Строй-Техника.ру
Строительные машины и оборудование, справочник
Электрическая схема крана ККТ-5. Простейшая электрическая схема крана ККТ-5 показана на рис. 52. Токовая защита крана ККТ-5 состоит из шести токовых реле, включенных в цепи питания электропривода передвижения крана и электрической тали. Цепь управления имеет плавкие предохранители FU1 и FU2, катушки линейного контактора КМ 1.1 и магнитного (реверсивного) пускателя КМ2.1 и КМ3.1 передвижения крана. Они блокированы соответственно контактами механических расцепителей SF1 и SF2, размыкающими контактами аварийного выключателя SB2 и конечных выключателей SQ1 и SQ2. Для управления талью имеются кнопочный пост управления магнитные реверсивные пускатели КМ4, КМ5 и КМ6, КМ7.
После включения рубильника нажатием кнопки «пуск» (SB16) замыкается цепь катушки линейного контроллера КМ 1.1. Одновременно с включением силовой цепи главными контактами контактора КМ1.2 его блок-контакты КМ1.3 и КМ 1.4 замыкают цепи управления 4—6, 3—7. Кнопку SB1 можно отпустить.
Главный контактор включен, но движения не происходит, так как силовая цепь разомкнута. Необходимо повернуть рукоятку контроллера S/4/ в положение «вперед» или «назад», тогда замкнется цепь катушки пускателя КМ2.1 или КМ3.1, обмотки двигателя будут под напряжением. Постепенный вывод пусковых сопротивлений обеспечивает разгон крана. При включенной катушке контактора КМ2.1 блок-контакт КМ2.3 разрывает цепь катушки другого контактора, что предохраняет силовые цепи от короткого •замыкания.
Рекламные предложения на основе ваших интересов:
Дополнительные материалы по теме:
Аналогичная электрическая блокировка кнопочного поста SA2 управления реверсивными магнитными пускателями подъема и передвижения электротали. При нажатии кнопки «вверх» включается цепь управления 7—9—11— 12—А15 с катушкой контактора К4.1 — происходит подъем крюка. При одновременном нажатии обеих кнопок поста цепи катушек размыкаются, подъем прекращается. Прекращение подъема происходит и при снятии пальца с кнопки «вверх».
Для удобства работы на кнопочном пульте расположена кнопка аварийного выключателя SB2, которая размыкает цепи катушек реверсивного пускателя КМ2.1, КМ3.1 и линейного контактора КМ1.1. Два механических, расцепителя SF1 и SF2 предохраняют двери защитной панели и кабины от самопроизвольного открытия во время работы крана.
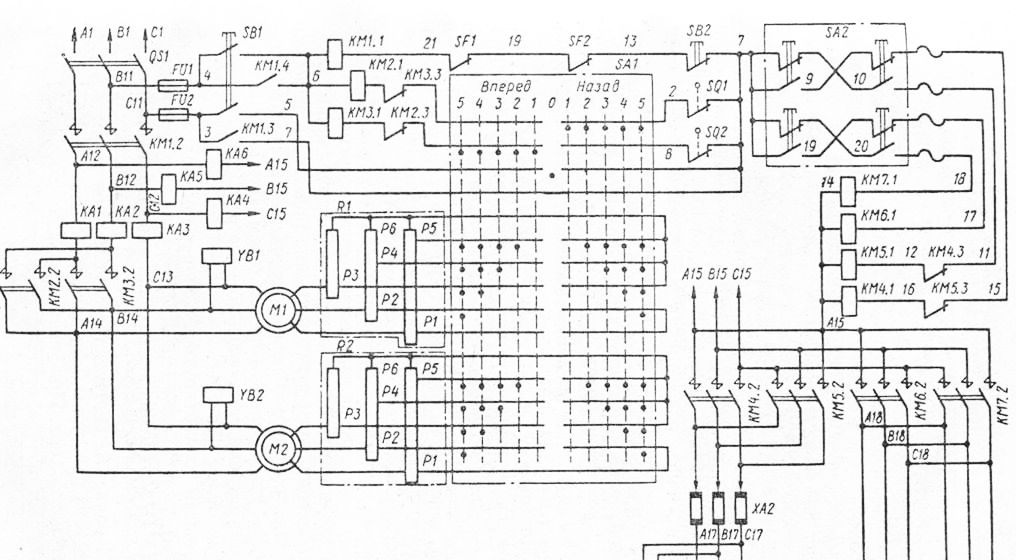
Рис. 52. Электрическая схема крана ККТ-5
На позиции 1 контроллера SA1 в цепь роторных обмоток вводится полный комплект сопротивлений. Далее переводят рукоятку контроллера во 2-ю позицию, при этом часть пускового сопротивления выводится, двигатели развивают некоторую скорость. Переводя рукоятку контроллера последовательно на 3, 4, 5-ю позиции, выводят остальные секции пусковых сопротивлений из цепи роторных обмоток и соединяют их накоротко. Двигатели работают на естественной характеристике, развивая максимальную скорость передвижения крана.
При вращении рукоятки от нулевого положения в левую сторону включается катушка КМ2.1 реверсивного пускателя «назад» с одновременным отключением катушки КМ3.1, контактами КМ2.2 и КМ2.3 переключаются полюсы статорных обмоток двигателей — кран движется назад.
Тормозные магниты YB1 и YB2 включены в силовую цепь двигателей и не имеют дополнительных командоаппаратов. Торможение крана происходит на нулевой позиции контроллера в момент прекращения подачи напряжения на статорные обмотки ротора.
Короткозамкнутые двигатели МЗ, М4, М5 электротали включаются и реверсируются магнитными пускателями КМ4, КМ5, КМ6, К.М7, управляемыми из кабины машиниста с помощью кнопочного поста S/43 кнопками «подъем», «спуск», «вперед», «назад». К встроенному в грузовой барабан электродвигателю подъема груза напряжение подается посредством кольцевого токосъемника ХА2.
Токовая защита. Схему токовой защиты крана КПБ-10М (рис. 53) собирают на заводе-изготовителе кранов.
На входе силовой цепи установлен рубильник QS1, при включении которого напряжение подается к силовым цепям электроприводов передвижения груза, грузовой тележки, рабочих органов и прожекторам. Для контроля напряжения в схеме установлен вольтметр PV1, включаемый переключателем фаз SA1.
Основным коммутирующим аппаратом является главный контактор силовой цепи КМ1. В цепи катушки контактора КМ1.1 установлен предохранитель FU6, кнопки пуска SB1 аварийный выключатель SB2 и переключатель цепей S^4<?. Кнопка SB1 шунтируется блок-контактом КМ 1.3, замыкаемым при включении силовых контактов КМ1.2 линейного контактора. При снятии пальца с кнопки SB1 цепь катушки контактора остается замкнутой.
Цепи электроприводов передвижения моста, подъема груза, передвижения тележки, грузозахватных устройств защищены максимально-токовыми реле КА1—К А 9, установленными в аппаратном шкафу крана.
Для питания цепей управления, освещения и сигнализации в одну из фаз силовой цепи включают трансформатор 77, с вторичной обмотки которого напряжение 220 В получают цепи управления 7—8 и напряжение 36 В — цепи освещения и сигнализации 78—80. На пульт управления выведены две сигнальные лампы, фиксирующие замыкание главного контактора КМ1 и наличие напряжения в цепи сигнализации. Цепи управления 7—8 на мосту крана остаются под напряжением независимо от состояния главного контактора силовой цепи.
В цепи кнопок пуска SB1 и аварийного выключателя SB2 имеется переключатель 5Л5 для приведения крана к работе в спаренном виде.
Токовая защита кранов ККТ-5, КК-5, ККС-10 выполнена на базе типовой защитной панели ПЗКБ-250. Схема этой панели представлена на рис. 54. В шкафу, блокированном механическими расцепителями SF1 и SF2, установлены рубильник QS1, главный контактор КМ1, кнопки пуска SB1 и SB2, предохранители цепи управления FU1 и FU2, токовые реле КА1 и КА2, клеммная панель XT. Кроме перечисленных аппаратов, в шкафу есть место для размещения трансформатора Т1 цепей освещения и сигнализации; трансформатор включают в силовую цепь с помощью двухполюсного автоматического выключателя QF1. В зависимости от конструкции крана могут быть применены трансформаторы ОСМ-0,63; 0с0-0,25 и др. Напряжение к защитной панели обычно подают непосредственно от вводного ящика Q1, а выводы идут в осветительную цепь EL1, цепь управления S1 и к аппаратам, коммутирующим силовые цепи А2.
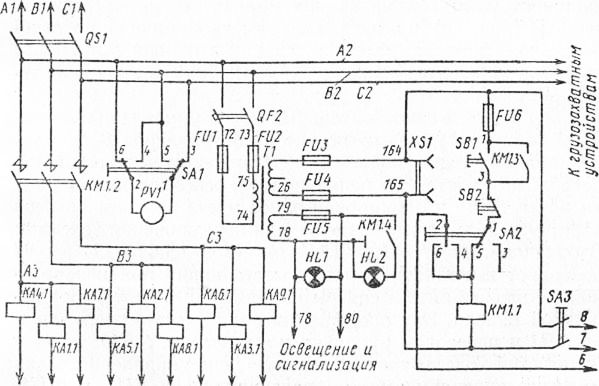
Рис. 53. Электрическая схема токовой защиты крана КПБ-10М
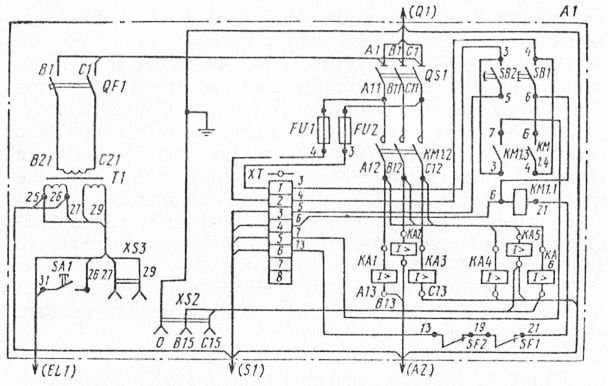
Рис. 54. Электрическая схема типовой защитной панели ПЗКБ-250
Защитная панель крана ККС-10 расположена в передвижной кабине, поэтому и коммутация несколько отличается от принятой на других кранах. В схеме токовой защиты (рис. 55) принята наиболее экономичная последовательная прокладка цепей, так как эти цепи выполнены гибкими кабелями, соединяющими кабину с грузовой тележкой и мостом.
