Строй-Техника.ру
Строительные машины и оборудование, справочник
Использование гидропривода гусеничного ходового устройства позволяет применить индивидуальный привод каждой гусеницы от отдельного гидромотора и значительно упростить конструкцию поворотной платформы и центральной ходовой рамы. Упрощение конструкции определяется отсутствием длинной кинематической цепи зубчатых и цепных передач, управляемых фрикционных и кулачковых муфт и других узлов, необходимых для экскаваторов с механическим приводом, чтобы передать энергию от расположенного на поворотной платформе двигателя к гусеницам. Конструкция гусениц также упрощается, так как отсутствуют втулочно-роликовые цепи, передающие движение валам ведущих колес гусениц. Поэтому при индивидуальном гидроприводе гусениц нет необходимости во втором натяжном устройстве для натяжения втулочно-роликовой цепи. На каждой из гусениц сохраняется только натяжение гусеничных лент.
Индивидуальный гидропривод гусениц позволяет также обеспечивать разворот экскаватора на месте (относительно оси ходового устройства) за счет движения гусеничных лент в разные стороны. Кроме того, при использовании автоматически регулируемых насосов повышается (без переключения передач) скорость передвижения по хорошей дороге, так как при снижении сопротивления передвижению автоматически увеличивается расход жидкости, поступающей от насосной установки в гидромоторы хода.
Ведущие колеса гусениц приводятся от низкомоментных гидромоторов через редукторы, обычно выполненные в виде отдельных узлов или вмонтированные (полностью или частично) в рамы гусениц (например у моделей Э-5015, Э-5015А.
Рекламные предложения на основе ваших интересов:
Дополнительные материалы по теме:
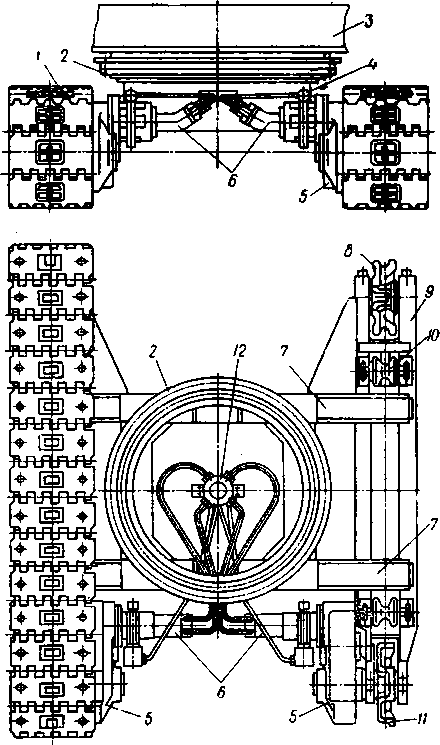
На рис. 1 показан общий вид гусеничного ходового устройства экскаватора ЭО-4121.
На верхней части центральной рамы укреплен опорно-поворотный круг, через который на ходовое устройство передаются нагрузки от установленной на круге рамы поворотной платформы. Поперечные балки центральной рамы опираются на рамы обеих гусениц.
Ведущие колеса гусениц приводятся в действие от аксиально-плунжерных нерегулируемых гидромоторов через редукторы. Рабочая жидкость от расположенной на поворотной раме насосной установки подается через центральный коллектор и трубопроводы к гидромоторам и гидроразмыкателям тормозов гусениц.
На рис. 2 приведена конструкция механизма привода ведущего колеса правой гусеницы экскаватора ЭО-4121 L Корпус редуктора крепят во внутренней стороне концевой вилки рамы гусеницы. Второй опорой является наружная сторона этой же вилки, на которую выходной , вал редуктора опирается через сферический подшипник.
Вращение передается от вала гидромотора через соединительную муфту валу-шестерне, а от него тремя парами передач выходному валу редуктора, на шлицах которого закреплено ведущее колесо гусеницы. Редуктор унифицирован с редуктором механизма поворота; отличие заключается лишь в передаточном отношении первых ступеней и конструкции выходных валов.
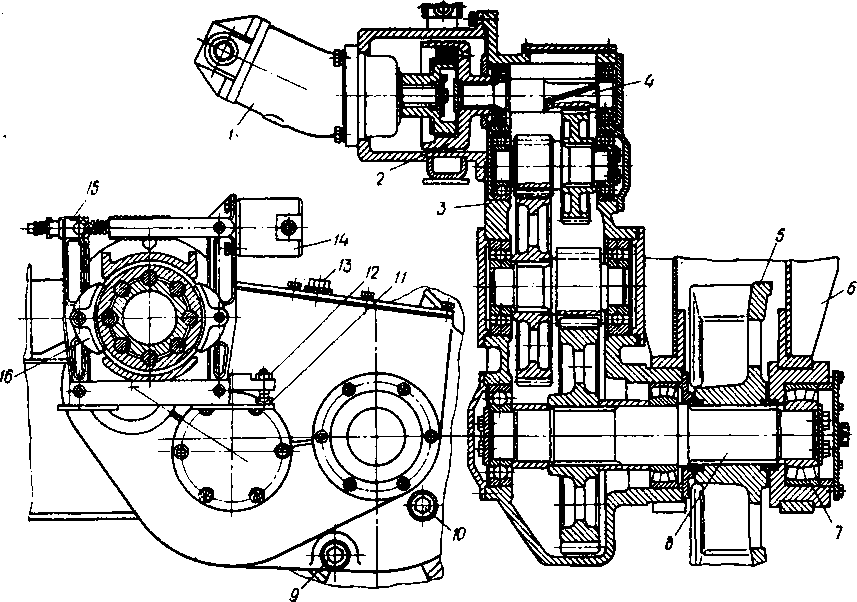
Замкнутый колодочный тормоз типа ТК-200, управляемый с помощью гидроразмыкателя, также полностью унифицирован с тормозом механизма поворота экскаватора ЭО-4121. Величину отхода колодок тормоза регулируют винтом, фиксируемым контргайкой. Назначение тормозов — удерживать экскаватор при работе, разгружая гидромоторы, а также обеспечивать безопасность при спуске с крутых уклонов и стоянке на них.
