Строй-Техника.ру
Строительные машины и оборудование, справочник
Поскольку необходимо иметь возможность перемещать грузы по любой траектории в пределах обслуживаемой зоны с различными скоростями и останавливать их в любой ее точке, желательно, чтобы привод звеньев манипуляторов был следящим, т. е. позволял осуществлять регулирование положения и скорости исполнительного органа в зависимости от величины и направления управляющего сигнала, обеспечивая соответствие с возможно малой ошибкой положения или скорости исполнительного органа управляющему сигналу. Кроме того, применение следящих приводов звеньев манипулятора позволяет регулировать положение всех или нескольких звеньев с помощью одного управляющего устройства. При этом сигнал от управляющего устройства, а также сигнал обратной связи по каждой координате перемещения необходимо передавать к следящим золотникам гидравлического привода. Для этой цели наиболее экономична тросовая передача, отличающаяся конструктивной простотой и надежностью в эксплуатации. Такая передача отличается малой стоимостью, не требует применения каких-либо сложных или дефицитных элементов и может эксплуатироваться практически в любых условиях.
Принципиальная схема одного из вариантов выполнения гидравлического следящего привода стрелы манипулятора показана на рис. III. Ветвь троса, жестко закрепленного на управляющем устройстве с задающим блоком, огибает блок и крепится к следящему золотнику с левой стороны. Ветвь троса, охватывающая блоки, крепится к следящему золотнику справа; корпус золотника установлен на стреле и перемещается вместе с ней.
Жидкость от насосной станции подается в среднюю выточку втулки золотника и через щель, образованную правой кромкой среднего пояска золотника и кромкой выточки, проходит в нижнюю полость гидроцилиндра, а через щель между левой кромкой среднего пояска золотника и кромкой выточки проходит в верхнюю полость гидроцилиндра. Слив жидкости из полостей цилиндра может происходить через щели, образуемые кромками крайних поясков золотника и кромками крайних выточек его втулки.
Рекламные предложения на основе ваших интересов:
Дополнительные материалы по теме:
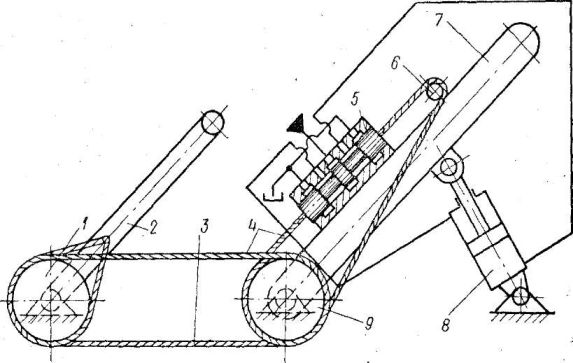
Рис. 1. Схема гидравлического следящего привода манипулятора с установкой золотника на приводном звене
При отсутствии нагрузки на гидроцилиндр и неподвижном поршне золотник находится в таком положении относительно втулки, при котором размеры проходных щелей обеспечивают в полостях цилиндра давления обратно пропорциональные рабочим площадям поршня. Смещение золотника из этого нейтрального положения приводит к возникновению в полостях гидроцилиндра дополнительного перепада давлений, под действием которого поршень начинает двигаться либо поддерживает внешнюю нагрузку.