Одна из трех самостоятельных цепей управления соеди-чие. контакты нулевых позиций контроллеров всех трех механизмов крана: подъема, передвижения тележки и передвижения моста. Эта цепь служит в основном для проверки коммутации и блокировки цепей моста при независимой работе приводов подъема груза или передвижения тележки. Вторая цепь А1—КМ1.4—154—156—150—SA1—13—6—B1 позволяет выполнять маневры моста крана при неисправной токовой защите и снятом напряжении с контактора защитной панели. Эту операцию выполняют нажатием кнопки SB1 и переводом рукоятки контроллера SA16 в одну из позиций хода. В третью, главную цепь управления включены все аппараты защиты: предохранители FU7 и FU8, конечные выключатели SQ10 — подъема, SQ11 — передвижения тележки, SQ12 — передвижения крана, SQ7 — двери кабины, SQ8 и SQ9 — защиты шахты. В этой цепи имеются также выключатели (механические расцепители) аппаратных шкафов SF1 и SF2, кнопки пуска SB1 и аварийного выключателя SB2.
При нажатии кнопки «пуск» (SB1) под напряжением оказывается катушка КМ 1.1, так как все размыкающие контакты аварийного выключателя SB2 и конечных выключателей замкнуты, а рукоятки контроллеров SA14 и SA15 находятся в нулевом положении, соответствующем замкнутому состоянию их контакта 1. Кнопку можно отпустить, потому что цепь заблокирована блок-контактом КМ1.3, а блок-контакт КМ1.4 подготовил главную цепь управления грузовой тележкой. Для выключения главного контактора КМ.1 в нулевом положении рукояток контроллеров SA14, SA15 и SA16 служит кнопка SB3.
Передвижение моста крана осуществляют переводом рукоятки контроллера в первое положение «вперед» или «назад». Катушка магнитного пускателя моста КМ2.1 при этом оказывается под напряжением и замыкает силовую цепь тормозов и рельсовых захватов. При разжатии рычагов захватов срабатывают их конечные выключатели SQ5 и SQ6, замыкая цепь управления передвижением моста. В эту цепь включены катушки контакторов направления КМ3.1 и КМ4.1, электропривода грузовой тележки КАИ, КА12. Токовые реле К А16, К А17 установлены в защитной панели, а привода передвижений — в аппаратном шкафу на мосту крана.
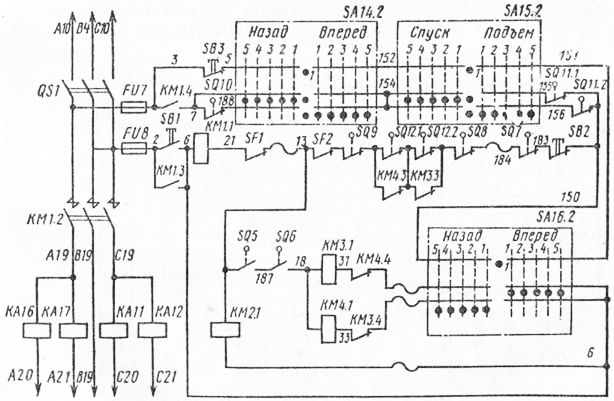
Рис. 55. Электрическая схема цепей управления крана ККС-10
В схему токовой защиты крана КК-5 (рис. 56) включен трехполюсный разъединитель SA1, позволяющий включать цепи управления механизмов крана до подачи к ним силового напряжения и создавать возможность автоматического отключения этих цепей при срабатывании защиты.
В нормальном (левом) положении контакты разъединителя 5/4/ подключают одну фазу силовой цепи JI1—Л2 к цени управления 1У1 (2У1)—У2. Это необходимо для проверки работы аппаратов управления и грузовых захватов при отключенной силовой цепи.
Перед подачей силового напряжения к механизмам крана необходимо разъединитель SA1 перевести в правое положение, при этом подготавливаются две цепи: цепь питания аппаратов управления механизмами передвижения и подъема груза Л10—1У1 (2У1) …Л20—У2 и цепь защиты J11—15—21—Л2. Однако обе эти цепи остаются разомкнутыми основным КМ 1.2 и блокировочным КМ 1.3 контактами линейного контактора КМ1.
При нажатии пусковой кнопки SB1 защитной панели наводится напряжение в цепи катушки линейного контактора КМ1.1, к механизмам крана через контакты КМ1.2 подается силовое напряжение. Машинист может прекратить нажатие кнопки SB1, так как при размыкании ее контактов цепь катушки КМ 1.1 будет замкнута блок-контак-том линейного контактора КМ 1.3. Силовая цепь находится под напряжением до того момента, пока машинист не нажмет кнопку аварийного выключателя SB2 или пока не произойдет автоматического разрыва цепи защиты при сгорании предохранителя, срабатывании токового реле, выключателя двери.
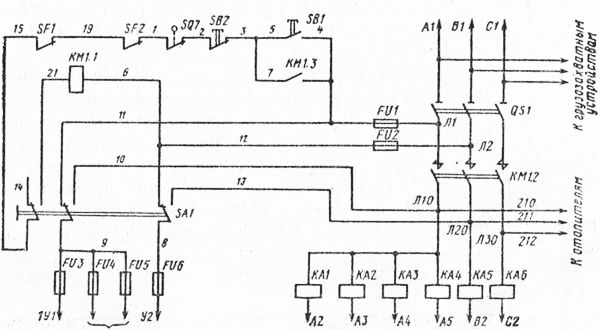
Рис. 56. Электрическая схема цепей управления крана КК-5 112
Токовые реле РЭО-401 на кране КК-5 отрегулированы на следующие номинальные токи: КА5 и КА6 на 100 А; КА1 и КА2 на 40 А; КАЗ на 6 А; КА4 на 100 А; на кране ККТ-5: все реле на 40 А; на кране ККС-10: КА-10, КА-11 на 39 А; К А12, К А14 на 120 А; КА13 — 131 А; К А15, К А16, КАП — 177 А; на кране КПБ-10М токовые реле РЭ-575т отрегулированы: КА1, КА2;КАЗ на 16 А; КА4, КА5, КА6 на 160 А и КА7, КА8 и КА9 на 250 А.
Электропривод передвижения крана. В электрической схеме передвижения крана КК-5 (оцс. 57) применен магнитный контроллер ТА-161 в комплекте с дополнительным блоком регулирования скорости. Управление контроллером осуществляют с пульта управления машиниста, в который встроен командоконтроллер.
Схема объединяет три блока управления А2, A3, А4 и агрегаты привода: электродвигатели Ml и М2, гидротолкатели тормозов МЗ и М4. Блок А2 — командоконтроллер SA1 имеет нулевое положение и четыре позиции «вперед» и четыре позиции «назад». Контакты в позициях расположены по симметричной схеме.
В состав блока магнитного контроллера ЛЗ входит схема A3.2 контакторного блока с тремя двухполюсными контакторами: КМ2 — контактор движения вперед, КМЗ — контактор движения назад, КМ6 — контактор включения гидротолкателя тормоза; схема контакторов включения резисторных блоков АЗ.З и коммутационная схема А3.1. Разделение схемы магнитного контроллера на три схемы принято условно. Все аппараты в изделии A3 смонтированы на одной панели.
Рассмотрим коммутационную схему A3.1. В нее включены две катушки контакторов направления КМ2.1 и КМ3.1, катушка контактора тормоза КМ6.1, две катушки контакторов ускорения КУ1.1, КУ2.1 и катушка контактора про-тивовключения КМ5.1, а также катушки: реле нагрузки — КН1.1, блокировочного — КБ1.1, выдержки времени — КТ1.1, КТ2.1 и противотока — КП1.1. Контакторы управляют высокими токами в силовых цепях статора и ротора фазных электродвигателей тележек передвижения крана, а реле коммутируют цепи управления на различных позициях командоконтроллера.
В нулевой позиции под напряжением оказывается лишь одна катушка реле нагрузки КН1 1 — восстанявливается цепь 1У1—41—SQL 1—SQ1.2—71—КН1 1—У2 Механизм передвижения крана подготовлен к работе. Замыкающий контакт реле нагрузки К.HI.2 замкнулся и подготовил цепь первой ступени командоконтроллера к работе.
