Строй-Техника.ру
Строительные машины и оборудование, справочник
Для трех основных рабочих узлов погрузочных машин различают привод и систему управления: рабочего органа, механизма передвижения и передаточных конвейеров. Кроме этого погрузочные машины оборудуются вспомогательными механизмами, предназначенными для выполнения таких операций, как повороты платформы, подъем и опускание приемной плиты, подъем и повороты конвейера, отталкивание вагонеток, опрокидывание бункера и др.
Погрузочные машины с независимым питанием отличаются высокой маневренностью и отсутствием силовых коммуникаций. Поэтому, в частности, аккумуляторные погрузчики и машины с дизельным приводом широко используются на складах, в портах, на железнодорожных станциях и т. д.
Общими недостатками машин с приводом независимого питания являются высокая стоимость энергии, необходимость создания зарядного хозяйства для аккумуляторов, ограниченная емкость аккумуляторных батарей и резервуаров горючего и большие габаритные размеры машин, что ограничивает их применение в стесненных подземных условиях или в судовых трюмах.
Рекламные предложения на основе ваших интересов:
Дополнительные материалы по теме:
Групповой привод погрузочных машин с механическими передачами (например, в машинах типа С-153, Е-100) значительно усложняет конструктивное исполнение машин, их управление и ремонт. Поэтому в современных конструкциях используется главным образом индивидуальный привод каждого рабочего механизма, что отчетливо видно из рассмотрения кинематической схемы мощной погрузочной машины непрерывного действия типа ПНР-1.
Привод рабочего органа I осуществлен от электродвигателя МАД-П/МГ мощностью 65 кет. Строгая синхронизация в работе правой и левой лапы достигается общей кинематической связью редукторов. Приводы приемного конвейера II и перегружателя IV осуществлены от четырех однотипных электродвигателей А051-4 с номинальной мощностью каждого 4,5 кет. Каждая гусеница оборудована индивидуальным приводом III от электродвигателя АОС63-4/2 мощностью 14 кет.
Индивидуальный привод не лишен существенных недостатков, к которым следует отнести большую установленную мощность двигателей, усложнение электрической схемы машин, повышенные требования к электрическому оборудованию, воспринимающему высокие динамические нагрузки непосредственно от рабочих механизмов. Указанные недостатки устраняются в погрузочных машинах, оборудованных групповым приводом с гидравлическими трансмиссиями. На машине типа ТПГР-1 (Торецкий машиностроительный завод) установлена гидравлическая станция, оборудованная насосами высокого давления типа Н-403 и электродвигателя типа КОФ41-4. Рабочая жидкость под давлением подводится ко всем механизмам машины (гребково-роторному рабочему органу, механизму передвижения, конвейерам и др.), осуществляя привод последних с помощью гидромоторов или гидроцилиндров.
Все отечественные шахтные погрузочные машины имеют электрический или пневматический привод; в наземных машинах преимущественно используются двигатели внутреннего сгорания. Начатые опытно-конструкторские работы указывают на полную возможность создания унифицированных ковшовых машин прямой погрузки с взаимозаменяемым электрическим и пневматическим приводом. Пневматические двигатели типа ДРП-16, которые изготовляются на заводе «Пневматика», являются взаимозаменяемыми с электрическими двигателями типа КТСВ 110/775М, применяемыми в погрузочных машинах ЭПМ. Такими двигателями снабжаются унифицированные машины типа МПУ-1.
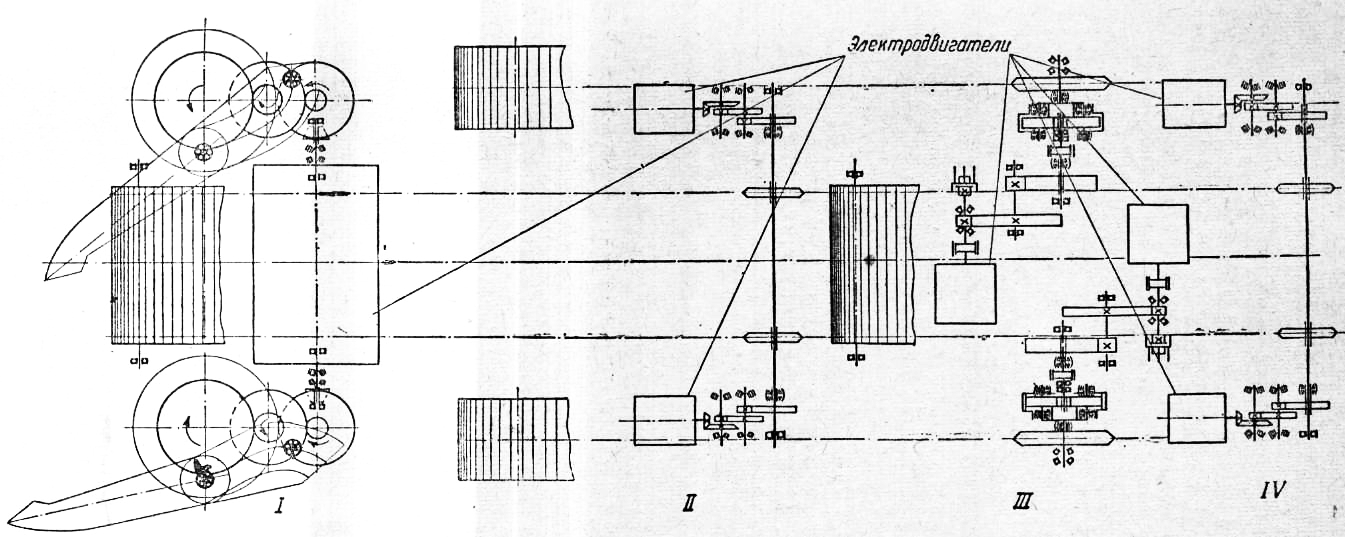
Рис. 1. Кинематическая схема погрузочной машины типа ПНР-1.