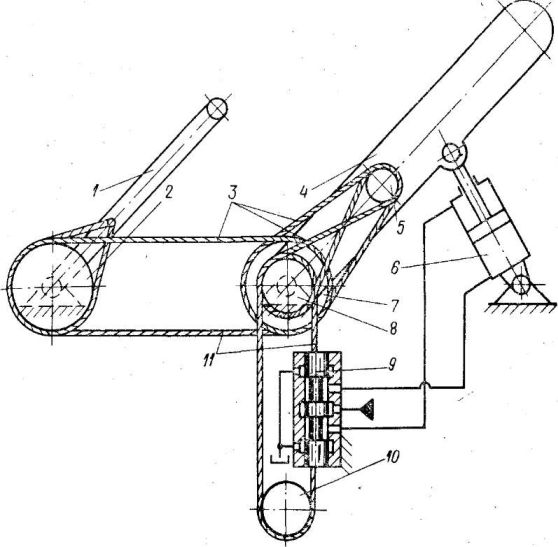
Рис. 2. Схема гидравлического следящего привода манипулятора с установкой золотника на звене, предшествующем приводному
Часто из конструктивных соображений удобнее устанавливать корпуса золотников на звеньях манипулятора, относительно которых отрабатывается поворот. При этом схема следящего привода и передачи к нему сигналов управления и обратной связи может быть выполнена так, как показано на рис. 2. Корпус следящего золотника устанавливается на том же звене, к которому шарнирно прикреплен гидроцилиндр, поворачивающий стрелу. Ветви троса, концы которых закреплены на управляющем устройстве, огибают задающий блок, блок, расположенный соосно с шарниром стрелы, блоки-сателлиты, общая сь которых установлена на стреле, блок, имеющий меньший диаметр по сравнению с блоком, и закрепляются на противоположных торцах следящего золотника. При этом ветвь троса предварительно пропускается через отклоняющий блок.
Поворот управляющего звена с задающим блоком в ту или иную сторону вызывает смещение золотника из нейтрального положения, что приводит к движению поршня гидроцилиндра. Поршень поворачивает стрелу в том же направлении, в котором поворачивается управляющее звено. При этом за счет движения блоков-сателлитов изменяются углы обхвата тросом блоков. При повороте стрелы длины участков тросов, лежащие на этих блоках, изменяются, компенсируя управляющий сигнал и обеспечивая, таким образом, отрицательную обратную связь.
Например, при повороте управляющего звена с задающим блоком против часовой стрелки, ветвь троса наматывается на задающий блок, а ветвь И сматывается с него. Это приводит к перемещению следящего золотника вниз по схеме и сообщению нижней полости гидроцилиндра с нагнетательной магистралью, а верхней полости — со сливной. Возникающий в гидроцилиндре перепад давлений заставляет поршень двигаться вверх, поворачивая стрелу в сторону движения управляющего звена. При этом длины участков ветви троса, лежащие на блоках, будут уменьшаться, а длина его прямолинейного участка между золотником и блоком — возрастать. Длины же участков ветви троса, лежащие на блоках, будут увеличиваться за счет уменьшения длины прямолинейного участка между золотником и блоком. Такое изменение длин прямолинейных участков ветвей троса, компенсирующее управляющий сигнал, заставляет золотник двигаться вверх, возвращая его в нейтральное положение. Когда сигнал обратной связи полностью скомпенсирует управляющий сигнал, золотник займет во втулке нейтральное положение и скорость движения поршня гидроцилиндра и стрелы станет равной нулю.
Иногда следящие золотники, управляющие всеми или несколькими звеньями манипулятора, удобно объединять в один узел, устанавливая его в каком-либо наиболее пригодном для этой цели месте.
Управляющий сигнал в виде угла поворота звена с задающим блоком через ветви троса передается тяге с блоками, которая расположена между отклоняющими блоками и жестко связана со следящим золотником. Смещение золотника из нейтрального положения вызывает движение поршня гидроцилиндра, поворачивающего стрелу в ту же сторону, в которую направлен управляющий сигнал. При повороте стрелы блок обратной связи через ветви троса передает на тягу и золотник сигнал, противоположный по направлению управляющему сигналу и компенсирующий его. Этот сигнал обратной связи возвращает золотник в нейтральное положение, при котором движение поршня и стрелы прекращается.
В случаях, когда несколько различных звеньев манипулятора чают управляющие сигналы от одного управляющего устройства схема проводки тросов по блокам должна быть такова, чтобы управляющий сигнал на каждый золотник поступал лишь от одного звена управляющего устройства, а сигнал обратной связи— лишь от одного звена манипулятора. Перемещения всех остальных звеньев манипулятора не должны изменять положение этого золотника. Это требование удовлетворяется при постоянстве суммарного угла обхвата каждым тросом всех направляющих блоков при одинаковом их диаметре. Для этого намотка тросов на направляющие блоки, установленные на осях подобных шарниров управляющего устройства и манипулятора, должна производиться в одном направлении. По этому правилу необходимо выполнять проводку тросов ко всем следящим золотникам.
