Строй-Техника.ру
Строительные машины и оборудование, справочник
Противоугонные устройства предназначаются для удержания крана, работающего на открытом воздухе, от самопроизвольного перемещения по рельсовому пути под действием ветра, по силе превосходящего предельный рабочий.
Противоугонными устройствами должны быть снабжены башенные, козловые, портальные и другие краны, перемещающиеся по рельсовому пути.
Мостовые краны, работающие на открытом воздухе, противоугонными устройствами можно не снабжать, если тормоз рассчитан на удержание крана под действием ветра. При проектировании таких кранов должно быть проверено, чтобы запас удерживающей силы при воздействии ветра на кран составлял не менее 1,2. Сила ветра принимается по ГОСТ 1451—55 для нерабочего состояния крана с учетом ветрового района установки крана.
Рекламные предложения на основе ваших интересов:
Дополнительные материалы по теме:
С помощью противоугонных устройств, основными элементами которых являются рельсовые захваты, кран вручную или автоматически закрепляется за рельсы. Простейшим и наиболее распространенным устройством является ручной клещевой захват, охватывающий головку рельса. Рычаг захвата с помощью винта зажимает головку рельса и удерживает кран от угона. С ходовой тележкой рычаги соединяются с помощью пальца. При нерабочем положении захвата рычаги снимаются с рельса и устанавливаются губками вверх. В таком положении благодаря овальным отверстиям они и удерживаются стенкой рамы во время работы крана.
Краностроительными заводами башенные краны серии КБ выпускаются с противоугонными захватами скользящего типа, которые неудобны в эксплуатации и требуют применения для стыковки рельсов специальных накладок, отсутствующих у большинства строительных организаций. Кроме того, в местах установки накладок имеются случаи поломки рельсов. Этот захват может быть заменен полуавтоматическим захватом, рекомендованным Госстроем СССР.
Полуавтоматический противоугонный рельсовый захват предназначен для удержания крана от перемещения под действием ветровой нагрузки в нерабочем состоянии и предотвращения схода с рельс ходовых тележек при работе крана на подкрановых путях с рельсами Р-38 (ГОСТ 3542—47**), Р-43 (ГОСТ 7173—54) и Р-50 (ГОСТ 7174— 65*) с соответствующими этим рельсам накладками (ГОСТ 4133—54).
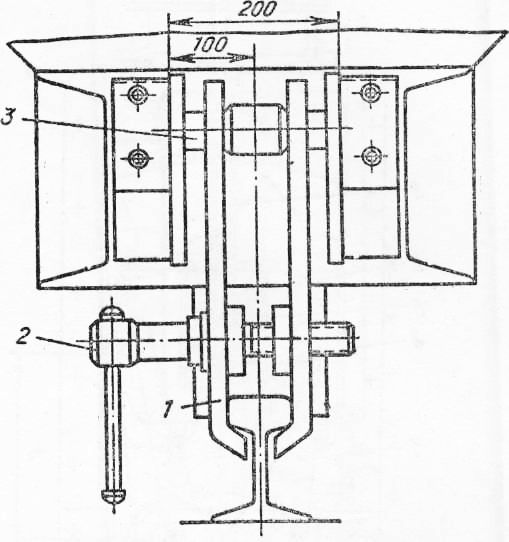
Рис. 1. Ручной клещевой захват
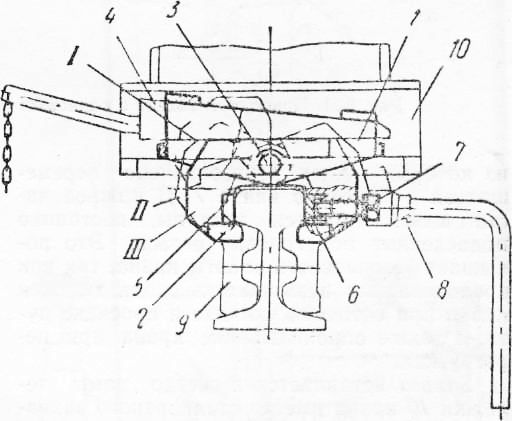
Рис. 2. Полуавтоматический рельсовый захват
1 — положение щеки при установке захвата в гнездо ходовой тележки; II — положение щек при обходе рельсовых накладок; III—нормальное положение щек
Захват может устанавливаться на всех кранах серии КБ, имеющих унифицированные ходовые тележки.
