной рамы относительно другой при их телескопическом движении. Направление определяется конфигурацией профилей, образующих рамы. Существует большое число сочетаний профилей, каждый со своими преимуществами и недостатками. Предпочтительным является сочетание швеллера и двутавра. Швеллер — профиль для неподвижной рамы, а двутавр — профиль для подвижной рамы.
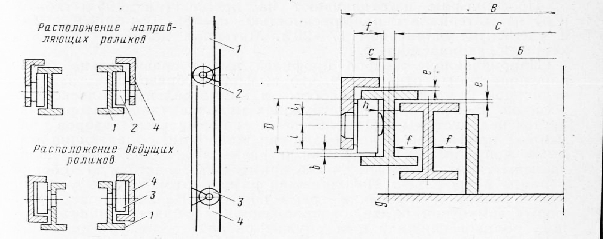
Направление роликов грузоподъемной каретки происходит во внутренних желобах профилей двутавра, образующих подвижную раму. При таком сочетании профилей рамы мачты направляются одна относительно другой следующим образом: в верхней части швеллера, образующего неподвижную раму, расположена пара роликов, направляющих подвижную раму качением во внутренних желобах двутавровых профилей. В нижней части профилей подвижной рамы расположена пара роликов.
Направляющие и ведущие ролики мачты унифицированы с роликами грузоподъемной каретки. Рассмотренное сочетание профилей обладает тем преимуществом, что разрешает направление рам осуществить только двумя парами роликов без дополнительных ведущих устройств. Кроме того, при телескопическом подъеме мачты расстояние между обоими роликами уменьшается плавно — самое большое плечо пары опорных реакций в роликах получается на малых высотах подъема, где обычно манипулируют с грузами большого веса.
Направляющие желоба профилей имеют сравнительно большие допустимые отклонения, что вызывает образование зазоров величиной 2 мм между желобом и диаметральной плоскостью роликов. В некоторых конструкциях наличие таких зазоров является недопустимым. Для обеспечения нормальных зазоров применяют профили с калиброванными желобами, обладающие малыми допустимыми отклонениями размера желоба. Из-за дороговизны таких профилей часто применяют селективную сборку роликов и профилей. Неподвижная рама в этом случае усилена в поперечном направлении тремя поясами. Верхний пояс имеет форму замкнутой балки, расположенной в области направляющих роликов; нижний пояс служит опорой силового цилиндра (мачта с двойным телескопическим подъемом); средний пояс расположен в области силовых цилиндров наклона устройства.
Для прикрепления цепей полиспаста к неподвижной раме используют нижний пояс. Таким образом, нагрузка пояса от силового цилиндра (в случае грузоподъемных устройств с двойным телескопическим подъемом и транспортным свободным ходом) уменьшается на 50%.
Подвижная рама укрепляется верхним и нижним поясами. В устройствах с мачтами с двойным телескопическим подъемом и транспортным свободным ходом верхний пояс снабжен направляющей для подвижной части силового цилиндра и балки цепных роликов до прохождения свободного хода. Нижний пояс всегда расположен в передней части подвижной рамы. Пояса к-профилям присоединяются сваркой.
Для мачт с тройным, телескопическим подъемом применяется сочетание швеллерных и двутавровых профилей при неподвижной раме и швеллерных профилей при подвижной раме. Рамы направляются одна относительно другой подобно мачтам с двойным телескопическим подъемом. Пояса внутренней подвижной рамы присоединяются к профилям винтами. В противном случае нельзя осуществить монтаж мачты.
В верхнем конце профилей рамы, в которой движется грузоподъемная каретка, есть механические ограничители, которые следует установить в крайнее верхнее положение. Ограничители предохраняют верхнюю пару ходовых роликов каретки от выхода за направляющие желоба. Выход ходовых роликов каретки может стать причиной аварии или несчастного случая. Механические ограничители не являются необходимыми в конструкциях, у которых в конце хода подъема грузоподъемная каретка захватывает подвижную раму и поднимает ее с собой.
Для полиспастов грузоподъемных устройств применяют пластинчатые цепи из-за их большой прочности и небольшого удельного удлинения, а также из-за возможности уменьшить диаметр полиспастных роликов.
