Строй-Техника.ру
Строительные машины и оборудование, справочник
Обычно гидродвигатели приводов различных звеньев манипуляторов, в частности, гидроцилиндры, располагают на звеньях, с которыми непосредственно соединены приводимые звенья и относительно которых осуществляется их движение. Однако в некоторых случаях оказывается удобнее устанавливать гидродвигатели на основании или, по крайней мере, на некотором удалении от приводимого звена. Это может позволить упростить конструкцию манипулятора и уменьшить энергетические затраты при движении за счет снижения веса подвижных частей.
На рис. 1 показана схема привода кисти манипулятора, в которой гидроцилиндр установлен на колонне, а передача усилий на механизм кисти производится с помощью тросовой передачи. Приводы плеча и предплечья манипулятора, а также привод вращения кисти вокруг собственной оси на схеме не показаны. Тросовая передача состоит из силового троса, жестко закрепленного относительно штока гидродилиндра, направляющих блоков 5 и приводного блока кисти с рабочим органом. Трос огибает все блоки в одном направлении против часовой стрелки и крепится к блоку.
Движение штока гидроцилиндра приводит к повороту блока, вместе с кистью и рабочим органом. В то же время движения: плеча и предплечья манипулятора не вызывают поворот кисти вокруг горизонтальной оси. Это объясняется тем, что при одинаковых диаметрах блоков 5 и 7 и огибании их тросом в одном направлении изменение углов обхвата этих блоков одной ветвыш троса при движении плеча и предплечья компенсируется противоположным изменением угла обхвата этих блоков второй ветвьк троса.
Рекламные предложения на основе ваших интересов:
Дополнительные материалы по теме:
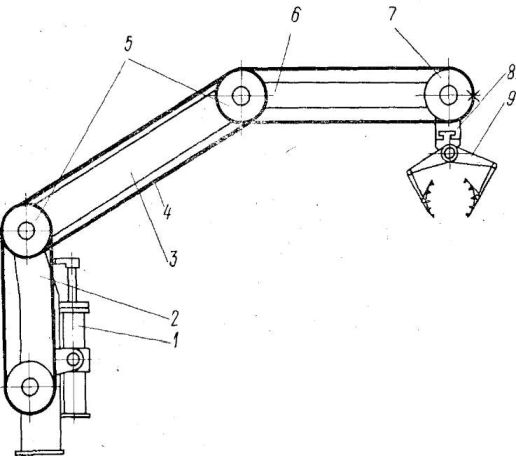
Рис. 1. Схема привода механизма кисти с гидроцилиндром, установленным на колонне, с тросовой передачей усилий
Такая схема привода может применяться не только для кисти| но и для других звеньев манипулятора. Поворот манипулятор вокруг вертикальной оси может осуществляться гидродвигатея лями вращения. Однако эти гидродвигатели являются конструкцитивно сложными, дорогими и дефицитными устройствами, поэтому в приводах поворота желательно использовать гидроцилиндры|
Вариант выполнения поворотного устройства, приводимой в движение гидроцилиндром, показан на рис. 2. На основание устанавливается стойка, выполненная в виде полого двух-заходного винта с витками большого хода. С верхним концом
стойки через самоустанавливающийся подшипник связана пово-потная платформа, опирающаяся на основание катками. В центральной части поворотной платформы располагается поводок с двумя вертикальными пазами. Гидроцилиндр, с помощью которого осуществляется поворот, крепится к верхнему фланцу поводка. На штоке поперек его оси закреплен палец, проходящий через два паза полого винта стойки и два паза поводка платформы. При движении штока с пальцем вдоль вертикальной оси под давлением жидкости происходит их вращение, поскольку палец при этом движется в винтовых пазах стойки. Это вращение через поводок передается поворотной платформе. Полный угол поворота платформы зависит от числа витков винтовых пазов стойки. Управление поворотом осуществляется с помощью любых Дроссельных устройств с регулируемым сопротивлением. Для поворота звеньев манипулятора может использоваться высокомоментный гидродвигатель с гидроцилиндром и шариковинтовым механизмом, схема которого показана на рис. 3. В корпусе гидродвигателя, выполняющем роль цилиндра и состоящем из двух половин, жестко закреплена гайка с винтовой нарезкой на внутренней поверхности. Поршень имеет винтовую нарезку на наружной нерабочей поверхности и связан с выходным валом гидродвигателя с помощью шлицевого соединения. В винтовых . канавках гайки и поршня размещены шарики. При подаче жидкости в одну из полостей цилиндра через отверстия в крышках поршень совершает винтовое движение относительно гайки и корпуса, заставляя вращаться выходной вал, перемещаясь вдоль него по шлицам. Этот гидродвигатель отличается относительно . простой конструкцией, может устойчиво работать при малых скоростях, а шариковинтовое соединение, выполненное на большом диаметре, и шлицевое соединение между поршнем и выходным валом способны передавать большие моменты.
