Строй-Техника.ру
Строительные машины и оборудование, справочник
Замена ручного труда машинами требует решения задачи комплексной механизации и автоматизации производства. Очевидно, что выбор средств механизации и автоматизации технологических процессов зависит от объема производства и его серийности. Распространение механизации и автоматизации на серийное и мелкосерийное производство, характеризующееся переналадками и изменяющимися режимами, делает понятие поточного производства более сложным. Многообразие и сложность видов движения в процессе производства приходит на смену прежнему упрощенному представлению о потоке как о непрерывном движении с постоянными темпом и направлением. Эти изменения накладывают отпечаток и на погрузочно-разгрузочные работы, где, в связи с ростом производительности труда и постоянно расширяющимся объемом производства значительно возрастают объемы работ, связанные с большой номенклатурой грузов, отличающейся как по типу, так и по виду, Для создания современного гибкого технологического процесса требуется создание универсальных транспортных и перегрузочных устройств, способных обеспечить высокую степень механизации и автоматизации даже при разнородной серийной продукции. Этим требованиям в наибольшей степени отвечают промышленные манипуляторы, управляемые человеком, и промышленные роботы — манипуляторы с автоматическим управлением, обладающие в достаточной степени универсальностью и автономностью и способные выполнять разнообразные рабочие операции. Действительно, даже при работе с однотипными грузами рабочая операция меняется от цикла к циклу, что вызвано изменением координат начальной и конечной точек траектории, т. е. рабочая операция не вполне ясна заранее, а варьируется в широких пределах, поэтому изготовление специализированных механизмов оказывается экономически неоправданным.
Применение промышленных манипуляторов или манипуляторов общего назначения в этом случае представляется наиболее рациональным. Манипуляторами общего назначения принято называть дистанционно-управляемые механизмы, призванные выполнять требования оператора и производить вслед за ним манипуляции, функционально эквивалентные по своему характеру руке человека, т. е. механизмы, обладающие способностью захватывать различные предметы и имеющие достаточное число степеней свободы, чтобы перемещать предметы в любую точку обслуживаемого пространства и придавать им почти любое положение.
Очевидно, что наиболее совершенным манипулятором мог бы стать дистанционно-управляемый механизм, представляющий собой функциональный эквивалент руки человека. Однако, техническая реализация такого устройства для решения широкого круга задач манипулирования нецелесообразна и на современном уровне развития техники не представляется возможной. Это объясняется тем, что несмотря на существенные успехи, достигнутые в области кибернетики и бионики, инженерно-технический персонал, разрабатывающий манипуляторы, не располагает необходимым арсеналом средств для создания технического устройства, обеспечивающего воспроизведение того разнообразия движений, которое может реализовать рука человека. Поэтому к решению этой проблемы подходят с позиций установления наиболее типичных, многократно повторяющихся операций и определения оптимального числа степеней подвижности, достаточных для выполнения поставленных задач.
Рекламные предложения на основе ваших интересов:
Дополнительные материалы по теме:
При выполнении погрузочно-разгрузочных работ, как правило, мы сталкиваемся с двумя типами операций. К операциям первого типа следует отнести наиболее простые операции, вызванные необходимостью захвата грузов, их переноса в пространстве и обеспечения заданной ориентации. Второй тип операций характеризуется требованием установки грузов в строгом порядке и в соответствии с другими грузами. Наличие таких операций вызвало необходимость оснащения погрузчиков и штабелеров, традиционных средств механизации погрузочных работ, разнообразными конструкциями кантователей, поворотных рам, стал-кивателей и т. д. Однако, функции переноса предметов остались за носителями, что в виду их низкой маневренности не обеспечивает высокой производительности и требует больших объемов для выполнения разнообразных маневров. В то же самое время в разных отраслях промышленности стали находить применение манипуляторы разнообразных конструкций, как правило, с раздельным управлением каждым приводом. Опыт же применения манипуляторов с сервоприводами в атомной промышленности, где для управления используется код движений руки оператора, подсказал целесообразность использования аналогичных систем управления и для промышленных манипуляторов.