У экскаваторов, механизмы передвижения которых не оборудованы тормозом (например, у экскаватора ЭО-2131А), применяют управляемые стопоры гусеничного хода, аналогичные используемым на машинах с механической трансмиссией.
Для контроля уровня смазки в редукторе служит пробка, для заливки смазки — отверстие, закрытое пробкой отработанная смазка спускается при отвертывании пробки. При сливе смазки из редуктора следует также отвернуть пробку.
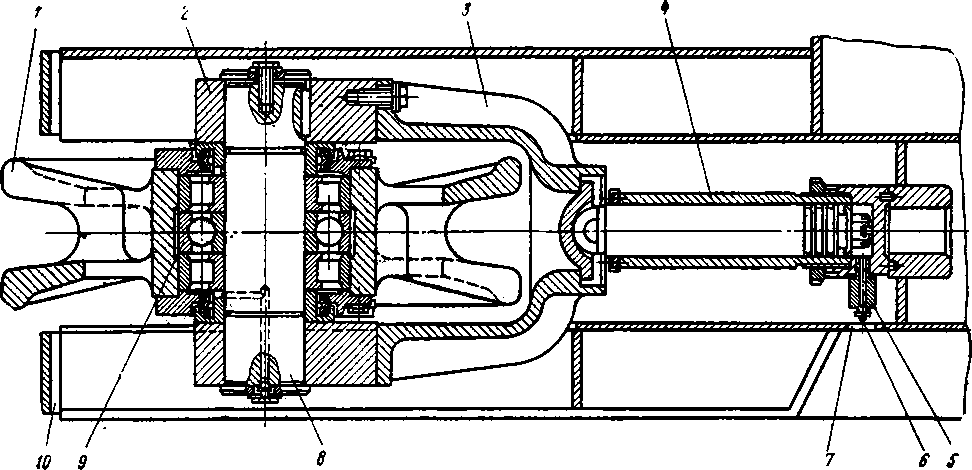
На рис. 3 показано устройство для натяжения гусеничной ленты экскаватора ЭО-4121. Направляющее (натяжное) колесо установлено на роликоподшипниках на оси, укрепленной в ползунах, жестко соединенных с вилкой и перемещающихся в раме гусеницы. Шарикоподшипник не воспринимает радиальных нагрузок и служит для фиксации колеса в осевом направлении.
Гусеничная лента натягивается гидроцилиндром, конец плунжера которого упирается в шаровую опору вилки. Для натяжения ленты густая смазка нагнетается через пресс-масленку в гидроцилиндр, перемещая влево плунжер с вилкой и колесом Л Чтобы ослабить натяжение гусеничной ленты, нужно частично отвернуть штуцер масленки и плавно включить задний ход.
Применение гидропривода для пневмоколесного ходового устройства позволяет так же, как и у гусеничных машин, значительно упростить конструкцию поворотной платформы и ходовой рамы, а также собственно механизм передвижения. Использование многопоточных схем и регулируемых насосов дает возможность упростить (при тех же ходовых мостах, что и у машин с механическим приводом хода) собственно ходовую трансмиссию при обеспечении более удобного управления экскаватором и повышении средней скорости передвижения собственным ходом.
Применение на пневмоколесных экскаваторах автоматически регулируемых насосов с бесступенчатым регулированием производительности (при постоянной мощности) дает возможность улучшить тяговую характеристику машины.
В настоящее время с целью повышения устойчивости пневмоколесных экскаваторов при работе применяют выносные опоры с гидравлическим приводом, управляемым из кабины машиниста. Это позволяет отказаться от стабилизаторов.
Рекламные предложения:
Главная → Справочник → Статьи → Форум
Механизация земляных работ
Механизация строительства
Механизация дорожных работ
Автоматизация строительства
→ Бетонные работы
→ Мини-тракторы
 Разделы
Разделы
Строительные машины и оборудование
→ Для специальных земляных работ
→ Дорожно-строительные машины
→ Строительное оборудование
→ Асфальтоукладчики и катки
→ Большегрузные машины
→ Строительные машины, часть 2,
→ Дорожные машины, часть 2
→ Ремонтные машины
→ Ковшовые машины
→ Автогрейдеры
→ Экскаваторы
→ Бульдозеры
→ Скреперы
→ Грейдеры
Эксплуатация строительных машин
→ Эксплуатация средств механизации
→ Эксплуатация погрузочных машин
→ Эксплуатация паровых машин
→ Эксплуатация экскаваторов
→ Эксплуатация подъемников
→ Эксплуатация кранов перегружателей
→ Эксплуатация кузовов машин
→ Крановщикам и стропальщикам
Ремонт строительных машин
Ремонт дорожных машин
Ремонт лесозаготовительных машин
Ремонт автомобилей КАмаЗ
Техническое обслуживание автомобилей
Очистка автомобилей при ремонте
Материалы и шины
Остались вопросы по теме:
"Механизмы и гидроприводы передвижения экскаваторов"
— воспользуйтесь поиском.
→ Машины городского хозяйства
→ Естественная история машин
→ Транспортная психология
→ Пожарные автомобили
→ Автомобили-рефрижераторы
→ Монтаж и эксплуатация лифтов
→ Тракторы