Строй-Техника.ру
Строительные машины и оборудование, справочник
Первоочередной задачей конструктора является: задача выбора кинематической схемы и размеров звеньев, обеспечивающих работоспособность манипулятора в заданном обслуживаемом объеме при заданных ограничениях на размеры рабочей зоны, которые зависят, например, от высоты складского; помещения, ширины рабочего проезда и т.д.
Условия работы манипулятора характеризуются; ограничениями, наложенными на рабочий объем или рабочую зону. Манипулятор, не имеющий ограничений на рабочий объем, работает в свободном рабочем объеме, и, соответственно, манипулятор, условия эксплуатации которого накладывают ограничения на рабочий объем, работает в ограниченном рабочем объеме. При работе, например, в складских помещениях, рабочий объем манипулятора может быть ограничен высотой склада и шириной проезда. При геометрическом синтезе манипулятора необходимо: обеспечить следующие условия.
1. Манипулятор должен обслуживать все точки § обслуживаемой зоны с заданным углом сервиса.
2. Реальная рабочая зона манипулятора должна быть меньше или равна заданной рабочей зоне.
3. При работе в обслуживаемом объеме необходимо обеспечить отсутствие контакта элементов конструкции манипулятора с грузом.
4. Необходима минимальная длина звеньев, так как это улучшает точностные характеристики манипулятора.
5. Геометрические свойства антропоморфных кинематических схем погрузочных манипуляторов
Рекламные предложения на основе ваших интересов:
Дополнительные материалы по теме:
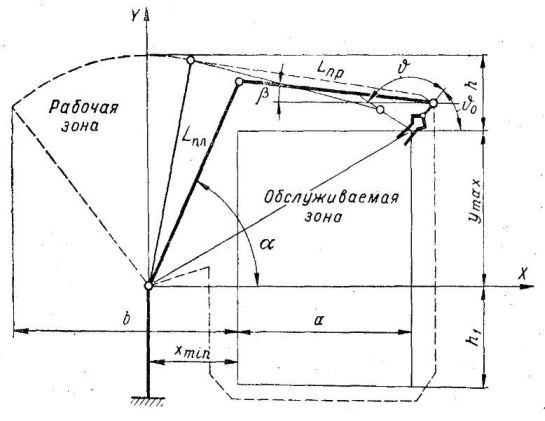
Рис. 1. Обслуживаемая и рабочая зоны погрузочного манипулятора
В каждой точке обслуживаемой зоны манипулятор должен обеспечить потребный угол сервиса в базовой плоскости, необходимый для кантовки груза. Необходимо ввести различие между возможным углом сервиса и потребным. Для погрузочного манипулятора необходимо обеспечить потребный угол сервиса с зафиксированной границей в каждой точке обслуживаемой зоны. В работе угол сервиса есть максимальный угол между положением кисти и осью X. Под потребным углом сервиса будем понимать угол между крайними необходимыми положениями кисти, а угол будет характеризовать положение заданного угла сервиса в обслуживаемой точке по отношению к оси X. Практически во всех точках обслуживаемой зоны будет существовать разница между возможным углом сервиса и потребным.
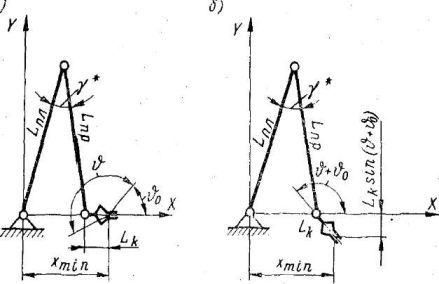
Рис. 2. Углы сервиса погрузочного манипулятора при работе в точках, лежащих на границе обслуживаемой ЗОНЫ X = ЛГШ)П
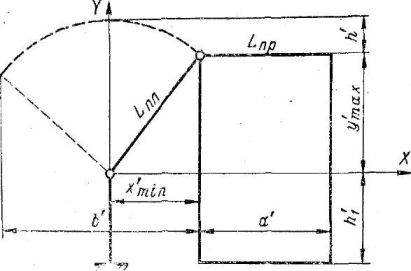
Рис. 3. Условные обслуживаемая и рабочая зоны погрузочных манипуляторов
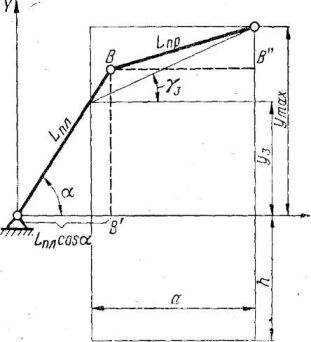
Рис. 4. Положение звеньев манипулятора при ступенчатой укладке К груза в штабель
9. Геометрический синтез манипуляторов, работающих в ограниченных рабочих объемах
По условиям эксплуатации погрузочных манипуляторов на размеры рабочего объема могут быть наложены ограничения как по высоте, так и по ширине. Эти ограничения вызваны, например, высотой складского помещения или шириной рабочего проезда. В связи с этим рассмотрим влияние размеров звеньев манипулятора на ширину неиспользуемой части рабочей зоны и высоту рабочей зоны манипулятора, расположенную над обслуживаемой зоной. Сложную форму рабочей зоны аппроксимируем прямоугольником, образованным двумя горизонталями, проходящими через две наиболее отдаленные по вертикали точки реальной рабочей зоны и двумя вертикальными прямыми, проходящими через две точки, наиболее отдаленные друг от друга по горизонтали.