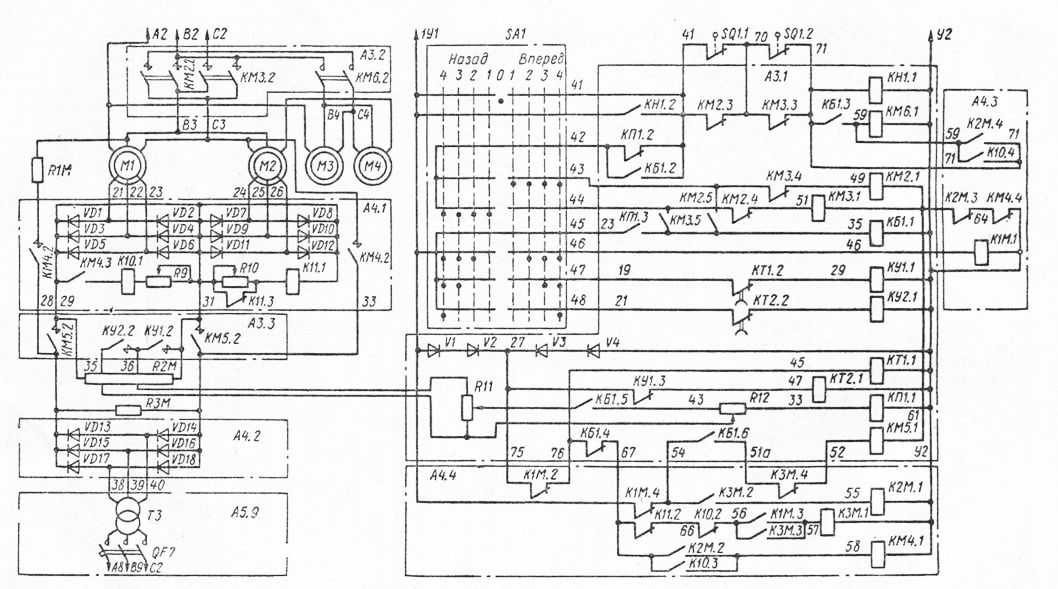
Рис. 57. Электрическая схема привода передвижения моста крана КК-5
Машинист переводит рукоятку командоконтроллера в 1-ю позицию положения «вперед». Восстанавливается цепь катушки КМ2.1: 1У1—КН1.2—КП1.2—42—43—КМ2.1— 61—64—У2. В результате включения катушки КМ2.1 замыкаются силовые контакты линейного контактора КМ2.2, в обмотки статоров подается напряжение силовой цепи, в обмотках ротора наводится э. д. с. Вместе с этим срабатывает блокировочное реле КБ1, так как под напряжением оказывается его катушка КБ1.1 в цепи 1У1—КН1.2—КП1.2— 42—43—КМ2.5—35—КБ1.1—У2. Замыкаются блокировочные контакты в цепях тормозного гидротолкателя и реле противовключения КП1. Это реле в свою очередь замыкает контакт КП1.3 в цепи катушки блокировочного реле, подготавливая независимую блокировочную цепь при работе механизмов в режиме противовключения. Контакторы разгона и реле выдержки времени при разгоне включаются на последующих позициях командоконтроллера. В целях надежности катушки реле времени и противотока получают питание от выпрямительного моста VI—V4.
Мы рассмотрели порядок работы аппаратов магнитного контроллера ТА-161 как автономного аппарата, но в схеме электропривода крана КК-5 магнитный контроллер A3 работает с дополнительным блоком регулирования скорости А4. На схеме этот блок изображен в четырех позициях: выпрямительного моста напряжения цепи ротора А4.1, выпрямительного моста подпорного напряжения А4.2 и двух коммутационных аппаратов А4.3 и А4.4. Фактически блок работает с двумя магнитными контроллерами ТА-161 механизмов передвижения крана и грузовой тележки, поэтому к нему относятся также выпрямительный мост цепи ротора электродвигателя передвижения тележки А4.5, выпрямительный мост подпорного напряжения А4.6, коммутационные аппараты грузовой тележки А4.7 и А4.8 (см.рис. 60).
Применение магнитного контроллера с дополнительным блоком позволяет осуществлять регулирование скорости в диапазоне 1 : 10, получать устойчивую ползучую скорость, равную 10% от номинальной. Такое регулирование и ползучая скорость необходимы для точной остановки груза или грузового захвата при наводке его в ограниченную зону или на присоединительные устройства контейнеров.
Схема позволяет обеспечить плавный разгон крана до максимальной скорости в наиболее оптимальный регулируемый отрезок времени, плавное электродинамическое торможение с автоматическим переходом на ползучую скорость. Применение выпрямительного блока в обмотках роторов двух электродвигателей передвижения моста создает эффект электрического вала — электрической связи по постоянному току в цепи роторов. Электрический вал обеспечивает равномерную загрузку двигателей при перекосах моста, уменьшает до минимума износ реборд ходовых колес.
Рассмотрим работу электросхемы с дополнительным блоком регулирования скорости. Как видно из блока А4.1, цепи роторов электродвигателей Ml и М2 подключены через трехфазные кремниевые выпрямители VD1—VD6 и VD7—VD12 к общему сопротивлению R2M. При пуске крана на 1-й позиции командоаппарата SA1 срабатывает контактор противовключения КМ5, так как в цепи 1У1 — К1М .4 —4—КБ 1.6—51а—КЗМ .4—52—КМ5.1—61— К2М.З—КМ4.4—У2 на 1-й позиции замыкается контакт блокиройочного реле КБ1.6, а катушка КМ5.1 получает напряжение. Силовые контакты КМ5.2 контактора противовключения замыкают цепи выпрямленного напряжения роторов электродвигателей и подпорного напряжения выпрямителей VD13—VD18 на общую нагрузку — сопротивление R2M (блок пусковых резисторов). Сопротивление R3M служит для защиты диодов подпорного моста от перенапряжения.
Необходимым условием параллельной работы выпрямительных мостов на общую нагрузку является равенство выпрямленных напряжений на их вводах. В данном случае равенство напряжений на выходе мостов, которые работают параллельно на общую нагрузку R2M, может быть достигнуто за счет изменения частоты вращения электродвигателей Ml и М2 или за счет изменения задающего напряжения выпрямительных мостов VD13—VD18, получающих питание от трансформатора ТЗ.
При пуске двигателей скольжение равно 1, э. д. с. имеет максимальное значение, и выпрямленное напряжение цепи роторов превышает значение выпрямленного подпорного напряжения на 10—15%. Подпорное напряжение, оставаясь заданным от трансформатора ТЗ, запирается. Ток протекает только по роторным обмоткам двигателей, диодам выпрямительных мостов VD1—VD6, VD7—VD12 и сопротивлению R2M. Наведенная э. д. с. в роторных обмотках развивает крутящий момент, двигатель начинает вращение до достижения скорости 10—15% от номинальной. Когда э. д. с. в роторных обмотках снижается до величины задающего подпорного напряжения и ниже его, происходит запирание выпрямительных мостов VD1—VD6 и VD7—VD12. Это приводит к прекращению тока в роторных обмотках, а следовательно, и к торможению механизма моментом статического сопротивления. Затормаживаясь, мост снижает обороты двигателей, а это увеличивает скольжение и э. д. е., что в свою очередь приводит к запиранию подпорного напряжения. Так автоматически поддерживается заданная подпорным напряжением частота вращения роторов двигателей на уровне 10—15% от номинальной — создается ползучая скорость крана на 1-й позиции командо-контроллера. На этой же позиции под действием э. д. с. роторов включается катушка реле /(//./, отрегулированная резистором R10 на определенное напряжение. Контакт этого реле размыкает цепь катушки реле КЗМ.1, не позволяет замкнуться цепи катушки К2М.1 и разомкнуться цепи катушки контактора подпора КМ5.1.
Если кран на 1-й позиции не разгоняется при пуске до ползучей скорости, необходимо уменьшить величину подпорного напряжения снижением напряжения на трансформаторе ТЗ до 210—200 В перекидкой проводов на анцапфах высокого напряжения. Если при переводе из нулевой в 1-ю позицию происходит толчок крана, это означает, что контактор подпорного напряжения КМ5 не включается. Необходимо проверить схему.
Разгон крана осуществляют переводом рукоятки коман-доконтроллера во 2-ю, 3-ю и 4-ю позиции. При переводе во 2-ю позицию срабатывает реле К1М (схема А4.3), в результате чего снимается напряжение с катушки контактора КМ5.1, а его силовые контакты КМ5.2 разрывают цепь выпрямителя подпорного напряжения VD13—VD18 с общей нагрузкой R2M. Двигатели разгоняются до скорости 30— 40%. от номинальной, так как не создается запора напряжения в роторной цепи, и напряжение снижается только сопротивлением нагрузки R2M.
Далее разгон двигателей осуществляют магнитным контроллером. На 3-й позиции через размыкающий контакт реле времени КТ1.2, отрегулированный на определенную выдержку времени, в цепь /У1—47—19—КТ1.2—29— /СУ/./—2У включается катушка контактора разгона /СУ/./, контактор своим силовым контактом /(У/.2 отключает часть сопротивлений резистора R2M. Цепь управления на 3-й позиции разгона может быть разомкнута после срабатывания реле времени КТ1, контакт которого КТ1.2 разрывает цепь катушки /СУ/./, но при этом замыкается блок-контакт КУ1.3 в цепи реле времени КТ2. При условии перевода рукоятки командоконтроллера в 4-ю позицию замыкается цепь 1У1—48—21—КТ2.2—39—КУ2.1—У2, получает питание катушка контактора разгона КУ2.1
После 2-й позиции машинист может перевести рукоятку командоконтроллера сразу в 4-ю позицию — разгон крана произойдет автоматически с выдержкой позиций с помощью реле времени. По мере разгона крана на 2-й позиции реле К11 отключается, так как индукция ее катушки, включенной последовательно с регулируемым резистором R10, снижается ввиду гашения напряжения в цепи ротора. Замыкается цепь катушки реле КЗМ.1. Замыкающий контакт КЗМ.2 подготавливает реле К2М к режиму динамического торможения крана.