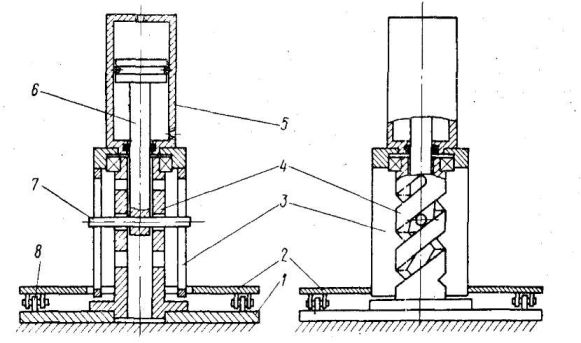
Рис. 2. Поворотное устройство, приводимое выдвижение гидроцилиндром
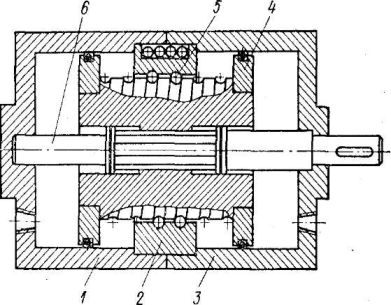
Рис. 3. Высоко-моментный гидродвигатель
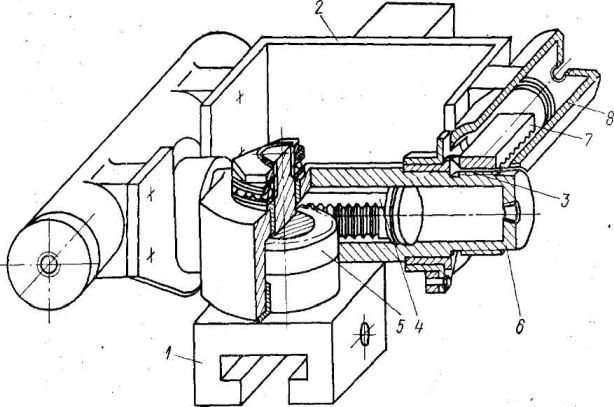
Рис. 4. Схема привода кисти манипулятора
Для поворота некоторых звеньев манипулятора конструктивно удобно использовать гидроцилиндры с передачами шестерня рейка.
Привод кисти манипулятора установлен на конце предплечья к которому жестко прикреплены два гидроцилиндра, осуществляющие поворот кисти вокруг горизонтальной оси. Плунжеры гидроцилиндров выполнены заодно с зубчатыми рейками, Сходящимися в зацеплении с зубчатыми колесами. Зубья этих колес нарезаны на концах гидроцилиндра, с помощью которого осуществляется поворот рабочего органа манипулятора, прикрепляемого к наконечнику вокруг собственной оси. Для этого плунжер гидроцилиндра изготовлен заодно с зубчатой рейкой, находящейся в зацеплении с колесом.
Подача жидкости в полости гидроцилиндров заставляет двигаться их плунжеры с рейками, что влечет за собой поворот гидроцилиндра вместе с рабочим органом манипулятора вокруг горизонтальной оси. В то же время подача жидкости в полости гидроцилиндра приводит к движению его плунжера с рейкой, которая, поворачивая зубчатое колесо, осуществляет поворот рабочего органа вокруг собственной оси.
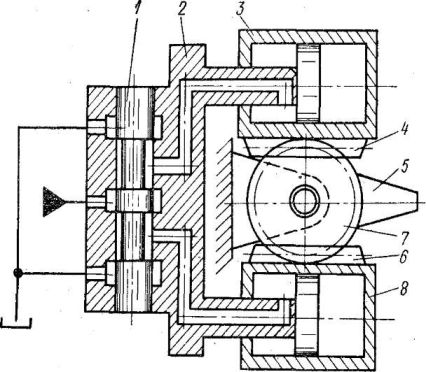
Рис. 5. Схема безлюфтового привода поворотного звена
В следящих приводах поворота, выполненных в виде гидроцилиндров с передачами шестерня—рейка, при изменении направления рабочего усилия вследствие боковых зазоров в зубчатом зацеплении могут возникать люфты, которые отрицательно сказываются на устойчивости равновесия привода и являются одной из причин возникновения вибрации. Эти люфты удается исключить при построении привода по схеме, показанной на рис. 5. Следящий привод управляется четырехщелевым золотником, корпус которого установлен на основании. Система передачи на золотник управляющих сигналов и сигналов обратной связи может быть выполнена по одной из рассмотренных ранее схем и на Рис. 5 не показана. Привод поворотного звена осуществляется двумя гидроцилиндрами, двигающимися относительно
закрепленных в основании поршней. С гидроцилиндрами жестко соединены зубчатые рейки, находящиеся в зацеплении с колесом, которое приводит в движение звено. Благодаря тому, что каждый гидроцилиндр имеет лишь одну рабочую полость, всегда находящуюся под избыточным давлением, боковые зазоры между правой стороной зубьев реек и левой стороной зубьев колеса всегда отсутствуют, что исключает возможность возникновения люфтов в приводе.