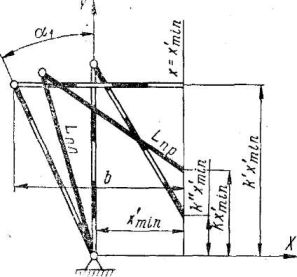
Рис. 5. Определение ширины неиспользуемой рабочей зоны
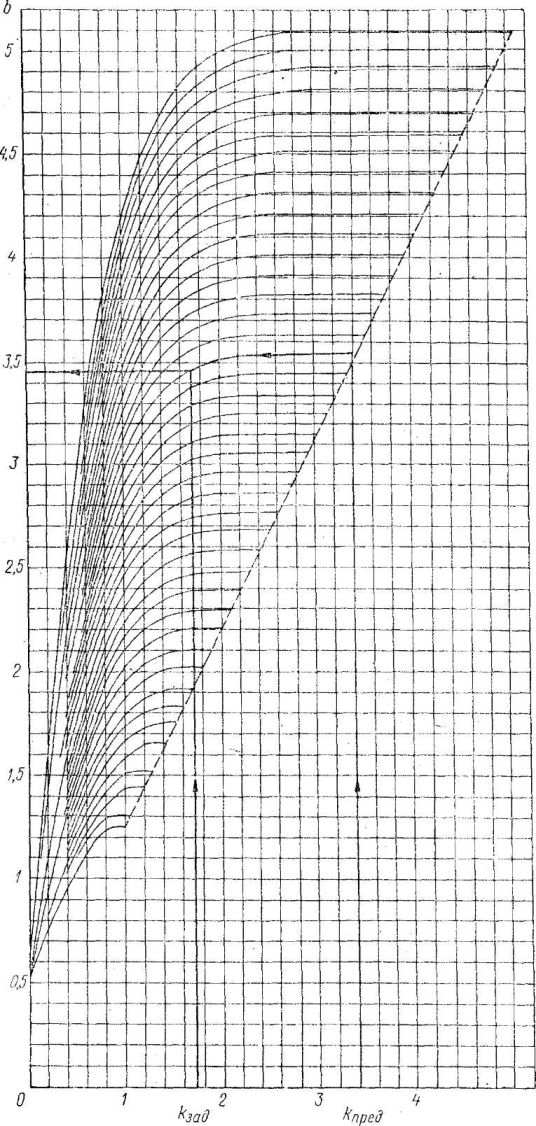
Рис. 6. Номограмма для определения ширины неиспользуемой рабочей зоны
11. Манипуляторы с выдвижными секциями и условие непопадания их звеньев в штабель
Для манипуляторов с выдвижной секцией на предплечье, когда отсутствует избирательность в работе звеньев, а выдвижная секция работает при максимальном угле у** между плечом и предплечьем, условие непопадания плеча в часть обслуживаемой зоны, лежащую ниже прямой, проходящей через ось кистевого шарнира под углом -уз к оси X, может не выполняться. При направлении движения точки С , совпадающем с осью выдвижной
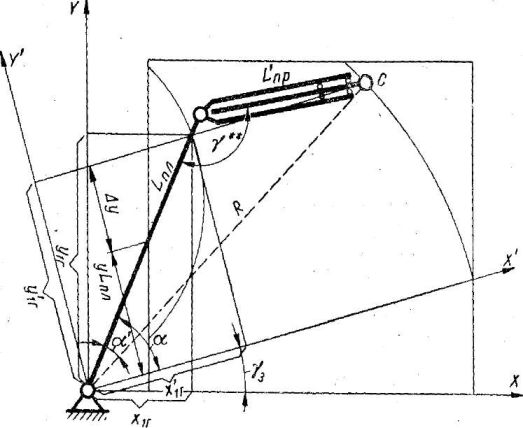
Рис. 7. Манипулятор с выдвижной секущей на предплечье при работе с углом у = y**
15. Определение размеров задающих устройств погрузочных манипуляторов
В том случае, когда система управления манипулятором построена таким образом, что положение кисти оператора определяет положение и ориентацию груза, задача согласования размеров задающего устройства с кинематическими особенностями и антропометрическими данными руки оператора является достаточно сложной, так как в настоящее время нет данных по распределению углов сервиса кисти человека в рабочей зоне руки оператора. В случае погрузочных манипуляторов, когда применено раздельное управление переносом оси кистевого шарнира и ориентацией кисти манипулятора, задача определения размеров задающего устройства копирующего манипулятора может быть решена, так как положение кисти руки оператора, управляющей переносом груза, в этом случае может быть произвольным. Кроме того, в погрузочных манипуляторах решается плоская задача, так как управление поворотом производится от другого управляющего устройства, в частности, с помощью ног, и кисть руки оператора перемещает задающее устройство в плоскости
Параллельной базовой плоскости исполнительного механизма. Рабочая зона руки оператора (при неподвижном туловище) лежит справаот оси OY и ограничена окружностями с радиусами Rt и R 2 и с центром, совпадающим с лопаточно-плечевым суставом (рис. IV.25). Так как оператор может увеличивать площадь рабочей зоны за счет подвижности тела, то для расчета берутся значения этих размеров для лиц среднего роста (Ri = 180 и R2 = = 650 мм). Наибольшие трудности оператор испытывает при работе на границах обслуживаемой