Захват состоит из сварного каркаса, двух щек, шарнирно подвешенных на общей оси, и клинового фиксатора, Щеки снабжены губками, одна из которых может горизонтально перемещаться с помощью винта. В нижней части щек имеются выступы, постоянно подведенные под головку рельса. Это повышает безопасность работы крана, так как предотвращает возможность схода тележек крана при неточной укладке и просадке пути, а также опрокидывание крана при перегрузках.
Захват вставляется в гнездо рамы тележки 10 крана вместо стандартного захвата тискового типа без каких-либо переделок самой рамы.
При движении крана по подкрановым путям щеки свободно проходят через рельсовые накладки благодаря заходным фаскам, имеющимся на горизонтальных выступах щек. В случае отрыва ходовой тележки от рельса захватные щеки автоматически подхватывают головку рельса. По окончании работы крана между корпусом и щеками вставляется клиновой фиксатор и торцовым ключом посредством винта производится зажим головки рельса между губками.
Преимущества предлагаемого полуавто магического рельсового захвата по сравнению с применяемым следующие:
1) обеспечивает возможность работы крана на подкрановых путях со стандартными двухголовными рельсовыми накладками, применяемыми на железных дорогах широкой колеи;
2) обеспечивает безопасность работы крана за счет автоматического подхвата головки рельса и более надежен в эксплуатации;
3) более прост по конструкции, менее металлоемок и менее трудоемок в изготовлении и в эксплуатации.
На рис. 3 приведена конструкция захвата, приводимого в действие от электродвигателя и устанавливаемого на козловые краны Узловским машиностроительным заводом.
Замыкания рычагов производится опусканием клинового ползуна, осуществляемого электродвигателем через редуктор и передачу винт — гайка. Гайка воздействует на клиновой ползун через спиральную пружину. Вначале происходит опускание клинового ползуна вместе с клещами под действием собственной массы. После того как стяжка клещей ляжет на головку рельса, начинается деформация пружины и вместе с ней перемещение клинового ползуна относительно рычагов. Клиновой ползун, спускаясь и воздействуя наклонными пазами на ролики, установленные на верхних концах рычагов, разводит рычаги и губки входят в соприкосновение с баковыми поверхностями головки рельса. Гайка, продолжая перемещаться вниз, деформирует на определенную величину пружину и своим упором воздействует на концевой выключатель, установленный на клиновом ползуне и отключающий приводной электродвигатель, обеспечивающий необходимое усилие зажатия рельса. Кроме того, пружина обеспечивает свободный выбег гайки после отключения электродвигателя. Для ограничения хода ползуна вверх в корпусе захвата установлен концевой выключатель.