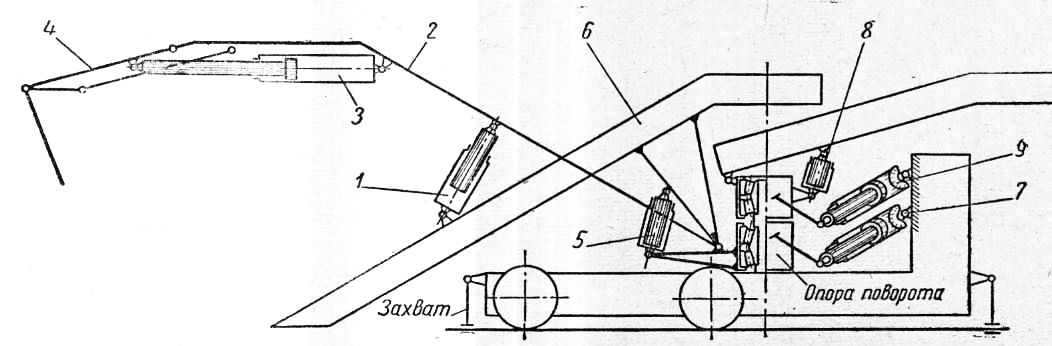
Рис. 2. Схема рабочих механизмов погрузочной машины типа ПМС.
В связи с этим для каждой модели машин в соответствии с условиями их возможного применения должен быть рассмотрен вопрос о целесообразном типе привода и принято то или иное сочетание взаимозаменяемых типов привода (электрический, пневматический или дизельный). Как показывает опыт эксплуатации, для многих моделей шахтных погрузочных машин непрерывного действия с высокой производительностью и высокой частотой цикла работы погрузочного механизма должен быть использован только наиболее надежный и дешевый электропривод, а для наземных машин, работающих на больших складских или строительных площадках, — только дизельный привод.
Для электрического привода рабочих механизмов погрузочных машин применяются главным образом асинхронные электродвигатели общего назначения в закрытом обдуваемом исполнении с короткозамкнутым ротором. Для привода рабочих органов используются асинхронные двигатели того же исполнения с повышенным скольжением. Наземные погрузочные машины часто оборудуются электроприводом постоянного тока; при этом используются только сериесные двигатели.
Наиболее предпочтительным типом привода современных погрузочных машин является электрогидравлический как наиболее надежный, обеспечивающий плавное регулйрование усилий и скорости рабочих элементов машин и хорошо увязывающий работу основных (рабочий орган) и вспомогательных (гидроцилиндры подъема и поворота) элементов погрузочной машины. В погрузочных машинах, оборудованных гидравликой, для привода рабочих механизмов применяются гидравлические цилиндры и гидродвигатели. Так в гребковых погрузочных машинах типа ПМС цилиндры служат для подъема и опускания рукоятки цилиндры для складывания и выбрасывания гребка; цилиндры осуществляют подъем и опускание всего питателя цилиндр поворачивает платформу с питателем вправо и влево от среднего положения, что обеспечивает необходимый фронт погрузки у колесно-рельсовых машин и сокращает объем маневровых операций у машин на гусеничном ходу. Цилиндры поднимают и опускают перегружатель, а—9 поворачивают перегружатель в горизонтальной плоскости.
Размещение левого цилиндра на питателе погрузочной машины типа ПМС-2 видно на рис. 3. Корпус цилиндра укреплен шарнирно на раме конвейера, а шток закреплен на рукояти. При подаче масла в нижнюю полость цилиндра рукоять поднимается. Опускание гребка под действием собственного веса легко выполняется при помощи специальных гидравлических клапанов в системе.
Типовая конструкция гидроцилиндра (погрузчика Т-157) представлена на рис. 4. Гидроцилиндр состоит из гильзы, крышки с воздухоспускным клапаном, ступицы, уплотнительных манжет, штока с поршнем и уплотнительными манжетами
7. Манжеты изготовлены из маслостойкой резины. Цилиндры цапфами шарнирно устанавливаются в подшипниках верхней части опоры.
Рабочее давление масла в гидравлических системах погрузочных машин обычно принимается в пределах 80—120 кГ/см2, что диктуется высокими усилиями, характерными для рабочих механизмов и ограниченными габаритными размерами машин.
Для вращения рабочих механизмов (ходовой части, погрузочных органов, конвейера и т. д.) используются гидродвигатели. Гидродвигатель типа НПА-64, используемый для привода нагребающих лап погрузочной машины УП-2, состоит из разъемного корпуса, в котором размещены на подшипниках приводной вал, блок гидроцилиндров и маслораспреде-лительный механизм. Масло, подводимое под давлением к входному штуцеру, поступает в кольцевой канал распределительного механизма и далее — в рабочую полость цилиндров. Поршень со штоком перемещаясь поступательно, упирается сферической опорой в шайбу, размещенную под углом к плоскости цилиндров. Благодаря этому осуществляется поворот шайбы с валом. Распределительный механизм механически карданом связан с валом, вращается с ним вместе, и масло последовательно поступает в цилиндры, обеспечивая непрерывное вращение вала.
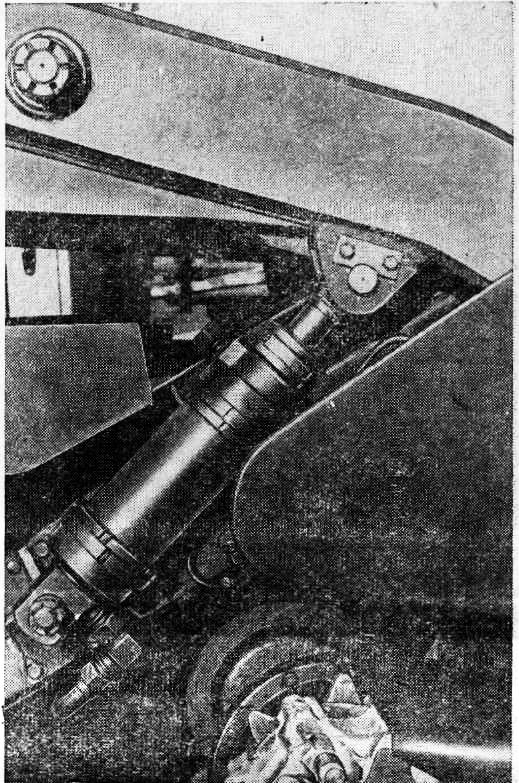
Рис. 3. Размещение гидроцилиндра на питателе погрузочной машины ПМС-2.
Высокомоментные радиально-поршневые гидродвигатели типа ВГД-410 установлены на привод гусеничного хода погрузочной машины ПНБ-3 (институт Гипроуглемаш). Крутящий момент на валу двигателя при давлении масла 100 кГ/см2 достигает 480 кГм, а максимальная скорость вращения вала не превышает 110 об/мин, что позволяет использовать двигатели в упрощенной безредукторной схеме.
