Строй-Техника.ру
Строительные машины и оборудование, справочник
Введем ряд понятий, которыми будем пользоваться в дальнейшем.
Объем, обслуживаемый манипулятором, или обслуживаемый объем — заданное множество точек пространства, в которых манипулятор выполняет заданные функции.
Рабочий объем манипулятора — объем, в котором двигаются звенья манипулятора при выполнении функциональных задач в обслуживаемом объеме.
Рекламные предложения на основе ваших интересов:
Дополнительные материалы по теме:
Обслуживаемая зона — множество точек базовой плоскости, образованной движением плеча и предплечья, в которой располагается центр захвата при выполнении функциональных задач в обслуживаемом объеме.
Рабочая зона манипулятора — площадь в базовой плоскости, в которой двигаются звенья манипулятора при выполнении рабочих операций в обслуживаемом объеме.
Под манипулятором обычно понимают техническое устройство, предназначенное для воспроизведения некоторых двигательных функций верхних конечностей человека. Будем считать, что объем движений человека представляет собой множество точек пространства, в которое кисти человека могут попасть при условии, что человек не сходит с места (ступни ног неподвижны). Тогда движение человека приблизительно можно разделить на три группы. К первой группе относятся глобальные движения, объем которых намного больше объема движений человека. Эти движения осуществляются с помощью нижних конечностей человека. Вторую группу составляют региональные движения; их объем соизмерим с объемом движений человека. Региональные движения выполняются в основном крупными суставами верхних конечностей человека. Наконец, к третьей группе относятся локальные движения, объем которых мал по сравнению с объемом движений человека. Эти движения выполняются с помощью кистей рук. По аналогии с этим можно ввести понятия глобальных, региональных и локальных движений и для манипуляторов.
В таком случае к глобальным движениям следует отнести перемещение манипулятора в пространстве с помощью двигательной системы, например перемещение манипулятора с электрокаром, на котором он установлен. В некоторых типах манипулятора глобальные движения могут отсутствовать, например в случае стационарного манипулятора.
К региональным движениям манипулятора можно отнести те движения, которые изменяют положение захвата или груза в пространстве, а к локальным — те, которые изменяют ориентацию груза или захвата. Введенные выше понятия обслуживаемого объема относятся к региональным и локальным движениям, когда носитель манипулятора неподвижен.
Кинематические схемы манипуляторов делятся на две группы. В первой группе используется принцип упорядоченного расположения звеньев и кинематических пар,, причем всегда имеется, по крайней мере, одна пара кинематически связанных звеньев,_ обеспечивающая перенос рабочего органа в базовой плоскости. Использование еще одной степени подвижности кинематической схемы обеспечивает движение базовой плоскости в пространстве и образование обслуживаемого объема. Во второй группе кинематических схем используется произвольное расположение звеньев и кинематических пар, при этом движение, например в плоскости, может быть организовано использованием совместной работы не менее трех кинематических пар. При этом законы движения звеньев (даже при простых законах движения рабочего органа) оказываются очень сложными, поэтому эта группа кинематических схем получила наименьшее распространение.
На рис. 1 изображена кинематическая схема манипулятора, движение в базовой плоскости которого обеспечивается двумя шарнирно-сочлененными звеньями, плечом и предплечьем. Выполняя, например, вращение схемы вокруг оси Y, получим круговой обслуживаемый объем. Если же кинематической схеме обеспечено продольное движение вдоль оси Z, то получим обслуживаемый объем в виде параллелепипеда при обслуживаемой зоне прямоугольной формы, характерной для погрузочных манипуляторов. Схема манипулятора является антропоморфной и ее преимущественное применение объясняется традицией и рядом конструктивных достоинств. В работе указывается, что вид кинематической схемы задающего устройства должен быть определенным образом связан с видом кинематической схемы руки человека, что и предопределяет применение для копирующих манипуляторов кинематических схем, содержащих в основном вращательные пары. Из-за конструктивных трудностей, связанных с получением достаточно больших перемещений (больше 0,5 м) поступательных пар, они находят ограниченное применение в манипуляторах. При разработке копирующих манипуляторов возникают трудности с созданием кинематически подобных управляющих механизмов с высокой чувствительностью.