Рассмотрим конструкции наиболее распространённых манипуляторов. На рис. 1 представлен манипулятор с гидравлическим приводом, установленный на электрокаре ЭК-2 и предназначенный для механизации погрузочно-разгрузочных работ. Он позволяет осуществлять погрузку и выгрузку штучных, мелких и сыпучих грузов, помещенных в специальную тару. Возможно его применение для погрузки грузов на прицепные тележки, а на складах—для укладки груза в штабель или установку
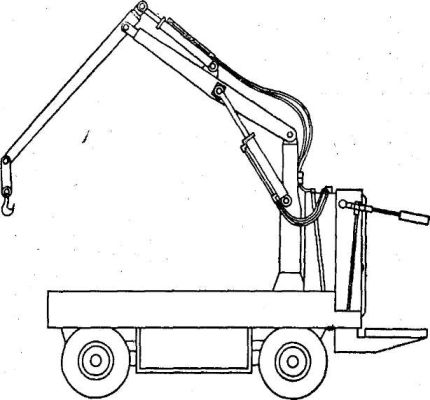
Рис. 1. Манипулятор гидравлический на электрокаре ЭК-2
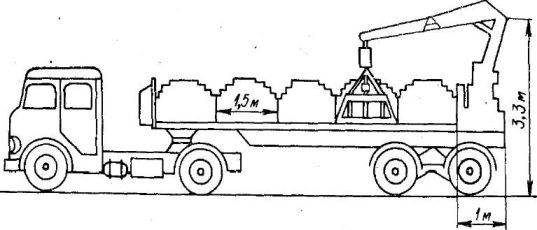
Рис. 2. Автомобиль для перевозок кирпича, оснащенный манипулятором фирмы НИАВ
на стеллажи. Манипулятор отличается простотой конструкции, £Де использованы унифицированные гидравлические узлы; его грузоподъемность 200 кгс при скорости 0,16 м/мин, управление ручное раздельное.
На рис. 2, 3 изображены манипуляторы, выпускаемые фирмами НИАВ и «Валмет». Они также состоят из двух шарнирно-сочлененных стрел—плеча и предплечья, установленных на поворотной колонне. В некоторых модификациях предплечья выполнены переменной длины, т. е. они снабжены выдвижной секцией; привод гидравлический; давление питания 120— 150 кгс/см2. Технические характеристики некоторых модификаций этих манипуляторов даны в табл. 1. Указанные манипуляторы разработаны и применяются для механизации погрузочно-разгрузочных работ на транспорте. Однако наибольшее и успешное применение онилполучили в лесной промышленности. Производительность манипулятора «Элефант 177» при погрузке леса 90— 100 м3/ч. Большое количество сменных захватов обеспечивает их широкое применение и для других разнообразных погрузочных и монтажных работ.
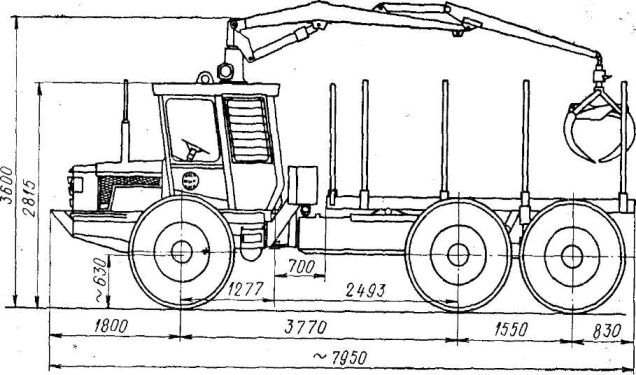
Рис. 1.3. Манипулятор погрузочный фирмы «Валмет»
Для внутризаводских транспортировок огнеупоров предлагается применять специализированные автомобили грузоподъемностью 10—12 т с открытой платформой для обеспечения и ускорения погрузки и разгрузки пакетов кирпича. Такой автомобиль, как правило, оснащен гидравлическим манипулятором, который оборудован боковым гидравлическим захватом для пакетов кирпича и может перемещаться на каретке вдоль платформы автомобиля по направляющим. Время погрузки или разгрузки автомобиля грузоподъемностью 12 т составляет около 5—6 мин.
Манипулятор на рис. 4 отличается от рассмотренных выше тем, что у него плечо выполнено переменной длины. К существенным недостаткам рассмотренных выше манипуляторов следует отнести то, что управление всеми этими манипуляторами выполнено раздельным, оператор управляет приводами отдельных звеньев последовательно и лишь в редких случаях — двумя приводами одновременно.
