Строй-Техника.ру
Строительные машины и оборудование, справочник
Для обеспечения безопасной работы механизмов подъема и изменения вылета грузоподъемные машины оборудуются автоматически действующими приборами безопасности, выключающими механизмы при подходе груза и стрелы к их предельным положениям, а также выключающими механизмы при подъеме груза, вес которого превышает грузоподъемность крана. Механизмы подъема с электрическим приводом снабжают концевыми выключателями, автоматически выключающими ток при подходе груза к крайнему верхнему (а иногда и нижнему) положению. Концевой выключатель механизма подъема устанавливают так, что после остановки грузозахватного устройства при подъеме без груза зазор между грузозахватным устройством и упором у электроталей составляет не менее 50 мм, а у всех других грузоподъемных машин — не менее 200 мм.
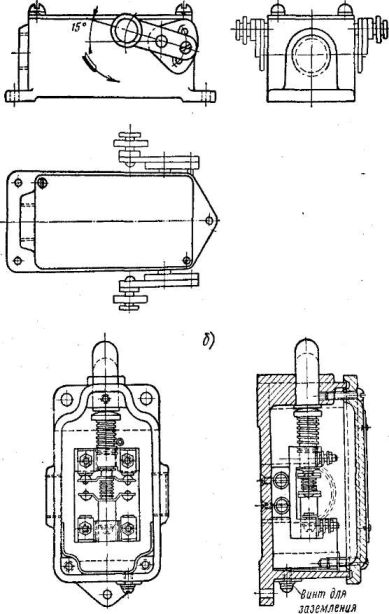
Рис. 1. Конечные выключатели:
а — рычажные; б — кнопочные
Рекламные предложения на основе ваших интересов:
Дополнительные материалы по теме:
При одностороннем ограничении хода груза обычно применяют рычажные или кнопочные конечные выключатели. При достижении грузозахватным устройством крайнего положения происходит разрыв цепи управления; это приводит к отключению электродвигателя механизма и к одновременному замыканию тормоза, что обеспечивает своевременную остановку груза. Электрическая схема предусматривает возможность пуска механизма в обратном направлении.
При необходимости ограничения хода механизма в обоих направлениях движения применяют шпиндельные выключатели, шпиндель-винт которого получает вращение от одного из валов механизма через зубчатую или цепную передачу. По нарезке шпинделя перемещается гайка, выключающая своим поводком контакты в конечных положениях, соответствующих предельному верхнему и нижнему положениям грузозахватного органа. При этом даже при находящейся в рабочем положении ручке контроллера происходит разрыв цепи управления и контактор выключает силовую цепь электродвигателя механизма, что приводит к остановке механизма. Цепь контакта остается замкнутой и при переводе рукоятки контроллера в положение (показанное пунктиром), соответствующее движению механизма в обратном направлении, контактор обеспечивает включение двигателя, обратный ход механизма и отход гайки от контакта вправо. При этом контакт снова замыкается. Передаточное число передачи должно быть подобрано так, чтобы за время перемещения грузозахватного устройства от крайнего нижнего положения в крайнее верхнее гайка перешла по шпинделю от одного крайнего положения до другого.
Ограничитель высоты подъема, устанавливаемый на кранах мостового типа, показан на рис. 3, а. Рычаг конечного выключателя типа КУ, соединенного с цепью управления, удерживается в положении замкнутых контактов весом груза, укрепленного на шарнирно закрепленном рычаге. Усилие от рычага передается на рычаг конечного выключателя через тросик. При достижении грузозахватным устройством крайнего верхнего положения оно приподнимает рычаг, ослабляя усилие в тросике. Под воздействием пружины, имеющейся в конечном выключателе, его контакты размыкаются, выключая электродвигатель механизма подъема.
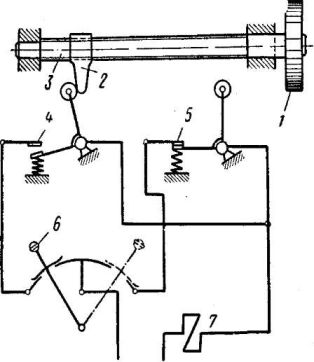
Рис. 2. Схема шпиндельного конечного выключателя
В конструкции применен рычажный конечный выключатель, контакты которого удерживаются в замкнутом положении весом специального грузика, подвешенного на тросе. Во избежание раскачивания грузика на нем имеется специальная скоба, охватывающая неподвижные концы грузового каната. Установка концевого выключателя, ограничивающего подъем стрелы, показана на рис. 4, а. Стреловые краны снабжаются также указателями вылета стрелы и грузоподъемности, соответствующей этому вылету. Этот указатель, укрепленный сбоку на стреле крана, состоит из массивной, шарнирно подвешенной стрелки, конец которой указывает величину вылета и веса допускаемого груза, нанесенные на шкале. Аналогичная шкала укреплена на другой стороне стрелы. По этой шкале передвигается указатель, жестко соединенный со стрелкой.