Торможение может быть осуществлено из любой позиции разгона переводом в 1-ю или нулевую позиции рукоятки командоконтроллера. При переводе рукоятки в 1-ю позицию происходит переход крана на ползучий режим передвижения, а в нулевую — торможение до полной остановки крана.
При переводе рукоятки командоаппарата в 1-ю позицию выключается цепь катушки реле К1М.1, замыкается блок-контакт этого реле в цепи катушки постоянного тока контактора динамического торможения КМ4, восстанавливается цепь управления 1У1—75—76—КБ1.4—67—К2М.2— К4М.1—У2 и одновременно размыкаются цепи катушек контактора направления КМ2.1 и реле КБ1.1. Статоры электродвигателей моста отключаются от внешней сети, но на их обмотки подается напряжение выпрямленного тока диодами подпорного напряжения VD13—VD18 через нагрузочный резистор R1M, так как силовые контакты контактора торможения КМ4.2 замкнулись. Теперь в обмотках статора наводится э. д. е., противоположная электродвижущей силе, образуемой вращением ротора, а следовательно, происходит торможение ротора. Электродинамическое торможение осуществляется под контролем реле скорости КЮ, отрегулированного резистором R9. Катушка этого реле КЮ. 1 включается блок-контактом КМ4.3 в начале торможения. Когда на 1-й ступени командоконтроллера частота вращения ротора снизится до 10—15% от номинальной, понижается напряжение в цепи ротора, а значит и в катушке реле К 10.1. Реле КЮ открывает свой замыкающий контакт КЮ.3 в цепи катушки контактора электродинамического торможения КМ4.1 и закрывает размыкающий контакт К10.2 в цепи катушки реле КЗМ.1. Размыкаясь, контактор электродинамического торможения КМ4 прекращает подачу напряжения выпрямленного тока на статорньге обмотки, размыкает свой блок-контакт
КМ4.3 в цепи катушки реле скорости и включает блок-кон-такт КМ4.4 в цепи катушек контакторов направления КМ2.1 и КМ3.1. Ввиду включения одного из контакторов направления, а точнее его блок-контактов КМ2.5 или КМ3.5, под напряжением оказываются катушки блокировочного реле КБ1.1 и контактора подпорного напряжения КМ5.1. Контакт реле КБ1.3 замыкает ранее разомкнутую контактами реле электродинамического торможения К2М.4 и скорости К10.4 цепь катушки тормозного контактора КМ6.1, а контакты КМ5.2 — цепь подпорного напряжения. Создается баланс напряжений в системе выпрями^ тельных мостов VD1—VD6-, VD7—VD12-, VD13—VD18. Механизмы работают в режиме «ползучей» скорости.
При переводе рукоятки командоконтроллера в 0-ю позицию происходит торможение крана, так как цепи катушек контакторов направления КМ2.1, КМ3.1, блокировочного реле КБ1.1, контакторов тормоза КМ6.1 и подпорного-напряжения КМ5.1 разрываются, под напряжением остаются лишь катушки реле нагрузки КН1.1, которые отключаются лишь при снятии напряжения в цепи управления приводом.
При переводе рукоятки контроллера в нулевую позицию со 2, 3 или 4-й позиций без задержки на 1-й позиции происходит электродинамическое торможение до полной остановки крана, так как цепи катушек КМ2.1 или КМ3.1, КБ 1.1 и КМ5.1 остаются не включенными.
Когда кран движется под уклон или при сильном попутном ветре, электродинамического торможения оказывается недостаточно для торможения, и реле КЮ не отключается. В »этой случае прибегают к торможению в режиме противо-включения на 1-й или 2-й позициях обратного направления.
В некоторых режимах работы козлового крана нет необходимости прибегать к ступенчатому разгону сначала до ползучей скорости, а затем до номинальной. Машинист крана может с нулевой позиции резко перевести рукоятку командоаппарата в 3-ю или 4-ю позиции. Произойдет автоматический плавный разгон крана под контролем реле противотока КП1 и реле времени КТ1 и КТ2. Благодаря отрегулированным потенциометрам R11 и R12 реле КП1 включается при достижении краном скорости 5% от номинальной, замыкая при этом цепи блокировочного реле КБ1 и контактора разгона КУ1- Процесс разгона крана происходит, минуя ползучую скорость, так как катушка контактора подпора КМ5.1 расцеплена блок-контактом К1М.4.
В цепь реле нагрузки включены контакты конечных выключателей SQ1.1 и SQ1.2. При наезде рычага .выключателя на тормозную рейку кранового пути происходит разрыв цепи 1У1—41—70—КМЗ.З—КН 1.1—У2. Замыкающий контакт КИ1.2 разрывает цепь катушек контакторов направления КН1.1 и контактора гидротолкателей тормозов КМ6.1 Электропривод обесточивается, происходит экстренное торможение с наложением тормозов.
Электроприводом моста крана КПБ-10М (рис. 58) управляет магнитный контроллер оригинальной конструкции, работающий в комплекте с типовым кулачковым контроллером ККТ-62А, установленным в кабине управления краном.
В нулевом положении рукоятки контроллера S.49 цепь управления 7—8 замкнута, движения не происходит, так как разомкнуты контакты реверсирующих контакторов К Мб.2 и КМ7.2 силовой цепи. При переводе рукоятки в 1-ю позицию под напряжением оказываются сразу две цепи: цепь токовой защиты с катушкой промежуточного реле К3.1 и цепь катушки контактора КМ7.1 при рукоятке контроллера «назад» или К.М6.1 при положении «вперед». Цепи блокируют: первую — размыкающие контакты ограничителя передвижения SQ4.1 и SQ4.2, контакты токовых реле КА7.2, КА8.2 и КА9.2, вторую — размыкающие контакты контакторов направления (при включенном контакторе заднего хода КМ7.3 блок-контакт переднего хода /(М6.3 и наоборот). Такая блокировка позволяет снять часть напряжения с помощью замыкающих контактов промежуточного реле КЗ.2 и КЗ.З при упоре в концевой ограничитель пути, при коротких замыканиях или сверхнормативных нагрузках и при противовключении.
Катушки КМ7.1 или КМ6.1 замыкают главные контакты контакторов КМ7.2 или КМ6.2. Силовая цепь передвижения крана оказывается под напряжением — в цепи роторов полное сопротивление резисторов. При переводе рукоятки контроллера во 2-ю позицию замыкается цепь катушки первого контактора ускорения КМ9.1. При этом отключается первая ступень сопротивления резисторов, начинается разгон крана. Последняя ступень сопротивлений отключается контактором ускорения КМ11.
При работе крана КПБ-10М в спаренном состоянии один из приводов передвижения отключают.
Электрическая схема передвижения козлового крана ККС-10 (рис. 59) во многом похожа на схему крана ККТ-5. Силовую цепь коммутируют магнитный пускатель КМ2, максимально-токовые реле К А13, К А14, КА15 и типовая реверсивная панель А1 Кран имеет два электродвигателя Ml и М2, два тормоза, оборудованных гидротолкателями М7 и М8. Управление электроприводом осуществляется с помощью контроллера SA16, который своими контактами включает и выключает секции сопротивлений R1 и R2 в цепи роторных обмоток двигателей. Отключение части сопротивлений происходит на 2-й позиции, движение крана ускоряется. На 5-й позиции контактами контроллера SA16 выводятся все дополнительные сопротивления — кран работает на полной скорости в режиме естественных характеристик электродвигателей.
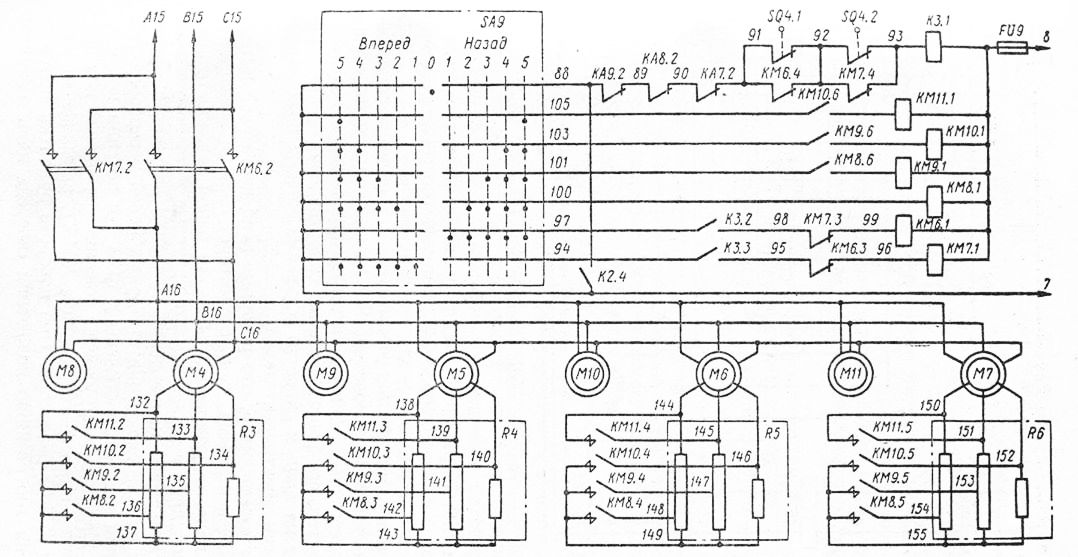
Рис. 58. Электрическая схема привода передвижения моста крана КПБ-10М
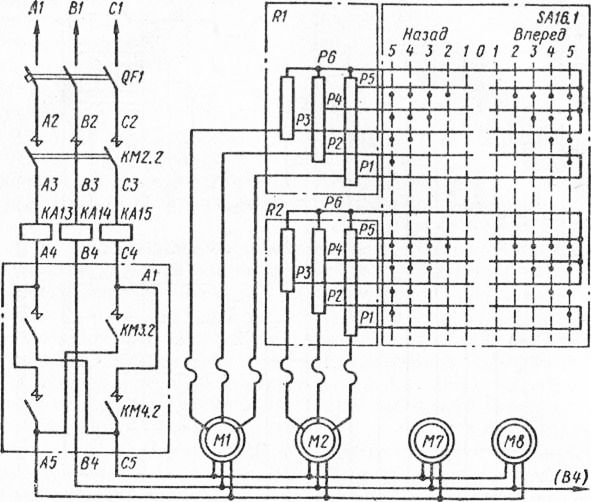
Рис. 59. Электрическая схема привода передвижения моста крана ККС-10
Из схемы видно, что роторные цепи двигателей выполнены независимыми, т. е. отсутствует система электрического вала, а возможные забегания одной тележки относительно другой воспринимают крановые металлоконструкции. Изменение направления вращения двигателей происходит при переключении статорных цепей реверсором А1У катушки которого включены в цепь 1-й позиции контроллера. При повороте рукоятки контроллера «назад» под напряжением оказывается катушка КМ3.1, замыкающая контакты КМ3.2 реверсора. При повороте рукоятки контроллера на 1-ю позицию положения «вперед» цепь катушки
КМ3.1 размыкается, а цепь катушки КМ4.1 замыкается, это позволяет замкнуть контакты КМ4.2 и разомкнуть контакты КМЗ.2, двигатели вращаются в противоположном направлении.
