Строй-Техника.ру
Строительные машины и оборудование, справочник
Маневренность автопоезда характеризует его способность к изменению направления движения на ограниченных площадях.
Этим качеством определяются возможности безопасного проезда автопоездов на автомобильных дорогах с ограниченной шириной полосы движения, на городских улицах, в автомобильных парках, портах, на строительных площадках, территориях складов и мест разгрузки. Хорошая маневренность улучшает удобство проведения погрузочно-выгрузочных работ и уменьшает трудозатраты на их выполнение. К тому же при недостаточной маневренности может быть затрудненным или вовсе невозможным преодоление автопоездом стесненных участков дорог, например лесных, проселочных, горных и др.
Таким образом, от параметров маневренности зависят безопасность движения, производительность и проходимость автопоезда.
Рекламные предложения на основе ваших интересов:
Дополнительные материалы по теме:
Маневренность охватывает сравнительно небольшую часть параметров, оценивающих более широкое качество —управляемость автопоезда, и именно те параметры, которые определяются при небольших скоростях движения.
Такой подход к оценке управляемости автопоездов вполне закономерен, если учесть, что скорость движения автопоездов значительно меньше скоростей одиночных автомобилей. Более полно оценить управляемость автопоезда возможно, очевидно, на базе измерителей, применяемых для оценки управляемости автомобиля, однако для автопоездов аналогичные измерители пока не разработаны.
Главное и существенное отличие криволинейного движения автопоезда от движения одиночного автомобиля заключается в уширении площади или полосы, необходимой для поворота. Эта особенность характерна и для неустановившегося криволинейного движения, в котором точки автомобиля или автопоезда движутся по кривым переменного радиуса, и для установившегося движения,-в. котором и автомобиль и прицеп (полуприцеп) поворачиваются вокруг единого Центра. В последнем случае траектории всех, точек автомобиля-тягача и прицепного звена представляют собой, дуги, окружностей.
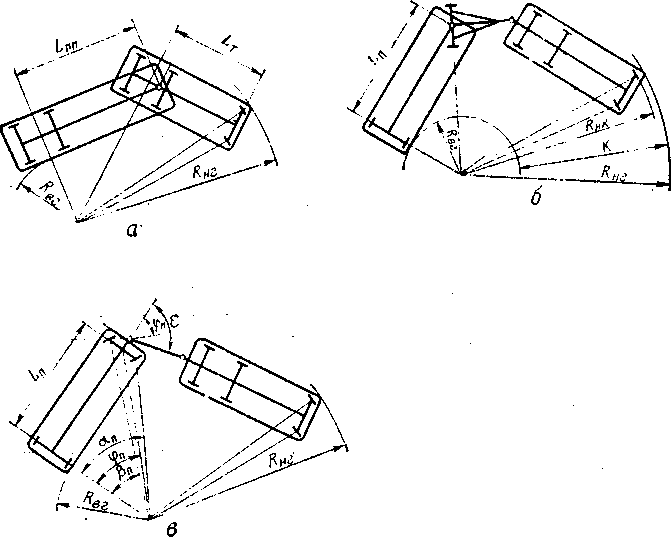
Рис. 1. Схемы кругового движения седельного тягача с полуприцепом (а); тягача с прицепом, имеющим поворотное устройство типа «поворотный круг» (б), и тягача с прицепом, управляемым рулевой трапецией (в)
На рис. 1 изображены схемы кругового движения седельного и прицепных автопоездов.
Наружный габаритный радиус поворота определяет общую площадь, необходимую для кругового движения, и (приближенно) ширину полосы, требующуюся для изменения направления движения автопоезда на 180°. Его величину поэтому желательно иметь как можно меньшей.
По этой же причине при оценке маневренности автопоезда перечисленные параметры определяются при максимальных углах поворота управляемых колес.