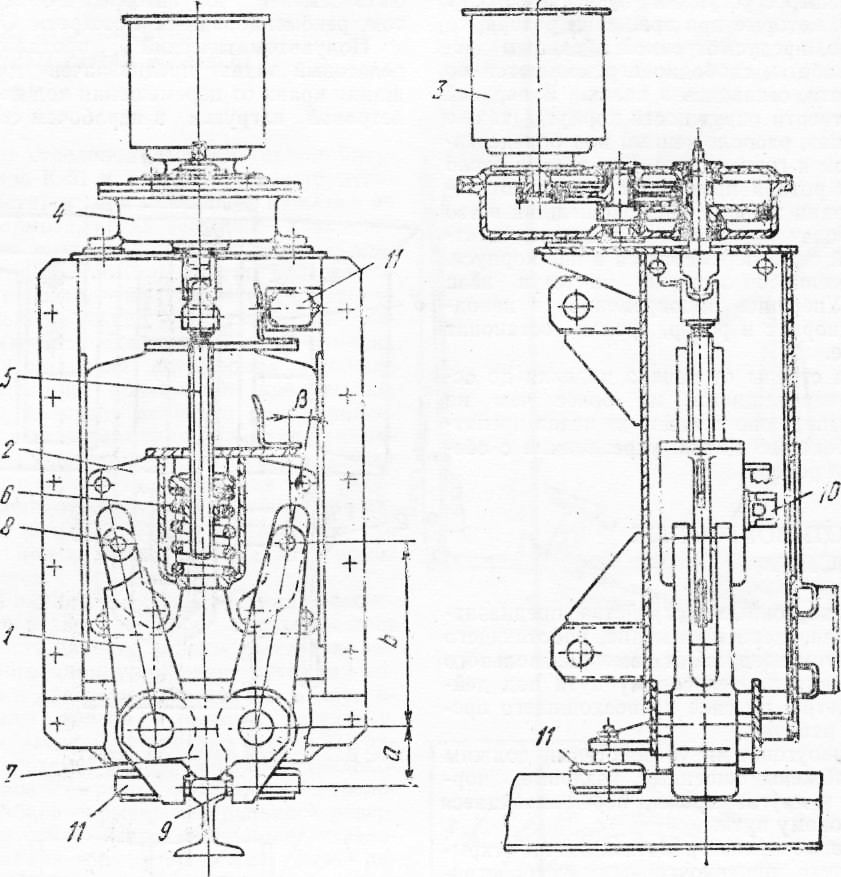
Рис. 3. Приводной захват с клиновым ползунок
Правильное положение опускающихся рычагов клещей по отношению к головке рельса обеспечивается направляющими роликами, которыми снабжен захват.
Клиновой ползун имеет пазы с двумя участками наклона: нижний, составляющий с вертикалью угол около 30°, служит для быстрого сведения и разведения клещей без нагрузки, верхний, принимаемый обычно 4— 8°,— для получения значительного усилия зажатия при небольшом усилии нажатия гайки.
В случае обрыва электропитания захват может быть приведен в рабочее положение с помощью ручки, надеваемой на выступающий из редуктора конец тихоходного вала. Захваты такого типа изготовляются на удерживающее усилие до 30 т.
Харьковским филиалом «Энергомонтаж-проект» разработаны два типа противоугонных захватов: один — с расчетной удерживающей силой 3 тс, второй — с удерживающей силой, регулируемой в диапазоне Е—11 тс для кранов различных типов и моделей грузоподъемностью Е—50 тс.
Автоматический противоугонный захват с удерживающей силой 3 тс работает на принципе использования подъемной силы центробежного привода для удержания (при работающем электродвигателе) системы зажимающих рычагов в разведенном состоянии.
Захват состоит из электродвигателя, центробежного привода, корпуса, зажимающих силовых пружин, распорного клина с тягой, траверсой, клещевых рычагов с зажимными губками.
При обесточивании крана или при получении сигнала от анемометра двигатель захватов, отключается, ветви центробежного привода опадают. Под действием силы сжатых пружин, передающейся через траверсу и клин, рычаги поворачиваются, зажимая губками головку подкранового рельса. Перед пуском крана захваты раскрываются с помощью электродвигателя, приводящего, во вращение грузы центробежного привода. При этом клин перемещается в верхнее положение, пружины сжимаются, а рычаги освобождают головку рельса. В этом положении срабатывает конечный выключатель, установленный на захвате и замыкающий цепь питания электродвигателей механизмов передвижения крана.
Захват предназначается для установки на кранах с незначительной парусностью при угонной силе ветра нерабочего состояния 12 тс. На ходовой части крана могут быть установлены 2—4 таких захвата.
Для кранов с угонной силой 10—40 тс разработана конструкция автоматического противоугонного захвата с максимальной удерживающей силой 11 тс, которая создается за счет использования угонной силы ветра, действующей на кран. Губки захвата накладываются с помощью вертикально перемещающегося копира, приводимого в действие от холостого ходового колеса угоняемого крана через зубчатую передачу, фрикционную муфту предельного момента и реверсивный привод с цепью, один конец которой шарнирно прикреплен к копиру, а второй наматывается на диск. Губки захвата автоматически разжимаются электрогидравлическим толкателем. Величина удерживающей силы захвата определяется массой груза, поднимаемого толкателем, и может регулироваться от 5 до 11 тс. Захват может устанавливаться как на балочные ходовые тележки крана, так и на балансирные механизмы передвижения со стороны холостого колеса.