Отключение привода от силовой цепи происходит при разомкнутых контактах магнитного пускателя КМ2.2, катушка которого включена в цепь защитной панели 6—13.
Электропривод грузовой тележки. Кран КК-5 рассчитан на двухскоростную работу механизмов передвижения тележки и подъема грузов.
Применение типового магнитного контроллера ТА-161 в комплекте с блоком регулирования скорости обеспечивает: регулирование скорости грузовой тележки в диапазоне 1 : 10, получение устойчивой ползучей скорости на 1-й позиции командоконтроллера, динамическое торможение с автоматическим переходом на ползучую скорость при возврате рукоятки командоконтроллера в 1-ю позицию, динамическое торможение, обеспечивающее снижение скорости до 10% от номинальной с последующим наложением тор. мозов при возврате рукоятки контроллера в 0-ю позицию.
Для управления электроприводом подъема применен магнитный контроллер ТСД-160, работающий в комплекте с трехфазным выпрямительным мостом VD31—VD36. Подключение моста к обмоткам статора при торможении обеспечивает режим динамического торможения со скоростью 15% от номинальной.
Управление механизмами грузовой тележки осуществляется с кресельного пульта, командоконтроллеры которого собраны по схемам: контроллера ККТ-68А для управления передвижением тележки и командоконтроллера КП-1246— для управления подъемом и опусканием груза.
На рис. 60 приведена принципиальная схема управления передвижением грузовой тележки крана КК-5. Эта схема аналогична рассмотренной схеме передвижения моста крана КК-5 (см. рис. 57). Отличается она только одномоторным приводом, в связи с чем изменены и параметры сопротивлений резисторных блоков.
В схемах передвижения моста и тележки применен единый блок регулирования скорости, посредством которого создается ползучая скорость и осуществляется электродинамическое торможение. Этот блок собран на рейках в шкафу электрооборудования над кабиной крановщика. В состав блока входят 30 кремниевых диодов: 18 диодов ВЛ-200, из которых скомплектованы выпрямительные мосты электродвигателей передвижения моста и 12 диодов ВЛ-25 для комплектации выпрямителей электродвигателей грузовой тележки. Для контроля скорости в режиме разгона и динамического торможения использованы реле РПУ-1 на 24 В (К10, К12) и на 240 В (К11 и К13). В качестве контактора динамического торможения в схеме моста КМ4 применен контактор КПД-121 с катушкой постоянного тока 220 В, а в схеме тележки КМ9— пускатель ПМЕ-211 на 380 В. В качестве блокировочных реле KIM, К2М, КЗМ в схеме моста и К5Т, К6Т, К7Т в схеме тележки использованы магнитные пускатели ПМЕ-111 на 380 В. Для регулировки реле противотока магнитного контроллера применены резисторы Rll, R15 типа ППЭ-43 на 470 Ом и R12, R16 типа ППЭ-43 на 63 кОм.
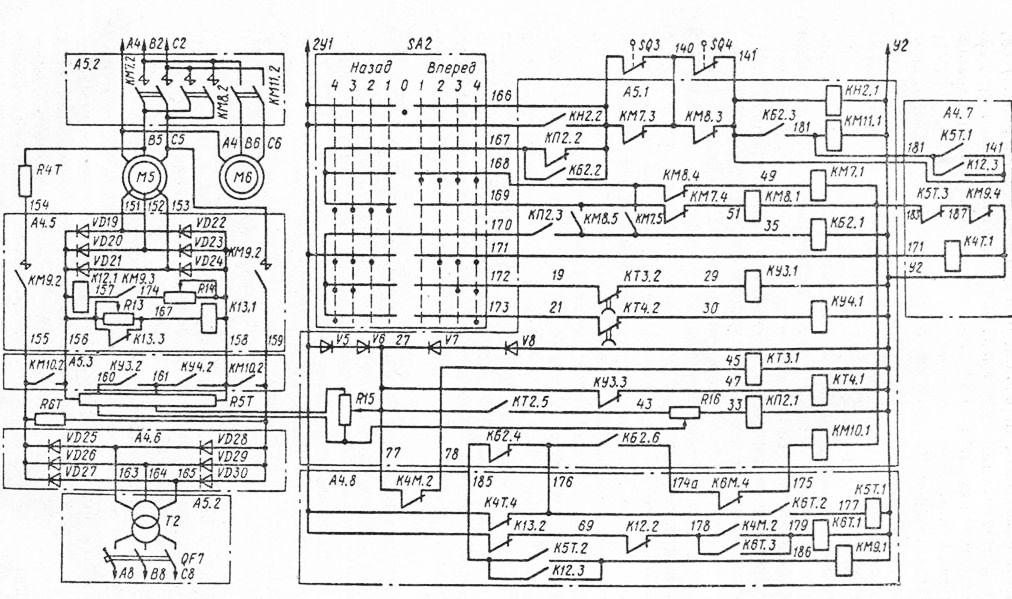
Рис. 60. Электрическая схема привода передвижения грузовой тележки крана КК-5
Подпорное напряжение в диодах VD13—VD18 и VD25— VD30 создается трансформаторами: в схеме тележки Т2 типа ТСЗ 2,5/1 на напряжение 500/127 В, 2,5 кВА, в схеме моста ТЗ типа ТСЗ 10/0,5 на напряжение 380/220 В, 10 кВА. Заводское регулирование величины подпорного напряжения, как правило, обеспечивает заданную величину ползучей скорости 10% от номинальной. Если кран или тележка не получают этой скорости, необходимо уменьшить величину подпорного напряжения на зажимах выпрямителей, включенных в цепь ротора. В схеме тележки достаточно, например, «плюс» выпрямителя VD19—VD24 отсоединить от схемы и присоединить к проводу 160 (зажим контактора ускорения КУ3.2).
Электроприводом подъема груза управляют с помощью командоконтроллера, имеющего несимметричную развертку, позволяющую задавать электродвигателю в положениях «подъем» и «спуск» различные режимы. При подъеме груза регулирование скорости электродвигателя производится выведением сопротивлений из роторной цепи с помощью контакторов ускорения. При спуске груза на первых трех позициях командоконтроллера электродвигатель работает в режиме динамического торможения с самовозбуждением. В этом случае электродвигатель отключается от сети, а его ротор через трехфазный выпрямитель VD31—VD36 присоединяется к двум фазам статора. Электродвигатель вращается под действием груза, а выпрямленная э. д. с. ротора обеспечивает в статоре магнитную индукцию, противоположную вращению ротора, — создается электродинамическое торможение. При этом скорость спуска груза не зависит от величины груза и регулируется только величиной сопротивления, включенного в роторную цепь электродвигателя последовательно с выпрямителем. При выведенном сопротивлении скорость спуска примерно равна 5 м/мин при номинальной скорости подъема 20 м/мин.
Рассмотрим работу электросхемы подъема груза (рис. 61). При включении цепи управления автоматическим выключателем QF2 напряжение подается на катушку реле нагрузки KIJ3.1. Срабатывают замыкающие контакты КН3.2 и /С/73.3, выполняя предварительную подготовку к включению контактора торможения и командоконтрол-лера.
После перевода рукоятки командоконтроллера S./43 в 1-ю позицию положения «подъем» получают напряжение цепи управления А5—69—113—5—43—С2 и А5—69— 113—49—47—С2, в которые включены катушки линейного и блокировочного контакторов КМ12.1 и КМ15.1. Срабатывают силовые контакты КМ12.2 и КМ15.2, включив электропривод.
Вместе с тем в цепи постоянного тока, выпрямляемого диодами V9—V10, замыкается цепь блокировочного реле КБ 3, нормально открытый контакт которого замыкает цепь А5—69—115—КБ3.2—59—С2. Включается цепь катушки контактора тормозного гидротолкателя КМ 16.1 и расцепляются цепи контакторов КМ14 и КУ8. Ввиду соединения контактов КМ14.2, КМ16.2 и КМ15.2 тормоз размыкается, а статорные обмотки электродвигателя оказываются под напряжением. Роторные обмотки включены на максимальное сопротивление резисторов R71J — происходит выборка слабины каната.