Известно, что вход тягача автопоезда в поворот (криволинейное движение с увеличением угла поворота управляемых колес) сопровождается смещением прицепного звена в сторону мгновенного центра поворота и увеличением полосы движения автопоезда. При постоянном /?„к это смещение постепенно стабилизируется и по прошествии тягачом некоторого пути становится постоянным. Длина дуги с наименьшим постоянным радиусом, которую проходит тягач до начала установившегося движения автопоезда, увеличивается по мере уменьшения радиуса поворота и увеличения базы прицепного звена. В некоторых случаях, о которых будет сказано особо, установившееся движение автопоезда при минимальном радиусе поворота вообще не наступает.
Круговое движение автопоезда с минимальным Rim (если оно имеет место) является, таким образом, предельным случаем криволинейного движения, а соответствующий ему габаритный коридор имеет наибольшее значение.
Для практических целей габаритный коридор автопоезда может быть определен экспериментальным путем.
На рис. 1 показаны схемы кругового движения автопоездов, наиболее часто используемых с полноприводными тягачами:
— седельного тягача с полуприцепом с неуправляемыми колесами;
— автомобиля-тягача с прицепом, управляемым поворотной тележкой;
— автомобиля-тягача с прицепом, управляемым рулевой трапецией.
На прицепах с поворотной тележкой последняя вместе с колесной осью шарнирно (с помощью особого подшипника большого размера — поворотного круга) прикрепляется к раме. При повороте дышла прицепа происходит поворот передней оси. Такие поворотные устройства отличаются простотой, надежностью, обеспечивают обычно большие углы поворота тележки относительно, рамы. Важным свойством прицепов с поворотными устройствами этого типа является высокая устойчивость прямолинейного движения (против периодических поперечных отклонений),.
Недостатками их являются, как правило, большая величина поперечных смещений к центру поворота при маневрировании, что уменьшает /?вг автопоезда, и большая монтажная высота рамы. Последний недостаток обусловлен необходимостью размещения поворотной тележки под рамой прицепа. Раму прицепа при этом делают ступенчатой формы или увеличивают монтажную высоту в целом.
Поворотные устройства прицепов с рулевой трапецией представляют систему рычагов и тяг, связывающих дышло с управляемыми колесами. Конечным элементом этого привода является рулевая (разрезная или неразрезная) трапеция. Благодаря этому привод обеспечивает поворот колес на разные углы, что при неповоротной оси необходимо для кинематического (чистого) качения колес без бокового скольжения. Поворотные устройства этого типа применяются на прицепах CM3-8325 (CM3-8326), 782Б, ЧМЗАП-8386. Благодаря тому что в этом случае оси колес остаются неповернутыми в плане относительно рамы, углы поворота колес обычно ограничены. Однако при этом удается разместить раму между колесами, а это существенно уменьшает монтажную высоту ее и создает благоприятные условия для размещения на Heii различного оборудования (см. схему прицепа-шасси CM3-8326 в разд. 3). Из-за малой монтажной высоты рамы прицепы этого типа в технической литературе иногда называются низкорамными.
Другим достоинством таких поворотных устройств является возможность улучшения маневренности автопоезда за счет уменьшения смещения прицепа относительно основной траектории тягача при криволинейном движении.
Для прицепов с поворотными тележками t=l. Для прицепов с колесами, управляемыми рулевой трапецией, обычно »>1. Так, для схемы рис. 26,в передаточное число рулевого привода i»l,5. Для современных прицепов с управляемыми колесами передаточные числа составляют: 1,2 — у прицепа CM3-8325 (CM3-8326); 1,3 — у прицепа 782Б и 1,5 — у прицепа ЧМЗАП-8386.