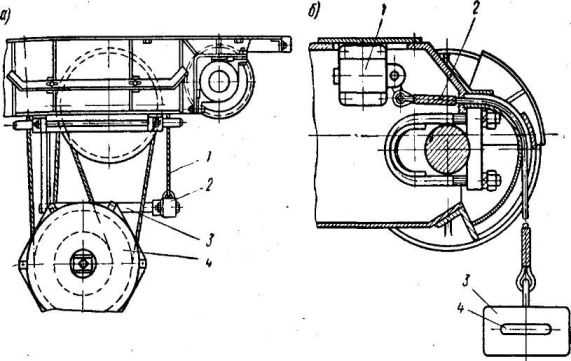
Рис. 3. Установка ограничителей высоты подъема груза
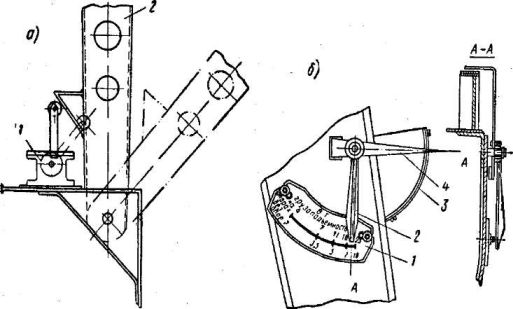
Рис. 4. Установка ограничителей:
а — хода стрелы; б — указателя вылета стрелы
Для предотвращения перегрузки крана, которая может вызвать обрыв грузовых гибких органов (канатов или цепей), поломку крюков и других деталей механизма, образование трещин и остаточных деформаций металлоконструкции и опрокидывание стреловых передвижных кранов, механизмы подъема грузоподъемных машин снабжаются ограничителями грузоподъемности, автоматически выключающими двигатель механизма подъема, если груз превышает номинальную грузоподъемность более чем на 10%.
При подъеме номинального груза, в процессе его разгона, на кран, а следовательно, и на ограничитель грузоподъемности действует нагрузка, равная сумме статического и динамического усилия Ртах. Затем постепенно колебание нагрузки уменьшается и устанавливается статическое усилие Рном, равное номинальной нагрузке. Ограничение максимальной статической нагрузки при подъеме груза, при которой срабатывает ограничитель грузоподъемности, производится с учетом динамической нагрузки.
Настройка ограничителя должна быть такой, чтобы при подъеме номинального груза с минимальным ускорением не происходило срабатывание ограничителя. Однако при попытке подъема номинального груза с повышенным ускорением ограничитель должен сработать, прекращая подъем. При подъеме предельного груза РПреД, равного 110% номинального, с минимальным ускорением (кривая 2) ограничитель срабатывает. После затухания колебаний динамической нагрузки, когда на ограничитель действует только статическая составляющая веса предельного груза Рпред, ограничитель также не дает возможности включения механизма на подъем. Поэтому усилие, вызывающее срабатывание ограничителя грузоподъемности, находится в пределах между суммой статического и минимального динамического усилия при подъеме номинального груза Ртах и статическим усилием (Рпред) при подъеме предельного груза. Чем больше разница между этими усилиями, тем больше поле допуска на усилие срабатывания ограничителя.
Для устойчивости работы ограничителя грузоподъемности необходимо, чтобы минимальная динамическая нагрузка, действующая на ограничитель, не превышала 10% номинальной статической нагрузки; или же в конструкции ограничителя должно быть предусмотрено устройство (датчик времени), не позволяющее ограничителю сработать в период действия динамической нагрузки, превышающей 10% номинальной статической нагрузки.
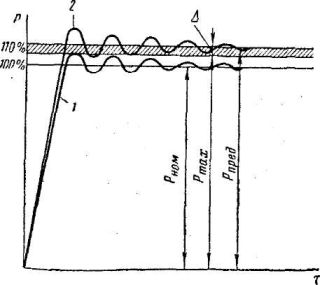
Рис. 5. Изменение усилия, действующего на ограничитель грузоподъемности в процессе подъема груза
Так как величина е имеет наименьшие значения для звеньев механизма, соприкасающихся с грузом, то и поле допуска становится наибольшим при расположении ограничителя грузоподъемности на этих звеньях.