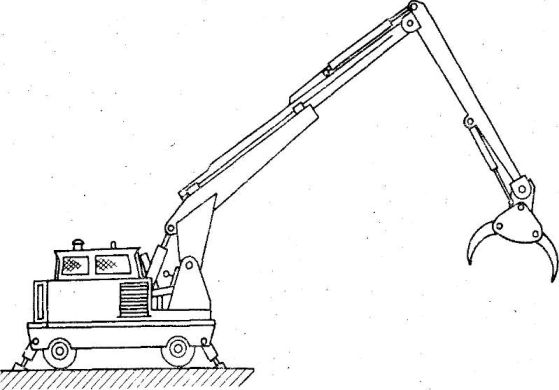
Рис. 4. Погрузочный манипулятор Локомотив
Число рукояток управления в некоторых конструкциях достигает десяти, что требует от оператора высокой профессиональной подготовки и становится тормозом при интенсивном и непрерывном технологическом процессе. Практически все рассмотренные конструкции применяются или для механизации погрузочных работ на открытом транспорте, или для работы в лесном хозяйстве, где нет жестких ограничений на положение звеньев манипулятора. Сложность управления такими манипуляторами значительно увеличивается, если он работает в закрытых объемах или помещениях, для обеспечения безопасности работ рабочие скорости звеньев манипулятора ограничены. Увеличения скорости перемещения грузов, а следовательно, и производительности можно добиться путем применения копирующих систем управления, когда программирование движений звеньев манипулятора осуществляется с использованием кода движений руки человека. На рис. 5 представлен промышленный манипулятор, предназначенный для механизации широкого круга работ с тяжелыми грузами. Его конструкция представляет шарнирный многозвенник с рабочим органом в виде захвата; привод звеньев гидравлический, причем качание рабочего opratia в вертикальной плоскости осуществляется тросовой передачей, приводимой в действие гидроцилиндром. Для упрощения управления исполнитель таким манипулятором может неквалифицированный рабочий с минимальной подготовкой. Данный манипулятор может имитировать множество движений руки и кисти оператора. Применение обратной связи по нагрузке позволяет оператору в определенном масштабе ощутить нагрузку и достаточно ловко выполнять операции по переносу и установке груза.
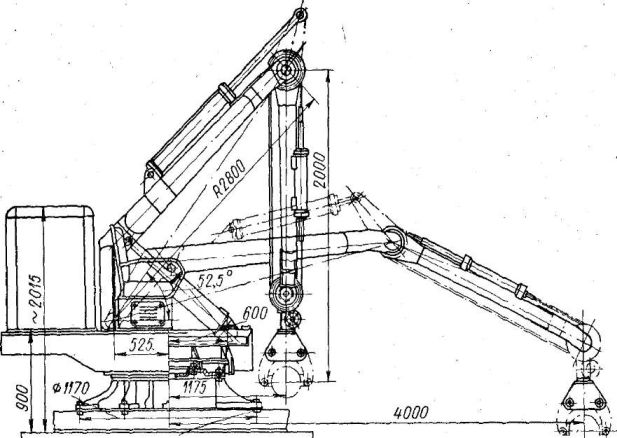
Рис. 5. Манипулятор для работы с тяжелыми грузами
Конструктивной особенностью манипулятора является наличие механизма двойного параллелограмма для передачи движения с исполнительного механизма, расположенного на основании, на качание кисти или захвата. С одной стороны, это существенно упрощает конструкцию, но с другой, — уменьшает функциональные возможности, так как угол кантовки груза ограничивается в этом случае параметрами механизма двойного параллелограмма.
Рис. 6. Манипулятор фирмы «Дженерал электрик»
Дальнейшим развитием манипуляторов являются так называемые промышленные роботы или манипуляторы с программным управлением. В настоящее бремя в промышленном производстве таких капиталистических стран, как США, Англия, Япония, широкое применение получили промышленные роботы типа «Версатран», «Юнимейт», «Аутовот» и др. На рис. 7 представлен робот «Версатран-500». Стандартное оборудование этого робота включает в себя одну трубчатую горизонтальную «руку», проходящую сквозь вертикальную колонну, укрепленную на основании. «Рука» все время остается в горизонтальном положении, но может двигаться в горизонтальной и вертикальной плоскостях и поворачиваться вокруг вертикальной оси. Таким образом, возможно движение в цилиндрических координатах: «рука» может дотянуться до любой точки внутри цилиндрического объема высотой и радиусом в 1 м и в пределах горизонтального угла 240°. «Рука» заканчивается кистью, совершающей качательное движение, к которой, в свою очередь, крепится приспособление для схватывания деталей. Перемещение звеньев обеспечивается гидравлическим приводом, который обычно изготовляется отдельным модулем или может быть объединен и с механической частью. С одной и той же механической частью могут использоваться системы управления как позиционного, так и контурного типа.