зоны. Однако в погрузочных манипуляторах работа на границах обслуживаемой зоны протекает редко и к тому же время рабочего цикла непродолжительно, поэтому использование граничных точек рабочей зоны может быть допущено. Кроме того, использование предельной рабочей зоны позволяет уменьшить масштаб копирования, что, в свою очередь, увеличивает точность управления и, следовательно, облегчает условие работы оператора.
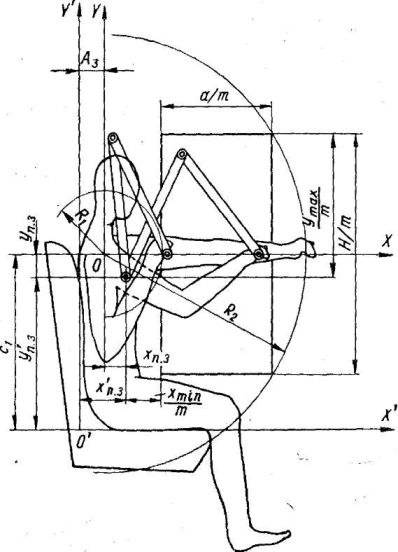
Рис. 8. Рабочая зона руки оператора
Примем, что условная обслуживаемая зона уменьшена в т раз, где т — масштаб копирования, равный отношению длин звеньев исполнительного механизма к длинам соответствующих звеньев задающего устройства. Тогда уменьшенную или приведенную обслуживаемую зону можно вписать в рабочую зону руки оператора.
16. Метрический синтез исполнительных механизмов, выполненных в виде гидроцилиндров
Простота конструкции, а также возможность применения стандартных. гидроцилиндров, обусловливает их применение для привода звеньев погрузочных манипуляторов. Возможны два варианта шарнирного присоединения гидроцилиндров.
Рекламные предложения:
Главная → Справочник → Статьи → Форум
Механизация земляных работ
Механизация строительства
Механизация дорожных работ
Автоматизация строительства
→ Бетонные работы
→ Мини-тракторы
 Разделы
Разделы
Строительные машины и оборудование
→ Для специальных земляных работ
→ Дорожно-строительные машины
→ Строительное оборудование
→ Асфальтоукладчики и катки
→ Большегрузные машины
→ Строительные машины, часть 2,
→ Дорожные машины, часть 2
→ Ремонтные машины
→ Ковшовые машины
→ Автогрейдеры
→ Экскаваторы
→ Бульдозеры
→ Скреперы
→ Грейдеры
Эксплуатация строительных машин
→ Эксплуатация средств механизации
→ Эксплуатация погрузочных машин
→ Эксплуатация паровых машин
→ Эксплуатация экскаваторов
→ Эксплуатация подъемников
→ Эксплуатация кранов перегружателей
→ Эксплуатация кузовов машин
→ Крановщикам и стропальщикам
Ремонт строительных машин
Ремонт дорожных машин
Ремонт лесозаготовительных машин
Ремонт автомобилей КАмаЗ
Техническое обслуживание автомобилей
Очистка автомобилей при ремонте
Материалы и шины
Остались вопросы по теме:
"Геометрический синтез погрузочных манипуляторов"
— воспользуйтесь поиском.
→ Машины городского хозяйства
→ Естественная история машин
→ Транспортная психология
→ Пожарные автомобили
→ Автомобили-рефрижераторы
→ Монтаж и эксплуатация лифтов
→ Тракторы