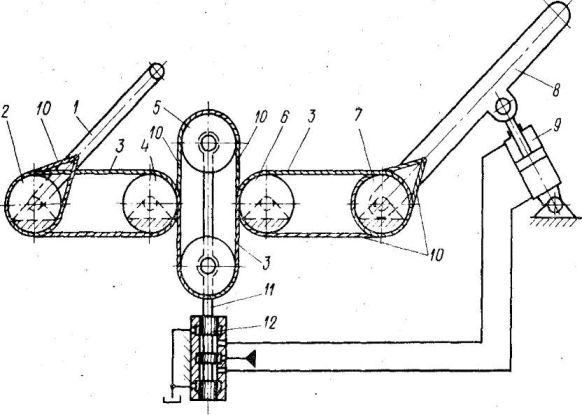
Рис. 3. Схема гидравлического следящего привода манипулятора с установкой золотника на основании
На рис. 4 показана схема управления приводом предплечья манипулятора, в которой предусмотрена компенсация ошибок слежения, связанных с поворотом плеча. Управление осуществляется с помощью управляющего устройства, структурная схема которого аналогична схеме манипулятора. При повороте предплечья рукоятки относительно плеча, например по часовой стрелке, ветвь троса 2 наматывается на задающий блок, а ветвь сматывается с него. Такие перемещения ветвей троса заставляют тягу и следящий золотник двигаться вниз по схеме.
При этом штоковая полость гидроцилиндра сообщается с нагнетательной магистралью, а бесштоковая — со сливной. Жидкость, поступающая в гидроцилиндр, заставляет поршень двигаться влево, поворачивая предплечье манипулятора относительно его плеча. Во время этого движения ветвь троса наматывается на блок обратной связи, а ветвь сматывается с него. За счет изменения длин участков ветвей троса, лежащих на блоке обратной связи, тяга перемещается вверх, возвращая золотник в нейтральное положение, соответствующее неподвижному поршню гидроцилиндра.
Рис. 4. Схема компенсации ошибок слежения, связанных с поворотом звеньев манипулятора
Поворот плеча управляющего устройства относительно стойки не оказывает влияния на положение золотника, если угол между плечом и предплечьем не изменяется. Это объясняется тем, что суммарный угол обхвата ветвями троса направляющих блоков, имеющих одинаковые диаметры, остается постоянным. Например, при повороте плеча управляющего устройства по часовой стрелке угол обхвата блока ветвью троса увеличится, но поскольку плечо манипулятора отрабатывает движение плеча управляющего устройства, угол обхвата блока этой же ветвью троса уменьшится на ту же величину, на которую он увеличился на блоке. Углы обхвата блоков ветвью троса изменяются противоположно.
В переходных процессах вследствие запаздывания в отработке управляющих сигналов и возникающей при этом разницы в углах поворота плечей рукоятки и манипулятора могут возникать управляющие сигналы на приводы последующих звеньев. Для уменьшения их величин необходимо диаметры направляющих блоков делать меньше, чем диаметры задающего блока и блока обратной связи.
Управляющие сигналы к звеньям манипулятора, которые могут возникнуть при относительном повороте шарнирно-соединенных звеньев, исключаются применением схемы проводки троса, показанной на рис. 5. Если к звену прикреплено какое-либо последующее звено манипулятора, то поворот звена относительно звена не должен вызывать поступательного движения ветвей троса. С этой целью соосно с шарниром устанавливаются блоки, причем диаметр блока вдвое превышает диаметр блока. Ветвь троса огибает блок, блок, ось которого жестко связана с звеном манипулятора, блок, проходит через блок, ось которого закреплена на звене, затем вторично огибает блок и направляется к последующему звену. При относительном повороте звеньев суммарная длина троса, лежащего на блоках, остается постоянной за счет двойного огибания блока при вдвое меньшем диаметре по сравнению с блоком. Это обеспечивает постоянство длин прямолинейных участков троса и, таким образом, отсутствие каких-либо сигналов, передаваемых через трос к последующему звену манипулятора или от него.