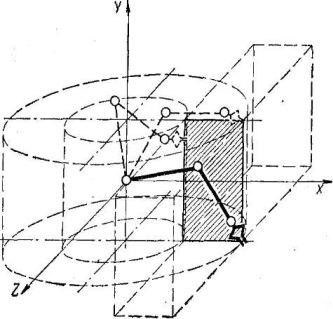
Рис. 1. Обслуживаемые объемы манипуляторов
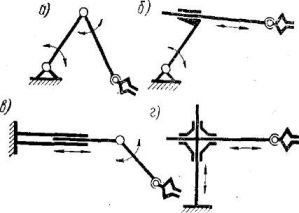
Рис. 2. Кинематические схемы манипуляторов для получения движения в базовой плоскости
Антропоморфная кинематическая схема манипулятора не является единственным вариантом. Как указывалось ранее, для получения движения в базовой плоскости минималь-
ное число кинематических пар равно двум. На рис. 2. изображены схемы манипуляторов для получения движения в базовой плоскости, содержащие соответственно две вращательные пары (а), вращательную и поступательную пару (б), поступательную и вращательную пару (в) и две поступательные пары (г). Осуществляя поворот этих схем с помощью вращательной пары, получим круговые обслуживаемые объемы, а обеспечив движение этих схем, например в плоскости перпендикулярной базовой плоскости, получим протяженный обслуживаемый объем, имеющий в сечении перпендикулярном направлению переноса форму обслуживаемой зоны. Наличие указанных трех кинематических пар позволяет осуществить перенос рабочего органа в пространстве. Однако с целью обеспечения заданной ориентации рабочего органа манипулятор должен быть оснащен еще добавочными звеньями с приводами. Общее число степеней подвижности кинематической схемы манипулятора (в этом случае для произвольной ориентации предметов) должно быть равно шести. Однако, если ради простоты используется раздельное управление каждым приводом, то шести степеней подвижности оказывается уже недостаточным для выполнения рабочих операций с предметами, связанными кинематически с неподвижными объектами. Поясним это на простейшем примере. Для того чтобы поднять и повернуть ящик письменного стола для его установки в направляющие, достаточно иметь манипулятор с шестью степенями подвижности. Однако без седьмого движения, в данном случае поступательно-прямолинейного, нельзя было бы вдвинуть ящик в стол иначе, как используя одновременно сложную комбинацию шести движений.
В то же время практикой установлено, что мысленная координация трех одновременно производимых движений является верхним пределом возможности человека. В связи с этим создание погрузочных манипуляторов с совмещенным управлением и с визуальной обратной связью является на сегодняшний день единственным способом, позволяющим эффективно использовать ма-нипуляционные устройства для выполнения различных технологических операций.
Анализ конструкций промышленных манипуляторов показывает, что в действительности и уменьшенное число степеней подвижности манипулятора позволяет эффективно выполнять рабочие операции, не усложняя конструкцию манипулятора.
Действительно промышленные манипуляторы работают в организованном пространстве, где рабочие плоскости строго упорядочены и, как правило, лежат в горизонтальной и вертикальной плоскостях. В этом случае достаточно обеспечить качание рабочего органа и его ротацию, чтобы можно было выполнить операцию штабелирования грузов.
Очевидно, что движение в базовой плоскости можно получить и большим числом кинематических пар, выполняя, например, одно из звеньев кинематической схемы переменной длины, т. е. снабдив механизм еще одной поступательной парой или шарнирно присоединив добавочное звено. В этом случае одну и ту же траекторию оси кистевого шарнира можно получить бесконечным множеством сочетаний различных законов движения звеньев. Например, в простейшем случае из работы могут поочередно отключаться те или иные приводы звеньев. В связи с этим рассмотрим понятие маневренности манипулятора. Под маневренностью манипулятора понимается степень подвижности его кинематической схемы при жестком соединении губок захвата с неподвижным предметом. На рис. 4 и 5 изображены кинематические манипуляторы, у которых захваты зажимают неподвижные объекты. Легко убедиться, что кинематическая схема манипулятора потеряла всякую подвижность и превратилась в ферму, а кинематическая схема имеет возможность менять свою конфигурацию благодаря применению предплечья переменной длины. Представляется целесообразным ввести понятие
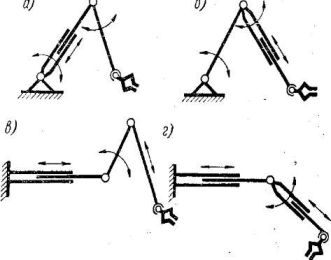
Рис. 3. Кинематические схемы манипуляторов с базовой маневренностью
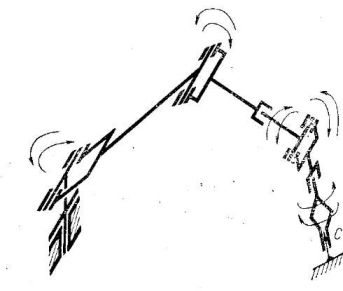
Рис. 4. Кинематическая схема манипулятора
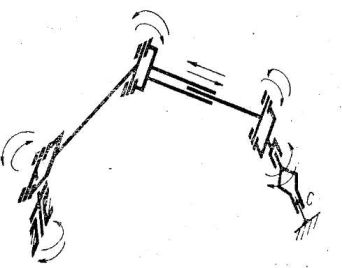
Рис. 5. Кинематическая схема манипулятора
При этом учитываются только те кинематические пары, оси которых могут занимать положение перпендикулярное базовой плоскости для шарниров или лежать в плоскости параллельной ей для поступательных пар.