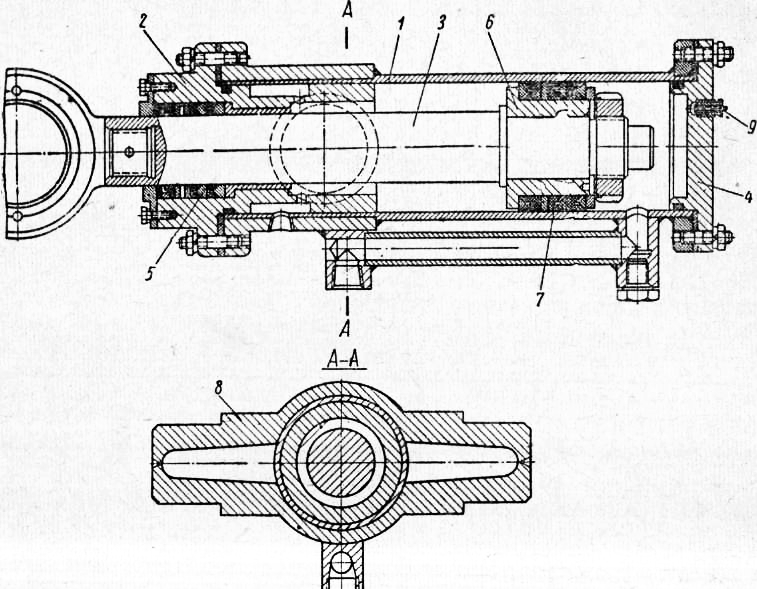
Рис. 4. Гидравлический цилиндр.
Пневматический привод используется для шахтных погрузочных машин по условиям безопасности (в шахтах, особо опасных по газу) или же в тех случаях, когда весь комплекс проходческого оборудования работает на сжатом воздухе.
В погрузочных машинах применяются поршневые и ротационные пневматические двигатели. Отечественные серийные машины оборудуются поршневыми пневматическими двигателями типа МП-5 или ДР-10. Двигатель для удобства монтажа изготовляется во фланцевом исполнении. В корпусе I укреплены болтами пять рабочих цилиндров, расположенных по окружности под углом 72° друг к другу. В каждом цилиндре помещен поршень с кольцами. Для превращения возвратно-поступательного движения поршней двигатель оборудован кривошипно-шатунным механизмом, состоящим из шатунов и коленчатого вала. Каждый шатун головкой соединен пальцем с поршнем, а ножкой опирается на вкладыш. Коленчатый вал монтируется на двух шарикоподшипниках, укрепленных в корпусе и крышке. Конец коленчатого вала со стороны фланца имеет шлицевое отверстие, в которое входит вал редуктора погрузочной машины.
Для распределения сжатого воздуха по рабочим цилиндрам на двигателе смонтировано золотниковое устройство, состоящее из втулки, распределительного валика и коробки золотника. Золотник приводится во вращение коленчатым валом, сжатый воздух через каналы и прорези поступает в цилиндры или выходит из них.
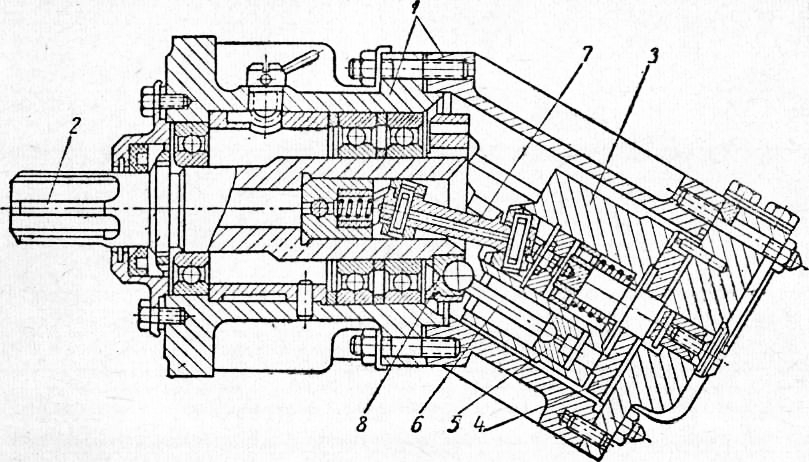
Рис. 5. Гидродвигатель НПА-64.
С 1960 г. заводом «Пневматика» серийно выпускается двигатель ДР-10у мощностью до 12 л. е., спроектированный на базе двигателя ДР-10. Все основные узлы и детали унифицированы с двигателями ДР-5у и ДР-13. Для новых погрузочных машин МПУ-1 создаются более мощные двигатели типа ДРП-16, имеющие большие сечения каналов, подводящих сжатый воздух к цилиндрам. Мощность двигателя 16 л. с. при 670 об/мин выходного вала. На заводе «Коммунист» изготовляются двигатели МП-18 мощностью 18 л. с. и номинальным числом оборотов 600 в минуту, предназначенные для ковшово-конвейерных тяжелых машин типа ПМЛ-8.
Основными тенденциями развития конструкций пневматических двигателей погрузочных машин являются увеличение мощности, усовершенствование конструкций воздухораспределения и повышение коэффициента полезного действия.
Ротационные двигатели проще по конструкции и меньше по размерам по сравнению с поршневыми, так как в них отсутствует кривошипно-шатунный механизм, а также ‘золотниковое воздухо-распределение. Недостатком ротационных двигателей является недостаточное уплотнение рабочих камер, быстрый износ лопаток и шум при работе.
Дизельный привод имеет особое значение применительно к машинам, предназначенным для геологоразведочных работ, а также для мощных ковшовых машин, работающих в камерах большого сечения, где затруднительна подводка к машине и малонадежна эксплуатация силовых коммуникаций (кабелей и воздухопроводов).