Конструкция робота допускает монтаж механической части в перевернутом положении, монтаж в горизонтальном или в каком-либо другом, отличном от стандартной модели, положении. Возможно перемещение механической части по рельсовой системе. Управление этим перемещением может быгь или двухпозиционным, или следящим, соответственно требованиям применения.
Рассмотренные конструкции манипуляторов отличаются друг от друга способами управления, различными вариантами исполнительных механизмов, а также и кинематическими схемами, положенными в их основу. При этом можно отметить, что все схемы с операторным управлением антропоморфны и их отличие заключается только в том, что в некоторых из них или плечо, или предплечье выполнено переменной длины, т. е. снабжены выдвижными секциями. При построении промышленных роботов антропоморфизм кинематической схемы уже не является обязательным элементом и, как правило, организация движения в пространстве в них достигается наиболее простыми средствами — использованием так называемых координатных манипуляторов, в которых описание движения оси кистевого шарнира совпадает с записью координат точки в той или иной системе координат, например в цилиндрической (робот «Версатран») или сферической («Юнимейт»), что объясняется простотой программирования движения. Выбор той или иной кинематической схемы является первой задачей, встающей перед проектировщиками. Решение такой задачи требует выработки критериев оценки кинематических схем по геометрическим свойствам, кинематическим и динамическим характеристикам, энергетическим и точностным параметрам.
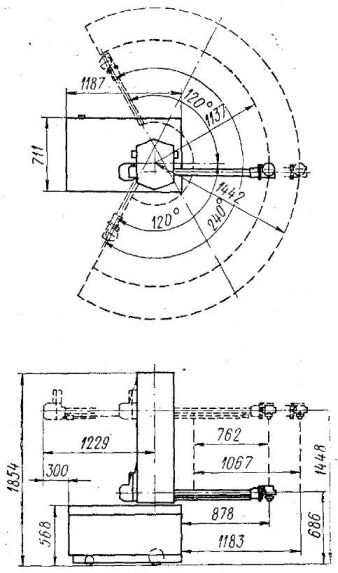
Рис. 7. Промышленный робот «Верса-тран-500»
Рекламные предложения:
Главная → Справочник → Статьи → Форум
Механизация земляных работ
Механизация строительства
Механизация дорожных работ
Автоматизация строительства
→ Бетонные работы
→ Мини-тракторы
 Разделы
Разделы
Строительные машины и оборудование
→ Для специальных земляных работ
→ Дорожно-строительные машины
→ Строительное оборудование
→ Асфальтоукладчики и катки
→ Большегрузные машины
→ Строительные машины, часть 2,
→ Дорожные машины, часть 2
→ Ремонтные машины
→ Ковшовые машины
→ Автогрейдеры
→ Экскаваторы
→ Бульдозеры
→ Скреперы
→ Грейдеры
Эксплуатация строительных машин
→ Эксплуатация средств механизации
→ Эксплуатация погрузочных машин
→ Эксплуатация паровых машин
→ Эксплуатация экскаваторов
→ Эксплуатация подъемников
→ Эксплуатация кранов перегружателей
→ Эксплуатация кузовов машин
→ Крановщикам и стропальщикам
Ремонт строительных машин
Ремонт дорожных машин
Ремонт лесозаготовительных машин
Ремонт автомобилей КАмаЗ
Техническое обслуживание автомобилей
Очистка автомобилей при ремонте
Материалы и шины
Остались вопросы по теме:
"Конструкции и технологические возможности манипулятора"
— воспользуйтесь поиском.
→ Машины городского хозяйства
→ Естественная история машин
→ Транспортная психология
→ Пожарные автомобили
→ Автомобили-рефрижераторы
→ Монтаж и эксплуатация лифтов
→ Тракторы