В некоторых случаях предплечье манипулятора снабжается выдвижной частью, расширяющей зону обслуживания. При этом возникает проблема передачи сигналов через возвратно-поступательно-движущиеся звенья к следящим золотникам приводов механизмов кисти. Величина этих сигналов не должна зависеть от положения выдвижной части.
Для передачи сигналов к следящим приводам звеньев, расположенных за выдвижной частью, через трос без искажения намотка этого троса на направляющие блоки, установленные на шарнирах «нюрнбергских ножниц», должна производиться по приведенному ранее правилу, т. е. в одном направлении. Этим обеспечивается постоянство длины участка троса в пределах «нюрнбергских ножниц» вне зависимости от вылета выдвижной части. Одна ветвь троса навита на направляющие блоки против часовой стрелки. Однако навивка может производиться и в противоположном направлении, а также при соосной установке нескольких направляющих блоков в схеме может быть несколько тросов, передающих сигналы к следящим приводам механизмов кисти. Если сигнал передается одновременно двумя ветвями троса, то на шарнирах устанавливаются дополнительные блоки, показанные пунктиром, на которые навивается вторая ветвь троса.
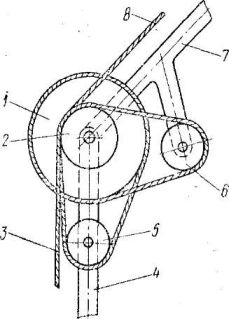
Рис. 5. Тросовая передача управляющих сигналов через шарнирно-соединенные звенья манипулятора причем соотношение перемещений выдвижной части манипулятора и управляющего устройства зависит от того, на каком шарнире закреплен этот блок.
Жесткая отрицательная обратная связь следящего привода выдвижной части выполнена с помощью блока обратной связи, устанавливаемого на одном из шарниров «нюрнбергских ножниц».
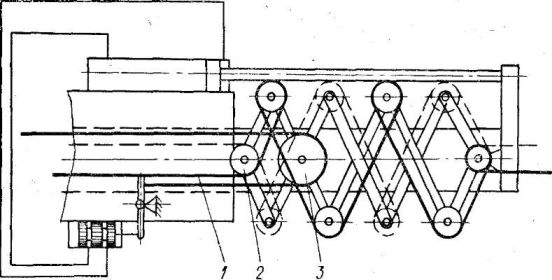
Рис. 6. Схема передачи сигналов через возвратно-поступательно-движущиеся звенья манипулятора с помощью механизма «нюрнбергских ножниц»
Недостатками механизма «нюрнбергских ножниц» является его сложность и относительно низкая жесткость, связанная с большим количеством шарнирных соединений. Поэтому его можно рекомендовать к применению лишь при небольших перемещениях выдвижной части. Упрощение конструкции и повышение жесткости механизма передачи сигналов через возвратно-поступательно-движущиеся звенья манипулятора может быть достигнуто выполнением его по одному из вариантов схем, показанных на рис. 7, где выдвижная часть приводится в движение относительно стрелы с помощью гидроцилиндра через полистпастный механизм. На конце штока гидроцилиндра, закрепленного на стреле, установлены блоки, огибаемые силовыми тросами. Один конец каждого из этих тросов закреплен на стреле, а другой — на выдвижной части, перемещение которой вдвое больше перемещения поршня.
Соосно с блоками расположен направляющий блок механизма передачи сигнала к приводу звена, расположенного за выдвижной частью манипулятора. Ось второго направляющего блока этого механизма закреплена на стреле. Трос последова-рльно огибает блоки и через блок направляется к звену, Неположенному за выдвижной частью. При ее перемещении суммарная длина ветвей троса, расположенных между блоками, изменяется на величину, вдвое превышающую перемещение поршня гидроцилиндра, т. е. на величину, равную перемещению выдвижной части. За счет этого участок троса, расположенный между блоками, перемещается вместе с выдвижной частью манипулятора и никаких сигналов в приводе последующего звена не возникает.