Сравнение схем рис. 1, б и 1, в показывает, что во втором случае центр передней оси прицепа описывает траекторию значительно большего радиуса, чем у прицепа с поворотной тележкой. При этом соответственно уменьшаются смещение центра задней оси относительно основной траектории и габаритный коридор автопоезда в целом. Принципиально можно рассчитать передаточное число привода, при котором задние колеса прицепа будут следовать по колее задних колес тягача (при одинаковой ширине колеи тех и других колес), что имеет важное значение с точки зрения обеспечения проходимости автопоезда при повороте на мягких грунтах. Такое передаточное число для конкретного прицепа будет зависеть от геометрических размеров прицепа. Однако, как показывают расчеты, для этого случая передаточное число привода управления реальных прицепов должно быть очень большим (2,5—3). При таких величинах i обычно резко ухудшается устойчивость прямолинейного движения (виляния прицепов достигают недопустимой величины). Кроме того, из-за несовпадения линии действия усилия, передаваемого дышлом, и направления качения колес при 1>1 на колеса всегда действует боковая сила, пропорциональная sin (i—1) • <рп. При больших значениях передаточных отношений и углов поворота колес на скользких дорогах это усилие превышает предельную величину по сцеплению и происходит стаскивание передней оси прицепа вбок. Кинематика поворота прицепа при этом нарушается, в неблагоприятных условиях возможны поломки рулевого привода и аварии прицепов.
По указанным причинам на современных прицепах схемы управления, обеспечивающие следование задних колес прицепа по колее задних колес тягача, распространения не получили.
Габаритный коридор автопоезда может быть и вычислен приближенно, если известна минимальная величина габаритного радиуса поворота тягача Rur и геометрическая характеристика тягача и прицепа.
Однако габаритный коридор автопоезда как измеритель маневренности имеет ряд недостатков.
Во-первых, при большой величине Lna и Ап автопоезд установившегося движения не имеет, а центр тележки полуприцепа описывает в плане кривую, изображенную на рис. 2, т. е. этот параметр не имеет смысла.
Во-вторых, он обладает известной противоречивостью. Действительно, маневренность одиночного автомобиля и автопоезда, с одной стороны, тем лучше, чем меньше его внешний габаритный радиус поворота. С другой стороны, для конкретного транспортного средства по мере уменьшения радиуса поворота габаритный коридор автопоезда увеличивается, что свидетельствует об ухудшении качества маневренности.
В-третьих, габаритный коридор, как параметр, не позволяет сравнивать между собой автопоезда (и автомобили) по маневренности. Причина заключается в том, что минимальные радиусы поворота для автомобилей (тягачей) различны. И может иметь место случай, когда минимальный радиус поворота одного автомобиля меньше, а габаритный коридор больше, чем у другого автомобиля. При этом невозможно определить, какой из автомобилей имеет лучшую маневренность,
Кроме того, следует заметить, что неустановившееся движение является типичным случаем криволинейного движения автопоезда и должен существовать измеритель, оценивающий качество этого движения.
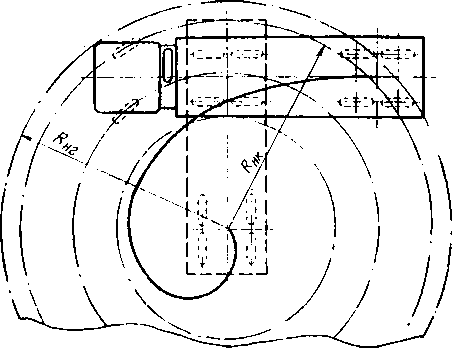
Рис. 2. Поворот трехосного седельного тягача КамАЗ-4410 с полуприцепом ОдАЗ-9350 (inn = 7,8 м)
Таким измерителем может быть показатель маневренности автопоезда (автомобиля) при изменении направления его движения на 90° с минимальным радиусом.
Методика его определения заключается в следующем:
— на ровной площадке с хорошим покрытием дороги (например, асфальтобетонным) автопоезд устанавливается в положение, соответствующее прямолинейному движению;
— управляемые колеса тягача на месте поворачиваются в ту или иную сторону до отказа;
— в таком положении тягач совершает поворот в плане на 90°, что определяется фактически по положению его рамы или кузова, и останавливается;
— передние колеса тягача устанавливаются па месте в положение прямолинейного движения, и тягач двигается до завершения поворота прицепным звеном.