Воспользовавшись этой формулой, можно установить, что кинематические схемы рис. 2 и 4 обладают нулевой базовой маневренностью, а кинематические схемы рис. 3 и 5 — базовой маневренностью, равной единице. Для определения маневренности манипулятора в целом воспользуемся формулой Озола для пространственных одноконтурных механизмов
По этой формуле можно установить, что маневренность манипулятора равна нулю. Однако при определении маневренности манипулятора также получается, что он обладает нулевой маневренностью, но как было установлено выше, этот манипулятор обладает базовой маневренностью, равной единице.
Понятие маневренности манипулятора введено для случая взаимодействия манипулятора с предметами, связанными с неподвижными объектами. Представляет интерес рассмотреть вопрос и о траекторной маневренности.
Траекторная маневренность показывает, что за счет степеней подвижности, например рабочего органа, на определенном участке траектории она может определяться изменением закона движения не только базовых звеньев, но и самого рабочего органа. Причем, если контролируется положение только центра губок схвата, то фактическая траекторная маневренность для кинематической схемы равна двум. Если же контролируется положение какой-либо точки предмета, не совпадающей с точкой С, то траекторная маневренность равна трем. Траекторная маневренность равна трем и в том случае, если ось губок захвата не совпадает с осью кисти.
Повышение числа степеней маневренности манипуляторов позволяет выполнять достаточно сложное движение в ограниченных рабочих объемах и при наличии препятствий в обслуживаемых объемах, решать задачи уменьшения энергозатрат за счет выбора оптимальных законов движения, а также повышает надежность системы, так как при выходе из строя, например, одного из приводов, возможно частичное выполнение задач.
Рекламные предложения:
Главная → Справочник → Статьи → Форум
Механизация земляных работ
Механизация строительства
Механизация дорожных работ
Автоматизация строительства
→ Бетонные работы
→ Мини-тракторы
 Разделы
Разделы
Строительные машины и оборудование
→ Для специальных земляных работ
→ Дорожно-строительные машины
→ Строительное оборудование
→ Асфальтоукладчики и катки
→ Большегрузные машины
→ Строительные машины, часть 2,
→ Дорожные машины, часть 2
→ Ремонтные машины
→ Ковшовые машины
→ Автогрейдеры
→ Экскаваторы
→ Бульдозеры
→ Скреперы
→ Грейдеры
Эксплуатация строительных машин
→ Эксплуатация средств механизации
→ Эксплуатация погрузочных машин
→ Эксплуатация паровых машин
→ Эксплуатация экскаваторов
→ Эксплуатация подъемников
→ Эксплуатация кранов перегружателей
→ Эксплуатация кузовов машин
→ Крановщикам и стропальщикам
Ремонт строительных машин
Ремонт дорожных машин
Ремонт лесозаготовительных машин
Ремонт автомобилей КАмаЗ
Техническое обслуживание автомобилей
Очистка автомобилей при ремонте
Материалы и шины
Остались вопросы по теме:
"Кинематические схемы манипуляторов"
— воспользуйтесь поиском.
→ Машины городского хозяйства
→ Естественная история машин
→ Транспортная психология
→ Пожарные автомобили
→ Автомобили-рефрижераторы
→ Монтаж и эксплуатация лифтов
→ Тракторы