Строй-Техника.ру
Строительные машины и оборудование, справочник
На карьерах добычи и транспортирования нерудных строительных материалов оператор земснаряда управляет процессом гидротранспорта, руководствуясь в основном показаниями двух контрольных приборов: по вакуумметру он следит за загрузкой всасывающей линии, по амперметру — за загрузкой напорной линии. Приборы контроля (консистометры и расходомеры) применяются лишь на отдельных установках и не получили широкого внедрения из-за недостаточной надежности. Сложность управления процессом по показаниям вакуумметра и амперметра обусловливается тем, что показания вакуумметра зависят от засоренности всасывающей трубы, а показания амперметра — от износа землесоса, наличия заиления в трубопроводах и ряда других факторов. Кроме того, в процессе производства намыва площадей под строительные объекты на ближних к земснаряду участках площади, где дальность транспортирования минимальна, имеют место большие подачи пульпы, при которых возможны кавитационные режимы; на дальних же участках, где длина трубопроводов максимальна, земснаряд работает с низкой производительностью, возможны режимы заиления трубопроводов и случаи их аварийной закупорки. В этих условиях показатели работы в большей мере определяет надежный контроль транспортного процесса.
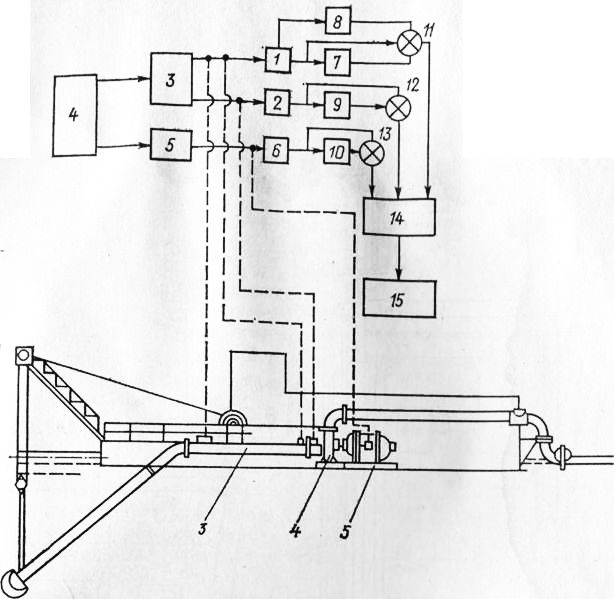
Рис. 1.22. Принципиальная схема устройства контроля процесса гидротрансп орта грунта земснарядами
Рекламные предложения на основе ваших интересов:
Дополнительные материалы по теме:
Исследования показали, что разработанные новые устройства защиты датчиков давления от засорения транспортируемым материалом, высокочувствительные гидростатические датчики давления и безынерционные датчики положения для устройств обратной связи позволяют создать эффективную систему автоматического контроля процесса гидротранспортирования грунта по трубопроводам.
В развитие указанных исследований создано устройство контроля. Это устройство (рис. 1.22) предназначено для автоматической выдачи оператору следующих сигналов: о работе в режиме высокой производительности; наличии засоренности всаса; возможном переходе в кавитационный режим; режиме заиления трубопроводов, а также сигнала для косвенного контроля концентрации пульпы.
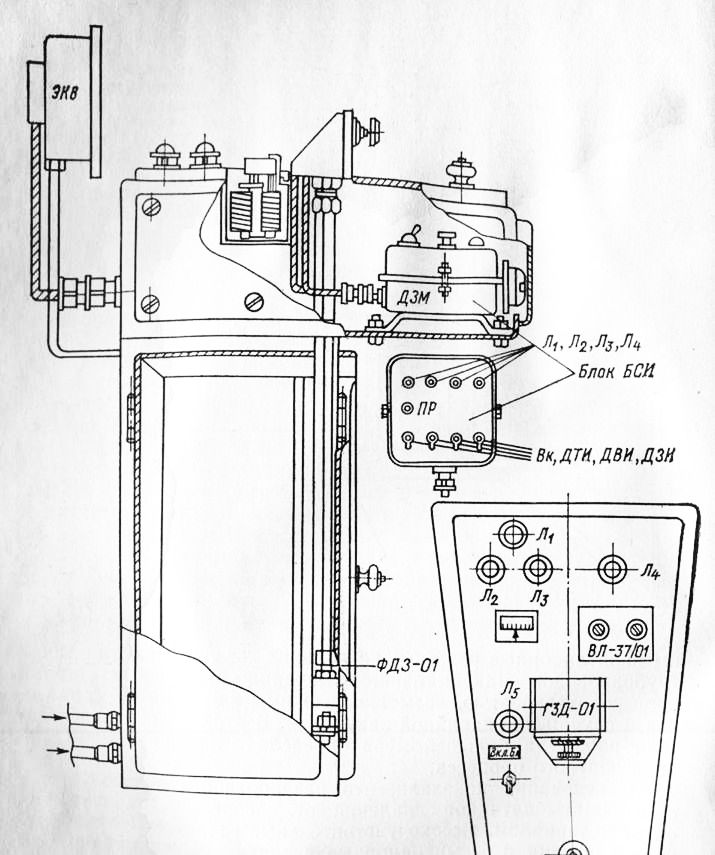
Рис. 1.23. Опытно-промышленный образец блока контроля процесса гидротранспорта грунта земснарядом
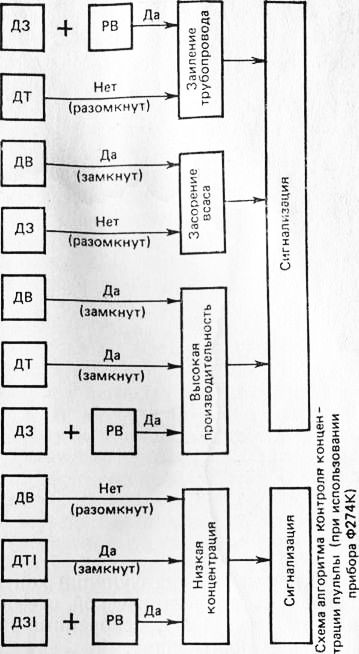
Рис. 1.24. Блок-схема алгоритма работы устройства контроля процесса гидротранспортирования
Все оборудование блока смонтировано в приборном шкафу, размеры и форма которого соответствуют шкафам пульта управления земснаряда 300-40М, для которого это устройство разработано. Сверху шкаф закрыт откидной крышкой панелью, на которой расположены лампы световой сигнализации и ключи управления.