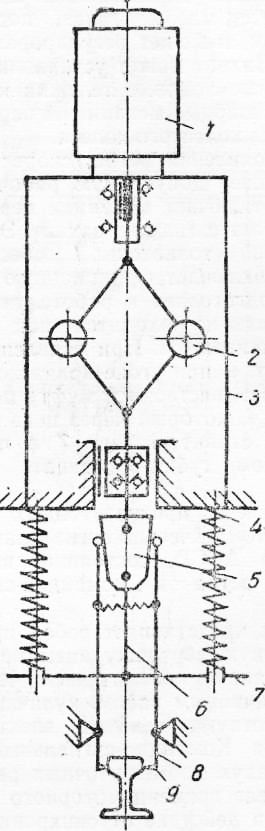
Рис. 4. Автоматический противоугонный захват с удерживающей силой 3 тс
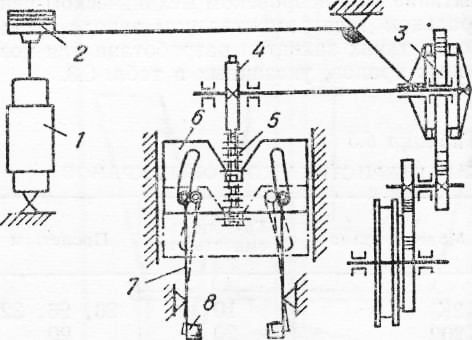
Рис. 5. Автоматический противоугонный захват с удерживающей силой до II тс
При появлении ветра, скорость которого превышает допустимую рабочую, сигнализатор отключает механизм передвижения крана и дает сигнал на захват. Электрогидравлический толкатель обесточивается и груз 2 включает фрикционную муфту. Захват подготовлен к работе, но при этом его элементы не находятся под нагрузкой и не изнашиваются. При появлении опасного ветра, т. е. при угоне крана ходовым колесом, через шестерни и муфту поворачивается диск, который через цепь привода копира ставит рычаги в положение, при котором губки захвата зажимают рельс.
В комплект противоугонных устройств входит автоматический сигнализатор скорости ветра АССВ, состоящий из датчика скорости ветра и командно-сигнального блока.
Датчик представляет собой приемник — трехчашечную вертушку анемометрического типа, связанную кинематически через редуктор с кулачковым валом, кулачки которого взаимодействуют с двумя электрическими контактами. Командно-сигнальный блок состоит из двух промежуточных реле, специального реле времени моторного типа, приводимого в действие от синхронного электродвигателя и трех сигнальных ламп и кнопок. Аппаратура смонтирована на гети-наксовой передней панели корпуса блока.
Автоматические противоугонные захваты обоих типов и прибор АССВ прошли испытание на Днепровском механическом центральном экспериментальном заводе.
Кинематическая схема автоматического противоугонного захвата, разработанного инженерами Ясиноватовского машиностроительного завода, для козловых кранов приведена на рис. 6.34.
Захват вступает в работу от сигнала, поданного ветромером при достижении скорости ветра более 12,5 м/с или после отключения рубильника крана. Сигнал подается на электромагнит, который, обесто-чиваясь, приводит в движение систему рычагов и пружину. Пружина, разжимаясь, вводит в зацепление кулачковую муфту, сидящую на направляющей шпонке вала холостого катка механизма передвижения крана.
При перемещении крана под действием ветра вращение от вала катка будет передаваться через кулачковую муфту на водило с закрепленными на его осях собачками храпового устройства. Храповое устройство двустороннего действия срабатывает при перемещении крана вперед и назад. Получив вращение от водила, храповик в блоке со звездочкой через цепную передачу передает вращение (непосредственно или через пару зубчатых колес) на кулачковую полумуфту, соединенную с помощью шлицевого соединения с винтом, имеющим правую и левую трапецеидальную резьбу.