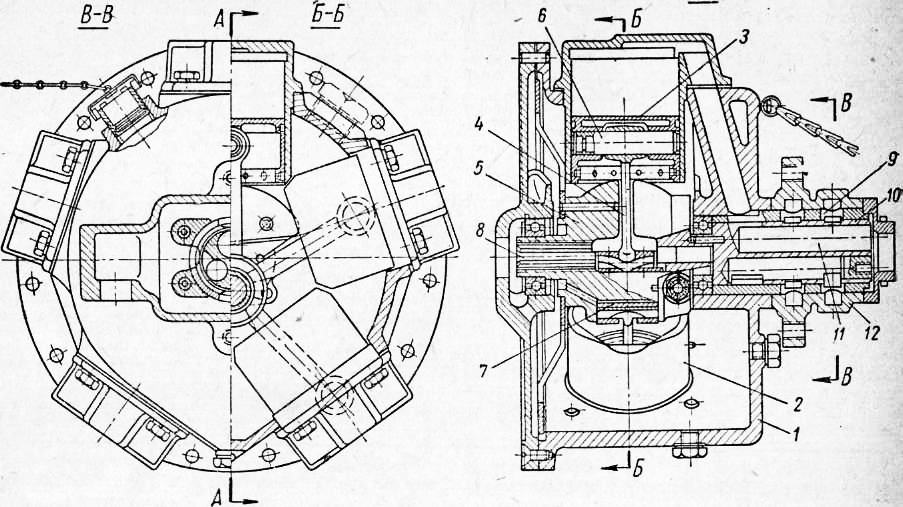
Рис. 6. Пневматический двигатель типа ДР-10.
Для наземных погрузочных машин обычно используются стандартные автотракторные двигатели внутреннего сгорания (карбюраторные или дизели). Недостатками их являются: чувствительность двигателя к неизбежным кратковременным перегрузкам, возникающим при погрузке насыпных грузов; сложность запуска двигателя при температуре ниже нуля; отсутствие плавного регулирования скорости; большая стоимость ремонта и эксплуатации.
Для подземных погрузочных машин необходимо создать специальные двигатели внутреннего сгорания левую часть приемной плиты по шарниру вместе с лапами и их приводами. Таким образом обеспечивается необходимый фронт захвата нагребающих лап при минимальной транспортной ширине машины.
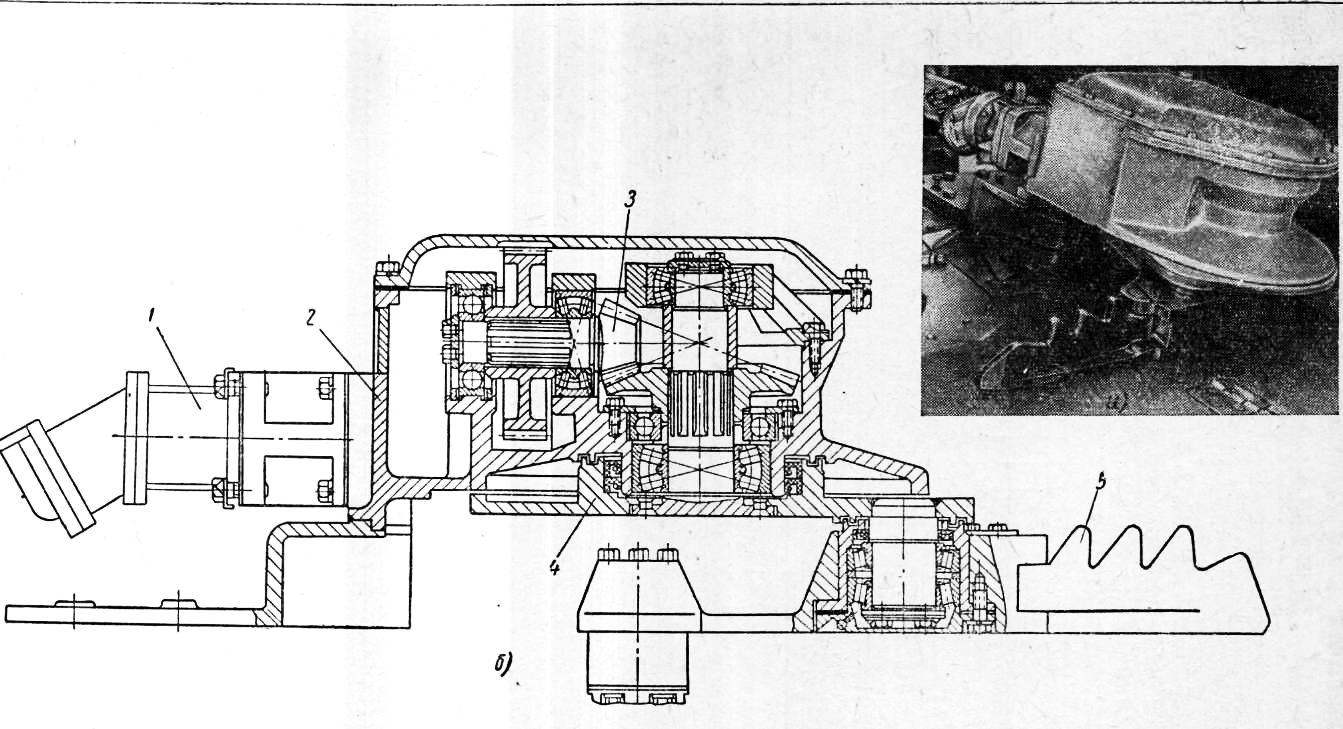
Рис. 7. Привод рабочего органа погрузочной машины УП-2.
Верхняя крышка редуктора, закрепленная на болтах, открывает свободный доступ к шестерням и подшипникам, которые размещены в масляной ванне, а выходной вал внизу имеет Манжетное уплотнение. Лапы закреплены шарнирно, поэтому не наблюдается заклинивание материала при обратном движении лап.
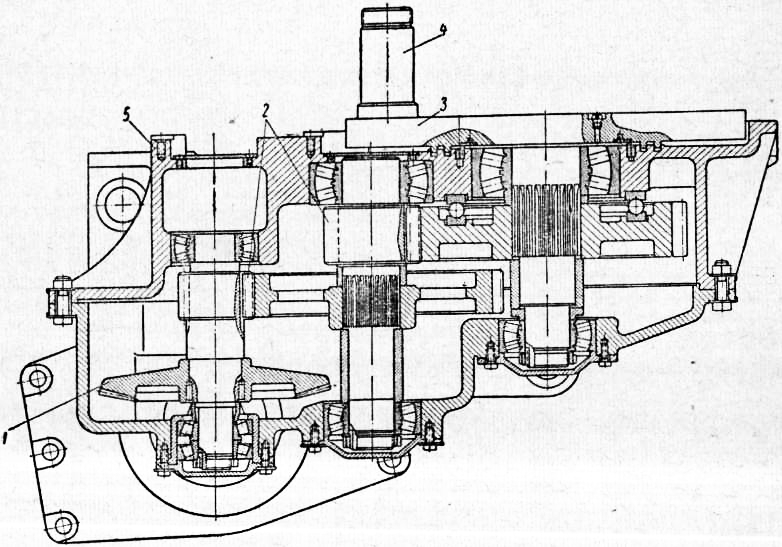
Рис. 8. Редуктор привода лап погрузочной машины ПНР-1.