Конструктивно устройство питания, релейный сумматор, электронный усилитель собраны в одном корпусе — закрытой металлической коробке со съемной верхней крышкой (блок БСИ и на рис. 1.23). На крышке автономного устройства БСИ смонтированы иммитаторы всей системы датчиков (в виде тумблеров ДТИ, ДВИ, ДЗИ и ламп Л] — Л4) и сигнальная аппаратура. Это автономное устройство с указанными тумблерами может моделировать (имитировать) действия как каждого датчика, так и алгоритма работы блока и использоваться для выявления отказов в работе датчиков.
Другим отдельным конструктивным узлом устройства контроля является гидростатический дифференциальный датчик давления ГЗД-01 с навешенным на нем фотокатодным задатчиком ФКЗ-01 (специально разработан институтом для рассматриваемого устройства). Схема указанного прибора показана на рис. 1.14. Гидростатическая часть датчика ГЗД-01 подключена резиновыми рукавами к двум контрольным сечениям горизонтального участка всасывающей трубы земснаряда, электрическая — к электронному усилителю.
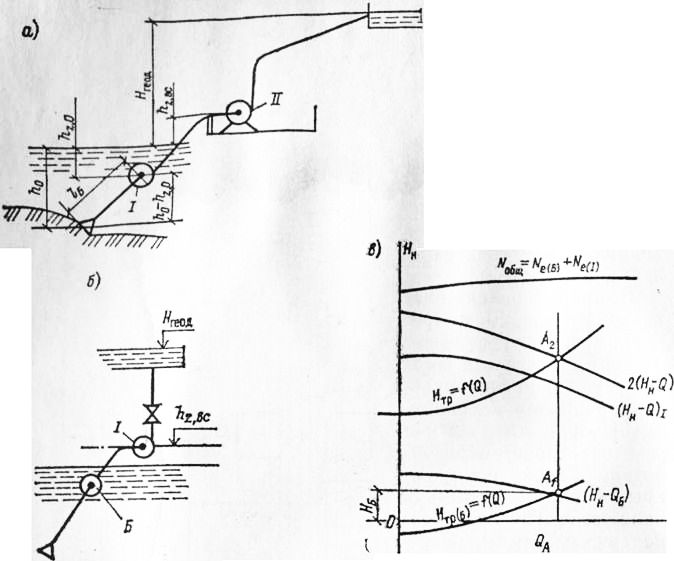
Рис. 1.25. К расчету оптимальных параметров погружных установок
а — схема к расчету оптимальной глубины погружения насоса; б — схема к расчету совместной работы погружного и палубного насосов; в — график совместной работы насосов при двухступенчатом трачспор-тировании гидросмеси
Для выполнения функций контроля режимов гидротранспортирования в электрической схеме блока заложены алгоритмы работы (рис. 1.24), основанные на приведенных ниже принципиальных положениях.
Наличие заиления в трубопроводах контролируется по величине перепада гидростатического давления на горизонтальном участке всасывающего трубопровода.
Целесообразность контроля заиления именно на указанном участке определяется тем, что в земснарядах диаметр всасывающего трубопровода, как правило, больше напорного, поэтому в нем быстрее осаживается материал. Сюда раньше всего поступает большая масса материала при обвалах забоя, и, с точки зрения быстродействия системы контроля и надежности работы, сигнал о начале заиления должен подаваться с этого участка.
