Строй-Техника.ру
Строительные машины и оборудование, справочник
Рассмотрим различные периоды работы механизма подъема. При установившемся движении момент на валу двигателя при подъеме номинального груза грузами момент потерь на трение в элементах механизма составляет значительную часть общего момента сопротивления. Ориентировочные значения к. п. д. при работе механизмов подъема с различными грузами можно принимать по экспериментальному графику, где цифры на кривых соответствуют значению к п д при полной (номинальной) нагрузке.
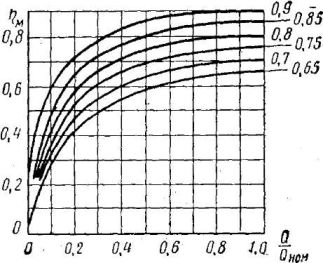
Рис. 1. Зависимость к.п.д. механизма от загрузки
Рекламные предложения на основе ваших интересов:
Дополнительные материалы по теме:
Момент статического сопротивления Мс в этом уравнении является потенциальным статическим моментом, связанным с изменением запаса потенциальной энергии груза. При подъеме груза происходит увеличение потенциальной энергии — статический момент от груза Мс препятствует движению (входит в уравнение со знаком плюс). При спуске груза происходит уменьшение запаса потенциальной энергии и Мс способствует движению груза (входит в уравнение со знаком минус). В последнем случае разгон системы осуществляется при совместном действии момента двигателя и статического момента груза.
Процесс торможения в механизме подъема принципиально не отличается от процесса пуска. Различие состоит в том, что при пуске разгон маховых масс совершается за счет потребления электроэнергии, а замедление и остановка маховых масс производится в результате совершения тормозом работы торможения. В процессе торможения кинетическая энергия вращающихся и поступательно движущихся масс переходит в тепловую энергию.
В этом уравнении содержатся две неизвестные величины — тормозной момент и время торможения. Изменение одной из них вызовет пропорциональное изменение другой.
Все механизмы подъема снабжаются автоматически действующими тормозами нормально замкнутого типа (с электромагнитным или электрогидравлическим приводом), автоматически размыкающимися при включении привода. В случае если эти механизмы имеют фрикционные или кулачковые муфты включения, то, согласно правилам Госгортехнадзора, они могут снабжаться управляемыми тормозами нормально замкнутого типа.
Механизмы подъема с ручным приводом снабжаются автоматически Действующими тормозами, замыкаемыми весом транспортируемого груза. Если по производственным условиям работы лебедки с ручным приводом требуется опускать груз со скоростью, превышающей скорость подъема, то допускается применение безопасных рукояток, у которых нормально замкнутое тормозное устройство размыкается нажатием на рукоятку и механизм получает возможность движения под действием веса груза. При этом скорость опускания груза регулируется путем притормаживания тормозного шкива усилием нажатия на рукоятку или с помощью специального центробежного Тормоза (регулятора скорости). Однако если лебедка предназначена для подъема людей, то ее снабжают такой безопасной рукояткой, конструкция которой допускает подъем и спуск только путем непрерывного вращения рукоятки. При этом скорость спуска не должна превышать 20 м/мин.
Применение в механизмах подъема груза управляемых тормозов нормально-разомкнутого типа не допускается.
Тормоз должен быть установлен на кинематическом звене механизма, жестко связанном с барабаном зубчатыми или червячными передачами. Для уменьшения величины тормозного момента и габаритных размеров тормоза его обычно устанавливают на приводном валу механизма или возможно ближе к нему. В этом случае тормоз работает на минимальный момент от груза и разгружает звенья кинематической цепи от влияния инерционных усилий (наибольшим запасом кинетической энергии обладает приводной вал с ротором двигателя). Если действия одного тормоза недостаточно, то на другом конце вала двигателя или редуктора или на каком-либо другом валу механизма устанавливают второй тормоз. Первый из этих случаев размещения дополнительного тормоза является более предпочтительным, так как оба тормоза могут быть идентичными; во втором случае тормоза различны по развиваемому тормозному моменту. Самотормозящие червячные передачи в механизме подъема не заменяют тормозов, так как по мере износа червячная пара теряет свойства самоторможения.
Механизмы подъема кранов и подъемных механизмов, транспортирующих расплавленный и раскаленный металл, ядовитые и взрывчатые вещества, на каждом приводе барабанов имеют по два тормоза, действующих независимо друг от друга. Коэффициенты запаса торможения каждого тормоза имеют следующие значения: для механизма подъема с одним или несколькими барабанами от одного двигателя h = 1,25; для механизмов подъема с двумя или несколькими барабанами от двух двигателей при установке одного тормоза на каждом приводе & = 1,25 и при установке двух тормозов на каждом приводе 1,1. При наличии на приводе указанных выше кранов двух и более тормозов запас торможения устанавливается в предположении, что весь груз удерживается одним тормозом.
В лебедках с электрическим приводом, предназначенных для подъема людей, применяют нормально-замкнутый колодочный тормоз. Коэффициент запаса торможения этого тормоза должен быть не менее двух.