С винтом соединяются гайкн — правая и левая. Гайки своими цапфами входят в пазы клещевин. При вращении винта гайки начнут расходиться от середины винта к его концам, увлекая за собой клещевины. Верхние плечи клещевин будут расходиться, а нижние сходиться, зажимая головку рельса. Для обеспечения соосности губок клещевин с осью рельса клещевины выполнены самоцентрирующимися, что достигается возможностью смещения шарнирного валика в пазу кронштейна и смещения винта на шлицах вдоль оси шлицевого вала.
Для развода губок клещей и освобождения головки рельса необходимо опустить гайку, затем, вращая гайку против часовой стрелки, вывести кулачковую полу-муфту на защепление с зубчатым блоком. Вращением рукоятки шлицевого вала губки клещей разводятся до упора. В этом положении концевой выключатель, закрепленный на гайке клещевины, должен замкнуть электрическую цепь. После вращения гайки 22 в обратном направлении кулачковая полумуфта вводится в зацепление с зубчатым блоком, закрепляется гайкой и захват не препятствует передвижению крана.
При передвижении крана губки клещей захвата должны быть разведены в крайнее положение, в противном случае электроблокировка должна отключить питание крана.
При отключенном рубильнике автоматический противоугонный захват готов к действию. Следовательно, крановщик при уходе с крана или появлении сильного ветра должен отключить рубильник.
Для обеспечения нормальной работы автоматического противоугонного захвата необходимо выполнять разработанные авторами захвата мероприятия по уходу и смазке.
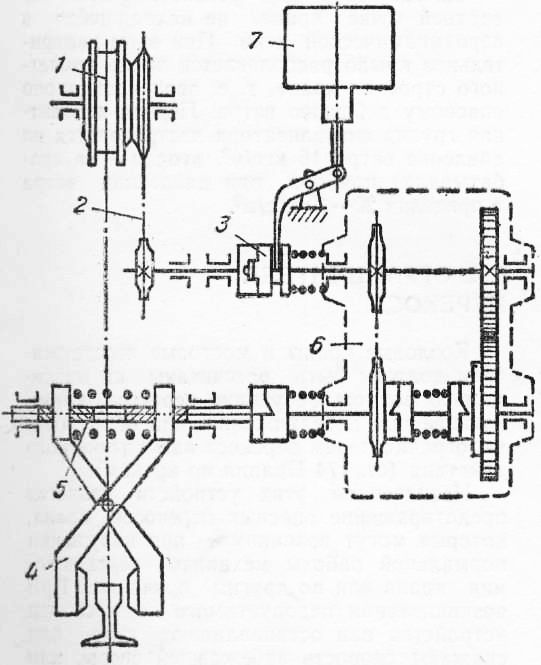
Рис. 7. Кинематическая схема автоматического противоугонного захвата
Рис. 8. Кинематическая схема автоматического клещевого противоугонного захвата
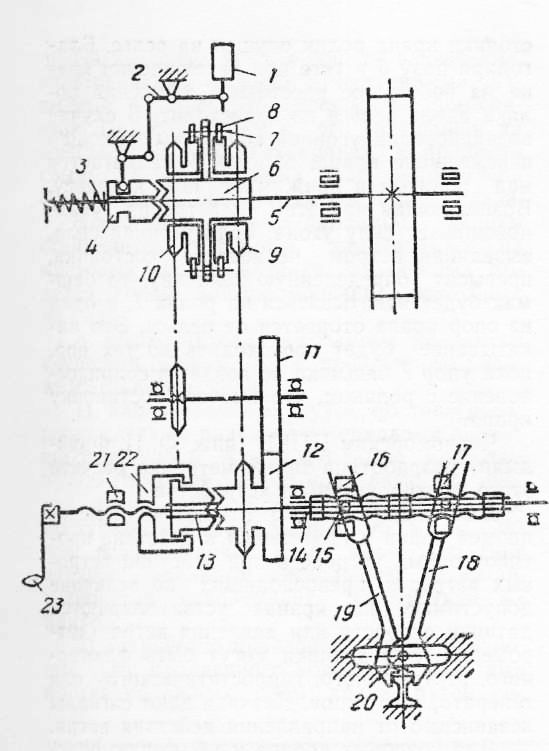
Рис. 9. Электрическая схема автоматического клещевого противоугонного захвата
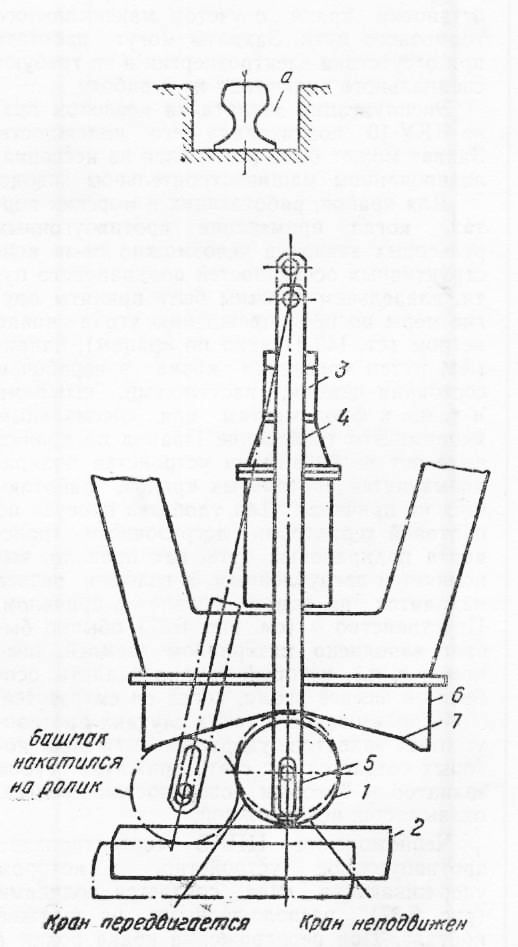
Рис. 10. Заглубленный подкрановый рельс а и противругонное устройство для портальных кранов