Ограничители грузоподъемности обычно состоят из датчика усилия и исполнительного (отключающего) органа. По устройству датчиков воспринимающих и уравновешивающих действующие на кран усилия различают пружинные, грузовые, торсионные и электрические ограничители. Опыт эксплуатации показывает, что наибольшую точность срабатывания дают торсионные и электрические датчики. Датчики могут быть связаны с различными элементами крана. На рис. 6 представлена конструкция пружинного ограничителя грузоподъемности, использующая блок грузового каната, установленный на коротком плече рычага. Второе плечо рычага соединено штоком с пружиной. При увеличении нагрузки на канат, проходящий через блок, пружина сжимается и при превышении допускаемой величины планка 3 нажимает на шток конечного выключателя, разрывая цепь управления механизмом подъема и останавливая его.
Для стреловых кранов, грузоподъемность которых зависит от вылета стрелы, применяют ограничители грузового момента, реагирующие не только на вес поднимаемого груза, но и на величину вылета, на котором производится подъем. Ограничитель грузового момента электрического типа состоит из трех элементов: датчика усилия, датчика угла наклона стрелы и релейного блока. Датчик усилий устанавливается между распорками и растяжками, соединяющими стрелу с подвижной обоймой стрелоподъемного полиспаста. Этот датчик представляет собой кольцевой динамометр с потенциометрическим преобразователем, выдающим электрический сигнал, пропорциональный измеряемому усилию.
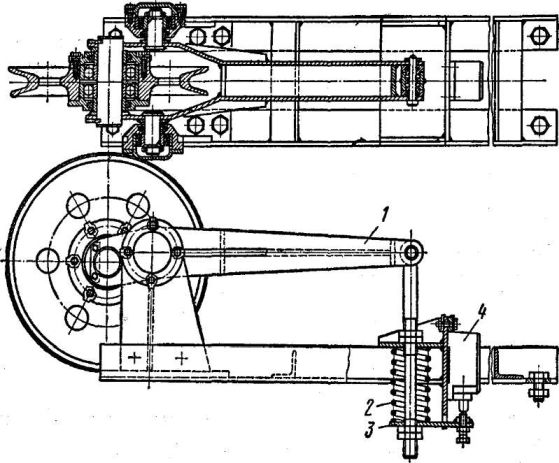
Рис. 6. Ограничитель грузоподъемности
Силоизмерительным элементом датчика является упругое кольцо, растягивающееся под действием усилий в растяжках, пропорциональных весу поднимаемого груза. Деформация кольца через спиральную пружину передается на передаточный механизм, преобразующий линейное перемещение тяг динамометрического кольца в угловое. Этот механизм вращает ось потенциометра и линейная деформация кольца преобразуется в электрический сигнал.
Датчик угла наклона устанавливается на кронштейне соосно с осью поворота стрелы и связан поводком с пальцем, укрепленным на стреле. При изменении наклона стрелы поворачивается вал датчика угла наклона, связанный с рычагом потенциометрического преобразователя. В данном ограничителе грузового момента используется принцип сравнения электрических сигналов, подаваемых датчиками усилия и угла наклона стрелы. Прибор срабатывает при разности электрических сигналов, равной нулю, [что соответствует наличию максимально допустимой нагрузки.
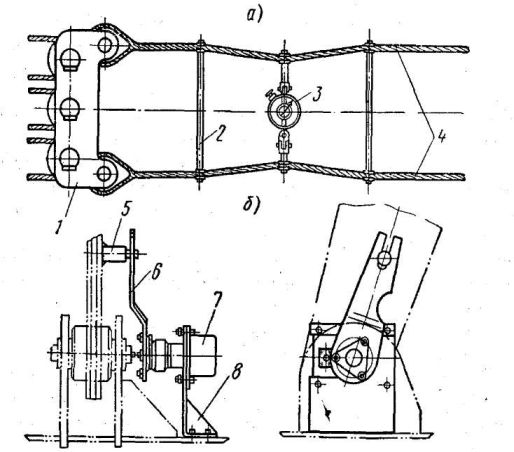
Рис. 7. Ограничитель грузового момента стрелового крана:
а — установка датчика усилия; б — установка датчика угла наклона стрелы
Торсионный ограничитель грузового момента состоит из торсионного стального вала, жестко закрепленного одним концом в стальной трубе. На втором конце торсионного вала, имеющего возможность вращения, в подшипнике закреплена серьга, соединенная с неподвижным концом каната стрелового полиспаста. Угол закручивания торсионного вала, а значит и угол поворота, укрепленного на нем рычага, при работе вала находится в пределах упругих деформаций и пропорционален усилию, возникающему в стреловом полиспасте при подъеме груза, это усилие зависит от веса поднимаемого груза при данном вылете стрелы. При усилии, превышающем допускаемую нагрузку, рычаг воздействует на микровыключатель и размыкает электрическую цепь управления краном.