В варианте, показанном на рис. 7, б, выдвижная часть перемещается относительно стрелы непосредственно штоком гидроцилиндра. При этом в направляющей втулке передвигается штанга с блоками на конце. Ее перемещения производятся с помощью тросов, огибающих блоки. Один конец каждого из этих тросов закреплен: на стреле, а другой — на выдвижной части. Перемещения штанги вдвое меньше перемещения выдвижной части. Соосно с блоками расположен направляющий блок механизма передачи сигнала к приводу звена, расположенного за выдвижной частью манипулятора. Второй направляющий блок 9 установлен на оси, закрепленной в стреле. Трос механизма передачи сигнала последовательно огибает блоки и через блок направляется к звену, движением которого он управляет. При, перемещении выдвижной части суммарная длина ветвей троса, расположенных между блоками, изменяется на величину этого перемещения, так что на привод, Управляющий звеном, находящимся за выдвижной частью, ника-ких сигналов не поступает. Если за выдвижной частью располагается несколько звеньев манипулятора, передача сигналов к ним может выполняться через несколько тросов, огибающих блоки по описанным схемам.
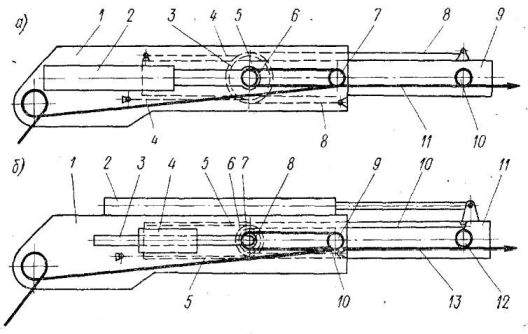
Рис. 7. Схема передачи сигналов через возвратно-поступательно-движущиеся звенья манипулятора с помощью полиспастного механизма
В некоторых случаях возникает задача передачи сигналов по тросу через звенья, совершающие друг относительно друга сложно-плоское движение. При этом относительное движение звеньев не должно приводить к возникновению сигналов в тросовой передаче. Такая задача может быть решена с помощью устройства, схема которого показана на рис. 8. Звенья соединены шарнирно, а звено может двигаться относительно звена поступательно. При одновременном движении звена относительно звена и звена относительно звена звено относительно звена совершает сложноплоское движение.
К звеньям шарнирно присоединены дополнительные звенья, связанные друг с другом шарнирно. На осях этих шарниров установлены дополнительные блоки равного диаметра, а на оси шарнирного соединения звеньев два блока. Трос последовательно огибает блок, отклоняющий блок, установленный на звене, второй блок и дополнительные блощ, причем намотка троса на блоки производится в одном направлении. Для компенсации в тросовой пере-даче относительно го движения звеньев сумма диаметров, блоков должна быть равна диаметру блока.
При повороте звена относительно звена, например по часовой стрелке, сумма углов обхвата тросом блоко не изменится, а поскольку сумма диаметров блоков равна диаметру блока, длина участков троса, лежащих на блоках, сохранится, поэтому в тросовой передаче не возникнет никаких сигналов.
При поступательном движении звена относительно звена сумма углов обхвата тросом дополнительных блоков не изменяется и, следовательно, в тросовой передаче также не возникают какие-либо сигналы. Очевидно, что и при одновременном движении звеньев в тросовой передаче будет происходить компенсация сложноплоского движения.
Управление копирующими погрузочными манипуляторами с тросовой передачей сигналов осуществляется с помощью механических управляющих устройств, снабженных рукояткой, передвигаемой оператором. Обычно для совмещенного управления движением нескольких звеньев манипулятора от одной рукоятки, маневренность кинематической цепи манипулятора, т. е. степень ее подвижности при жестко закрепленном схвате должна быть равна нулю. В тех случаях, когда маневренность равна по меньшей единице, прибегают к раздельному управлению приводами Мвеньев или предусматривают переключающее устройство, поочередно фиксирующее одну или несколько кинематических пар Р равляющего устройства. Это приводит к усложнению управления и конструкции манипулятора.