Индивидуальный гидропривод нагребающих лап значительно улучшает рабочую характеристику и позволяет уменьшить ширину машины. Однако недостатком схемы является нарушение синхронизации движения лап.
Для синхронизации движения парных рабочих органов (лап, дисков) их привод обычно осуществляется от общего редуктора. Конструкция редуктора привода правой лапы погрузочной машины типа ПНР-1 видна на рис. 8.
Аналогичный по конструкции редуктор расположен с левой стороны приемной плиты. Оба редуктора кинематически связаны общим валом, который передает движение на конические шестерни и далее через две пары цилиндрических шестерен на приводные диски лап. Редуктор размещается под приемной плитой, на уровень которой выводится лишь диск с пальцем для сообщения движения непосредственно лапе. Шестерни заключены в литой разъемный корпус.
Доступ к редуктору при такой компоновке усложняется, однако исключается опасность заклинивания кусков насыпного груза.
В связи с тем, что привод парных рабочих органов расположен в непосредственной близости к штабелю насыпного груза, повышаются требования к защите корпуса редуктора от попадания пыли и влаги. Это достигается с помощью лабиринтных и манжетных уплотнений.
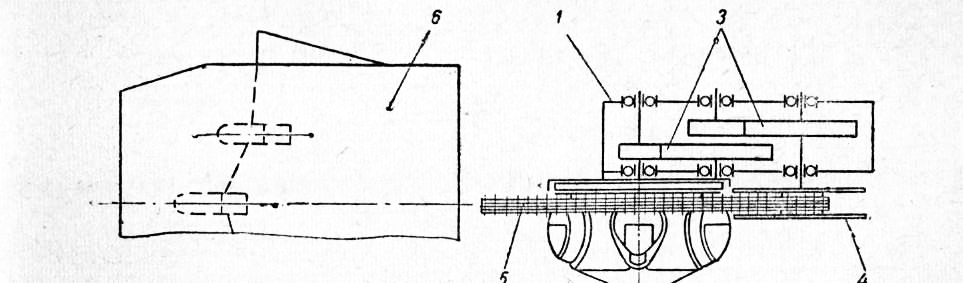
Рис. 9. Кинематическая схема привода ковша погрузочной машины ПМЛ-8М.
В наиболее распространенных погрузочных машинах с ковшом; на катящейся рукояти привод рабочего органа осуществляется при помощи механических редукторов. На рис. 9 приведена кинематическая схема привода ковша погрузочной машины типа ПМЛ-8М. На закрепленном болтами к поворотной платформе корпусе редуктора прифланцован двигатель типа МП-18.
Редуктор обычно состоит из двух пар цилиндрических шестерен, снижающих число оборотов выходного вала, на котором располагается бобина на последнюю навивается многорядная пластинчатая цепь. Противоположный конец цепи закреплен к кулисам ковша; поэтому когда цепь наматывается на бобину, ковш поднимается. Опускание ковша происходит под действием силы тяжести..
Для электропривода особенно характерны динамические знакопеременные нагрузки, поэтому в электрических ковшовых погрузочных машинах применяются двигатели кранового типа, устанавливают фрикционные муфты и предусматриваются специальные пружинные предохранительные устройства.
Отмеченные недостатки отсутствуют в случае привода ковша от силовых пневматических цилиндров. На рис. 10 представлена схема привода погрузочной машины типа МПДР-0,12. Силовой пневматический цилиндр закреплен на цапфах, шток соединен с шарнирной рукоятью ковша. При включении сжатого воздуха ковш поворачивается вначале относительно нижнего шарнира, а затем — верхнего шарнира. В конце движения ковш разгружается в бункер. Подвеска цилиндра позволяет использовать его для разгрузки бункера. Ковш фиксируется в верхнем положении, открывается защелка бункера и при подаче сжатого воздуха в цилиндр бункер опрокидывается относительно шарни для разгрузки.
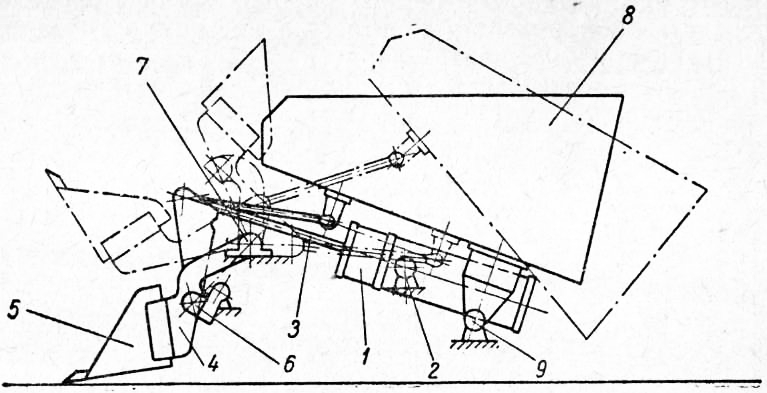
Рис. 10. Схема привода ковша и бункера погрузочно-доставочной машины МПДР-0,12.
Для увеличения усилий принят цилиндр со сдвоенными поршнями (рис. 11). Корпус цилиндра состоит из двух половин, соединенных жесткой перемычкой. На штоке закреплены поршень одностороннего действия и поршень двухстороннего действия. При подаче сжатого воздуха через вводы в левые полости цилиндра шток перемещается направо под действием удвоенных усилий, обеспечиваемых поршнями. Осуществляется вырыв ковша из штабеля насыпного груза. Поскольку для опускания ковша не требуется больших усилий, сжатый воздух подается через ввод в правую полость цилиндра над поршнем, левые же полости обеих половин цилиндров соединяются с атмосферой и шток под действием поршня перемещается влево.