Множество проекций всех точек автопоезда на опорную плоскость дороги в процессе движения называется габаритной полосой движения (ГИД) или его следом. При криволинейном движении след автопоезда имеет сложную форму.
Внешняя граница габаритной полосы движения состоит из прямолинейного участка (обычно совпадающего с левым очертанием контура полуприцепа), дуги окружности и прямолинейного выходного участка. Иногда на входе автопоезда в поворот у ГПД появляется криволинейный выступ а. Это свойственно только автопоездам определенной конструкции: седельным с управляемыми колесами полуприцепа или с очень большим задним свесом полуприцепа, а также прицепным с большим задним свесом тягача.
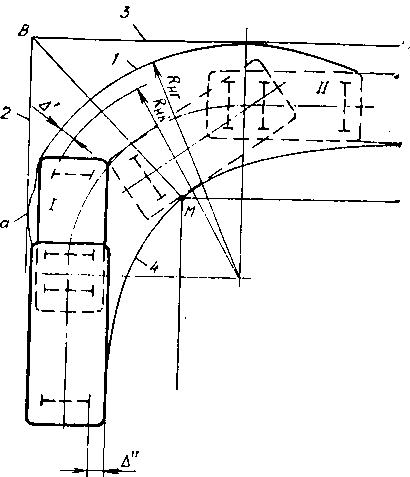
Рис. 3. Схема определения показателя маневренности автопоезда
В современных конструкциях автомобильных поездов полуприцепы с управляемыми колесами распространения не получили. На прицепных же автопоездах достаточно большой задний свес имеют трехосные (и четырехосные) тягачи. Однако даже в этом случае существенное удаление (до 0,2—0,3 м) крайней точки этого выступа относительно габаритного контура автопоезда встречается редко, в основном на автопоездах с одноосными прицепами.
Дуга окружности очерчивается наружным габаритным радиусом.
У автомобиля внутренняя граница следа также представляет собой окружность с двумя сопряженными прямыми на входе и выходе. Что касается автопоезда, то криволинейный участок у внутренней границы следа всегда представляет собой линию переменной кривизны.
Для оценки ГПД различных автопоездов профессором Закиным Я. X. предложен метод упрощения (аппроксимации) формы ГПД, который в одном из вариантов заключается в следующем:
— строятся касательные к внешней криволинейной границе следа, параллельные входному и выходному направлениям движения; в нашем случае при повороте на 90° эти касательные перпендикулярны;
— из точки В пересечения касательных проводится биссектриса полученного угла до пересечения с внутренней границей ГПД в точке М;
— из точки М наносятся прямые, параллельные входной и выходной 3 касательным.
Фигура, ограниченная лучами наружного и внутреннего углов, соответствует угловому проезду, в который вписывается транспортное средство в заданном режиме движения (в нашем случае при предельных возможностях тягача по маневренности).
Основываясь на этом методе, наиболее целесообразно в качестве основного показателя маневренности Ры автопоезда (автомобиля) принять длину биссектрисы ВМ углового проезда, описывающего след транспортного средства при повороте на 90° с минимальным радиусом. Чем меньше этот показатель, тем лучше маневренность.
Практически при определении Рм касательную 2 определяют протягиванием шнура вдоль наружной стенки звена автопоезда, имеющего наибольшую габаритную ширину. Для получения второй касательной отмечают (обычно мелом, краской) сначала след внешнего переднего колеса тягача, от середины которого последовательно откладывают расстояние Д’ удаления внешней габаритной точки: к образованной линии проводят касательную, перпендикулярную к первой. Подобным же образом по размеченному следу заднего внутреннего колеса прицепного звена и величине Д” получают внутреннюю границу 4 ГПД. Построив биссектрису и определив ее длину, определяют величину Рк.