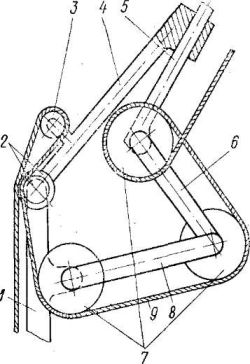
Рис. 8. Тросовая передача управляющих сигналов через звенья манипулятора, совершающие друг относительно друга сложноплоское движение
Совмещенное управление звеньями манипулятора от одной рукоятки даже при маневренности, равной или большей единицы, становится возможным с помощью управляющего устройства, в котором ограничивается наибольший угол между двумя любыми звеньями. Такое решение в погрузочных манипуляторах, имеющих, например, выдвижную часть в плече, позволяет ограничить величину максимального угла между предплечьем и горизонтальной плоскостью, что необходимо для предотвращения касания элементов предплечья с поднимаемым грузом или с грузом, уложенным в штабель.
Для достижения указанных целей управляющее устройство может быть выполнено по схеме, показанной на рис. III.9. Оно состоит из шарнирно-соединенных звеньев, причем звено в данном случае является неподвижным основанием. Датчики угловых положений звеньев и система передачи управляющих .сигналов на схеме не показаны, так как она позволяет использовать любые существующие устройства.
На осях шарниров звеньев управляющего устройства установлены направляющие блоки равного диаметра. Трос, один конец которого закреплен на звене У, последовательно огибает направляющие блоки в одном направлении, навиваясь на них по часовой стрелке, и крепится к пружине 8, установленной на звене. На тросе имеется ограничитель хода, который может упираться в упор звена.
В показанном на рис. 9 положении управляющего устройства ограничитель хода упирается в упор и поворот звена относительно звена против часовой стрелки возможен лишь в том случае, если звенья повернутся по часовой стрелке относительно звена. При этом максимальный угол между звеньями оказывается всегда одинаковым при одинаковых диаметрах направляющих блоков, так как увеличение угла обхвата тросом какого-либо блока возможно только при уменьшении угла обхвата стальных блоков на ту же величину.
Копирующие управляющие устройства часто выполняют по схемам, геометрически подобным манипуляторам. Однако при этом в случаях, когда стрелы снабжены выдвижными частями, одновременное вращение и выдвижение звеньев управляющего устройства практически невозможно, поскольку вектор приложенной к рукоятке управления силы составляет с направлением выдвижной части угол близкий к 90°. Устранение этого недостатка и упрощение конструкции управляющего устройства достигается выполнением его по схеме, показанной на рис. III.10. Оно состоит из шарнирно-соединенных звеньев, причем звено в этом примере является неподвижным основанием. На оси шарнира звеньев установлены задающий блок и направляющий блок. На звеньях, выполненных равной длины, на равных расстояниях от оси их шарнирного соединения установлены направляющие блоки. Дополнительный блок, имеющий диаметр вдвое меньше, чем у задающего блока, установлен на оси шарнира звеньев. Стрела манипулятора шарнирно присоединена к неподвижному основанию и имеет выдвижную часть. Следящий золотник, корпус которого установлен на основании, управляет движениями поршня гидроцилиндра, поворачивающего стрелу. Трос передачи управляющего сигнала на этот золотник крепится к звену управляющего устройства, последовательно огибает блоки и закрепляется к подпружиненному плунжеру следящего золотника. Этот трос имеет ограничитель хода, упирающийся в крайнем положении в упор.