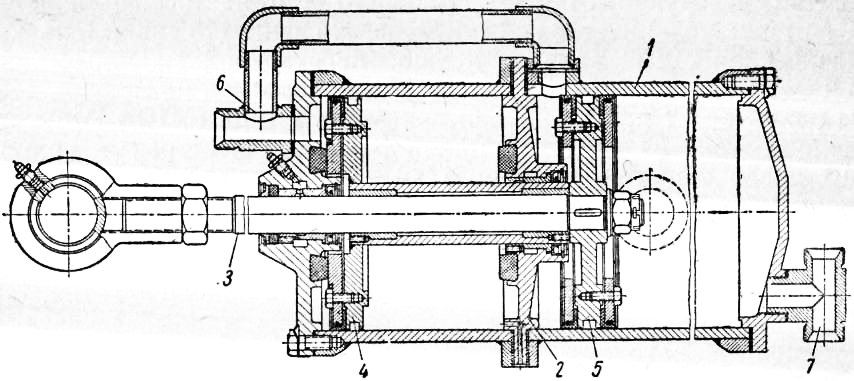
Рис. 11. Силовой цилиндр машины МПДР-12.
В ковшовых машинах ступенчатой погрузки ковш укреплен шарнирно на рукояти при помощи двух корабельных цепей, которые наматываются на барабаны. При одновременном включении двух барабанов ковш поднимается в вертикальной плоскости. Опускание ковша происходит под действием силы тяжести.
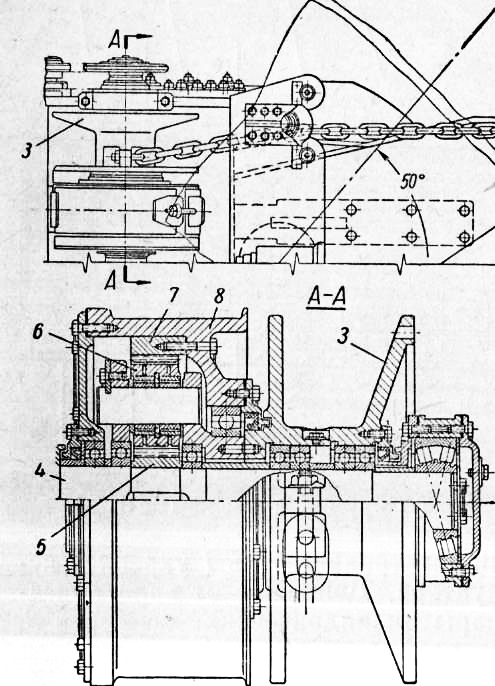
Рис. 12. Привод рабочего органа погрузочной машины ППМ-5.
Механизм подъема ковша представляет собой два одинаковых планетарных редуктора, смонтированных на общем валу. Вращение барабану передается через ведущие шестерни, сателлитные шестерни, зубчатый венец. При торможении ленточным тормозом корпуса редуктора подъемный барабан приводится в движение. В расторможенном состоянии сателлитные шестерни совершают планетарные движения, свободно перекатываясь по внутренней шестерне зубчатого венца и ведущей шестерне.
Привод вибрационных лотков, захватывающих и транспортирующих насыпной груз, может осуществляться от гидровибраторов или от эксцентриковых механизмов. Конструкция приводного вала вибрационного лотка машины типа 2ПНВ-1 приведена на рис. 13. Приводной вал укреплен в роликовых подшипниках на опорах. Вращение от двигателя передается клиноременной передачей на шкив. Если включается фрикционная муфта при помощи механизма, то движение передается на приводной вал. На обоих концах вала размещены в подшипниках эксцентрики, сообщающие шатунам колебательные движения. Шатуны связаны непосредственно с вибрационным лотком.
Привод ходового механизма наиболее простое конструктивное решение имеет при колесно-рельсовом ходе погрузочной машины. Для получения максимальных напорных усилий все колеса рельсовых погрузочных машин выполняются приводными (ведущими), поэтому рамой машины чаще всего служит корпус редуктора. В качестве примера на рис. 14 представлен редуктор ходовой части машины 2ПНВ-1. Фланцевый электродвигатель укреплен непосредственно на корпусе редуктора. Движение от вала двигателя передается через четыре пары цилиндрических шестерен, понижающих число оборотов на приводной вал. Полускаты связаны с приводным валом закрытыми цепными передачами. Для отключения полускатов от двигателя, что бывает необходимо при транспортировании машины, редуктор снабжен кулачковыми муфтами. Эти же муфты обеспечивают включение маневровой и рабочей скорости движения машины.
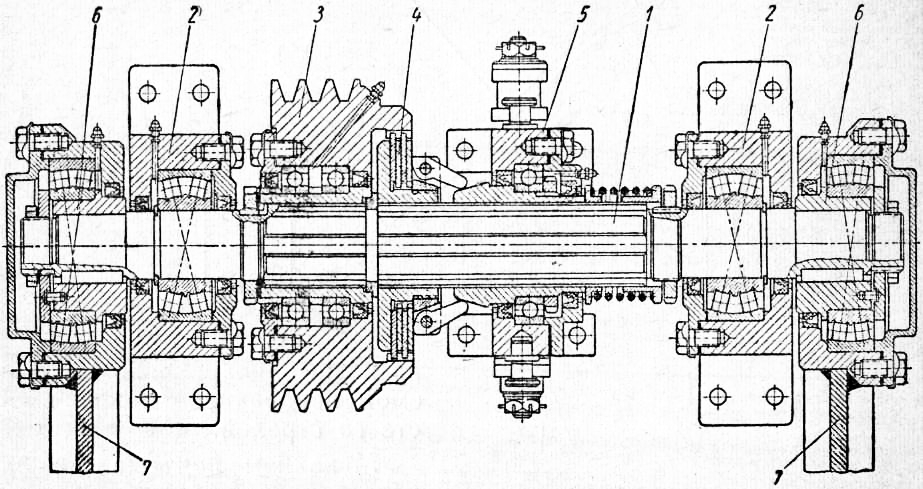
Рис. 13. Привод вибрационного лотка погрузочной машины 2ПНВ-1.
В целях унификации и упрощения обслуживания мощность и марка ходового двигателя в отечественных погрузочных машинах часто принимается той же, что и для привода рабочего органа. В некоторых зарубежных конструкциях погрузочных машин мощность двигателя рабочего органа на 20—25% выше мощности двигателя ходового механизма; такое решение обеспечивает более надежное черпание и вывод ковша из штабеля.
