Строй-Техника.ру
Строительные машины и оборудование, справочник
Для того чтобы привести в действие какой-либо механизм экскаватора, например барабаны главной лебедки, поворотный механизм платформы, механизм передвижения и т.д., необходимо включить различные муфты. Для включения таких муфт требуется приложить усилия, иногда большие по величине а, в некоторых случаях незначительные. Для этого на экскаваторах используют различные механизмы управления, которые бывают рычажно-механическими, пневматическими и гидравлическими. Они должны обеспечивать плавное включение механизмов экскаватора, надежность действия, независимость от климатических условий и времени года, быть простыми в обслуживании и не требовать частых регулировок.
У экскаваторов с механическим приводом могут применяться рычажно-механические, пневматические и гидравлические системы управления. У гидравлических экскаваторов имеется только гидравлическое управление.
Имеется еще один вид сменного рабочего оборудования одноковшовых гидравлических экскаваторов, расширяющий его функциональные возможности — ковш погрузчика, предназначенный для работы с предварительно взрыхленным грунтом или другими насыпными материалами, вместимость которого увеличена по сравнению с ковшом прямой лопаты в 1,5…2 раза. Производительность экскаватора с ковшом погрузчика значительно больше, чем при работе с ковшом прямой лопаты.
Рекламные предложения на основе ваших интересов:
Дополнительные материалы по теме:
Для крепления ковша погрузчика используется нижняя часть составной стрелы рабочего оборудования обратной лопаты и гидроцилиндры этого оборудования. Ковш погрузчика с помощью тяг подвешивается к оголовку стрелы и приводится в движение гидроцилиндром. Другие гидроцилиндры перемещают стрелу и тяги подвески ковша.
При работе» ковш погрузчика перемещается в ту же сторону, что и ковш прямой лопаты, но параллелограммная схема его крепления позволяет обеспечивать прямолинейное движение режущей кромки. Гидроцилиндр, расположенный на ковше, создает необходимьш при загрузке и выгрузке поворот ковша в продольной плоскости.
Гидравлические одноковшовые экскаваторы также могут оснащаться различными захватами для погрузки штучных грузов (трубы, бревна, ящики), шнековым буром для рытья небольших колодцев, бульдозерным отвалом для засыпки ям и траншей, рыхлителем для рыхления грунтов и корчевания пней.
Функциональные возможности экскаваторов с механическим приводом (канатные) могут быть расширены путем установки на них копрового оборудования для забивки свай и клин-бабы для разработки мерзлых грунтов, разрушения сносимых сооружений и т. п.
—
Системы управления землеройных машин должны обеспечивать безотказность и быстроту приведения в действие рабочих органов, плавность их включения и выключения, безопасность и удобство работы машиниста. Системы управления состоят из приборов и устройств, позволяющих контролировать работу привода и воздействовать на него в соответствии с выполняемым рабочим процессом.
Фрикционные муфты служат для отключения двигателя от трансмиссии и осуществления различных переключений. Они чаще всего передают крутящий момент за счет прижатия трущихся дисков в осевом направлении. Их используют также для включения механизмов и в качестве предохранительных устройств, когда рабочий орган экскаваторов встречается с труднопреодолимым препятствием и необходимо ограничить крутящий момент, возникающий при остановке рабочего органа.
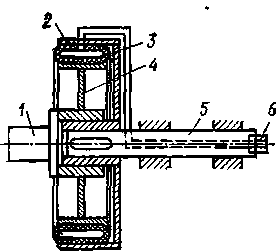
В последнее время получили применение пневмошинные фрикционные муфты, передающие крутящий момент прижатием кольцевой поверхности в радиальном направлении. На вращающемся валу установлен шкив, внутри которого закреплена пневматическая шина. При подаче воздуха под давлением через вращающееся соединение 6 диаметр шины увеличивается и ее колодки соприкасаются со шкивом, приводя во вращение вал.
Тормоза используют для остановки машин, а также других механизмов. Принцип действия тормоза заключается в том, что к шкиву или диску, соединенному с валом, прижимается лента (или колодки), которая за счет трения его останавливает. Применяют ленточные, колодочные и пневмошинные тормоза. Пневмошинные тормоза по устройству аналогичны описанной выше пневмошинной муфте с той разницей, что шкив у них закреплен не на валу, а на раме машины и при подаче воздуха в пневмомашину вал останавливается.