При прохождении через контрольный участок вместе с пульпой крупных камней, больших комьев (пробок) материала возможно появление сигналов (импульсов) в гидростатическом датчике, вызываемых подскоком давления. Для исключения этих, так называемых «ложных», сигналов (сигналы роста перепада давления, вызванные заилением контрольного участка) вводится коррекция по длительности воздействия сигнала Она осуществляется с помощью датчика (реле) времени ВЛ-37/01, включенного в выходную цепь датчика перепада давления. Режим заиления является процессом определенной длительности, и сигнал о нем поступает, если длительность процесса отвечает времени, заданному настройкой указанного реле.
Принцип контроля высокой производительности основан на положении, что она имеет место при режиме всасывания пульпы, когда показания вакуумметра соответствуют докавитацион-ным величинам, а показания датчика токовой загрузки электродвигателя—величинам транспортирования пульпы, имеющей высокую концентрацию, которая при установившейся подаче (скорости движения) не вызывает заиления в процессе ее транспортирования по трубопроводам. Последний параметр при этом является ограничивающим, то есть корректирующим допустимую нагрузку. В соответствии с указанным положением построен алгоритм контроля — цепь II (рис. 1.24), состоящая из трех релейных линий, подключенных к сумматору-блоку управления: линии контроля загрузки всасывающей линии; линии контроля заиления; линии контроля загрузки электродвигателя, т. е. потребляемой мощности. В качестве датчика загрузки электродвигателя землесоса предусмотрен прибор Ф274К (выпускается Омским заводом Электроточприбор). По конструктивному оформлению —- это щитовой узкопрофильный прибор с линейным индикатором тлеющего разряда в качестве указателя отсчетного устройства. Прибор предназначен для измерения силы или напряжения постоянного тока и одновременного обеспечения трехпозиционного регулирования с выдачей выходных сигналов «Меньше», «Норма», «Больше».
Цепь контроля заиления собрана из двух релейных линий, подключенных к сумматору. Она состоит из гидростатического дифференциального датчика давления ГЗД-01 с задатчиком ФКЗ-01 (на схеме ДЗ-1), датчика (реле) времени, датчика силы тока (на схеме ДТ-1) и замыкается сигнальным устройством со звуковым и световым выходными сигналами.
Цепь контроля загрузки всасывающей линии и засорения всаса собрана из датчика-реле давления Д21С-11 или из серийного электроконтактного вакуумметра типа ЭКВ (на схеме ДВ) и из дифференциального датчика ГЗД-01. Цепь подключена к релейному сумматору и замыкается сигнальным устройством со звуковым и световым выходными сигналами.
Принцип контроля низкой концентрации заключается в следующем. При низкой концентрации, как известно, показания вакуумметра и амперметра приближаются к величинам, соответствующим процессу всасывания воды. Поскольку такие же величины могут наблюдаться и при режимах транспортирования, когда движение пульпы происходит в частично заиленном трубопроводе, то для исключения последнего фактора необходима коррекция по расходу пульпы (скорости ее движения).
в разработанном алгоритме для этой целя используется гидростатический датчик со вторым задатчиком ДЗ-1 и регулятор прибора Ф274К (на схеме ДТ-П). Учитывается, что при режиме низкой концентрации и незаиленном свободном трубопроводе показания этого датчика более высокие, чем при работе на воде.
Оборудование земснарядов блоками автоматического контроля процесса гидротранспорта грунта должно повысить их производительность, поскольку управление будет базироваться на сигнальных показаниях параметров, отражающих режим транспортирования. В дальнейшем при внедрении систем автоматического регулирования работы земснарядов блок автоматического контроля может войти составной частью в их структуру.
Рекламные предложения:
Главная → Справочник → Статьи → Форум
Механизация земляных работ
Механизация строительства
Механизация дорожных работ
Автоматизация строительства
→ Бетонные работы
→ Мини-тракторы
 Разделы
Разделы
Строительные машины и оборудование
→ Для специальных земляных работ
→ Дорожно-строительные машины
→ Строительное оборудование
→ Асфальтоукладчики и катки
→ Большегрузные машины
→ Строительные машины, часть 2,
→ Дорожные машины, часть 2
→ Ремонтные машины
→ Ковшовые машины
→ Автогрейдеры
→ Экскаваторы
→ Бульдозеры
→ Скреперы
→ Грейдеры
Эксплуатация строительных машин
→ Эксплуатация средств механизации
→ Эксплуатация погрузочных машин
→ Эксплуатация паровых машин
→ Эксплуатация экскаваторов
→ Эксплуатация подъемников
→ Эксплуатация кранов перегружателей
→ Эксплуатация кузовов машин
→ Крановщикам и стропальщикам
Ремонт строительных машин
Ремонт дорожных машин
Ремонт лесозаготовительных машин
Ремонт автомобилей КАмаЗ
Техническое обслуживание автомобилей
Очистка автомобилей при ремонте
Материалы и шины
Остались вопросы по теме:
"Устройство автоматического контроля процесса гидротранспорта нерудных материалов земснарядами"
— воспользуйтесь поиском.
→ Машины городского хозяйства
→ Естественная история машин
→ Транспортная психология
→ Пожарные автомобили
→ Автомобили-рефрижераторы
→ Монтаж и эксплуатация лифтов
→ Тракторы