Строй-Техника.ру
Строительные машины и оборудование, справочник
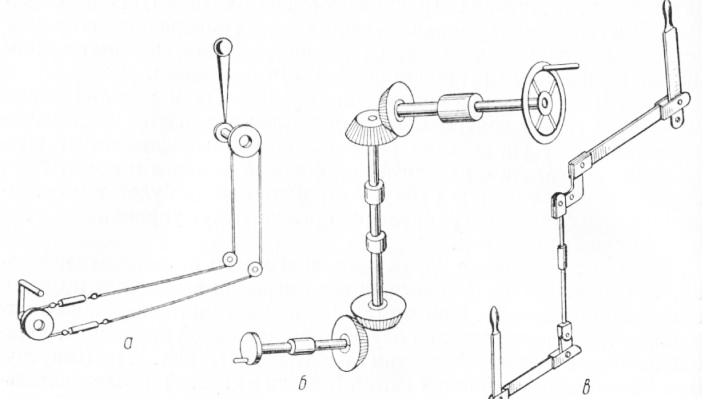
Наиболее распространенные механические системы дистанционного управления по конструктивным признакам могут быть разделены на три типа: валиковые, рычажные и тросиковые.
В рычажных ДУ рукоятка поста управления через систему рычагов и шарниров связана с дизелем. Перемещение рукоятки вызывает изменение положения рычагов и тяг, которые, воздействуя на исполнительный механизм, устанавливают заданный режим работы. При валиковом ДУ эти операции осуществляются через маховик поста управления. Поворот маховика на передний или задний ход передается дизелю через систему валиков, соединенных между собой коническими шестернями. Вали-ковые и рычажные конструкции надежны в работе, сохраняют синхронность перемещения концевых органов управления. Ва-ликовые и рычажные передачи чувствительны к состоянию шарниров, втулок, серег, шестерен и к прямолинейности осей,валов. Отклонения от первоначальной регулировки могут возникнуть только в результате износов в шарнирных соединениях.
Рекламные предложения на основе ваших интересов:
Дополнительные материалы по теме:
В тросиковых ДУ рукоятка и шкив поста управления жестко насажены на общий вал. Поворот рукоятки на передний или задний ход сообщается исполнительному механизму дизеля через тросиковую передачу. В местах изменения направления движения тросиков устанавливаются ролики. В тросиковых системах управления при длительной работе и особенно при большом расстоянии между двигателем и постом управления возникают остаточные деформации, которые приводят к нарушению синхронности перемещения концевых органов управления. Поэтому если передачи тросиковые, то необходимо ежедневно проверять согласованность положений задающего и исполнительного механизмов, постоянно наблюдать за состоянием тросиков и их натяжением талрепами. Тросиковые передачи применяются при расстояниях не более 25 м, когда управление главным двигателем сведено к одной рукоятке с усилием не более 8— 10 кГ. Применение механических систем ограничивается допустимым усилием, которое необходимо приложить к рукоятке на посту управления.
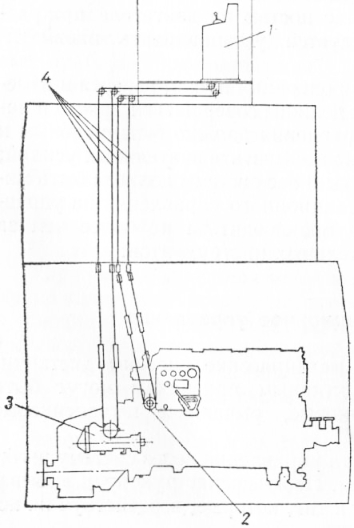
На рис. 2 показана принципиальная схема механической системы дистанционного управления двигателем. Дистанционные посты управления реверс-редуктором и топливным насосом вынесены в штурманскую рубку. От них через систему валиков и тросиков осуществляется связь с механизмами изменения подачи топлива и переключения реверс-редуктора 3. В том случае, когда усилия, прилагаемые к рукоятке, превышают допустимые, необходимо их уменьшить путем применения силовых механизмов.
Рекламные предложения:
Главная → Справочник → Статьи → Форум
Механизация земляных работ
Механизация строительства
Механизация дорожных работ
Автоматизация строительства
→ Бетонные работы
→ Мини-тракторы
 Разделы
Разделы
Строительные машины и оборудование
→ Для специальных земляных работ
→ Дорожно-строительные машины
→ Строительное оборудование
→ Асфальтоукладчики и катки
→ Большегрузные машины
→ Строительные машины, часть 2,
→ Дорожные машины, часть 2
→ Ремонтные машины
→ Ковшовые машины
→ Автогрейдеры
→ Экскаваторы
→ Бульдозеры
→ Скреперы
→ Грейдеры
Эксплуатация строительных машин
→ Эксплуатация средств механизации
→ Эксплуатация погрузочных машин
→ Эксплуатация паровых машин
→ Эксплуатация экскаваторов
→ Эксплуатация подъемников
→ Эксплуатация кранов перегружателей
→ Эксплуатация кузовов машин
→ Крановщикам и стропальщикам
Ремонт строительных машин
Ремонт дорожных машин
Ремонт лесозаготовительных машин
Ремонт автомобилей КАмаЗ
Техническое обслуживание автомобилей
Очистка автомобилей при ремонте
Материалы и шины
Остались вопросы по теме:
"Механическое дистанционное управление"
— воспользуйтесь поиском.
→ Машины городского хозяйства
→ Естественная история машин
→ Транспортная психология
→ Пожарные автомобили
→ Автомобили-рефрижераторы
→ Монтаж и эксплуатация лифтов
→ Тракторы