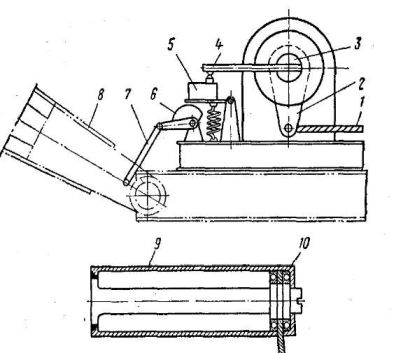
Рис. 8. Торсионный ограничитель грузового момента
Для обеспечения срабатывания ограничителя при любом вылете стрелы в случае перегрузки крана более чем на 10% в конструкцию ограничителя введено корректирующее устройство, выполненное в виде кулачка соответствующего профиля, шарнирно укрепленного под микровыключателем и связанного рычагом со стрелой крана. При изменении вылета стрелы кулачок поворачивается и приподнимает или опускает качающуюся площадку, на которой установлен микровыключатель, что приводит к изменению зазора между рычагом и штоком микровыключателя, а следовательно, и к изменению возможного угла закручивания торсионного вала и допустимой нагрузки на кран при данном вылете стрелы.
Сравнение электрических сигналов обоих датчиков производится при помощи поляризационного реле, включенного в диагональ моста, образованного потенциометрами датчиков. При балансе плеч моста сигнал подается релейным блоком в цепь управления механизма, что приводит к разрыву цепи питания исполнительного механизма, а также к одновременному включению аварийных звукового и светового сигналов. Настройка ограничителя грузового момента производится на требуемую характеристику крана при помощи дополнительных сопротивлений.
Для большинства кранов период вертикальных затухающих колебаний груза находится в пределах 0,4—1 сек. В течение одного полупериода в конструкции могут возникать динамические усилия, которые вместе со статическим усилием от веса груза могут создать опрокидывающий момент, превышающий по своей величине восстанавливающий момент. Однако опрокидывание передвижного крана происходит только в том случае, если опрокидывающий момент по величине и времени действия достаточен для перемещения центра тяжести крана в точку неустойчивого равновесия. Время этого перемещения значительно больше полупериода действия динамической нагрузки и, следовательно, кратковременные перегрузки не являются опасными для устойчивости и прочности крана и не должны вызывать срабатывание ограничителя грузового момента. Поэтому сигнал от релейного блока в сеть управления краном подается с некоторой выдержкой времени, что обеспечивает нормальную работу крана в периоды неустановившегося движения груза.
На кранах, имеющих неогражденные троллейные провода, установленные на самих кранах, должны быть предусмотрены приспособления (выключатели), автоматически отключающие троллеи при выходе обслуживающего персонала на галереи, лестницы, площадки, прилегающие к троллеям.
Рекламные предложения:
Главная → Справочник → Статьи → Форум
Механизация земляных работ
Механизация строительства
Механизация дорожных работ
Автоматизация строительства
→ Бетонные работы
→ Мини-тракторы
 Разделы
Разделы
Строительные машины и оборудование
→ Для специальных земляных работ
→ Дорожно-строительные машины
→ Строительное оборудование
→ Асфальтоукладчики и катки
→ Большегрузные машины
→ Строительные машины, часть 2,
→ Дорожные машины, часть 2
→ Ремонтные машины
→ Ковшовые машины
→ Автогрейдеры
→ Экскаваторы
→ Бульдозеры
→ Скреперы
→ Грейдеры
Эксплуатация строительных машин
→ Эксплуатация средств механизации
→ Эксплуатация погрузочных машин
→ Эксплуатация паровых машин
→ Эксплуатация экскаваторов
→ Эксплуатация подъемников
→ Эксплуатация кранов перегружателей
→ Эксплуатация кузовов машин
→ Крановщикам и стропальщикам
Ремонт строительных машин
Ремонт дорожных машин
Ремонт лесозаготовительных машин
Ремонт автомобилей КАмаЗ
Техническое обслуживание автомобилей
Очистка автомобилей при ремонте
Материалы и шины
Остались вопросы по теме:
"Приборы безопасности механизмов подъема"
— воспользуйтесь поиском.
→ Машины городского хозяйства
→ Естественная история машин
→ Транспортная психология
→ Пожарные автомобили
→ Автомобили-рефрижераторы
→ Монтаж и эксплуатация лифтов
→ Тракторы