На 2-й позиции контактором ускорения КУ5 выводится часть сопротивлений резистора R7I1. Механизм подъема совершает разгон. На 3-й и 4-й позициях этот разгон проходит под контролем реле времени КТ5, КТ6, КТ7. Как только восстановится цепь А5—117—15—61—С2 контактором ускорения КУ6 отключается вторая ступень сопротивления в цепи ротора. Под напряжением оказывается реле КТ7, а его нормально закрытый контакт в цепи катушки К У6.1 становится на выдержку времени. Поэтому, если машинист сразу переведет рукоятку в 4-е положение, контакты КУ6.2, КУ6.3, КУ6.4 не замкнутся, пока не сработает контакт реле времени КТ7.2. Контакторы КУ7 и КУ8, замыкаясь с выдержкой времени, выводят из цепи ротора все дополнительные сопротивления. Скорость подъема достигает максимального значения. Реле времени, поочередно замыкая цепи катушек контакторов ускорения, обеспечивают заданные интервалы выключения сопротивлений ротора и плановый набор скорости. При прекращении подъема машинист возвращает рукоятку в 0-е положение, цепи управления приходят в исходное положение, механизм затормаживается.
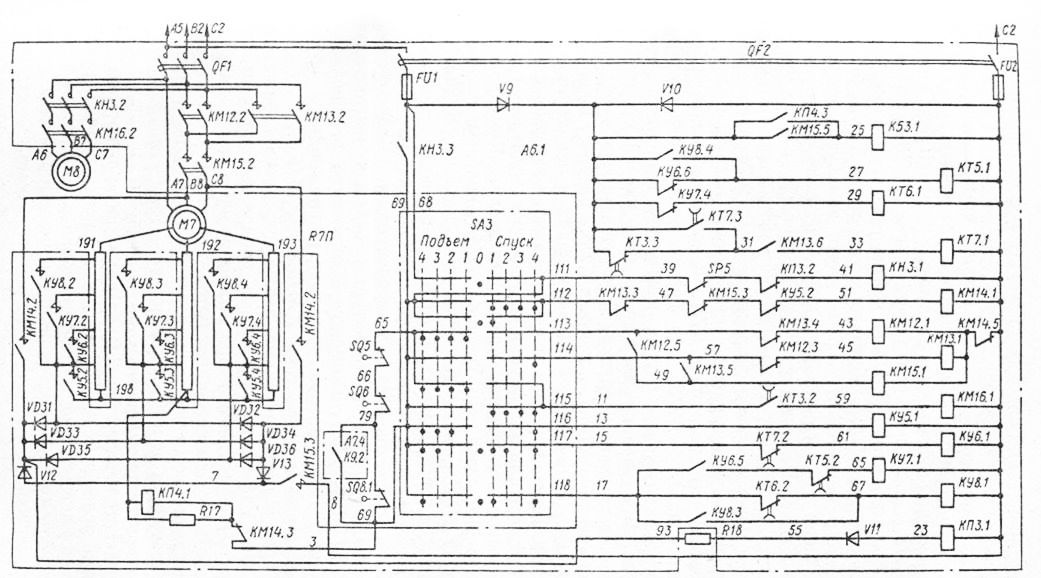
Рис. 61. Электрическая схема привода механизма подъема груза грузоподъемной лебедки крана КК-5
Для опускания груза рукоятку командоконтроллера машинист ставит в 4-ю позицию положения «спуск». Под напряжением оказываются следующие катушки реле нагрузки КН3.1, линейного контактора спуска КМ13.1, блокировочного контактора КМ15.1, контактора тормозного гидротолкателя КМ16.1, контактора ускорения КУ6.1, блокировочного реле КБ3.1. Кроме этого, замкнутся катушки реле цепи подмагничивания КП4.1 и реле постоянного тока КПЗ Л. Начинается силовой спуск груза.
В этом режиме работы электропривода скорость спуска близка к номинальной скорости подъема и ограничивается лишь внешней нагрузкой цепей ротора; нагрузку создают сопротивления резистора К7П. Кремниевые вентили выпрямителя VD34—VD36 хотя и не включены в цепь статора,, но в момент силового спуска испытывают напряжение тока ротора. В случае пробоя одного из вентилей произойдет смещение токовой нагрузки, включится катушка реле постоянного тока КПЗ Л, а контакт КПЗ.2 разорвет цепь реле нагрузки. Напряжение в силовых цепях и цепях управления снимается, грузовая тележка окажется заторможенной. На 3-й позиции положения «спуск» происходит электродинамическое торможение электродвигателя. Командоконтроллер разрывает цепь катушки КУ5.1, срабатывает блок-контакт КУ5.2, включается катушка контактора динамического торможения КМ 14.1, замыкаются контакты КМ14.2, включая цепь ротора через выпрямитель VD31— VD36 в одну из фаз электродвигателя. Блок-контакт КМ14.5 разрывает цепь катушек силовых контакторов КМ 13.1 и КМ 15.1, снимается напряжение внешней нагрузки в цепи статора электродвигателя подъема груза размыкающими контактами КМ13.3 и КМ15.3.
Заранее подмагниченные цепью буферного выпрямителя V12—V13 мосты кремниевых диодов выдают в статор напряжение, создающее иротивоиндукцию э. д. е., которую вырабатывает вращающийся ротор. Теперь скорость спуска зависит только от величины сопротивления в цепи ротора и включенных в нее выпрямителей.
Отключение сопротивлений происходит в следующей последовательности: на 2-й позиции после некоторой выдержки реле времени КТ7 включается контактор ускорения КУ6, отключается часть сопротивлений в цепи ротора электродвигателя, повышается напряжение выпрямленного тока, а следовательно, и противо-э. д. с. в обмотках статора, скорость спуска уменьшается. На 2-й позиции после некоторой выдержки времени замыкается размыкающий контакт КТ6.2 и включается катушка КУ8.1 контактора КУ8, включающего последнюю ступень сопротивления. Двигатель теперь работает с максимальным напряжением про-тивовключения — создается посадочная скорость груза 5 м/мин. При переводе рукоятки в 0-е положение спуск прекращается, так как цепь противовключения прерывается контактором КМ 14, а цепь электротормоза — контактором КМ 16.
В цепи катушек линейных контакторов КМ 12.1 и КМ 15.1 включены конечные выключатели ограничителя подъема груза SQ5 (УБ-15А на 20 А, 380 В, ВПК-4140 на 6,3 А, 380 В) и канатных датчиков SQ6 (ВПК-ПЮ на 6 А, 380 В). В цепи реле нагрузки и контактора гидротолкателя механизма передвижения тележки включены конечные выключатели SQ3 (КУ-701А на 25 А, 380 В) и SQ4 (КУ-701А на 25 А, 380 В). При разрыве цепи каждым из конечных выключателей снимается напряжение внешней сети, и электродвигатели затормаживаются. Исключение составляет канатный датчик SQ8.1, который шунтирован нормально открытым контактом К9.2 реле ПЭ21-3 электропривода автостропа. Реле срабатывает при условии закрепления всех четырех захватов автостропа фиксаторами. Второй контакт этого реле SQ8.2 включен в цепь пускателя КМ7 (ПМЕ-2113) привода автостропа.
В электроприводе грузовой тележки крана КПБ-10М применены промежуточные реле К1 и К2 типа РПУ-1-340 на 220 В, предназначенные для усиления коммутации цепей управления. Реверсирование электродвигателя подъема груза осуществляется контакторами КМ4 и КМ5, а передвижение тележки — реверсивным магнитным пускателем КМ2. Разгон и замедление электродвигателей происходят отключением или включением в роторные цепи пусковых сопротивлений R1 и R2 контроллерами 5Л6 и SA7.
Схема электропривода подъема груза (рис. 62) в нормальном положении разомкнута контактом К2.2 промежуточного реле К2. На 1-й позиции контроллера SA7 под напряжением оказывается катушка реле К2.1, благодаря чему замыкаются контакты реле К2.3 и К2.4 в цепях катушек контакторов КМ3.1 и КМ4.1. Если рукоятка переведена в сторону «подъем», под напряжением находится цепь катушки КМ4.1, блокируемая контактом конечного выключателя SQ3 и размыкающим контактом КМ5.3 контактора КМ5, что обеспечивает электрическую защиту при реверсировании электропривода. На 1-й позиции контроллера в цепь ротора включается все сопротивление R2, но постепенным выводом рукоятки контроллера в 5-ю позицию электродвигатель разгоняется и работает в режиме естественной характеристики. Если произошла перегрузка двигателя на короткое замыкание, срабатывает защита, одно из реле КА4, КА5 или КА6 размыкает свои контакты в цепи управления промежуточным реле К2. Катушки контактора КМ3.1 или КМ4.1 размыкают главные контакты КМ3.2 или КМ4.2 — силовая цепь размыкается, электродвигатель отключается от сети, грузовой крюк ставится на тормоз, так как одновременно напряжение снимается и с электродвигателя М2. Для восстановления цепи управления электродвигателем и подготовки его к последующему запуску необходимо рукоятку контроллера SA7 поставить в нулевое положение. После этого можно снова набирать рабочие позиции.
Электродвигателем Ml передвижения тележки (рис. 63) управляет контроллер S^45, замыкающий на 1-й позиции цепь катушки реверсивного магнитного пускателя КМ2.1 или КМ2.2, в зависимости от направления движения тележки. Для защиты электродвигателя Ml от перегрузок и коротких замыканий в силовую цепь включены три реле КА1, КА2, КАЗ с установкой на ток срабатывания 16 А, что превышает ток электродвигателя в три раза.