Наиболее часто применяют ленточные тормоза. На валу установлен тормозной шкив, который огибает тормозная лента. Лента соединена с одним концом двуплечего рычага, шарнирно закрепленного на опоре. Другой конец рычага соединен с шарнирным механизмом, состоящим из серег. Нажимая ногой на педаль, машинист поворачивает ее относительно опоры и штанга движется в направлении стрелки, перемещая серьги и рычаг, тормозная лента затягивается и затормаживает вал. Когда машинист отпускает педаль, пружина возвращает систему в исходное положение и вал освобождается. Описанная тормозная система называется нормально разомкнутой, так как тормоз все время разомкнут и замыкается только действием машиниста.
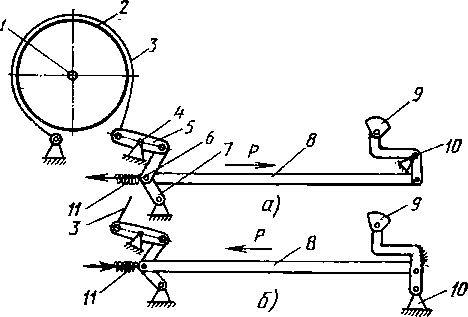
Если необходимо, чтобы тормоз был постоянно замкнут и размыкался только действием машиниста, применяют нормально замкнутые тормоза. Такие тормоза используют в качестве стояночных или аварийных (например, при потере управления машиной). Тормозная лента постоянно замкнута под действием пружины. Чтобы освободить тормоз, нажимают на педаль, при этом штанга сжимает пружину и лента размыкается. Когда прекращают нажимать на педаль, система возвращается в замкнутое состояние.
В зависимости от характера использования мускульной энергии машиниста системы управления могут быть непосредственного действия или с усилителями (системы с сервоприводом). Системы управления непосредственного действия могут быть механическими (усилие руки или ноги машиниста передается исполнительному органу с помощью системы рычагов и тяг) и гидравлическими (усилие передается рабочей жидкостью). Усилия машиниста для перевода рычагов и педалей не должны превышать допустимых.
Системы управления с усилителями облегчают труд машинистов. В необходимых случаях используют системы следящего действия, в которых нагрузка на органах управления пропорциональна нагрузке на исполнительном органе.
При автоматизации управления роль машиниста сводится к настройке системы на определенную программу управления и контроля за рабочим процессом машины. Так, на экскаваторах-дреноукладчиках устанавливают автоматизированные системы управления укладки дрен по заданному уклону, в траншейных и канальных экскаваторах предусматривают возможность регулирования скорости передвижения в зависимости от нагрузки, действующей на рабочие органы, и благодаря этому обеспечивают полную загрузку двигателя независимо от характера грунтов, на которых работает машина.
Рекламные предложения:
Главная → Справочник → Статьи → Форум
Механизация земляных работ
Механизация строительства
Механизация дорожных работ
Автоматизация строительства
→ Бетонные работы
→ Мини-тракторы
 Разделы
Разделы
Строительные машины и оборудование
→ Для специальных земляных работ
→ Дорожно-строительные машины
→ Строительное оборудование
→ Асфальтоукладчики и катки
→ Большегрузные машины
→ Строительные машины, часть 2,
→ Дорожные машины, часть 2
→ Ремонтные машины
→ Ковшовые машины
→ Автогрейдеры
→ Экскаваторы
→ Бульдозеры
→ Скреперы
→ Грейдеры
Эксплуатация строительных машин
→ Эксплуатация средств механизации
→ Эксплуатация погрузочных машин
→ Эксплуатация паровых машин
→ Эксплуатация экскаваторов
→ Эксплуатация подъемников
→ Эксплуатация кранов перегружателей
→ Эксплуатация кузовов машин
→ Крановщикам и стропальщикам
Ремонт строительных машин
Ремонт дорожных машин
Ремонт лесозаготовительных машин
Ремонт автомобилей КАмаЗ
Техническое обслуживание автомобилей
Очистка автомобилей при ремонте
Материалы и шины
Остались вопросы по теме:
"Системы управления экскаваторов"
— воспользуйтесь поиском.
→ Машины городского хозяйства
→ Естественная история машин
→ Транспортная психология
→ Пожарные автомобили
→ Автомобили-рефрижераторы
→ Монтаж и эксплуатация лифтов
→ Тракторы