Привод ходовой части современных гусеничных погрузочных машин осуществляется чаще отдельными двигателями на каждую гусеницу через индивидуальные редукторы, что упрощает управление при поворотах машины; кроме того, уменьшаются габариты и значительно облегчаются монтаж и ремонт машин. На рис. 15 помещена конструктивная компоновка редуктора ходовой части погрузочной машины типа УП-2.
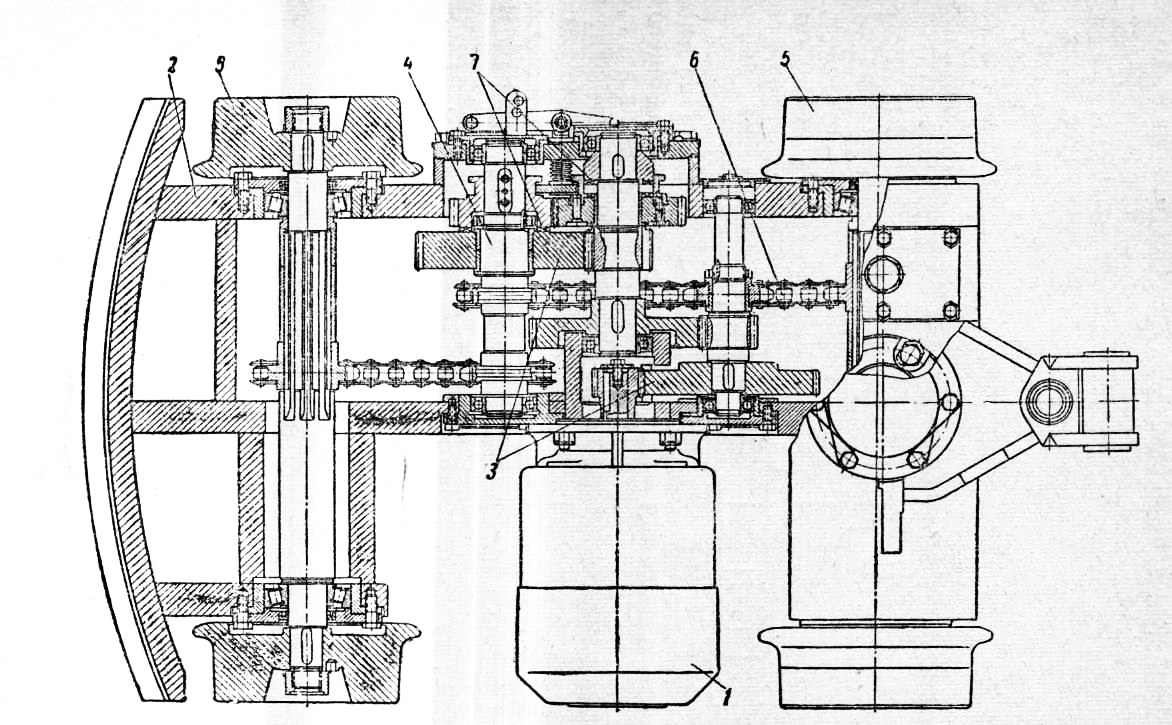
Рис. 14. Редуктор ходовой части погрузочной машины 2ПНВ-1.
Каждая гусеница приводится от самостоятельной кинематической цепи редуктора. От приводной конической шестерни, связанной с двигателем, движение передается через две пары цилиндрических шестерен на звездочку гусеничного хода. Шестерни обеих передач размещены в общем корпусе, который используется в качестве рамы ходовой части.
Гусеничная ходовая часть малогабаритных погрузочных машин иногда компонуется в виде двух самостоятельных узлов, состоящих из двигателя, редуктора и гусеницы. При использовании общего двигателя на две гусеницы включение каждой из них производится через фрикционные муфты.
Привод пневмо-шинного хода погрузочных машин общего назначения, работающих на складах и в портах, обычно выполняется на базе серийных конструкций автомобилей или тракторов, В качестве двигателей пневмошинного хода используются электродвигатели или двигатели внутреннего сгорания. Наиболее прогрессивным решением является встроенный в колеса индивидуальный привод, отличающийся наибольшей компактностью, простотой монтажа и замены.
Привод передаточных конвейеров погрузочных машин осуществляется с отбором мощности от двигателя рабочего органа или от индивидуальных двигателей. В последних конструкциях погрузочных машин привод конвейеров обычно осуществляется от 212 двух двигателей небольшой мощности, что обеспечивает компактную конструкцию и удобное обслуживание машины.
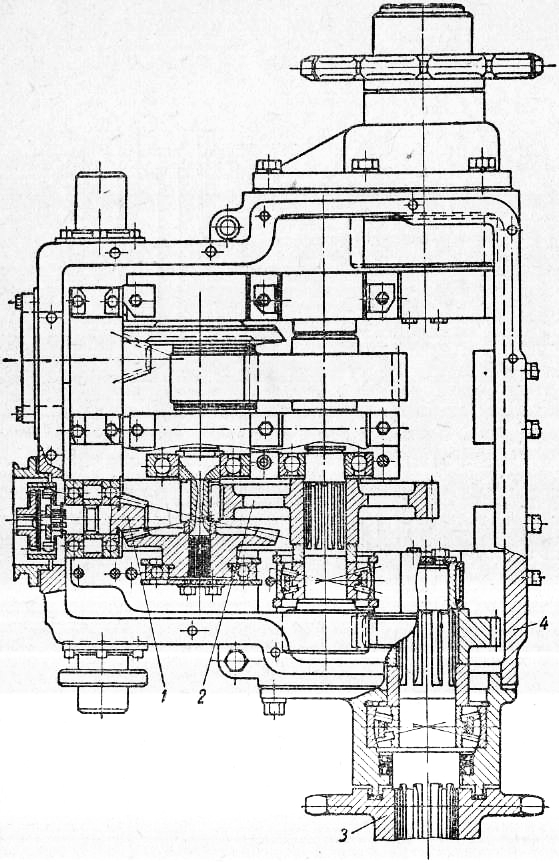
Рис. 5. Редуктор ходовой части погрузочной машины УП-2.
Один из приводов пластинчатого конвейера погрузочной машины ПНР-1 приведен на рис. 6. Фланцевый электродвигатель мощностью 4,5 кет прикреплен болтами к корпусу редуктора. От двигателя движение передается через коническую передачу и две пары цилиндрических шестерен, снижающих число оборотов вала, который муфтой соединяется с пршюдрым валом конвейера. Редуктор размещается непосредственно на раме конвейера.