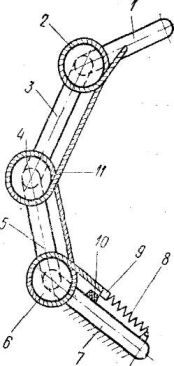
Рис. 9. Схема управляющего устройства манипулятора с ограничением максимального угла между двумя любыми звеньями
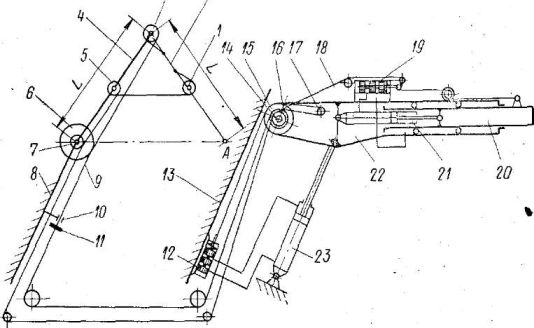
Рис. 10. Схема управляющего устройства стрелы манипулятора с выдвижной частью
Следящий золотник, корпус которого закреплен на стреле, служит для управления гидроцилиндром выдвижной части. Управляющий сигнал к подпружиненному плунжеру этого золотника передается тросом, один конец которого закреплен на звене управляющего устройства. Этот трос проходит через блоки, блок плунжера золотника и крепится к выдвижной части.
рассмотрим работу манипулятора при некоторых конкретных движениях рукоятки А. Если ограничитель хода упирается в упор, как показано на рис. 10, то звенья управляющего устройства при неизменном угле между ними могут поворачиваться только по часовой стрелке. При таком повороте угол обхвата тросом блока уменьшается, ограничитель хода отходит от упора и золотник под действием пружины смещается вниз из нейтрального положения, что вызывает следящий поворот стрелы. Описание работы следящего привода при этом повороте приведено ранее. Выдвижная часть стрелы при этом за счет уменьшения угла обхвата тросом блока будет двигаться в сторону увеличения вылета. Для того чтобы вылет не изменялся, необходимо в процессе поворота стрелы приближать рукоятку А к оси блока. Если при упоре ограничителя хода И в упор рукоятка А перемещается по прямой за счет изменения угла между звеньям, то через трос на золотник передается управляющий сигнал, вызывающий следящее перемещение выдвижной части. При этом сигнал в системе управления поворотом стрелы отсутствует, так как изменение длины участка троса, лежащего на блоке, будет компенсироваться противоположным изменением длины участка троса, лежащего на блоке, в связи с соотношением их диаметров.
Поворот звена относительно неподвижных звеньев по часовой стрелке приводит к подаче управляющего сигнала через трос на следящий золотник и перемещению выдвижной части в сторону уменьшения вылета. При этом угол обхвата тросом блока будет уменьшаться, освобождающаяся длина троса позволит золотнику смещаться из нейтрального положения вниз, в связи с чем стрела будет двигаться по часовой стрелке. В общем случае движения рукоятки А приводят к одновременной работе следящих приводов поворота стрелы и выдвижной части.
Рекламные предложения:
Главная → Справочник → Статьи → Форум
Механизация земляных работ
Механизация строительства
Механизация дорожных работ
Автоматизация строительства
→ Бетонные работы
→ Мини-тракторы
 Разделы
Разделы
Строительные машины и оборудование
→ Для специальных земляных работ
→ Дорожно-строительные машины
→ Строительное оборудование
→ Асфальтоукладчики и катки
→ Большегрузные машины
→ Строительные машины, часть 2,
→ Дорожные машины, часть 2
→ Ремонтные машины
→ Ковшовые машины
→ Автогрейдеры
→ Экскаваторы
→ Бульдозеры
→ Скреперы
→ Грейдеры
Эксплуатация строительных машин
→ Эксплуатация средств механизации
→ Эксплуатация погрузочных машин
→ Эксплуатация паровых машин
→ Эксплуатация экскаваторов
→ Эксплуатация подъемников
→ Эксплуатация кранов перегружателей
→ Эксплуатация кузовов машин
→ Крановщикам и стропальщикам
Ремонт строительных машин
Ремонт дорожных машин
Ремонт лесозаготовительных машин
Ремонт автомобилей КАмаЗ
Техническое обслуживание автомобилей
Очистка автомобилей при ремонте
Материалы и шины
Остались вопросы по теме:
"Устройства тросовой передачи управляющих сигналов к приводам звеньев манипуляторов"
— воспользуйтесь поиском.
→ Машины городского хозяйства
→ Естественная история машин
→ Транспортная психология
→ Пожарные автомобили
→ Автомобили-рефрижераторы
→ Монтаж и эксплуатация лифтов
→ Тракторы