Клещевые захваты с приводом от ходового колеса крана разработаны Белгородским котлостроительным заводом на базе чертежей Ясиноватовского машиностроительного завода. Конструктивно захват выполнен иначе и схематически представлен на рис. 6.35.
Вращение ходового колеса передается цепной передачей через кулачковую муфту на специальный редуктор, который передает одностороннее вращение винту при движении крана в любом направлении. При вращении винта верхние концы рычага клещей разжимаются, а нижние захватывают головку рельса, затормаживая кран. Отключение механизма захвата производится при срабатывании электромагнита передвижением подвижной полумуфты вдоль ведущего вала редуктора.
Электрической схемой предусмотрено отключение захватов только при работе механизма передвижения крана, а также невозможность включения линейного контактора защитной панели при срабатывании клещевых захватов. Это достигается тем, что концевые выключатели BK3 и ВК32 устанавливаются на рычагах захватов, разрывают цепь управления краном. Электромагнит отключается после полной остановки крана с учетом максимального тормозного пути. Захваты могут работать при отсутствии электроэнергии и не требуют специального включения их в работу.
Эксплуатация захвата на козловом крапе ККУ-10 подтвердила его надежность. Захват может быть изготовлен на неспециализированном машиностроительном заводе.
Для кранов, работающих в морских портах, когда применение противоугонных рельсовых захватов невозможно из-за конструктивных особенностей подкранового пути, владельцем должны быть приняты другие меры по предупреждению угона крана ветром (ст. 149 Правил по кранам), например, путем крепления крана в нерабочем состоянии цепями, растяжками, штырями и т. п. к фундаментам или специальным якорям. Это требование Правил по кранам вытекает из специфики устройства подкрановых путей портальных кранов, работающих на причалах. Для удобства проезда по портовой территории погрузочного транспорта подкрановый путь, как правило, выполняется заглубленным, а головка рельса находится на одном уровне с причалом. Пространство а обычно бывает заполнено материалом (землей, песком и т. п.), который трудно удалить, особенно в зимнее время, когда он смерзается.