Маневренность у прицепных автопоездов, как показывает табл. 16, обычно лучше, чем у седельных автопоездов. Это можно видеть при сравнении Рм автопоездов с тягачами ЗИЛ-131 (ЗИЛ-131В), Урал-375 (Урал-375С) и другими образцами бортовых и седельных тягачей одного и того же семейства. К этому надо добавить, что на седельных и бортовых тягачах повышенной проходимости по условиям унификации база образца одинакова (база седельного тягача не укорачивается). Уменьшение же показателя маневренности на прицепных автопоездах достигается благодаря двум шарнирам горизонтальной гибкости, положительному влиянию заднего свеса тягача и реже передаточному числу привода управления.
На седельных тягачах, предназначенных для эксплуатации в обычных дорожных условиях (неполноприводных), база, как правило, укорачивается. Так, автомобиль ЗИЛ-130 имеет базу 3800 мм, а седельный тягач ЗИЛ-130В— 3300 мм. По этой причине разница в показателях маневренности у автомобиля ЗИЛ-130 и автопоезда ЗИЛ-130В — ОдАЗ-885 относительно невелика. Укороченные базы имеют седельные тягачи МАЗ-504В, КамАЗ-5410, МАЗ-515Б и др.
Предельная (допустимая) величина показателя маневренности зависит от условий, в которых эксплуатируется транспортное средство. Для автомобилей и автопоездов, используемых на автомобильных дорогах, его величина, как показывает анализ пересечений и примыканий дорог этого типа, не должна превышать 12,5—13 м. При такой величине показателя маневренности и обычных соотношениях геометрических размеров автомобилей и автопоездов поворот транспортного средства возможен на автомобильных дорогах пятой категории с заездом на полосу встречного движения транспортного потока. На дорогах четвертой и высших категорий указанная предельная величина показателя маневренности допускает возможность поворота без заезда на полосу встречного движения транспортных средств.
С точки зрения эксплуатации важным преимуществом седельного автопоезда перед прицепным является его лучшая приспособленность к маневрированию задним ходом. Так как он имеет только один шарнир горизонтальной гибкости (в седельно-сцепном устройстве), его движение задним ходом более определенно и саму операцию по маневрированию выполнять удобнее.
Рекламные предложения:
Главная → Справочник → Статьи → Форум
Механизация земляных работ
Механизация строительства
Механизация дорожных работ
Автоматизация строительства
→ Бетонные работы
→ Мини-тракторы
 Разделы
Разделы
Строительные машины и оборудование
→ Для специальных земляных работ
→ Дорожно-строительные машины
→ Строительное оборудование
→ Асфальтоукладчики и катки
→ Большегрузные машины
→ Строительные машины, часть 2,
→ Дорожные машины, часть 2
→ Ремонтные машины
→ Ковшовые машины
→ Автогрейдеры
→ Экскаваторы
→ Бульдозеры
→ Скреперы
→ Грейдеры
Эксплуатация строительных машин
→ Эксплуатация средств механизации
→ Эксплуатация погрузочных машин
→ Эксплуатация паровых машин
→ Эксплуатация экскаваторов
→ Эксплуатация подъемников
→ Эксплуатация кранов перегружателей
→ Эксплуатация кузовов машин
→ Крановщикам и стропальщикам
Ремонт строительных машин
Ремонт дорожных машин
Ремонт лесозаготовительных машин
Ремонт автомобилей КАмаЗ
Техническое обслуживание автомобилей
Очистка автомобилей при ремонте
Материалы и шины
Остались вопросы по теме:
"Маневренность автопоездов"
— воспользуйтесь поиском.
→ Машины городского хозяйства
→ Естественная история машин
→ Транспортная психология
→ Пожарные автомобили
→ Автомобили-рефрижераторы
→ Монтаж и эксплуатация лифтов
→ Тракторы