Построение и работа цепей управления электродвигателем передвижения тележки аналогичны электрической схеме механизма подъема. Ход тележки ограничивается двумя конечными выключателями SQ1 и SQ2, установленными в цепях катушек магнитного пускателя. При наезде на выключатель размыкаются его нормально замкнутые контакты, что приводит к отключению электродвигателя Ml и тормозного электромагнита YB1 от сети, грузовая тележка останавливается. Передвижение грузовой тележки в этом случае возможно только после установки рукоятки контроллера в нулевое положение и последующего набора рабочих позиций в направлении, обратном первоначальному движению тележки.
В схемах электроприводов грузовой тележки (рис. 62, 63) установлены переключатели (подъема и опускания) и 5Л6 (передвижения). Они предназначены для отключения системы собственного управления тележкой и переключения управления ею со второго крана. Это необходимо, например, для погрузки рельсовых звеньев двумя кранами.
Электродвигатели МЗ и М4 грузовой тележки крана ККС-10 (рис. 64) получают ускорение непосредственной коммутацией секций резисторов R3 и R4 кулачковыми контроллерами SA14 и SA15. Для обеспечения токовой защиты в силовых цепях применены четыре реле максимального тока КАИ, КА12, КА16, КА17 с магнитами, отрегулированными на трехкратную перегрузку в момент пуска.
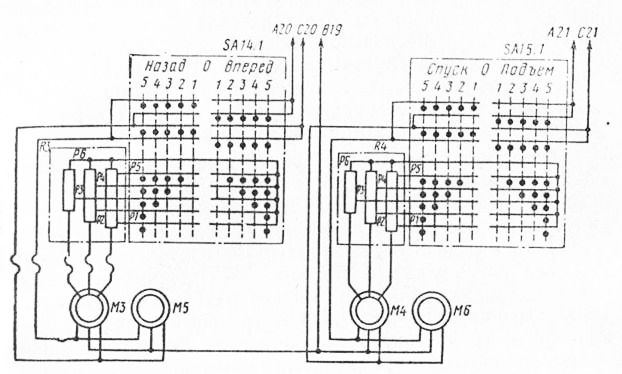
Рис. 64. Электрическая схема привода грузовой тележки крана ККС-10
Реверсируются двигатели рукояткой контроллера, на первых позициях которого происходит изменение включения фаз статорной обмотки. На вторых и последующих позициях отключены части пускового сопротивления, при этом двигатель развивает максимальную скорость. Рас-тормаживание происходит на первых позициях контроллера, когда гидротолкатель или магнит тормоза оказываются под напряжением.
Пусковые сопротивления крана ККС-10 имеют следующую разбивку по ступеням регулирования. Механизм подъема груза—ящик НФ-1А на ступенях: Р2—Р4 — 0,165 Ом, Р4—Р62 — 2,01 Ом, РЗ—Р6— 1,2 Ом, Р6— Р62 — 0,4 Ом, Р1—Р5 — 0,59 Ом; ящик НФ-11А: Р6— Р61—1,3 Ом, Р61—Р5 — 41 Ом. Механизм передвижения моста — два ящика НК-1А в каждом: PI—Р5 — 1,86 Ом, Р5—Р61— 12,0 Ом, Р61—Р6 — 6,0 Ом, РЗ— Р6— 4 Ом, Р2—Р4 — 0,323 Ом, Р4—Р62 — 6,28 Ом, Р62—Р6 — 1,204 Ом. Механизм передвижения тележки — ящик НФ-11А: PJ—P5— 1,66 Ом, Р5—Р6— 1,67 Ом, Р2—Р4 — 0,86 Ом, Р4—Р5 — 6,93 Ом, РЗ—Р6 — 3,7 Ом. После установки внутренних перемычек по рекомендуемой схеме цепи контроллера соединяют с клеммами резистора PI, Р2, РЗ, Р4.
Разбивка сопротивлений для других кранов приведена на их принципиальных электрических схемах и дается, как правило, в паспортной табличке контроллера.
Электропривод грузовых захватов. На кранах КК-5 и КПБ-10М предусмотрено использование набора сменных захватных приспособлений. В комплект крана обычно входят автостроп, моторный грейфер, электромагнит.
Электропривод грейфера представляет собой встроенную таль с тормозным электромагнитом и магнитным реверсивным пускателем. Катушками пускателя управляют с кнопочного пульта. Для ограничения натяжения каната встроенной тали в цепи катушек магнитного пускателя включены два конечных выключателя. Электропривод автостропа в одном из вариантов снабжен двигателем, для пуска которого применен магнитный реверсивный пускатель. Так же как и грейфером, электроприводом автостропа управляют с помощью переключателей кнопок.
Краны КПБ-10М оснащают набором захватных приспособлений непосредственно на заводе. Напряжение к захватам подается от клемм входного рубильника, а цепь управления получает пониженное напряжение от вторичной обмотки трансформатора. Силовая цепь защищена автоматическим выключателем QF1 (рис. 65), оборудованным электромагнитными расцепителями, которые отрегулированы на ток 40 А.
Для коммутации силовой цепи служит рубильник-переключатель SA10, разделяющий эту цепь на две взаимоисключающие цепи: цепь грузоподъемного электромагнита и цепь автостропа и грейфера.
В цепи электромагнита установлен магнитный пускатель КМ11, тиристорный преобразователь А2, вольтметр РV, панель магнитного контроллера A3 с командоконтрол-лером SA11 и контактором КМ 12. Эта цепь предназначена для выпрямления тока и подачи постоянного тока напряжением 220 В на клеммы грузового электромагнита.
Силовой цепью грузового электромагнита управляют с помощью кнопки SB4. При нажатии на эту кнопку включаются одновременно катушки КМ 11.1 и КМ 12.1 контактора КМ11, соединяющего цепь трехфазного тока с выпрямителем А2, и контактора КМ 12, замыкающего цепь выпрямленного тока грузового электромагнита. Для размыкания цепей питания выпрямителя и постоянного тока служит кнопка SB3.
Замыкание силовой цепи грейфера и автостропа осуществляется магнитным реверсивным пускателем КМ13.
Рис 65 Электрическая схема управления грузозахватным приспособлением крана КПБ-10М
Катушки этого пускателя КМ13.1.1 и КА1.3.2.1 включены в цепь, управляемую переключателем SA12
Для работы грейфера в цепях управления к штепсельным разъемам 71—70, 63—65 включаются цепи конечных выключателей грейфера, соответствующие положениям: челюсти сомкнуты и челюсти раскрыты. Переключатель SA13 ставится в положение «грейфер», что соответствует замкнутым контактам SА 13.3 и SА 13.4 и разомкнутым контактам 5А 13.1, SА 13.2 и SA13. Управление грейфером состоит в перемещении рукоятки разъединителя, который в левом положении замыкает цепь 8—71—70—7, включая катушку пускателя КМ13.1.1, а в правом — цепь 8—68— 67—63—65—66—7, включая катушку пускателя КМ 13.2.7 и изменяя направление вращения двигателя грейфера. Каждая из цепей размыкается конечными выключателями при достижении челюстями грейфера крайних положений.
Для работы автостропа рукоятка переключателя SA13 ставится в положение «автостроп», при этом контакты SА 13.3 и SА 13.4 размыкаются, а контакты SА 13.1 и SА 13.2, SА 13.5 и SA13.6 замыкаются. К штепсельному разъему цепей 63 — 65 присоединяется цепь соленоидов фиксации захватных крюков, а разъем цепей 71—70 ос-остается разомкнутым.
Управление поворотом автостропа осуществляется переключателем SA12. В левом положении переключателя включается катушка КМ 13.1.1 — автостроп поворачивается влево, в правом положении рукоятки с помощью реверсивного пускателя КМ13 поворот происходит в обратную сторону. Включение фиксирующих соленоидов осуществляется кнопкой SB5 при условии, если’ все четыре крюка автостропа вошли в зацепление с рымами контейнера.
При работе крана с захватом для леса используется схема грейфера.
Для подготовки крана к работе с магнитным подъемником необходимо: переключатель SA10, установленный на щите распределительного шкафа, поставить в положение «магнитный подъемник»; грузоподъемный электромагнит подвесить на грузовой крюк; соединить штепсельный разъем XS2—XS1, через который подается напряжение постоянного тока на магнитную плиту, и выключить автомат QF1. Цепь электромагнита подготовлена к работе.
Основное назначение крана КК-5 — погрузка и выгрузка контейнеров грузоподъемностью 3 и 5 т, поэтому в заводской сборке крана предусмотрено оснащение его двумя видами стропов. Электрическая схема автостропа выполнена таким образом, чтобы было возможно применить автостропы без переделки крана.
Схема управления автостропами (рис. 66) состоит из четырех локальных схем: А7—управления и токоподвода, ду—поворотной головки, А8 —автостропа КР-472 и дМ — автостропа ЦНИИ-ХИИТ. Устройства управления автостропами размещены на специальной панели на грузовой тележке крана, а кнопочные пульты управления SB 10, SB11, SB 12 и SB 13 выведены на кресельный пульт. В состав панели А7 входят два резистора R10 (ПГ13-43 на 10 Ом), R20 (ПЭВР-20 на 20 Ом), два выключателя QF1 и QF2 (АП50-ЗМ на 6,4 А), два реверсивных пускателя КМ 17 и КМ18 (ПМЕ-113 на 220 В), реле К9 (ПЭ-3 на 12 В), выпрямительный мост из четырех кремниевых диодов V37 — V40 (КД-202 В на ЗА) и стабилитрон кремниевый V41 (Д-815Д.А0.336—207). На поворотной головке автостропа размещается управляемый магнитным пускателем КМ 18 электродвигатель Ml (4А63А4 мощностью 0,37 кВт). Напряжение на электродвигатель Ml подается от грузовой тележки по кабелю, сматываемому по мере подъема груза на кабельный барабан. На поворотной головке устроен кольцевой токосъемник, от которого цепи подключаются к штепсельной колодке XS9 (ШР-48П9Э17 на 380 В), установленной на поворотной части головки вместе с Т-образным хвостовиком.