Одной из причин возникновения вибраций следящих приводов является упругость их элементов и, в частности, трубопроводов.
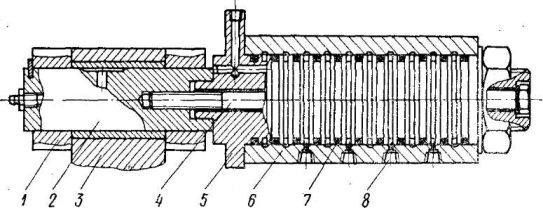
Рис. 6. Конструкции маслопроводящих шарниров манипулятора
В связи с этим применение гибких резиновых шлангов для соединения золотников с гидроцилиндрами нежелательно. Гидравличе ские магистрали лучше выполнять в виде жестких медных или стальных труб, которые позволяют производить компактный монтаж и удобнее в эксплуатации по сравнению со шлангами. Однако при этом возникает проблема передачи жидкости через шарнирные соединения подвижных звеньев манипулятора. Эта проблема может быть решена при использовании маслопроводящих шарниров, один из вариантов конструктивного выполнения которых показан на рис. 6.
Маслопроводящий шарнир крепится к торцу пальца шарнирного соединения звеньев манипулятора с помощью винта. Таким образом, пробка маслопроводящего шарнира зафиксирована относительно пальца и, следовательно, звена манипулятора. Обойма маслопроводящего шарнира имеет возможность поворачиваться относительно пробки вместе со звеном и прикрепленными к нему трубопроводами. Эти трубопрс воды присоединяются к резьбовым коническим отверстиям Жидкость из этих отверстий попадает в кольцевые проточки пробки и через радиальные отверстия в осевые каналы, сообщающиеся с резьбовыми отверстиями в пробке, к которым присоединяются трубопроводы звена. Кольцевые проточки пробки уплотняются резиновыми кольцами. Выводы из проточек, расположенных между отверстиями, находятся в плоскости перпендикулярно чертежу.
В Ленинградском технологическом институте холодильной промышленности построен погрузочный манипулятор, следящие приводы звеньев которого и тросовые передачи управляющих сигналов и сигналов обратной связи выполнены по схемам, рассмотренным в настоящей главе. Управление манипулятором осуществляется оператором с помощью механического устройства. Манипулятор имеет поворотные плечо и предплечье, снабженное выдвижной частью, на конце которой установлен механизм кисти, способный поворачиваться вокруг горизонтальной и собственной осей. Поворот манипулятора вокруг вертикальной оси производится с помощью поворотного устройства, которое управляется спаренным дросселем, снабженным педалями.
Для предотвращения падения плеча и предплечья манипулятора при снижении давления в гидросистеме по какой-либо причине в трубопроводах, соединяющих следящие золотники с гидроцилиндрами этих звеньев, установлены напорные золотники, управляемые давлением нагнетания. При наличии давления в гидросистеме они полностью открыты, а при его падении запирают слив из гидроцилиндров.
Питание всех приводов манипулятора жидкостью осуществляется от одной насосной станции. Поскольку манипулятор является машиной периодического действия, его энергетическая экономичность может быть значительно повышена при установке в линии нагнетания гидроаккумулятора.
Рекламные предложения:
Главная → Справочник → Статьи → Форум
Механизация земляных работ
Механизация строительства
Механизация дорожных работ
Автоматизация строительства
→ Бетонные работы
→ Мини-тракторы
 Разделы
Разделы
Строительные машины и оборудование
→ Для специальных земляных работ
→ Дорожно-строительные машины
→ Строительное оборудование
→ Асфальтоукладчики и катки
→ Большегрузные машины
→ Строительные машины, часть 2,
→ Дорожные машины, часть 2
→ Ремонтные машины
→ Ковшовые машины
→ Автогрейдеры
→ Экскаваторы
→ Бульдозеры
→ Скреперы
→ Грейдеры
Эксплуатация строительных машин
→ Эксплуатация средств механизации
→ Эксплуатация погрузочных машин
→ Эксплуатация паровых машин
→ Эксплуатация экскаваторов
→ Эксплуатация подъемников
→ Эксплуатация кранов перегружателей
→ Эксплуатация кузовов машин
→ Крановщикам и стропальщикам
Ремонт строительных машин
Ремонт дорожных машин
Ремонт лесозаготовительных машин
Ремонт автомобилей КАмаЗ
Техническое обслуживание автомобилей
Очистка автомобилей при ремонте
Материалы и шины
Остались вопросы по теме:
"Элементы гидравлических приводов звеньев манипуляторов"
— воспользуйтесь поиском.
→ Машины городского хозяйства
→ Естественная история машин
→ Транспортная психология
→ Пожарные автомобили
→ Автомобили-рефрижераторы
→ Монтаж и эксплуатация лифтов
→ Тракторы