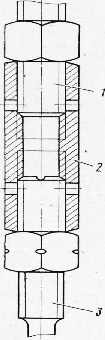
Цепи прикрепляются к грузоподъемной каретке и соответствующей раме мачты Цепными болтами для регулировки длины цепей: коротким и регулировочным. Между опорами и гайками цепных болтов монтируются пары сферических шайб, предохраняющих цепные болты от изгиба. Цепи присоединяют к мачтам посредством балансировочного устройства и тонких длинных стержней. Балансировочное устройство создает условия для обеспечения одинаковой нагрузки обеих цепей полиспаста. Применение длинных тонких стержней необходимо в связи с их эластичным удлинением под нагрузкой. Таким образом, ударные нагрузки при спуске груза или при движении по неровной дороге воспринимаются стержнями, а не цепями.
Кроме того, только с помощью стержней цепи могут быть подвешены к нижнему поясу неподвижной рамы (для устройств с двойным телескопическим подъемом и транспортным свободным ходом).
Когда используют стержни, длина цепей регулируется шестигранными обтяжками с правой и левой резьбой, соединяющими шест с регулировочным болтом. Обтяжки устанавливают на удобной для манипулирования высоте. Обтяжки имеют контрольные отверстия, указывающие минимальную необходимую глубину ввинчивания резьбы болта и шеста. Обтяжки стопорятся с помощью гаек.
Цепные ролики полиспаста закреплены в опорах с помощью подшипников качения. Элементы роликов полиспаста, грузоподъемной каретки и мачты являются унифицированными.
Грузоподъемное устройство универсальных электропогрузчиков монтируется шарнирнр к шасси или к переднему мосту машины. В определенном положении его удерживают цилиндры наклона.
Устройство прикреплено к шасси посредством цапф или проушин, приваренных к нижней части неподвижной мачты. К переднему мосту устройство прикреплено с помощью скоб с подшипниковыми втулками. Цилиндры наклона присоединены к устройству посредством проушин, прикрепленных к профилям, или к среднему поясу неподвижной рамы.
Некоторые грузоподъемные устройства присоединены неподвижно к шасси машины сваркой, и они не наклоняются.
У электропогрузчиков с продольным выдвижением грузоподъемное устройство несет на себе каретка, двигающаяся между передними опорами машины. Устройство закрепляется на каретке шар-нирно с помощью цапф, расположенных над силовым цилиндром наклона. Сама каретка приводится в движение гидравлическим силовым цилиндром.
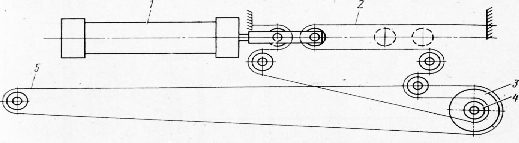
Грузоподъемное устройство с боковым выдвижением прикреплено неподвижно (сваркой). к выдвигающейся каретке. Приводом каретки служит механизм с гидродвигателем или гидравлический цепной механизм, который состоит из гидравлического силового цилиндра двустороннего действия, одной передающей цепи и пары цепей, соединенных с выдвигающейся кареткой грузоподъемного устройства. При движении поршневого штока гидравлического цилиндра передающей цепью поворачивается зубчатое колесо, установленное на общем валу. Зубчатым колесом приводятся в движение цепи. Техническое обслуживание такой системы упрощено.

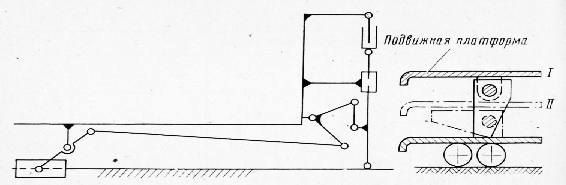
На рис. 203 показано грузоподъемное устройство с поперечным перемещением. У такого типа устройств осуществляется перемещение всего грузоподъемного устройства в направлении, перпендикулярном продольной оси электропогрузчика. Благодаря этому можно принять или поставить груз даже в случае расположения электропогрузчика так, что центр тяжести груза не попадает на продольную ось электропогрузчика. Таким образом сокращается число маневров, совершаемых машиной, что положительно сказывается на увеличении производительности электропогрузчика и уменьшении физической усталости водителя. Поперечным движением можно воспользоваться и для установки груза непосредственно у стены, параллельной продольной оси машины, благодаря чему экономится складовая площадь.