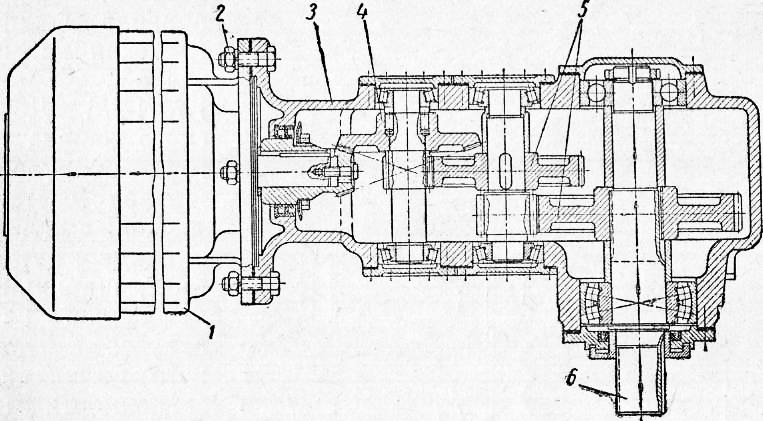
Рис. 6. Привод пластинчатого конвейера погрузочной машины ПНР-1,
При установке на машине двух тарвейеров для привода перегружателя, как правило, используется отдельной двигатель, который обычно размещается на стреле, около разгрузочной головки. Приводной барабан ленточных конвейеров иногда размещается ближе к месту крепления рамы конвейера и корпусу машины.
Приводы конвейеров работают в лучших условиях по сравнению с приводами рабочего органа и ходового механизма погрузочных машин, так как они не испытывают столь высоких динамических усилий. Механическая защита конвейерных двигателей обычно не предусматривается.
Поворот платформы с рабочим органом погрузочных машин с рельсовым перемещением осуществляется на 30—45° от продольной оси для погрузки породы с боков выработки. Платформа ковшовых погрузочных машин обычно поворачивается вручную в рабочее положение, а специальный механизм автоматически возвращает платформу с заполненным ковшом в центральное положение. Поворотный механизм состоит из барабана с профильным вырезом, рычага, соединенного с кулисой, и ролика, закрепленного на ходовой части машины. При опущенном положении ковша ролик размещен в широкой части выреза барабана, поэтому платформа может свободно поворачиваться. Одновременно с подъемом ковша ролик обегает профилированный скос барабана, поворачивая верхнюю часть машины в центральное положение.
В последних моделях ковшовых машин поворот платформы механизирован. Привод поворотного механизма состоит из 2—3 ступенчатых редукторов с пневмо- или гидроцилиндрами, а в отдельных конструкциях с индивидуальными двигателями.
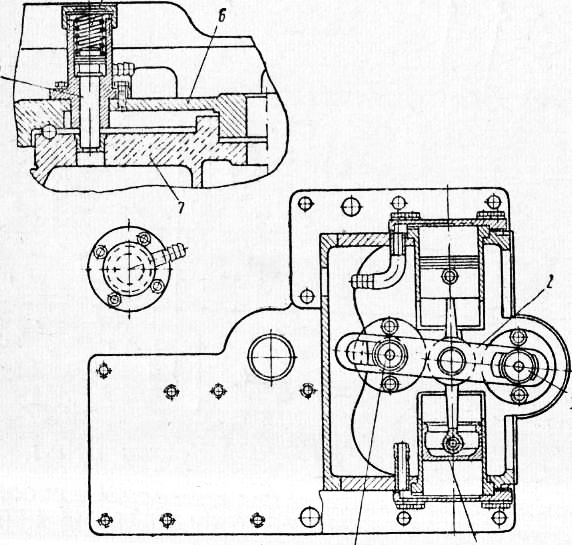
Рис. 7. Привод поворотного механизма погрузочной машины ПМЛ-5М.
На рис. 7 помещена конструкция привода поворотного механизма погрузочной машины
Привод состоит из двух пневматических цилиндров, рычага, шарнирно закрепленного на двух полуосях и стопорного цилиндра. В зависимости от того, в какой цилиндр подводится сжатый воздух, происходит поворот платформы вправо или влево. Шток стопорного цилиндра под действием пружины фиксирует положение платформы. При подаче сжатого воздуха в нижнюю полость стопорного цилиндра шток поднимается, отсоединяя поворотную платформу от ходовой части. Возврат платформы в центральное положение автоматически выполняется этими же пневмоцилиндрами благодаря специальной блокировке кранов управления.
Погрузочные машины непрерывного действия чаще имеют гидравлическую систему для выполнения вспомогательных операций, поэтому повороты платформы осуществляются гидроцилиндрами. В погрузочных машинах с колесно-рельсовым передвижением часто устанавливаются дополнительные цилиндры для отталкивания загруженных вагонеток, для разравнивания породы в кузове вагонетки и других операций.
Рекламные предложения:
Главная → Справочник → Статьи → Форум
Механизация земляных работ
Механизация строительства
Механизация дорожных работ
Автоматизация строительства
→ Бетонные работы
→ Мини-тракторы
 Разделы
Разделы
Строительные машины и оборудование
→ Для специальных земляных работ
→ Дорожно-строительные машины
→ Строительное оборудование
→ Асфальтоукладчики и катки
→ Большегрузные машины
→ Строительные машины, часть 2,
→ Дорожные машины, часть 2
→ Ремонтные машины
→ Ковшовые машины
→ Автогрейдеры
→ Экскаваторы
→ Бульдозеры
→ Скреперы
→ Грейдеры
Эксплуатация строительных машин
→ Эксплуатация средств механизации
→ Эксплуатация погрузочных машин
→ Эксплуатация паровых машин
→ Эксплуатация экскаваторов
→ Эксплуатация подъемников
→ Эксплуатация кранов перегружателей
→ Эксплуатация кузовов машин
→ Крановщикам и стропальщикам
Ремонт строительных машин
Ремонт дорожных машин
Ремонт лесозаготовительных машин
Ремонт автомобилей КАмаЗ
Техническое обслуживание автомобилей
Очистка автомобилей при ремонте
Материалы и шины
Остались вопросы по теме:
"Типы приводов"
— воспользуйтесь поиском.
→ Машины городского хозяйства
→ Естественная история машин
→ Транспортная психология
→ Пожарные автомобили
→ Автомобили-рефрижераторы
→ Монтаж и эксплуатация лифтов
→ Тракторы