Использование в таких случаях противоугонных захватов, удерживающая сила которых создается за счет прижатия губок захватов к боковым поверхностям рельса, оказывается невозможной.
Черноморским ЦПКБ спроектировано противоугонное устройство, в котором удерживающая сила создается роликами, расположенными на затяжке портала. При передвижении крана ролик захвата приподнят над. рельсом гидроцилиндром с помощью тяги и сопротивления передвижению не оказывает. Во врем)я стоянки крана ролик опущен на рельс. Благодаря пазу в тяге при перемещении крана на небольшое расстояние движения ролика вдоль рельса не происходит. В случае возникновения угонной силы, вызывающей перемещение крана, башмак надвигается над роликом и прижимает его к рельсу. Возникающая при этом сила трения уравновешивает силу угона. Если угонная сила, вызванная ветром нерабочего состояния, превысит определенную величину, то башмак будет накатываться на ролик, а одна из опор крана оторвется от рельса. Это накатывание будет происходить до тех пор, пока упор башмака не войдет в соприкосновение с роликом, что вызовет остановку крана.
Черноморским ЦПКБ (инж. Ф. И. Фрайдман) разработана также методика расчета этого противоугонного устройства.
Для своевременного отключения механизмов крана и приведения в действие противоугонных устройств при действии ветровых нагрузок, превосходящих по величине допустимые, на кранах устанавливаются датчики скорости или давления ветра (ветромеры). Эти датчики могут быть флюгерного, вертушечного, гидростатического или генераторного типов. Датчики дают сигналы независимо от направления действия ветра.
Для козловых кранов наибольшую опасность представляют ветровке нагрузки, действующие вдоль подкрановых путей. Эта особенность требует установки на кранах датчиков, которые подают сигнал только при действии ветровых нагрузок определенного направления. Таким датчиком является сигнализатор давления ветра СДЗ, серийно изготовляемый отечественной промышленностью.
Сигнализатор СДВ устанавливается на верхней точке крана, не находящейся в аэродинамической тени. При этом измерительное крыло располагается вдоль пролетного строения крана, т. е. перпендикулярно опасному действию ветра. Первая контактная группа сигнализатора настраивается па давление ветра 15 кгс/м2, вторая — на срабатывание прибора при давлениях ветра в пределах 2С—40 кгс/м2.
Рекламные предложения:
Главная → Справочник → Статьи → Форум
Механизация земляных работ
Механизация строительства
Механизация дорожных работ
Автоматизация строительства
→ Бетонные работы
→ Мини-тракторы
 Разделы
Разделы
Строительные машины и оборудование
→ Для специальных земляных работ
→ Дорожно-строительные машины
→ Строительное оборудование
→ Асфальтоукладчики и катки
→ Большегрузные машины
→ Строительные машины, часть 2,
→ Дорожные машины, часть 2
→ Ремонтные машины
→ Ковшовые машины
→ Автогрейдеры
→ Экскаваторы
→ Бульдозеры
→ Скреперы
→ Грейдеры
Эксплуатация строительных машин
→ Эксплуатация средств механизации
→ Эксплуатация погрузочных машин
→ Эксплуатация паровых машин
→ Эксплуатация экскаваторов
→ Эксплуатация подъемников
→ Эксплуатация кранов перегружателей
→ Эксплуатация кузовов машин
→ Крановщикам и стропальщикам
Ремонт строительных машин
Ремонт дорожных машин
Ремонт лесозаготовительных машин
Ремонт автомобилей КАмаЗ
Техническое обслуживание автомобилей
Очистка автомобилей при ремонте
Материалы и шины
Остались вопросы по теме:
"Противоугонные устройства кранов"
— воспользуйтесь поиском.
→ Машины городского хозяйства
→ Естественная история машин
→ Транспортная психология
→ Пожарные автомобили
→ Автомобили-рефрижераторы
→ Монтаж и эксплуатация лифтов
→ Тракторы