Рабочий орган вместе с плитой грузоподъемной каретки или с самим грузоподъемным устройством совершает боковое движение с ходом около 100 мм в обе стороны. Плита совершает боковое движение относительно рамы грузоподъемной каретки, приводимой в движение силовым цилиндром, смонтированным на самой раме. Плита каретки скользит по цилиндрическим направляющим или шарикам, обеспечивающим минимальное сопротивление трению. Недостатком такой конструкции является то, что грузоподъемная каретка становится сложней и тяжелей из-за гидравлического силового цилиндра, а питающие его трубопроводы следуют движению каретки по всей высоте подъема. Иное решение получается, если боковое движение совершается всем грузоподъемным устройством. Механизм бокового движения расположен в шасси машины за грузоподъемным устройством. Таким образом, грузоподъемное устройство становится несколько легче и отпадают трубопроводы, двигающиеся вместе с кареткой.
За последние несколько лет на электропогрузчиках появились грузоподъемные устройства со сравнительно узкими по ширине мачтами. Причиной этого является стремление создать меньшее по объему и весу грузоподъемное устройство, обеспечивающее лучшую видимость водителю машины, в результате чего облегчается и компоновка электропогрузчиков и достигаются лучшие параметры и эксплуатационные результаты.
Грузоподъемные устройства электротележек с низким подъемом служат для приема груза и поднятия его на высоту. Существуют грузоподъемные устройства с вилкой и платформенные.
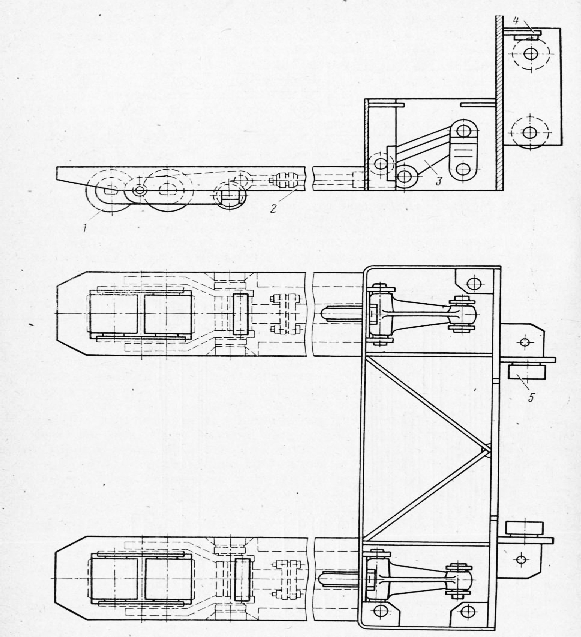
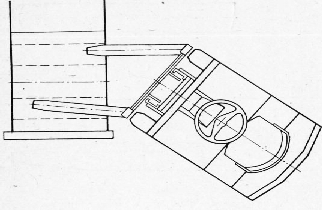
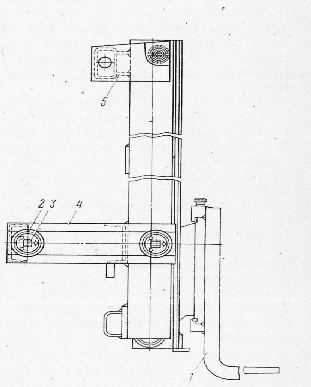
Грузоподъемное устройство с вилкой для электротележек с низким подъемом (рис. 204) предназначено для манипулирования плоскими поддонами, включая четырехпроходные. Конструкция устройства объединяет как рабочий орган-вилку, так и передние колеса электротележки (ходовые ролики). Чтобы передние колеса могли пройти через проходы поддонов, они должны иметь малый диаметр — не более 85 мм. Небольшой диаметр передних колес и большая нагрузка являются причиной того, что электротележки, оснащенные такими устройствами, работают только на специально подготовленном полу.
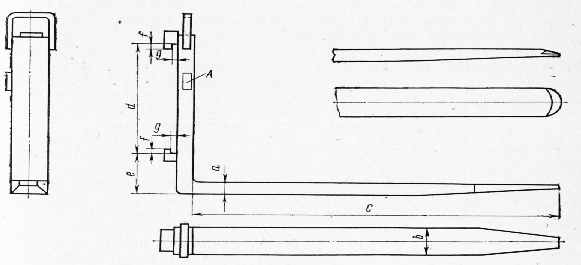
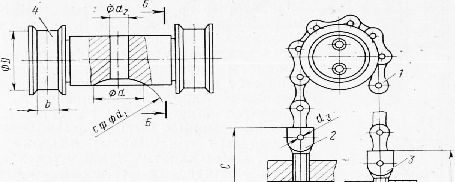
На рис. 24 даны основные размеры грузоподъемного устройства с вилкой, позволяющие манипулировать поддонами различных размеров. Ход подъема должен обеспечить подъем нижней поверхности поддона над полом на высоту не менее 50 мм. Для легкого приема и освобождения поддона рекомендуется, чтобы в самом нижнем положении вилка была немного наклонена к концам клыков.