В связи с тем, что определение тормозного момента ведут по номинальному грузу, остановка механизма при работе с грузами небольшой величины происходит более резко, так как при этом отношение неизменяемой величины тормозного момента к меньшим моментам от грузов возрастает, и замедления увеличиваются, что приводит к появлению высоких динамических напряжений в элементах механизма между валом, на котором установлен тормоз, и двигателем.
При одновременной установке в механизме подъема автоматического спускного (замыкаемого весом транспортируемого груза) и стопорного тормоза (например, в электроталях) значение коэффициента запаса торможения стопорного тормоза должно быть не менее 1,25, а спускного (грузоупорного) — не менее 1,1. Так как создаваемый спускным тормозом момент пропорционален весу транспортируемого груза, то он производит остановку грузов различного веса, практически с одинаковыми величинами замедлений.
Одновременная установка в механизме подъема стопорного и грузоупорного тормозов уменьшает динамические усилия в элементах механизма при спуске груза и соответственно повышает долговечность передач, особенно быстроходных ступеней, увеличивает плавность спуска груза; это позволяет осуществить спуск груза со скоростью, не превышающей скорость подъема, уменьшить размер стопорного тормоза, что, в свою очередь позволяет уменьшить габариты механизма, снизить нагрузку и нагрев электродвигателя, так как при спуске груза двигатель преодолевает лишь потери в элементах механизма. Указанные преимущества полностью компенсируют некоторое усложнение и Удорожание конструкции механизма из-за установки грузоупорного тормоза.
Наиболее опасные динамические нагрузки при работе механизма подъема возникают в случае подъема груза с подхватом при первоначально ослабленных канатах, когда груз рывком отрывается от опоры. При этом в момент отрыва груза весом Q грузозахватное устройство имеет некоторую скорость v, равную скорости установившегося движения. Нарастание нагрузки в канатах полиспаста происходит за весьма короткое время и величина нагрузки зависит от скорости подъема v, массы металлоконструкции и от приведенной жесткости системы, включающей в себя как жесткость грузовых органов, так и жесткость металлоконструкции крана.
До отрыва груза динамическое усилие, воспринимаемое грузовым органом, нарастает по линейному закону, а после отрыва груза, вследствие влияния упругих колебаний системы, — по синусоидальному закону.
Увеличение рабочей скорости приводит к соответствующему увеличению коэффициента динамичности и значений динамических нагрузок, которые могут достигать удвоенных статических нагрузок, что заставляет принимать повышенные запасы прочности всех деталей механизма и металлоконструкции крана. Длительные колебания всей системы вместе с грузом, возникающие при больших динамических нагрузках, затрудняют эксплуатацию крана.
Для снижения динамических нагрузок в конструкции некоторых механизмов подъема вводят пружинные, пневматические, гидравлические или гидропневматические амортизаторы, воздействующие на грузозахватное устройство или на грузовой орган. Применение пружинных амортизаторов достаточно эффективно только для кранец малых грузоподъемностей, так как при больших нагрузках пружины обладают высокой жесткостью. В этом отношении применение пневматических или гидравлических амортизаторов значительно целесообразнее, так как введение их в систему механизма подъема существенно уменьшает приведенную жесткость системы, увеличивает время нарастания нагрузки в грузовом органе, уменьшает время и амплитуду колебаний системы и способствует повышению устойчивости свободно стоящих поворотных кранов. Динамические нагрузки при применении этих устройств могут быть ограничены величиной 20—30% от стати* ческой нагрузки.
Рекламные предложения:
Главная → Справочник → Статьи → Форум
Механизация земляных работ
Механизация строительства
Механизация дорожных работ
Автоматизация строительства
→ Бетонные работы
→ Мини-тракторы
 Разделы
Разделы
Строительные машины и оборудование
→ Для специальных земляных работ
→ Дорожно-строительные машины
→ Строительное оборудование
→ Асфальтоукладчики и катки
→ Большегрузные машины
→ Строительные машины, часть 2,
→ Дорожные машины, часть 2
→ Ремонтные машины
→ Ковшовые машины
→ Автогрейдеры
→ Экскаваторы
→ Бульдозеры
→ Скреперы
→ Грейдеры
Эксплуатация строительных машин
→ Эксплуатация средств механизации
→ Эксплуатация погрузочных машин
→ Эксплуатация паровых машин
→ Эксплуатация экскаваторов
→ Эксплуатация подъемников
→ Эксплуатация кранов перегружателей
→ Эксплуатация кузовов машин
→ Крановщикам и стропальщикам
Ремонт строительных машин
Ремонт дорожных машин
Ремонт лесозаготовительных машин
Ремонт автомобилей КАмаЗ
Техническое обслуживание автомобилей
Очистка автомобилей при ремонте
Материалы и шины
Остались вопросы по теме:
"Установившееся движение, пуск и торможение механизма подъема"
— воспользуйтесь поиском.
→ Машины городского хозяйства
→ Естественная история машин
→ Транспортная психология
→ Пожарные автомобили
→ Автомобили-рефрижераторы
→ Монтаж и эксплуатация лифтов
→ Тракторы