На автостропах (схема А8, А10) установлены электродвигатели перевода крюковых позиций: М2 (4A100L.6 мощностью 2,2 кВт) на автостропе КР-472; МЗ (АОЛ2.22.4 мощностью 1,5 кВт) на автостропе ЦНИИ-ХИИТ. Напряжение к приводу автостропов подается посредством разъема XS10 (ШР-48П9ЭШ7 на 380 В). Для контроля фиксации крюков на автостропе КР-472 имеются восемь датчиков, замыкающих зев крюка соленоидом катушек К1—К8 при механическом замыкании контакта герконами S^/—5Л5 (КЭМ-2А), а на автостропе ЦНИИ-ХИИТ — четыре конечных выключателя SQ1, SQ2, SQ3, SQ4 (ВПК-ПИ) по количеству систем крюков. Каждый датчик на автостропе КР-472 имеет свой штепсельный разъем ХР1—ХР8 (ШР-20ПК4), что удобно при замене датчика.
Управление автостропами сводится к нажатию кнопок SB10, SB12, повороту автостропа и кнопок SB11 и SB13, установке крюков автостропа на трех- или пятитонный контейнер. Наводка автостропа на контейнер осуществляется всеми движениями крана и зависит от навыка машиниста. Фиксирующая система работает автоматически — пока все датчики фиксаторов или конечные выключатели не замкнутся, не сработает реле К9, катушка которого включена в цепь выключателей напряжением 22 В. Контакт реле К9.3 замыкает цепь сигнальных ламп на кресле машиниста, а контакт К9.2 — блокирует датчик груза.
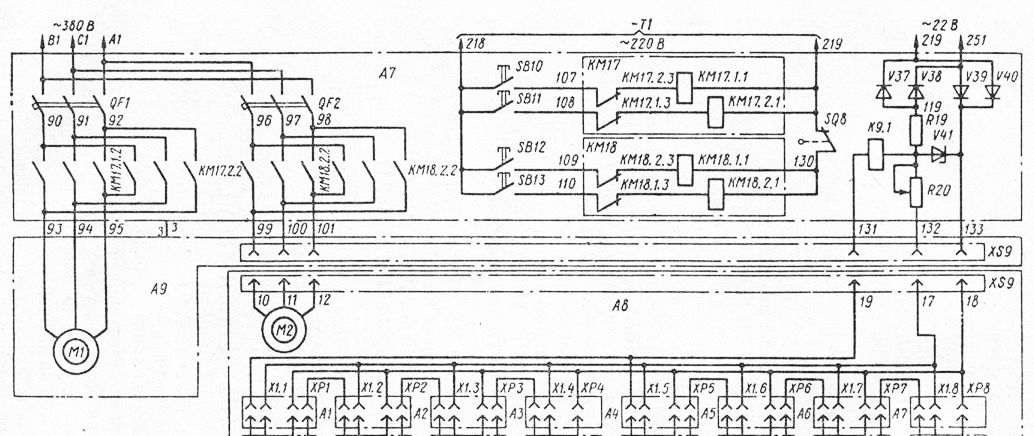
Рис. 66. Электрическая схема управления автостропами крана КК-5
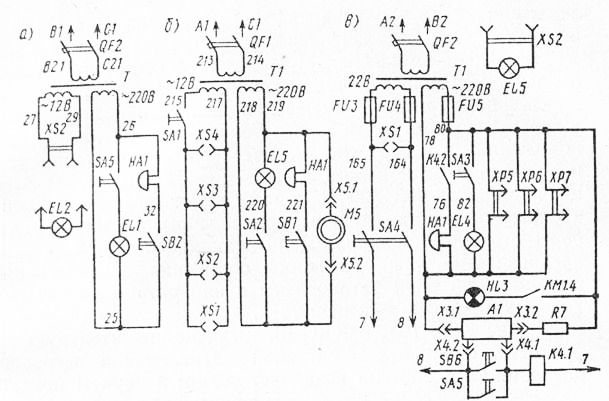
Рис. 67. Электрическая схема освещения и сигнализации кранов: а — ККТ-5; б — КК-5; е – КПБ-10М
Освещение и сигнализация. Кресельные пульты кранов имеют световую сигнализацию. Лампы загораются при движении крана и тележки вперед или назад, при подъеме и спуске груза, при зацеплении автостропа. Питание 220 В к сигнальным лампам подается от трансформатора Т 1,установленного в шкафу защитной панели. Цепи сигнализации и освещения (рис. 67) имеют для включения переносных ламп ремонтного освещения штепсельные разъемы, расположенные в местах систематического обслуживания кранов. Обычно цепи имеют напряжения 12 (22) и 220 В. К цепи напряжением 220 В присоединяют лампы освещения кабины машиниста, сигналы, вентиляторы, а иногда и приборы отопления кабины. Цепь напряжением 12 (22) В предназначена для ремонтного освещения. Штепсельные разъемы этой цепи установлены в аппаратном шкафу и у ходовых опорных тележек.
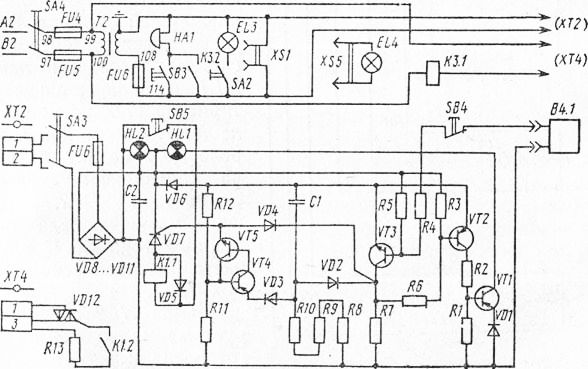
Рис. 68. Электрическая схема сигнализатора давления ветра СДМ в схеме сигнализации и освещения крана ККС-10
Краны КПБ-10М и ККС-10, имеющие значительную парусность, оборудованы системой сигнализации ветрового давления. Эта система позволяет светом и звуком предупреждать машиниста о необходимости остановки крана и закрепления его рельсовыми захватами. На рис. 68 приведена электрическая схема сигнализации с применением датчика давления ветра СДВ-М. При достижении силы ветра предельной величины замыкаются контакты микропереключателей датчика В4.1, срабатывает электронная система, загорается лампа HL1 и включается через тиристор VD7 катушка реле К1-1- Своим контактом реле К1.2 подает питание на управляющий контакт симмистора VD12, питающего катушку реле переменного тока КЗ-1. Включается электрический звонок НА1.
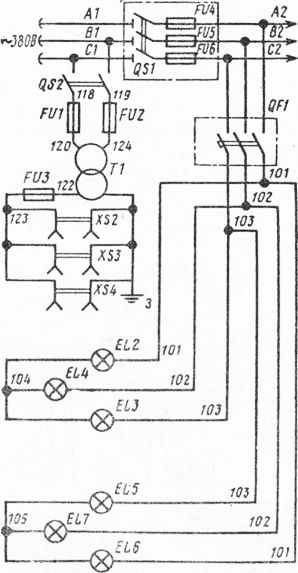
Рис. 69. Электрическая схема прожекторного освещения крана ККС-10
Цепи прожекторного освещения крана К.КС-10 (рис. 69) посредством автоматических выключателей АП-50 присоединяют непосредственно к входному напряжению трехфазного тока. При этом соединяются в звезду комплекты из трех ламп, что обеспечивает однофазное питание ламп с напряжением в каждой из них 220 В. В последних моделях кранов цепи прожекторного освещения присоединяют к трансформаторам напряжением 380/220 В —это упрощает разводку проводов по металлоконструкциям крана и делает работу прожекторов независимой друг от друга.
Цепи электронагревателей присоединяют непосредственно к вводным цепям трехфазного тока напряжением 380 В.
Рекламные предложения:
Главная → Справочник → Статьи → Форум
Механизация земляных работ
Механизация строительства
Механизация дорожных работ
Автоматизация строительства
→ Бетонные работы
→ Мини-тракторы
 Разделы
Разделы
Строительные машины и оборудование
→ Для специальных земляных работ
→ Дорожно-строительные машины
→ Строительное оборудование
→ Асфальтоукладчики и катки
→ Большегрузные машины
→ Строительные машины, часть 2,
→ Дорожные машины, часть 2
→ Ремонтные машины
→ Ковшовые машины
→ Автогрейдеры
→ Экскаваторы
→ Бульдозеры
→ Скреперы
→ Грейдеры
Эксплуатация строительных машин
→ Эксплуатация средств механизации
→ Эксплуатация погрузочных машин
→ Эксплуатация паровых машин
→ Эксплуатация экскаваторов
→ Эксплуатация подъемников
→ Эксплуатация кранов перегружателей
→ Эксплуатация кузовов машин
→ Крановщикам и стропальщикам
Ремонт строительных машин
Ремонт дорожных машин
Ремонт лесозаготовительных машин
Ремонт автомобилей КАмаЗ
Техническое обслуживание автомобилей
Очистка автомобилей при ремонте
Материалы и шины
Остались вопросы по теме:
"Принципиальные схемы козловых кранов"
— воспользуйтесь поиском.
→ Машины городского хозяйства
→ Естественная история машин
→ Транспортная психология
→ Пожарные автомобили
→ Автомобили-рефрижераторы
→ Монтаж и эксплуатация лифтов
→ Тракторы