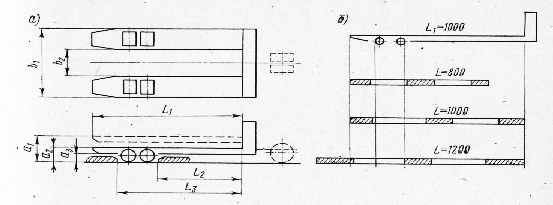
Несущая часть устройства представляет собой сварную конструкцию из жести. Для уменьшения высоты вилки клыки вырезают -над ходовыми роликами, что позволяет их диаметру выровняться с несущей поверхностью вилки.
Ходовые ролики могут быть одинарными,— для грузоподъемности до 19,6 кН (2000 кг) или двойными, соединенными с балансиром,—для грузоподъемности до 29,4 кН (3000 кг). Кроме их большей грузоподъемности, двойные ролики легче преодолевают препятствия, возникающие при входе в вырезы поддона и при движении электротележки. Для облегчения движения на повороте рекомендуется, чтобы ходовые ролики, когда они длиннее, состояли из двух частей,- Изготавливают ролики из стали и снабжают их бандажом из резины или из синтетического материала; смонтированы они на игольчатых подшипника!.
На концах клыков вилки около ходовых роликов устанавливают один, два или целый ряд вспомогательных роликов, облегчающих вход вилки в вырез поддона.
Устройство приводится в действие (подъем и опускание груза) рычажным шарнирным механизмом, приводом для которого служит гидравлический силовой цилиндр (один или два). Рычажным механизмом обеспечивается параллельный подъем рабочей поверхности вилки. Несущие шарниры закреплены в опорах посредством игольчатых подшипников или подшипниковых втулок.
Платформенные устройства применяются для работы с товарными платформами. Устройство представляет собой рабочий орган в виде платформы, расположенной над передними колесами машины и покрывающей их в самом нижнем положении. Платформа оснащена роликами, которые направляются аналогично роликам грузоподъемной каретки в желобах профилей, представляющих собой часть шасси электротележки.
Сварная конструкция платформы изготовлена из листового материала, рабочая ее часть — рифленой жести. Ролики унифицированы с роликами грузоподъемных устройств электропогрузчиков. В некоторых конструкциях направление платформы в боковом направлении осуществляется скольжением текстолитовых пластин.
Универсальная и удобная для эксплуатации конструкция сочетает в себе грузоподъемное устройство с вилкой и устройство с подвижной платформой. Платформа монтируется над клыками вилки, поэтому электротележка с низким подъемом превращается в платформенную электротележку. Ее можно регулировать по высоте, что позволяет маневрировать с рабочими платформами разной высоты.
Рекламные предложения:
Главная → Справочник → Статьи → Форум
Механизация земляных работ
Механизация строительства
Механизация дорожных работ
Автоматизация строительства
→ Бетонные работы
→ Мини-тракторы
 Разделы
Разделы
Строительные машины и оборудование
→ Для специальных земляных работ
→ Дорожно-строительные машины
→ Строительное оборудование
→ Асфальтоукладчики и катки
→ Большегрузные машины
→ Строительные машины, часть 2,
→ Дорожные машины, часть 2
→ Ремонтные машины
→ Ковшовые машины
→ Автогрейдеры
→ Экскаваторы
→ Бульдозеры
→ Скреперы
→ Грейдеры
Эксплуатация строительных машин
→ Эксплуатация средств механизации
→ Эксплуатация погрузочных машин
→ Эксплуатация паровых машин
→ Эксплуатация экскаваторов
→ Эксплуатация подъемников
→ Эксплуатация кранов перегружателей
→ Эксплуатация кузовов машин
→ Крановщикам и стропальщикам
Ремонт строительных машин
Ремонт дорожных машин
Ремонт лесозаготовительных машин
Ремонт автомобилей КАмаЗ
Техническое обслуживание автомобилей
Очистка автомобилей при ремонте
Материалы и шины
Остались вопросы по теме:
"Грузоподъемные устройства электрокаров"
— воспользуйтесь поиском.
→ Машины городского хозяйства
→ Естественная история машин
→ Транспортная психология
→ Пожарные автомобили
→ Автомобили-рефрижераторы
→ Монтаж и эксплуатация лифтов
→ Тракторы